
Abstract
An unsolved ancient problem in position control of robot manipulators is to find a stability analysis that proves global asymptotic stability of the classical PID control in closed loop with robot manipulators. The practical evidence suggests that in fact the classical PID in industrial robots is a global regulator. The main goal of the present paper is theoretically to show why in the practice such a fact is achieved. We show that considering the natural saturations of every control stage in practical robots, the classical PID becomes a type of saturated nonlinear PID controller. In this work such a nonlinear PID controller with bounded torques for robot manipulators is proposed. This controller, unlike other saturated nonlinear PID controllers previously proposed, uses a single saturation for the three terms of the controller. Global asymptotical stability is proved via Lyapunov stability theory. Experimental results are presented in order to observe the performance of the proposed controller.
Introduction
Stability of PID control in robot manipulators has been subject of extensive research in past and recent years. Most industrial robots are equipped with PID controllers. It has been proved that PID controllers guarantee semiglobal asymptotical stability of the closed-loop equilibrium point in the case of set-point control [1]-[7]. Since PID controllers, until now, have only been proved to be semiglobally asymptotically stable, several nonlinear PID controllers have been proposed [8]-[10]. Unlike linear PID controllers, the nonlinear PIDs yield global asymptotical stability of the closed-loop equilibrium point. Recently, a particular case of the class of nonlinear global PID regulators originally proposed in [10] was presented in [11]. A “delayed” PID, which switched from a PD control to a PID control after a short transient, achieving global asymptotic stability was proposed in [12].
On the other hand, it is known that actuators are unable to supply unlimited torques. Therefore, several controllers taking into account this important physical limitation have been proposed in [13]-[20]. In the case of linear PID controllers with bounded torques, semiglobal asymptotical stability has been proved in [21]-[22]. Nonlinear PID controllers with bounded torques have been proposed in [23]-[26], proving global asymptotical stability. The structure of the controller presented in Theorem 1 of [26] and a similar stability analysis were previously presented in [24]. As far as the authors know, the work introduced in [23] was the first bounded PID-like controller in assuring global regulation; the work, introduced in [24], also guarantees global regulation, but with the advantage of a controller structure which is simpler than that presented in [23]. Other works involving robot tracking controllers with bounded inputs are: [27]-[33].
An unsolved ancient problem in position control of robot manipulators is to find a stability analysis that proves global asymptotic stability of the classical PID control in closed loop with robot manipulators. While this problem remains open, one can not think that the regulation problem of robot manipulators is totally solved [34]. In this sense, it is well known that industrial robot manipulators are equipped with linear PID controllers in order to deal with the position regulation problem [35]. The practical evidence suggests that in fact the classical PID in industrial robots is a global regulator. The main goal of the present paper is theoretically to show why in the practice such a fact is achieved. To this end, notice that in industrial robots (see Fig. 1) the position control is carried out via a control computer doing the job of a position outer proportional loop, which gives the command to the velocity PI servo-drives, intrinsically contained in the hardware of the motor drivers. The overall closed loop system without considering saturation effects results in a classical position PID controller [36].
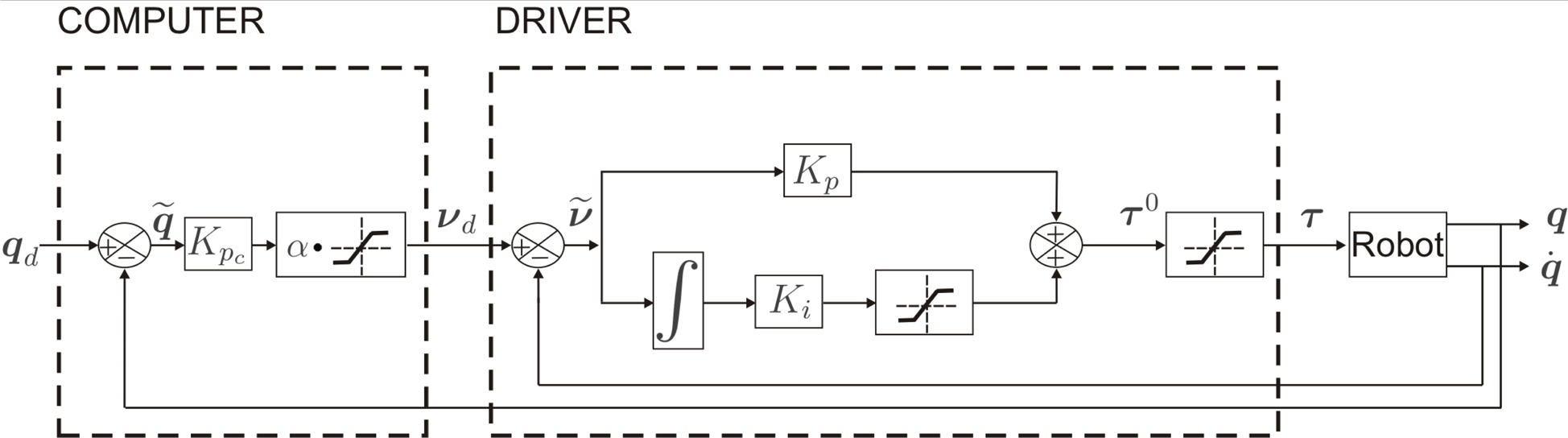
Scheme of the proposed nonlinear PID controller with bounded torques for robot manipulators.
However every control stage suffers saturation effects due to physical constraints of the electronic amplifiers as well as the actuators. In this case, by considering the saturation constraints in each control stage, the classical PID becomes a saturated nonlinear PID control, understanding by this, a nonlinear PID controller —like that proposed by the first time by Prof. Arimoto in [37]—, which now, in our proposed work, is overall saturated by a final saturation due to the effects of the actuator and the PI velocity servo-driver. Unlike other global nonlinear PID controllers such as those proposed in [23]-[26], the control scheme proposed in this paper uses a single saturation function for the proportional, derivative and integral terms (see Fig. 1).
A previous work of some of the authors [38] presents a PID controller with a similar structure, but concluding only local asymptotic stability. In contrast, now the proposed controller in this work, holds an industrial structure, but ensuring global asymptotic stability.
The paper is structured as follows: In Section II, we present some preliminaries; In Section III, we present the proposed controller and the stability analysis; in Section IV, we present experimental results which show the performance of the proposed controller, while Section V presents the conclusions of the paper.
Throughout this paper, we use the notation
Robot dynamics
The dynamics of a n-link serial rigid robot manipulator, considering viscous friction, can be expressed as [39],[40]:

where q ∊ ℝ
n
is the vector of joint positions,

We assume that the links are joined together with revolute joints.
Some important properties of dynamics (1) are the following [39], [40]:
Property 1. The matrix

for all

Property 2. There exists a positive constant k
c
such that for all

Property 3. The gravitational torque vector g(q) is bounded for all

for all

for all
Property 4. There exists a positive constant k g such that

for all
Consider the robot dynamics (1). Assume that each actuator is capable of supplying a maximum torque
for all

where γ i was defined in Property 3. This assumption means that the actuators are capable of holding the robot at rest at any desired joint positions vector q d .
The control problem is to design a controller to compute the torque vector τ applied to the joints, satisfying (2), such that the joint positions vector q tends asymptotically toward the desired joint positions vector q d .
Before presenting the main contribution of this paper, we present some defintions of the saturation functions that we use throughout our work.
Definition 1. [9]

such that
Definition 2. The hard saturation function
where δ i is the i-th saturation limit, and

for i = 1,2,…,n.
Some properties of the saturation functions defined above are:
Property 5. [9] From Definition 1, it can be proved that:
for all

for all
Property 6. [9] From Definition 1, we have that:

and

where Γ is a diagonal positive definite matrix, and the notation
Property 7. [25] From Definition 1 and 2 it is easy to see that, for all δ i ε with i = 1,2,…,n, we have:

and

where Γ is a diagonal positive definite matrix.
Property 8. [25] The hard saturation function satisfies, for all k>0:

Property 9. [43] The hard saturation function satisfies, for all x,y ∊ ℝ n :

Property 10. [25] The integral of a hard saturation function

Main contribution
In this section we present the main contribution of the paper: a nonlinear PID controller with bounded torques that yields global asymptotical stability, providing a solution to the global set-point control of industrial robot manipulators, that uses the classical PID, but now considering the saturation effects in every control stage and torque constraints of the actuators.
Fig. 1 shows the general scheme of the proposed controller. The controller is formed by two control loops: an outer joint position proportional (P) loop and an inner joint velocity proportional—integral (PI) loop. The scheme considers saturation effects of the commands suppplied by the computer, as well as torque limitations of the actuators and servo-drivers.
Control scheme
The classical PID controller, considering saturation effects as shown in Fig. 1, may equivalently be expressed as:

Omitting the saturation limits in (3) we have:

with

where τ
p
, τ
I
and τ
pid
are the saturation limits vectors such that from the limitations of the real actuators, τ
pid
i
τ
i
max for i = 1,2,…,n. K
p
, K
pc
and K
i
are diagonal positive definite matrices whose elements are k
p
i
, k
pc
i
and k
i
i
respectively for
The closed-loop equation is obtained by substituting control law (3) in robot dynamics (1):

We now present some assumptions that are required in order to prove the main result.
Assumption 1. Saturation limits are chosen so that they satisfy:

for all i = 1,2,…, n, with γ i defined in Property 3. From (5) and (6) it can also be observed that τ pid i >γ i .
Assumption 2. Matrix K* p is chosen such that it satisfies:

where
Assumption 3. Positive constant α is chosen small enough so that it satisfies

where

Notice that the equilibrium points of the closed-loop system (4) are given by:

Under Assumption 1, (8) is equivalent to:

Therefore, the only equilibrium point of (4) is given by:

We are now ready to present our main result.
Proposition 1. Controller (3) in closed loop with robot dynamics (1), under Assumptions 1, 2 and 3, yields global asymptotical stability of equilibrium point (9), globally achieving the control objective, and applied torques remain bounded according to (2).
Proof. Proof of Proposition 1 is carried out through Lyapunov stability theory. We propose the Lyapunov function candidate:

Where

From Property 10 it is straightforward to see that

where

and β is a positive constant such that
Notice that, under Assumption 1

Therefore, from Definition 2:

or, equivalently

Then, considering (10), and adding and substracting the term
where

Negative semidefiniteness of
where Properties 2-9 were used. Therefore,

where

and a has been defined in (7). Under Assumptions 2 and 3, Q is a positive definite matrix. Negative semidefiniteness of
Experimental tests were carried out to show the performance of the proposed nonlinear PID with bounded torques. The control scheme was tested in a prototype of two-revolute joint robot manipulator used in [44], located at Instituto Tecnologico de la Laguna (see Figure 2).

Prototype robot.
For comparison purposes, tests were also carried out with the classical PID controller, given by:

where
and K p , K v and K i are n × n positive definite diagonal matrices.
The desired joint positions were chosen as q d 1 = 45 [deg] and q d 2 = 45 [deg]. Controller parameters are shown in Table 1.
Controller parameters.

Figs. 3 and 4 show the time response of joint 1 and 2 position errors, respectively, for both, the proposed saturated PID in equation (3) and the classical PID in (13); it can be observed that position errors in the saturated PID case converge faster to zero (1.5 sec. for joint 1 and 0.7 sec. for joint 2). In contrast, the position errors of the classical PID controller arrive faster close to zero, but hold nonzero position errors in the first 5 seconds. The position errors go to zero in a time greater than 5 seconds.
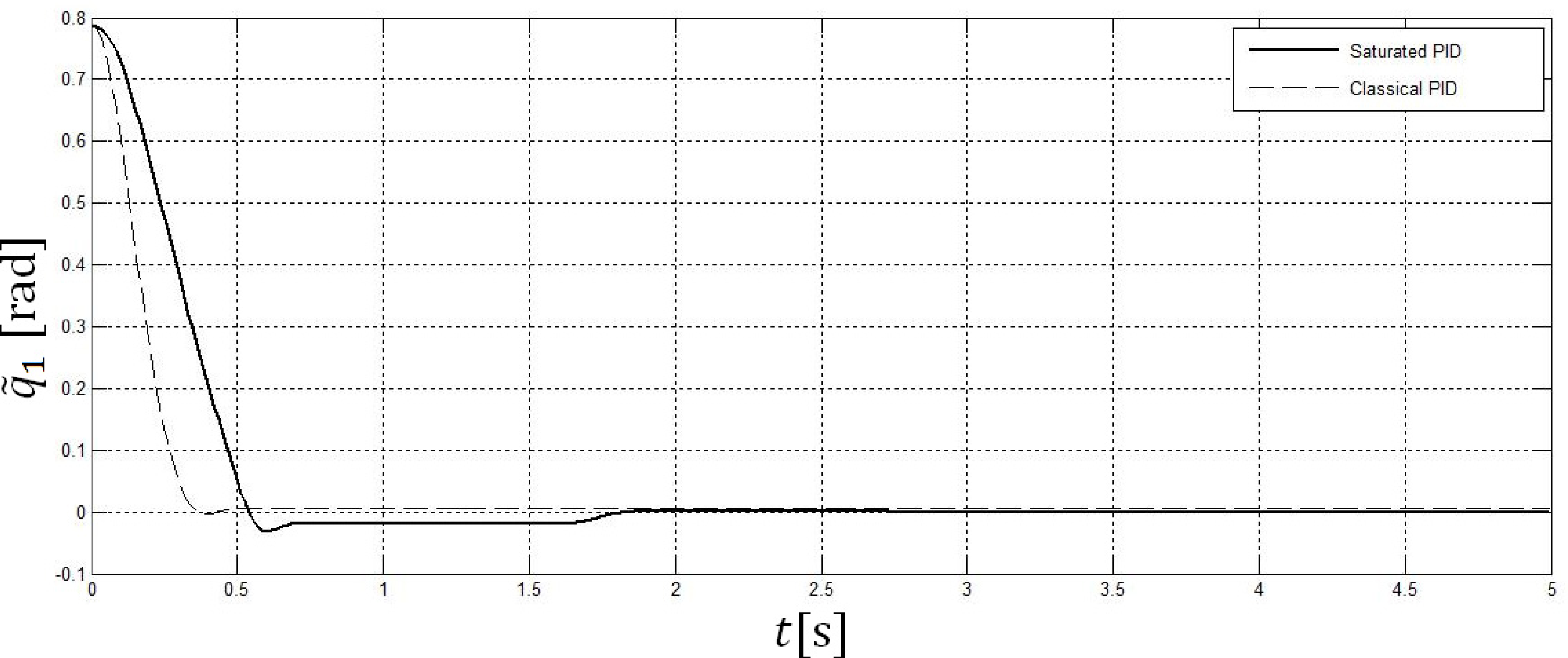
Joint 1 position error.

Joint 2 position error.

Joint 1 applied torque.

Joint 2 applied torque.
Figs. 5 and 6 show the applied torque to joint 1 and 2, respectively, for both controllers; it can be observed that applied torques remain within the maximum torques supplied by the actuators. The reason why the position errors with the new saturated PID controller (3) go to zero faster than with the classical PID (13) is the feature of using larger proportional gains. In the classical PID controller (13) it was not possible to increase the proportional gains because the maximum torque that can be provided by the actuators would be exceeded.
In this paper we analized the stability of the classical PID controller taking into account the natural saturation effects of the commands supplied by the computer and the torque applied by the servo-drivers. By considering these saturation effects the classical PID converts into a new nonlinear PID controller with bounded torques. Global asymptotic stability of the closed-loop system was proved via Lyapunov stability theory. Experimental results were presented in order to observe the performance of the proposed controller.
Footnotes
6.
This work is partially supported by CONACYT project 134534, DGEST and SIP-IPN project 20110375.