
Abstract
The optimum neural network combined with sliding mode control (ONNSMC) introduces the approach as a means of developing a strong controller for a robot system with two links. Sliding mode control is a strong control method that has found widespread use in a variety of disciplines and recognized for its efficiency and easy tuning to solve a wide variety of control issues using nonlinear dynamics. Nevertheless, the uncertainties in complex nonlinear systems are huge, the higher switching gain leads to an increase of the chattering amplitude. To mitigate this gain, a neural network (NN) is utilized to predict the uncertain sections of the system plant with on-line training using the backpropagation (BP) technique. The learning rate is a hyperparameter of BP algorithm which has an important effect on the results. This parameter controls how much the weights of the network are updated during each training iteration. Typically, the learning rate is set to a value ranging from 0.1 to 1. In this study, the Ant Colony Optimization (ACO) algorithm is employed with the objective of enhancing the network’s convergence speed. Specifically, the ACO algorithm is utilized to optimize this parameter and enable global search capabilities. In order to reduce the response time caused by the online training, the obtained output and input weights are updated using the adaptive laws derived from the Lyapunov stability approach, while simulations are conducted to evaluate its performance. The control action employed in the approach is observed to exhibit smooth and continuous behavior, without any signs of chattering.
Introduction
The design of motion control for robot manipulators has gained significant interest due to its challenging nature, which makes the control strategy very difficult. Accurate estimation of dynamic parameters is crucial for the system, but it is difficult to obtain exact dynamic models due to significant uncertainties, such as payload parameters, internal friction, and external disturbances, which are present in the nominal model of the system. To address uncertainties in parameters, multiple methods have been suggested. These include neural network-based controls [2,7,9,12,16,25], neural adaptive proportional-integral-derivative (PID) control [13], fuzzy PID controller [21], PID controller tuned using the Whale optimizer algorithm [10], Ant Colony Optimization (ACO) controller [1], Nonlinear Model Predictive Control tuned with neural networks [14], as well as the Sliding Mode Control (SMC) [17–20], the adaptive sliding mode disturbance observer based robust control [22] and the fuzzy SMC [23].
These robot models are highly nonlinear which makes the control strategy very difficult. Several approaches to control manipulator robots are proposed in the literature. Guechi et al. [6] developed a model predictive control MPC combined with the linear quadratic LQ optimal control. Zanchettin, Rocco and Motion [24] proposed a robust control approach with constraints for an industrial robot manipulator.
The approach known as SMC is highly significant when dealing with systems that possess uncertainties, nonlinearities, and bounded external disturbance. Nonetheless, the control effort may experience unpleasant chattering, and it is necessary to establish bounds on the uncertainties when designing the SMC. The use of boundary layer solutions is a well-known method to eliminate chattering problems in control systems, as described in previous research [18,19]. However, this approach only works effectively for systems with small uncertainties. For systems with large uncertainties, a neural network structure can be employed to estimate the unknown parts of the two-link robot model. As a result, system uncertainties are kept to a minimum, allowing for a lower switching gain to be employed. The backpropagation algorithm (BP) is used to train the neural network weights in real time, as explained in previous research [5,11]. The proposed control method involves incorporating the predicted equivalent control with the robust control term, and the estimated function from the neural network is integrated into the equivalent control component. The learning rate is an important parameter of the BP algorithm, with a recommended value between 0.1 and 1, according to previous research [5,11]. However, choosing a learning rate that is too small or too large can hinder convergence. To address this issue, we utilize the ACO algorithm [3,4], which has global search capabilities, to optimize the learning rate and improve training speed.
This paper is structured as follows: Section 2 details the proposed optimal neural network sliding mode control, while Section 3 presents the results of simulation that prove the proposed approach’s robust control performance. Finally, Section 4 provides concluding remarks.
Optimal neural network sliding mode control design
Controller design
The state space formulation of the dynamic model of the two-link robot is given by [11]:
The control law for the robot manipulator is presented in [11] as follows:
Besides
The selection of β must satisfy the following Hurwitz polynomial:
The system’s output tracking error can be described as:
Neural network representation
This article focuses on a neural network that consists of two layers of adjustable weights. The state input variables are denoted as
The connectivity weights between the hidden and output layers, as well as between the input and hidden layers, are specified as:
During the online implementation, the neural network’s weights are changed using the gradient descent method (GD), which involves iteratively adjusting the weights to minimize the error function (E). To begin, the GD approach computes the partial derivative of the error function with respect to each weight in the network. This derivative represents the direction in which the error function increases most rapidly. Therefore, the weights are updated in the opposite direction of the partial derivative in order to minimize the error function. The size of the weight update is determined by a learning rate parameter, which is chosen such that the weight update is not too large, in order to avoid overshooting the minimum of the error function, but not too small, in order to avoid slow convergence. The gradient descent method is a popular optimization technique that is widely used in neural network training as follows:
Implementation of adaptive laws
The network weights are adjusted using the hybrid BP algorithm which takes important time to have a result, to deal with this time response weights are adjusted offline. In this case the output of ANN with 5 hidden nodes can be presented by:
The parameters
The parameters
Suppose the nonlinear system described by (
1
). If the adaptive neural control rule mentioned in (
2
) is used with the parameter adaptation laws (
12
), as a result, the tracking errors converge to zero as
Take into consideration the possible lyapunov function, which is:
The Lyapunov function’s derivative is stated as:
Using equation (6), we have:
P is symmetric, we get:
Hence
The utilization of projection algorithm has a good performance on the tracking trajectory and also in the control law illustrated in the next section.
Dorigo invented ACO, which is based on actual ant behavior [3,4]. ACO operates on the principle that, as a collective, ants are capable of finding the most efficient path to their destination through simple communication methods. In the case of real ants, pheromones serve as the communication medium, with ants leaving a trail marker on the ground. Pheromones gradually evaporate over time, unless additional amounts are deposited, indicating that a greater number of ants prefer this path. As a result, the trail with the greatest pheromone levels is considered to be the most optimized path. ACO is typically applied to solve the Traveling Salesman Problem (TSP) and its fundamental concept is as follows: when an ant moves through an edge, it releases pheromone on that edge. The amount of pheromone is proportional to the edge’s shortness. The pheromone attracts other ants to follow the same edge. Eventually, all ants choose a unique path, which is the shortest possible path. The ACO methodology is presented in the following manner:
Step 1(initialization): Randomly place M ants in M cities, and set a maximum number of iterations beforehand. Step 2 (while Step 2.1: Each ant chooses its next city based on the transition probability. The probability of transitioning from the Step 2.2: Once all ants have completed their tours, the pheromone values are updated using equation (6) as shown below: Step 2.3: Increase the current iteration number Step3: Terminate the process and choose the shortest path among the routes taken by the ants as the output.
Simulation results
This section of the paper presents the experimental evaluation of the proposed control approach on a two-link robot, which is modelled according to equation (1). The primary goal of this control approach is to ensure that the system accurately follows the desired angle trajectory:
The masses are assumed to be
The coefficients of the switching functions are given by:
The optimal value of the learning rate
that leads to the best global performance
The optimal value of the learning rate
This paper utilizes a population of 40 ants as shown in Table 1.
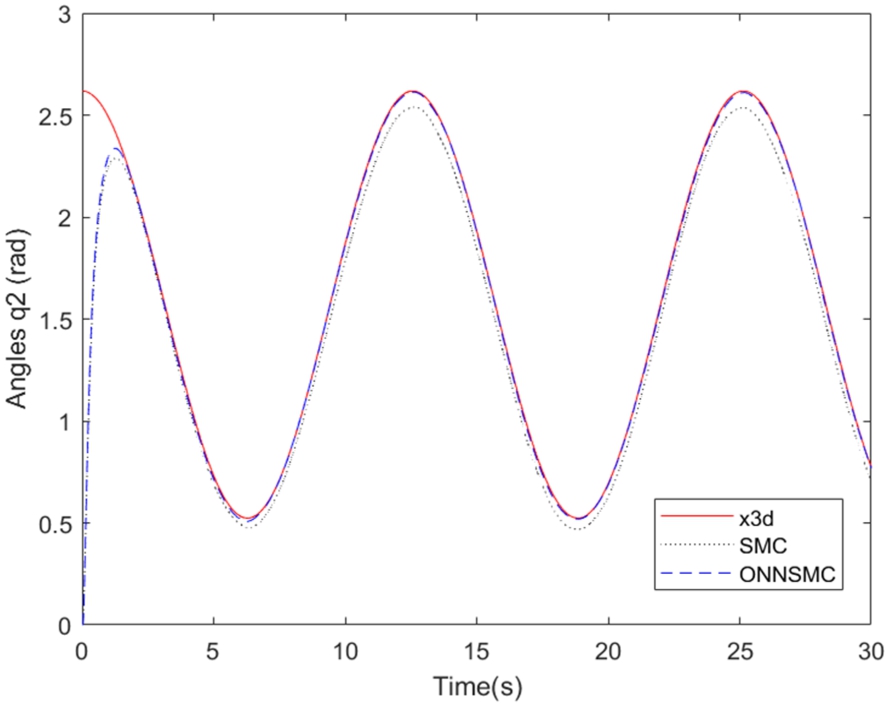
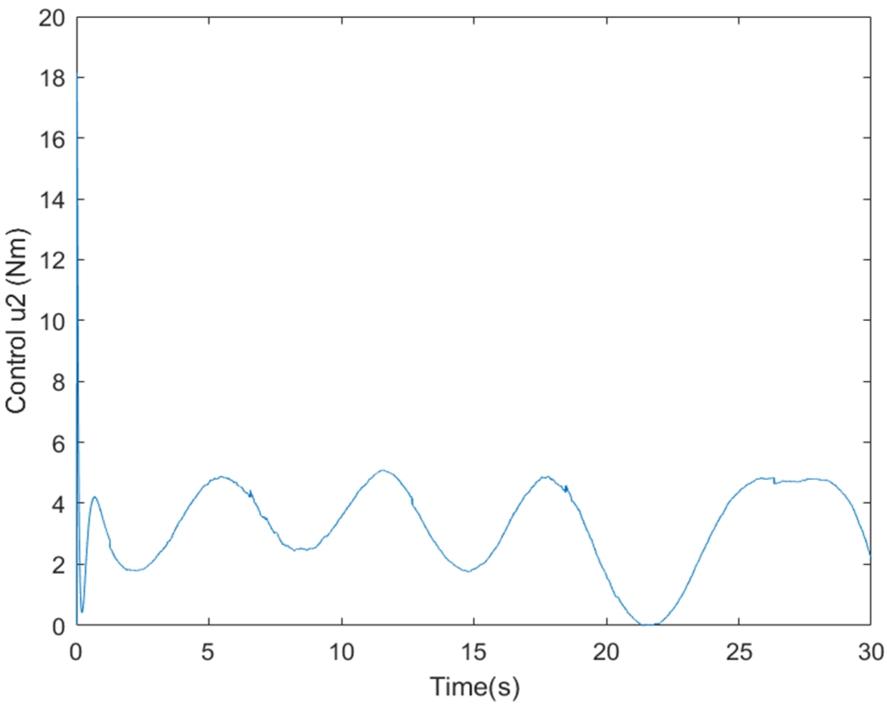
By examining Figs. 1, it can be observed that the position tracking for links 1 represented by dashed line (blue) using the control approach proposed ONNSMC follows perfectly the desired trajectory represented by solid line (red), however, the gap between the position tracking using SMC represented by dot line (black) and the desired trajectory is very significant. Besides, the Figs. 2 represent the control torque signals of the links 1, and it is smooth without any oscillation behaviours even when there are significant uncertainties. In Figs. 3, We can see that the ONNSMC position of link 2 matches closely the reference signals and quickly, however the SMC result position converge to the desired trajectory with meaningful distance. Moreover, Figs. 4 demonstrate that the control torque signals of link 2 is smooth and do not exhibit any oscillatory behavior too.
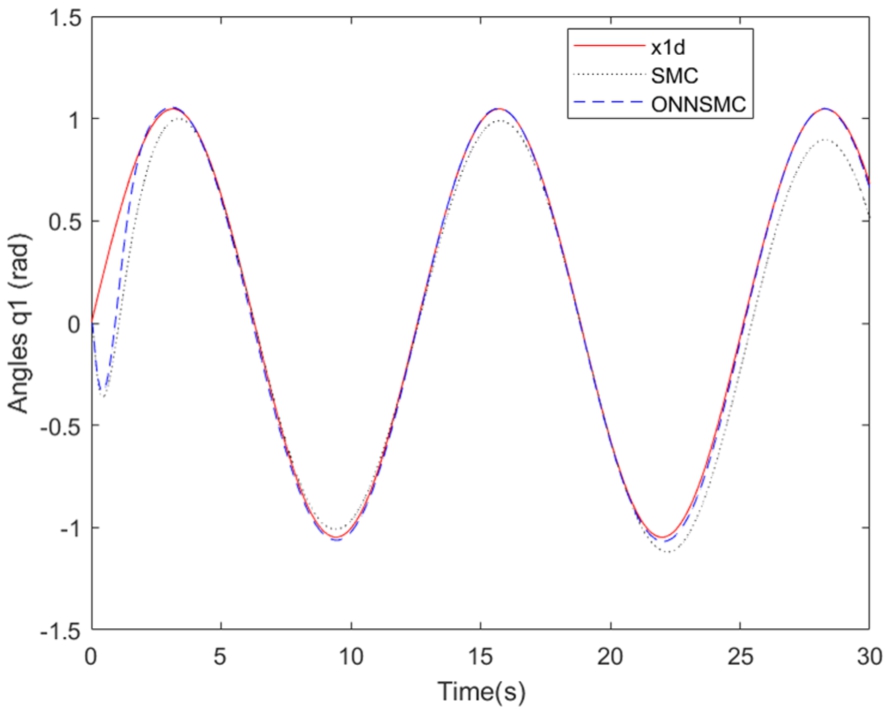
Angles responses
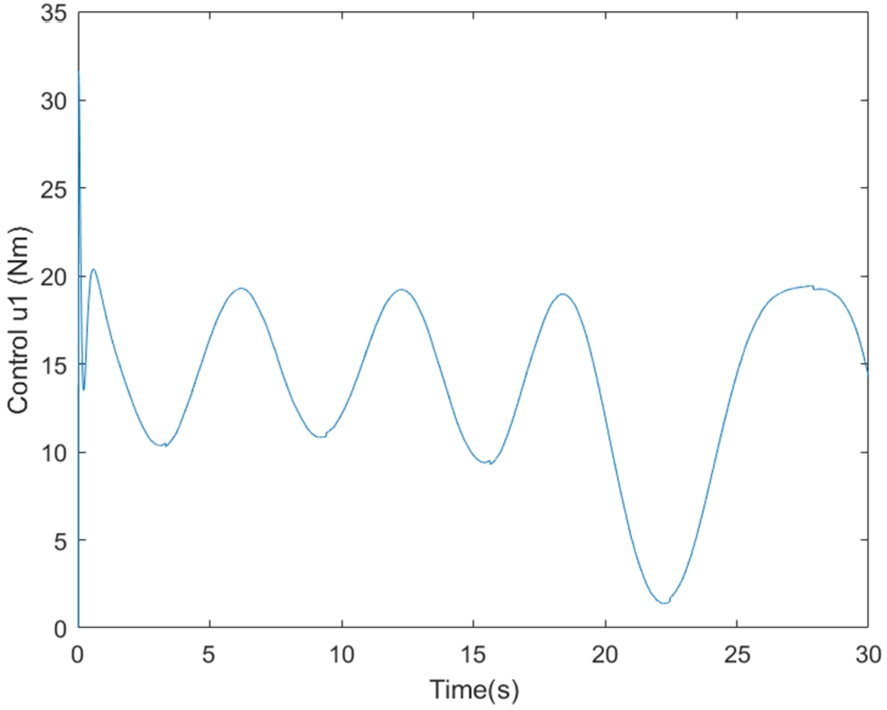
The control torque signals
This research paper proposes a novel method for robust optimal reference tracking in two-link robot manipulators by combining traditional sliding mode control with neural networks. Utilizing the neural network involves making an estimation of the nonlinear model function that is not known, and its parameters are adapted through the online BP learning algorithm to provide a better description of the plant. This allows for the use of a lower switching gain, even in the presence of large uncertainties. The ACO algorithm is used to optimize the learning rate of the BP algorithm for faster convergence. Simulation results demonstrate the effectiveness of the proposed method in tracking the reference trajectory without any oscillatory behavior. Future research may explore more efficient optimization methods for the sliding additive control gain. The speed of convergence in terms of the tracking performance is depicted in Figs 1 and 3, that represent the position tracking for link 1 and link 2. The corresponding control torque signals in Figs 2 and 4 are smooth and free of oscillatory behavior.
Angles responses
The control torque signals
Conflict of interest
None to report.