
Abstract
The paper studies sensorless control for DC and induction motors, using Kalman Filtering techniques. First the case of a DC motor is considered and Kalman Filter-based control is implemented. Next the nonlinear model of a field-oriented induction motor is examined and the motor's angular velocity is estimated by an Extended Kalman Filter which processes measurements of the rotor's angle. Sensorless control of the induction motor is again implemented through feedback of the estimated state vector. Additionally, a state estimation-based control loop is implemented using the Unscented Kalman Filter. Moreover, state estimation-based control is developed for the induction motor model using a nonlinear flatness-based controller and the state estimation that is provided by the Extended Kalman Filter. Unlike field oriented control, in the latter approach there is no assumption about decoupling between the rotor speed dynamics and the magnetic flux dynamics. The efficiency of the Kalman Filter-based control schemes, for both the DC and induction motor models, is evaluated through simulation experiments.
Keywords
1. Introduction
During the last years, there has been significant effort in improving the performance of electric motors. DC (direct current) motors are widely used in industrial systems, such as robotic manipulators, because their control is relatively simple and they are reliable for a wide range of operating conditions. DC motors are usually modelled as linear systems and then linear control approaches are implemented. Additionally, controllers for nonlinear DC motor models have been developed. On the other hand, the applications of induction motors (IM) are mainly concerned with motion transmission systems. Induction motors have been the most widely used machines in fixed-speed applications for reasons of cost, size, weight, reliability, ruggedness, simplicity, efficiency, and ease of manufacture. With the field-oriented method, the dynamic behavior of the induction motor is rather similar to that of a separately excited DC motor (Rigatos 2009a).
The possibility to reduce the number of sensors involved in the control of electric motors has been a subject of systematic research during the last years (Holtz 2002), (Hilairet et al. 2009), (Borsje et al. 2005). As a result, state estimation-based control has become an active research area in the field of electric machines and power electronics. In the control of robotic manipulators, which is actually control of the DC motors that rotate the robot's joints, the angle of each joint is usually measured with the use of an optical encoder. High performance robot control systems also call for velocity and acceleration information from the joints. However, to reduce equipment cost and to simplify installation and maintenance, tachometers and accelerometers are not always used in the robotic control loops. In other cases the information from tachometer and accelerometer measurements is replaced by the fusion of measurements from encoders and external sensors, such as cameras, laser trackers, etc. Thus, one should be able to deduce the velocity and acceleration of the robot's joints from angular position measurements, using state estimators (Rigatos 2009b), (Rigatos 2008),(Rigatos 2009c). Furthermore, speed estimation methods have been of great interest among induction motor control researchers. Elimination of the speed sensors has the advantages of lower cost, ruggedness as well as increased reliability. Again to reconstruct the state vector of the induction motor, from a sequence of angular position measurements and the associated voltage input measurements a state observer has to be used.
The Kalman Filter is a special kind of observer that provides optimal filtering of process and measurement noises if the covariances of these noises are known. For linear systems subject to Gaussian measurement or process noise the Kalman Filter is the optimal state estimator, since it results in minimization of the trace of the estimation error's covariance matrix (Kamen Su 1999), (Basseville Nikiforov 1993), (Xiong 2008), (Rigatos Tzafestas 2007a). For nonlinear systems, subject to Gaussian noise one can use the generalization of the Kalman Filter as formulated in terms of the Extended Kalman Filter (EKF). The Extended Kalman Filter is based on a linearization of the systems' dynamics using a first order Taylor expansion (Rigatos Zhang 2001). Although EKF is efficient in several estimation problems, it may be subject to cumulative errors due to the local linearization assumption and this may affect the accuracy of the state estimation or even risk the stability of the observer-based control loop.
To overcome the EKF flaws, the Unscented Kalman Filter can be also considered. UKF is a derivative-free state estimation method of high accuracy. The state distribution in UKF is approximated by a Gaussian random variable, which is represented using a minimal set of suitably chosen weighted sample points. These sigma points are propagated through the true nonlinear system, thus generating the posterior sigma-point set, and the posterior statistics are calculated. The sample points progressively converge to the true mean and covariance of the Gaussian random variable (Rigatos 2009d), (Rigatos 2009e). The Unscented Kalman Filter has been proposed as a suitable approach for overcoming certain drawbacks of the Extended Kalman Filter, such as (i) the need to compute Jacobians and (ii) the cumulative linearization errors which are due to truncation of higher order terms in the associated Taylor series expansion of the motor's dynamical model. The use of the Unscented Kalman Filter for state estimation and control of nonlinear electric motor models is a relatively new and promising topic. In (Akin et al. 2003) and (Akin et al. 2006) the Unscented Kalman filter (UKF) has been applied to state observation in field oriented control of an induction motor. The UKF enables to estimate rotor speed and dq-axis flux of an induction motor through the processing of only the stator currents and voltages. In (Kumar et al. 2011) the Unscented Kalman Filter (UKF) has been compared to the Extended Kalman Filter for the state estimation of a three-phase induction motor. In (Karami et al. 2010) the Unscented Kalman Filter is applied to state estimation for fault diagnosis of induction motors. Comparison between the estimated and the real output measurements enables the detection of failures in the motor's components. Finally, in (Akin et al. 2004) the Unscented Kalman Filter (UKF) and Extended Kalman Filter (EKF) are analyzed and compared both experimentally and theoretically in the problem of non-linear state estimation for field-oriented sensorless control of AC drives.
The current paper studies sensorless control for DC and induction motors using Kalman Filtering techniques. The structure of the paper is as follows: In Section 2 the dynamic model of the DC motor is explained and control for the nonlinear DC motor model is analyzed. In Section 3, the field-oriented induction motor model is analyzed. In Section 4, flatness-based control for the complete (sixth-order) induction motor model is analyzed. In Section 5 Kalman Filtering for the DC motor model is introduced. Moreover, the Extended Kalman Filter is proposed to estimate the state vector of the nonlinear electric motor using a limited number of sensors, and control of the induction motor is again implemented through feedback of the estimated state vector. In Section 6, the Unscented Kalman Filter is used to estimate the induction motor's state vector and subsequently a state estimation-based control loop is implemented. In Section 7 the efficiency of the above mentioned Kalman Filter-based control schemes, for both the DC and induction motor models, is tested through simulation experiments. Finally, in Section 8 concluding remarks are given.
2. DC motor modelling and control
2.1. DC motor model
The linear model of the DC motor shown in Fig. 1 is described by the set of equations

with the following notations

Next, control for a nonlinear DC motor model will be presented. Usually the DC-motor model is considered to be linear by neglecting the effect of armature reaction or by assuming that the compensating windings remove this effect. Introducing the armature reaction leads to a nonlinear system. In that case the dynamic model of the DC-motor model can be written as an affine in-the-input system (Horng 1999):

with

where
where

Thus the input-output relation can be written as

where,

Then, setting the output to be

The aforementioned system of Eq. (8) can be written in the Brunovsky (canonical) form:

where

Parameters of the DC motor model
2.2. Control of the nonlinear DC motor model
The design of the nonlinear DC motor controller is according to the flatness-based control theory. The main principles of flatness-based control are as follows (Martin Rouchon 1996), (Rudolph 2003), (Flies Mounier 1999), (Villagra et al 2007). Flatness-based control can be applied to finite dimensional system of the form

The quantity w denotes the system variable while

such that the following two conditions are satisfied (Flies Mounier 1999),(Rigatos 2008):
There does not exist any differential relation of the form

which implies that the derivatives of the flat output are not coupled in the sense of an ODE, or equivalently it can be said that the flat output is differentially independent.
All system variables, i.e. the components of w (elements of the system's state vectors) can be expressed using only the flat output y and its time derivatives

An equivalent definition of differentially flat systems is as follows:
Definition: The system
For the motor model of Eq. (3) and Eq. (4) an appropriate control law that satisfies the aforementioned flatness properties is

with

where the supervisory control term
3. Control of the field-oriented induction motor model
3.1. Field-oriented induction motor model
Control for induction motors is also studied. With the field-oriented method, the induction motor dynamics is rather similar to that of a separately excited DC motor (Wai and Chang 2001), (Nounou Rehman 2007), (Wai Chang 2004). A decoupled relationship is obtained after a proper selection of state coordinates and thus, the rotor speed is asympotically decoupled from the rotor flux, while the speed can be controlled only by the torque current as shown in (Bodson et al. 1994), (Marino et al. 1991), (Leonard 1985), (Wai Chang 2003), (Lin et al 2000).
To derive the dynamic model of an induction motor the three-phase variables are first transformed to two-phase ones. This two-phase system can be described in the stator-coordinates frame
The state vector of the motor is defined as

with


J is the rotor's inertia, and
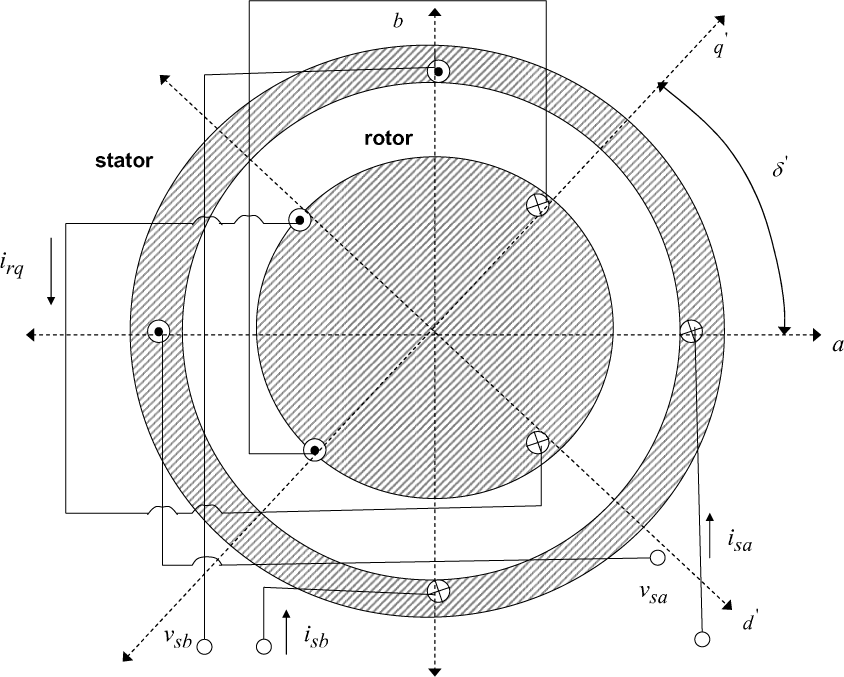
AC motor circuit, with the
3.2. Decoupling of speed-flux dynamics in the field-oriented induction motor
The classical method for induction motors control is based on a transformation of the stator's currents (

where

The control signal in the coordinates system


Substituting Eq. (22) into Eq. (17) one obtains



The system of Eq. (23) to Eq. (27) consists of two linear subsystems, where the first one has as output the magnetic flux



If
The subsystem that is described by Eq. (28) and Eq. (29) is linear and has as control input

If Eq. (32) is applied to the subsystem that is described by Eq. (28) and Eq. (29), then one can succeed
Now the subsystem that consists of Eq. (30) and Eq. (31) is examined. The term
4. A flatness-based control approach for induction motors
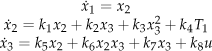
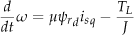
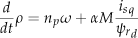
In (Martin Rouchon 1996) the voltage-fed induction machine was shown to be a differentially flat system. It has been shown that the angle of the rotor position (rotation angle θ) and the angle ρ of the magnetic field (angle between flux
The equations of the induction motor in the





The flat outputs for the voltage-fed induction motor are the angle of the rotor θ and variable ρ, where ρ has been defined as the rotor flux angle. According to (Dannehl Fuchs 2006), if the stator current dynamics are much faster than the speed and flux dynamics a faster inner current control loop can be designed using only Eq. (35) and Eq. (36) and assuming the speed and flux as constants. For the outer speed and flux control design the stator currents are treated as new control inputs and the system behavior is described by Eq. (33), Eq. (34) and Eq. (37). This system of lower order is also flat with
It can be shown that all state variables of the induction motor can be written as functions of the flat outputs and their derivatives. Moreover, using Eq. (35) and Eq. (36) a controller that satisfies the flatness properties (and thus it can be also expressed as a function of the flat outputs and their derivatives) is defined as follows:


where


where


Tracking of the reference setpoint can be also succeeded for the rotor's speed and flux through the application of the control law of Eq. (38) and Eq. (39) to Eq. (33) and Eq. (37). The control inputs are chosen as


Denoting


The convergence of the tracking error to zero can be assured through the application of the following feedback control laws:


5. Kalman and Extended Kalman Filtering for linear electric motor models
5.1. The discrete-time Kalman Filter for the Linear Electric Motors
For the DC motor models described in Section 2 the Kalman Filter is an efficient state estimator. Kalman Filtering can be applied to discrete-time state models of the form

where the state
Measurement update: acquire



Time update: compute


where
It can be observed that the recursion of the Kalman Filter given by Eq. (51) and Eq. (54) is also applicable to the nonlinear DC motor model of Eq. (3) and Eq. (4) if the latter system is written in the form of Eq. (10) and the measured output is taken to be
5.2. Extended Kalman Filter for nonlinear electric motor models
The following nonlinear time-invariant state model is now considered (Rigatos Tzafestas 2007a):

where

where

Likewise, γ is expanded about

where
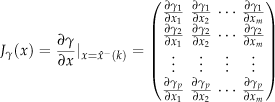
The resulting expressions create first order approximations of φ and γ. Thus the linearized version of the plant is obtained:

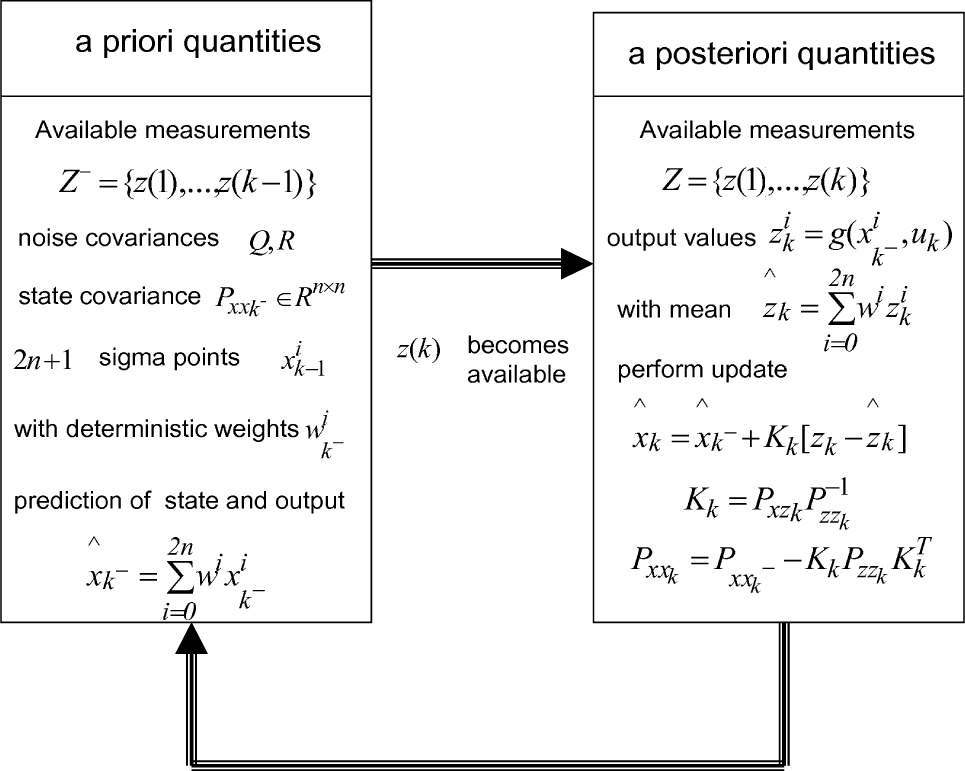
Now, the Extended Kalman Filter (EKF) recursion is as follows: First the time update is considered: by
Measurement update. Acquire

Time update. Compute:

The schematic diagram of the EKF loop is given in Fig. 3. The Extended Kalman Filter is applicable to nonlinear electric motor models, such as the induction motor described in Sections 3 and 4.

Schematic diagram of the EKF loop

Example of approximation of a 2D distribution by the Sigma-Point Kalman Filtering approach
6. Unscented Kalman Filter for nonlinear electric motor models
The Unscented Kalman Filter (UKF) is a nonlinear state estimator of high accuracy, as analyzed in (Julier et al. 2000), (Julier Uhlmann). The state distribution is represented again by a Gaussian Random Variable but is now specified using a minimal set of deterministically chosen weighted sample points. The basic sigma-point approach can be described as follows:
A set of weighted samples (sigma-points) are deterministically calculated using the mean and square-root decomposition of the covariance matrix of the prior random variable. As a minimal requirement the sigma-point set must completely capture the first and second order moments of the prior random variable. Higher order moments can be captured at the cost of using more sigma-points.
The sigma-points are propagated through the true nonlinear function using functional evaluations alone, i.e. no analytical derivatives are used, in order to generate a posterior sigma-point set.
The posterior statistics are calculated (approximated) using tractable functions of the propagated sigma-points and weights. Typically, these take on the form of a simple weighted sample mean and covariance calculations of the posterior sigma points.
The sigma-point approach results in posterior approximations that are accurate to the third order for Gaussian inputs for all nonlinearities. For non-Gaussian inputs, approximations are accurate to at least the second-order, with the accuracy of third and higher-order moments determined by the specific choice of weights and scaling factors. Furthermore, unlike EKF no analytical Jacobians of the system equations need to be calculated as in the case for the EKF. The concept of UKF for approximating the distribution of a system's state is given in Fig. 4 (van der Merwe et al. 2004). It can be observed that comparing to EKF, the UKF (sigma-point) approach succeeds improved estimation of the state vector's mean value and covariance (only 5 points are needed to approximate sufficiently the 2D distribution).
The UKF is a special case of Sigma-Point Kalman Filters. The UKF is a discrete time filter which uses the unscented transform for approximating solutions to the filtering problem of the form

where
1) Denoting the state vector mean as

and the associate weights are computed:

Matrix
2) Transform each of the sigma points as

3) Mean and covariance estimates for z can be computed as

The cross-covariance of x and z is estimated as

The matrix square root of a positive definite matrix
Time update: Compute the predicted state mean

Measurement update: Obtain the new output measurement

Then compute the filter gain

The filter starts from the initial mean
7. Simulation tests
The concept of the simulation experiments was as follows: For linear electric motor models subject to Gaussian measurement or process noise the Kalman Filter is the optimal state estimator, since it results in minimization of the trace of the estimation error's covariance matrix. For nonlinear electric motor models, subject to Gaussian noise one can use the Extended Kalman Filter. Finally, to overcome some limitations of the EKF (such as the need to calculate Jacobians and cumulative estimation errors due to approximative linearization), the Unscented Kalman Filter can be used.
7.1. Kalman Filter-based control of the DC motor model
The DC motor of Eq. (3) and Eq. (4) in its linearized form of Eq. (10) is considered. The control law of Eq. (15) is used to make the motor track the desirable trajectory. The state vector x used in the control law is estimated through Kalman Filtering, as described in Eq. (51)-Eq. (54). To generate Gaussian noise Matlab's function randn() was used. The process and measurement noises were considered to be uncorrelated. The process noise covariance matrix was taken to be
Schematic diagram of the UKF loop
To perform sensorless control only measurements of the rotor's angle θ were used. The sampling period was taken to be
7.2. Extended Kalman Filter-based control of the field-oriented induction motor
The nolinear model of the decoupled field-oriented induction motor, given in Eq. (30) and Eq. (31), was considered. The model's state variables were taken to be

and which is given by

Likewise, γ is expanded about

where

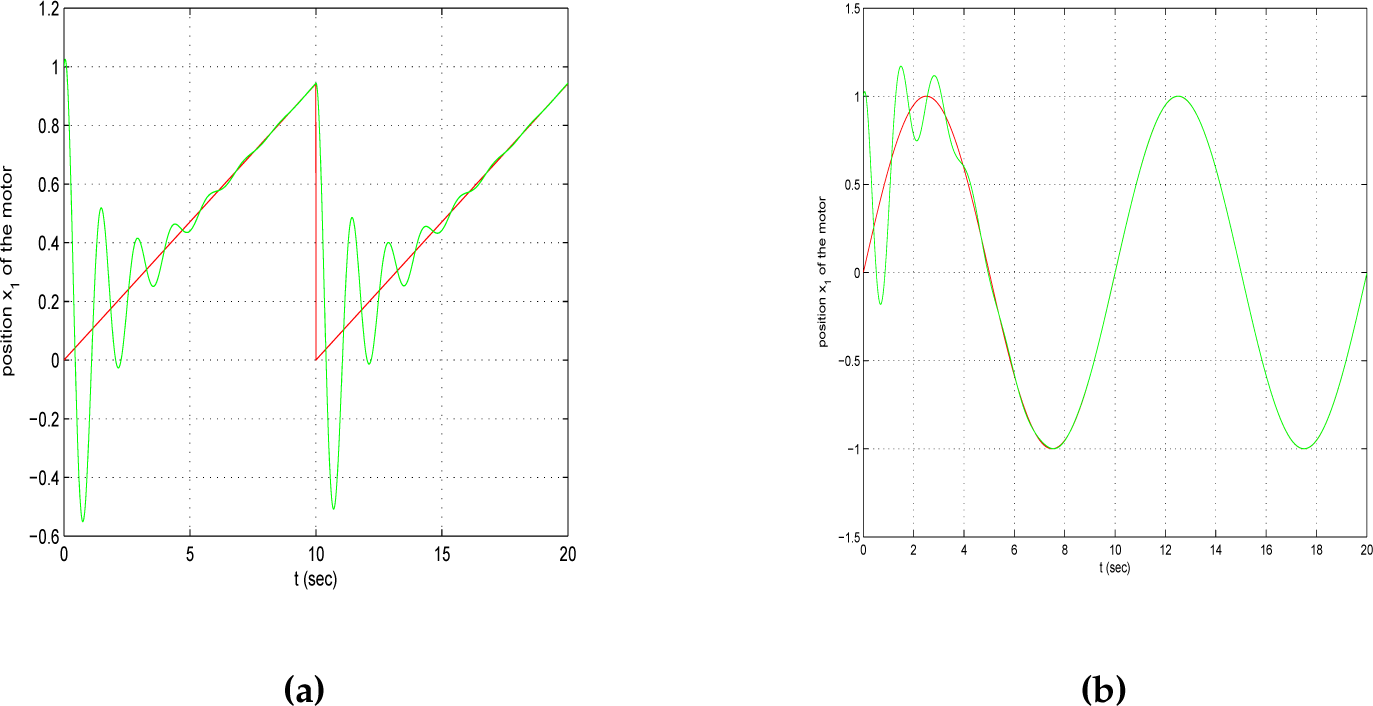
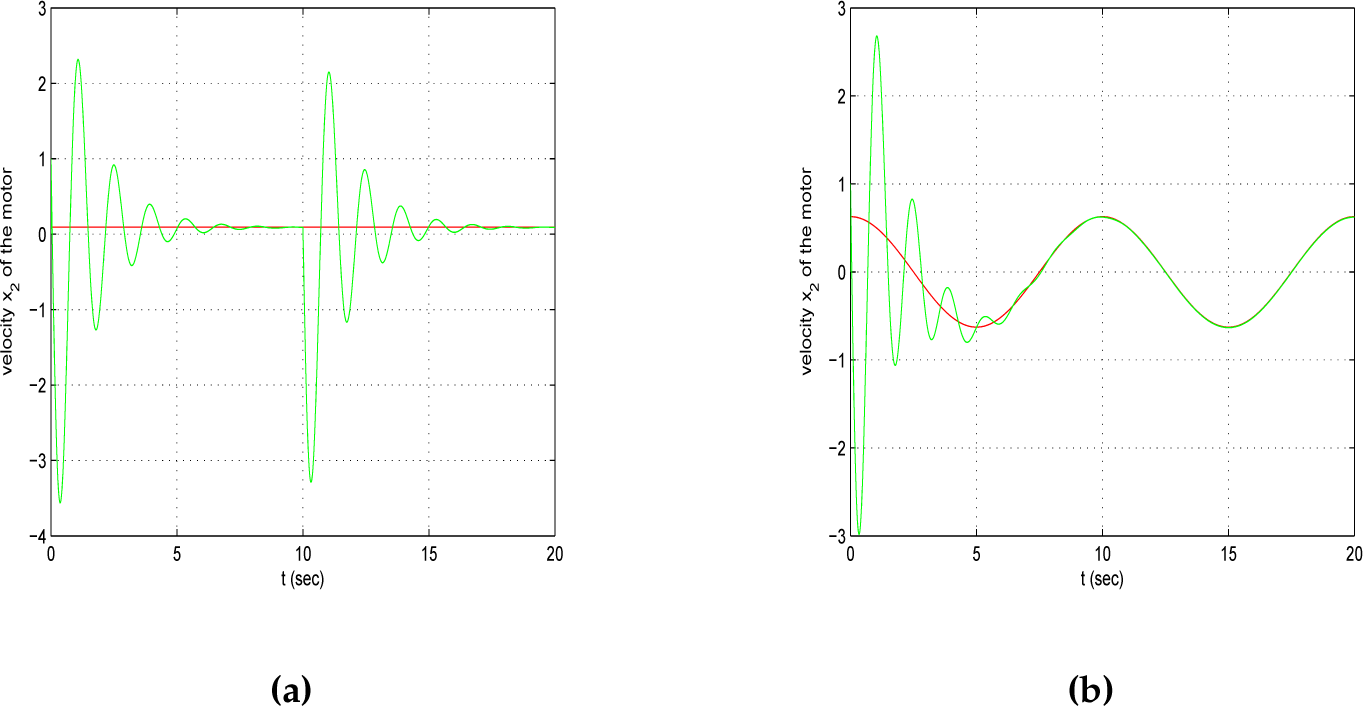
To implement sensorless control for the decoupled field-oriented induction motor model only measurements of the rotor's angle θ where used. Again the tracking performance of the proposed control scheme was tested in the case of a sinusoidal and a see-saw setpoint. As it can be seen in Fig. 10 and Fig. 11 the sensorless controller succeeded asympotic elimination of the tracking error despite abrupt changes in the reference trajectory, or the existence of process and measurement noises. The control signal of the Extended Kalman Filter-based control loop is depicted in Fig. 12.
7.3. Unscented Kalman Filter-based control of the induction motor model
In Unscented Kalman Filter-based control a set of suitably chosen weighted sample points (sigma points) were propagated through the nonlinear system and used to approximate the true value of the system's state vector and of the state vector's covariance matrix. The UKF algorithm consisted of two-stages, the time update and the measurement update, which are summarized as follows:
The time update of the UKF is

The measurement update of the UKF is

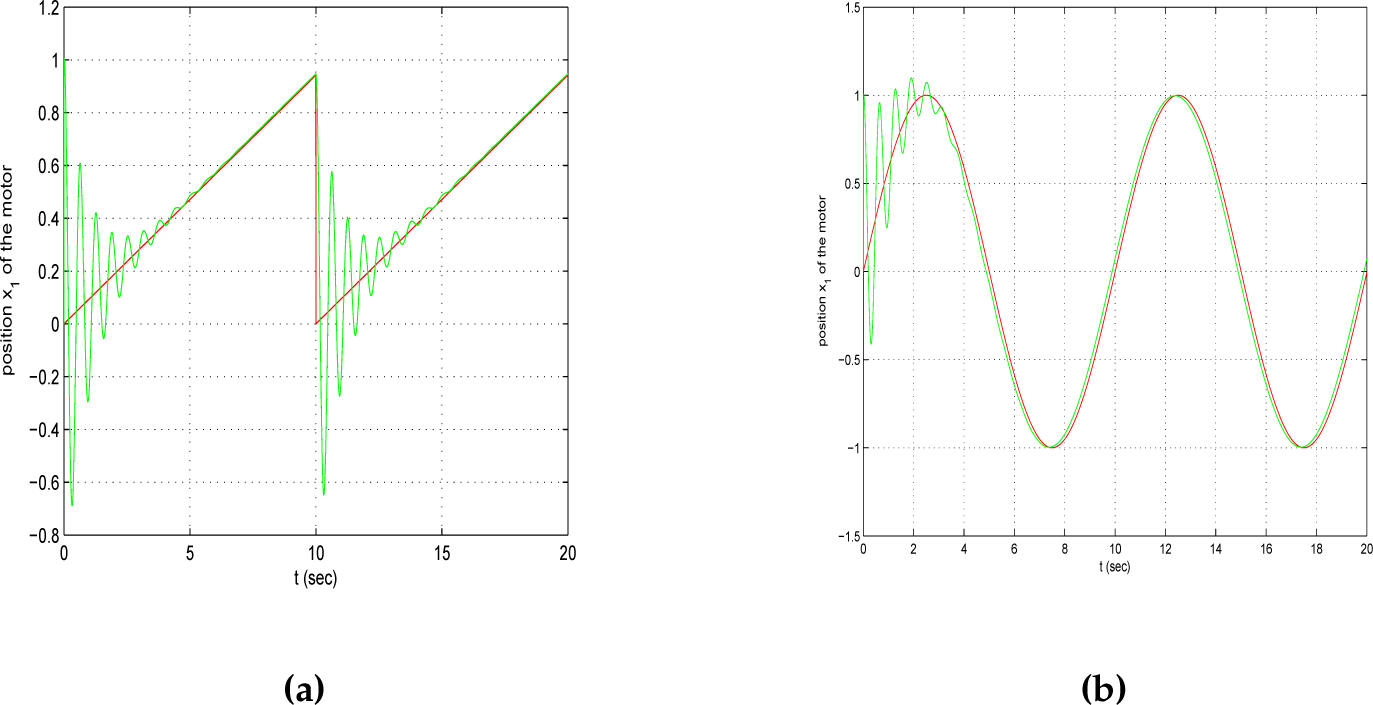
The simulation experiments of Fig. 13 and 14 show the good tracking performance of the UKF-based control loop, in the case of time varying setpoints (such as see-saw and sinusoidal reference trajectories). Furthermore, the diagrams presented in Fig. 15 show that the control signal, which is applied to the decoupled field-oriented induction motor model, remains smooth.

Parameter

Parameter

Parameter

Control signal of the Kalman Filter-based control loop for the DC motor model (a) when tracking a see-saw setpoint (b) when tracking of a sinusoidal setpoint
Parameter
Parameter
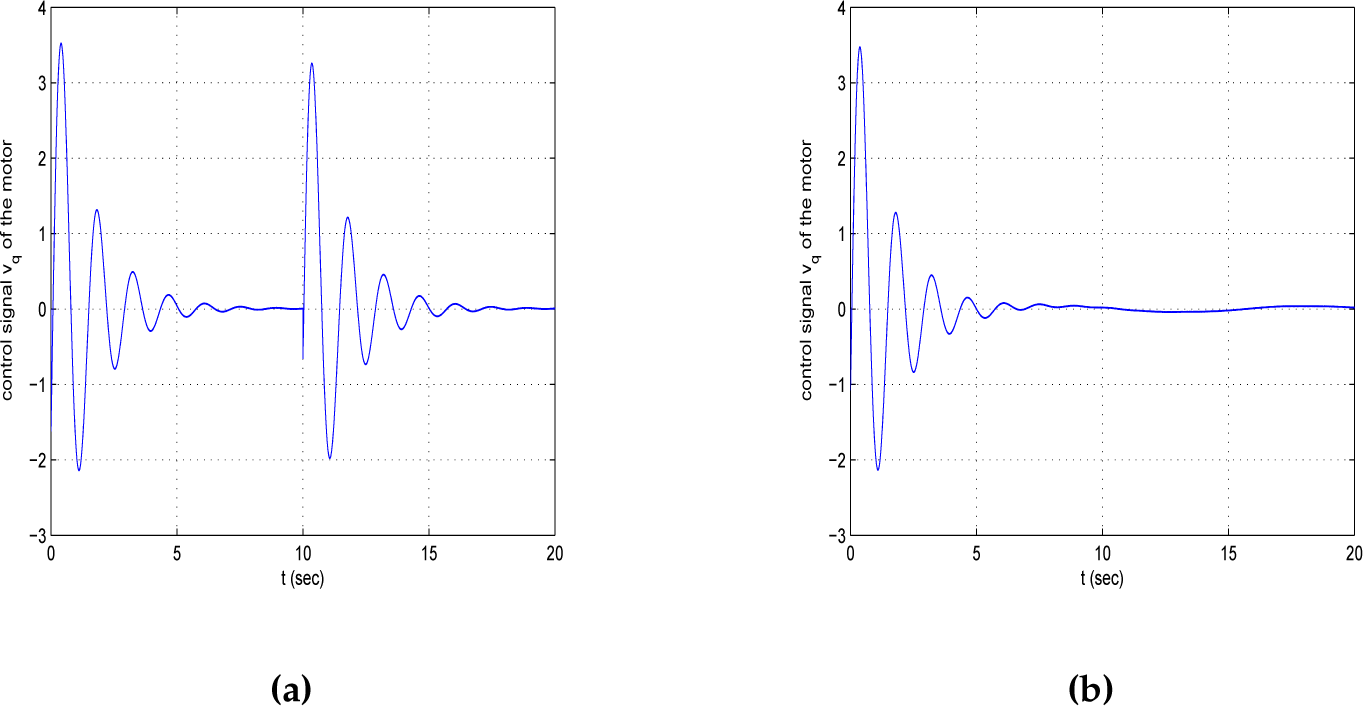
Control signal of the Extended Kalman Filter-based control loop for the field-oriented induction motor model (a) when tracking of a see-saw setpoint (b) when tracking of a sinusoidal setpoint
Parameter

Parameter
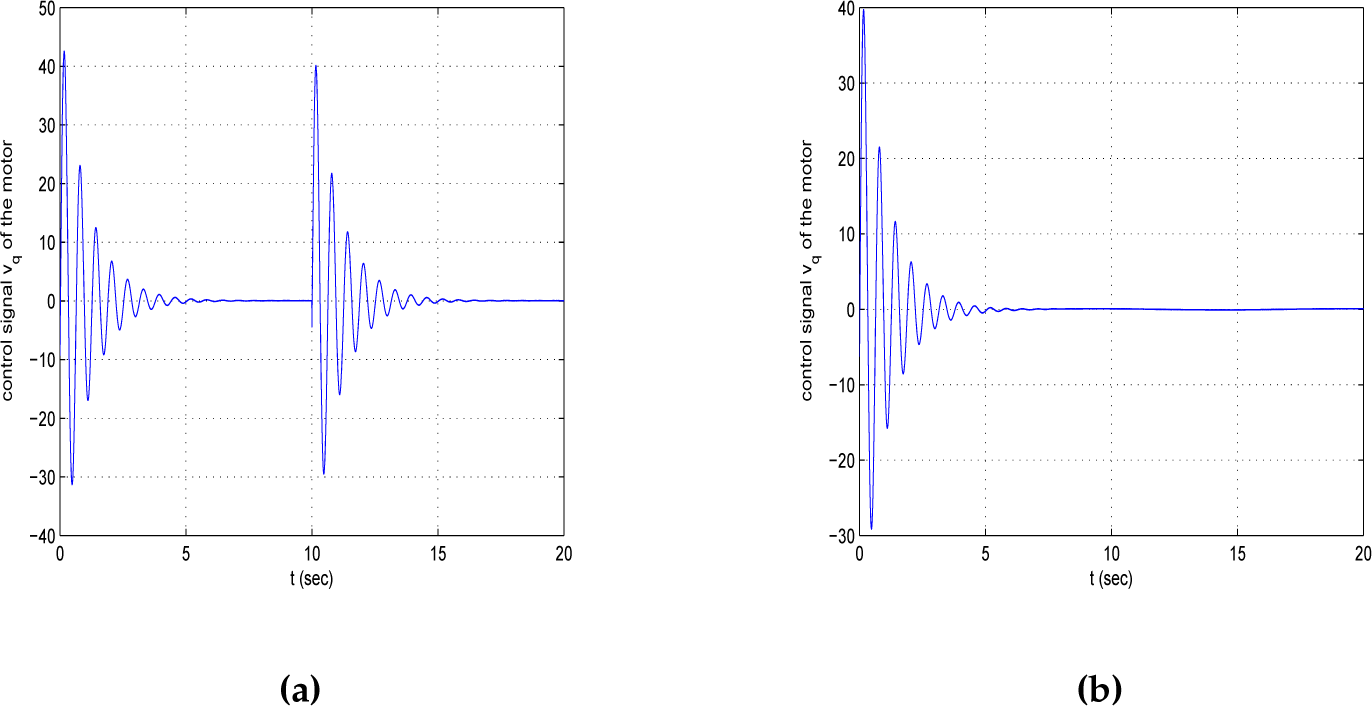
Control signal of the Unscented Kalman Filter-based control loop for the field-oriented induction motor model (a) when tracking a see-saw setpoint (b) when tracking of a sinusoidal setpoint

Schematic diagram the proposed flatness-based control scheme with the use of Extended Kalman Filtering

Flatness-based control of the induction motor with the use of Extended Kalman Filtering in case of tracking a seesaw setpoint (a) rotor's angle θ (b) rotor's speed ω
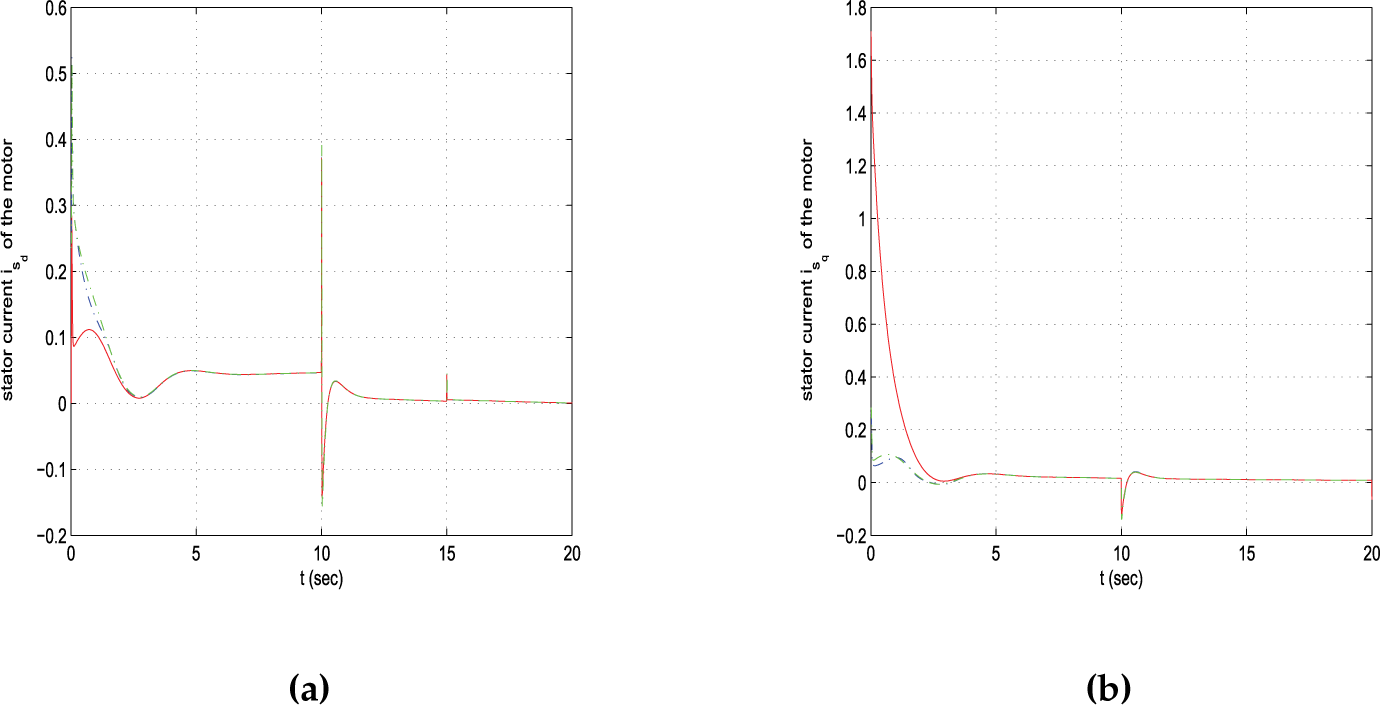
Flatness-based control of the induction motor with the use of Extended Kalman Filtering in case of tracking a seesaw setpoint (a) stator's current

Flatness-based control of the induction motor with the use of Extended Kalman Filtering in case of tracking a constant setpoint (a) rotor's angle θ (b) rotor's speed ω

Flatness-based control of the induction motor with the use of Extended Kalman Filtering in case of tracking a constant setpoint (a) stator's current
7.4. Flatness-based control and Extended Kalman Filter for the induction motor
The approach on flatness-based control of the induction motor that was presented in Section 4 needs knowledge of the electric motor's state vector

The proposed flatness-based control scheme with the use of Extended Kalman Filtering for estimation of the non-measurable parameters of the motor's state vector is depicted in Fig. 16.
To implement the Extended Kalman Filter in the induction motor's model that is expressed in the


Simulation results on flatness-based control of the induction motor when using the Extended Kalman Filter for reconstructing its state vector from output measurements are presented in Fig. 17 to Fig. 22. The real state variable is denoted by the dashed blue line, the estimated state variable is denoted by the dashed green line, while the associated reference setpoint is denoted by the continuous red line. It can be observed that, although using a reduced number of sensors, the proposed state estimation-based control scheme for the induction motor provides accurate tracking of the reference setpoints. Taking into account that several variables of the induction motor state vector (e.g. rotation speed and magnetic flux) are not directly measurable (due to sensors cost and limited reliability, sensors failures and difficulties in sensors installation) the significance of state estimation through Kalman Filtering becomes clear. It can be noticed that the Extended Kalman Filter is an efficient approach for the implementation of state estimation-based control of the sixth-order induction motor model. The Unscented Kalman Filter can be also used in place of the Extended Kalman Filter and in the latter case there will be no need to compute Jacobian matrices.
Remark 1: DC motor control is performed using as control input the armature current or the field voltage. Field oriented induction motor control assumes transformation of the induction motor model from the

Flatness-based control of the induction motor with the use of Extended Kalman Filtering in case of tracking a sinusoidal setpoint (a) rotor's angle θ (b) rotor's speed ω
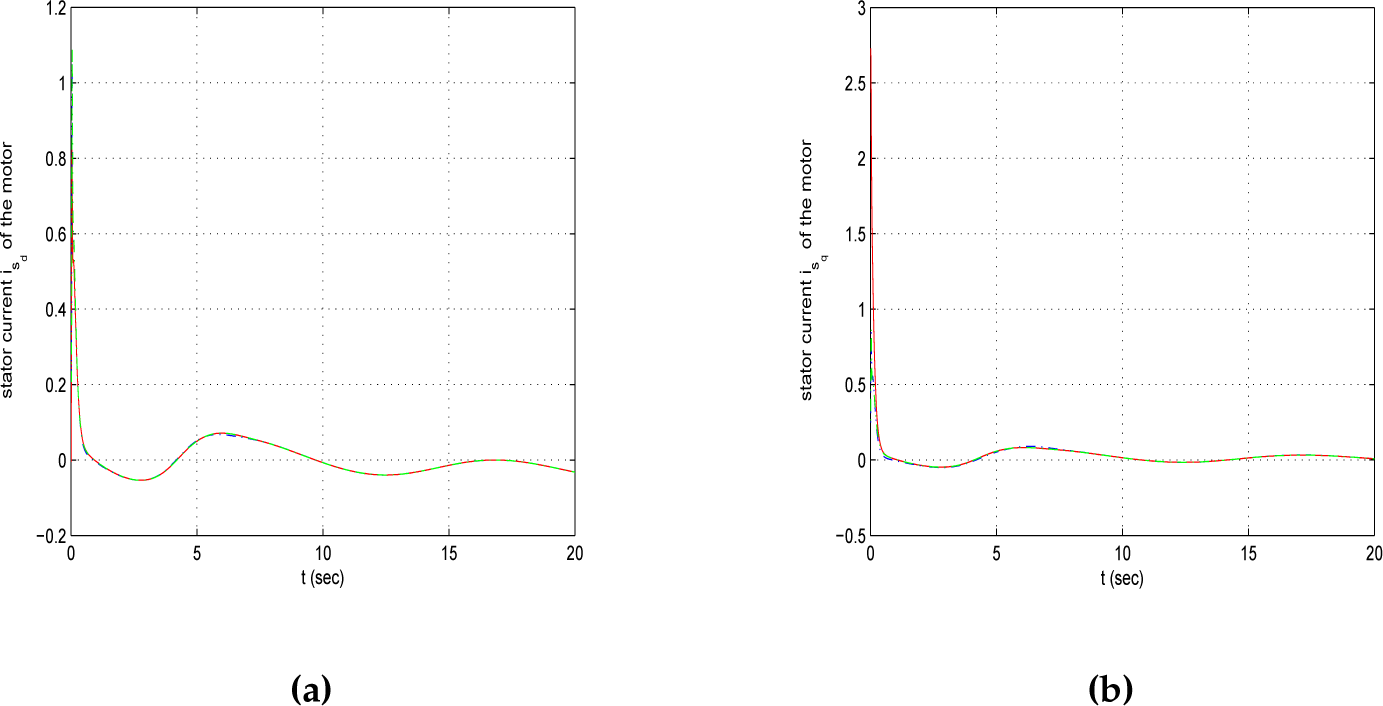
Flatness-based control of the induction motor with the use of Extended Kalman Filtering in case of tracking a sinusoidal setpoint (a) stator's current
Remark 2: To compensate for external disturbances and parameter variations in state estimation-based nonlinear control schemes the following approaches are possible (i) use of adaptive Kalman Filter, (ii) redesign of the Kalman filter in the form of a disturbance observer, (iii) redesign of the Kalman Filter in the form of a high-gain Extended Kalman Filter. Regarding (i), adaptive Kalman Filtering is implemented through the adaptation of the process and measurement noise covariance matrices in the Kalman Filter recursion so as to cope with variable noise levels (Alonge Ippolito 2010). Regarding (ii), additive disturbances and parametric changes can be identified with the use of Kalman Filters that operate as disturbance observers (see work on Kalman Filtering and disturbance observers in (Rigatos 2011)). Once the disturbance affecting the nonlinear system becomes known it can be compensated through the introduction of an additional control term in the loop. Thus, it can be assured again that the estimation error
8. Conclusions
The paper has studied sensorless control, for DC and induction motors, using Kalman Filtering techniques. First the case of a DC motor was considered. The Kalman Filter was proposed for estimating the state vector of the electric motor and Kalman Filter-based control was implemented. Next the nonlinear model of a field-oriented induction motor was considered. The motor's angular velocity was estimated by an Extended Kalman Filter which used rotor angle measurements, and sensorless control of the induction motor was again implemented through feedback of the estimated state vector. Moreover, a state estimation-based control loop was implemented, using the Unscented Kalman Filter to estimate the induction motor's state vector. Finally, state estimation-based control was developed for the complete (sixth-order) dynamical model of the induction motor using a nonlinear flatness-based controller and the state estimation provided by the Extended Kalman Filter. Unlike field-oriented control, in the latter approach there is no assumption about decoupling between the rotor's speed dynamics and the magnetic flux dynamics. The efficiency of the aforementioned Kalman Filter-based control schemes, for both the DC and the induction motor models, was tested through simulation experiments.
The paper has shown that in the design of state estimation-based control for electric motors the following should be taken into account: (i) for linear electric motor models subject to Gaussian measurement or process noise the Kalman Filter is the optimal state estimator, since it results in minimization of the trace of the estimation error's covariance matrix, (ii) for nonlinear electric motor models, subject to Gaussian noise one can use the generalization of the Kalman Filter as formulated in terms of the Extended Kalman Filter. The EKF appears to be an efficient estimator for the implementation of state estimation-based control schemes. (iii) to overcome certain limitations of the EKF (such as the need to compute Jacobian matrices and the cumulative linearization errors due to approximative linearization of the motor dynamics), Sigma Point Kalman Filters (SPKF), and particularly the Unscented Kalman Filter (UKF) can be used.
The Kalman Filtering approaches examined in this paper have shown that it is possible to reduce the number of sensors involved in the control loops of electric motors and to implement efficient state estimation-based control. Kalman Filter-based control for DC and induction motors can have several applications for the design of industrial and robotic systems of improved performance.