
Abstract
Motivated by achieving precise positioning of the throttle plate, an extended state observer–based intelligent double integral sliding mode control strategy is proposed for the electronic throttle control system. Specifically, an extended state observer is first designed to observe the opening angle change of the electronic throttle and compensate unexpected external disturbance. On this basis, an intelligent double integral sliding mode controller for electronic throttle valve is presented based on Lyapunov stability theory and sliding mode control theory, which includes stability analysis and parameter adaptation design. Finally, extensive simulations are conducted to demonstrate the superior performance of the proposed method.
Keywords
Introduction
In past decades, a variety of electronic throttle (ET) control methods, which have great significance on drivability of automobiles and help reduce fuel emissions, have been proposed. Deur et al. 1 proposed an refined proportional–integral–derivative (PID) control approach for the ET valve considering compensation of friction and limp-home effects. However, the guidance rules of how to choose parameters of the compensator were not given. Based on the aforementioned work, Yuan and Wang 2 put forward a neural network–based PID controller, realizing precision control of the ET valve with adaptive updating of the PID parameters. However, the effect of the torque of the return spring is ignored. Subsequently, Sheng and Bao 3 carried out a fractional-order fuzzy-PID control scheme, wherein optimal control parameters are found through the fruit fly optimization algorithm (FOA). Yet, the gear backlash was ignored in this approach, degrading the control performance. Furthermore, Panzani et al. 4 designed an ET controller including linear part and hybrid feedforward–feedback friction compensator to address the control of ET body for ride-by-wire application in sport motorcycles.
On the basis of the nonlinear control, considering that the angular velocity of ET is not measurable, Pan et al. 5 investigated variable structure control based on a sliding mode observer to estimate the angular velocity. However, it only considered the friction torque caused by Coulomb friction, while the stick-slip friction was ignored. Lately, Hu and colleagues6,7 proposed a reduced-order observer-based backstepping controller for ET, where a guideline for selection of control parameters was given through the input-to-state stability (ISS) analysis. Unfortunately, though the disturbance was taken into account to show the ISS property, it was not handled directly in the controller design. Therefore, the disturbance would result in the performance deterioration. Recently, Li et al. 8 proposed an extended state observer (ESO)-based backstepping sliding mode control (SMC) approach for the ET valve. Especially, an ESO was designed based on the ET nonlinear model to estimate the throttle opening angle change and uncertainty of ET simultaneously and then the backstepping sliding mode controller was developed to improve the control performance. However, this method only considered the throttle opening angle error while ignoring the throttle opening change error in the feedback signals. Subsequently, Li et al. 9 put forward an ESO-based double-loop integral SMC approach for ET, considering both of these two errors as feedback signals. Numerical experiments verified the effectiveness of the proposed approach with respect to the accuracy and transient performance. Moreover, Eski and Yıldırım 10 put forward a robust adaptive neural-based fuzzy inference control system to control the speed of heavy duty vehicle, which used an ET system. Recently, Sun et al. 11 proposed a fuzzy approach for optimal robust control design of automotive ET system, where the fuzzy dynamical model of the ET system with parameter uncertainties, nonlinearities, and external disturbances were established. The results showed that this method achieved a good control performance for ET system. Wang et al. 12 proposed a robust adaptive SMC scheme for automotive ET valve to eliminate the effects of the parameter uncertainties and nonlinearities including friction, return spring limp-home, and gear backlash. The simulation and experimental results showed that the proposed method achieved a comparative performance. With respect to the discrete domain, Amini et al. 13 presented a generic robust discrete sliding mode controller (DSMC) for ET system, where a novel method was used to predict and incorporate the sampling and quantization imprecisions into the DSMC structure.
From the viewpoint of optimal control, Vašak et al.
14
formulated a constrained optimal control problem based on the piecewise affine model of the ET valve considering both the gearbox friction and the “limp-home” effect. However, this approach assumed that the model was very accurate; otherwise, it would result in obvious degrading of the performance. To address this problem, Vašak et al.
15
further presented a time-optimal control method based on model predictive control (MPC), which would make an improvement of the control performance. In addition, Kim et al.
16
put forward a dynamic programming-based optimal controller for the ET valve, wherein the optimal gear shift and throttle opening angle could be obtained, and throttle gear map which could meet the power demand of the driver was developed. However, in the context of the wear and tear of the transmission components, it could not provide enough power since the map was lack of self-learning ability. Recently, Yuan et al.17,18 presented a self-learning controller for the ET valve based on neural network, for which strong robustness was achieved. Furthermore, to handle the nonlinear hysteretic behavior of ET, Wang and Huang
19
proposed an intelligent fuzzy control approach with feedforward closed-loop structure, wherein the fuzzy membership function was elegantly tuned with a novel closed-loop backpropagation (BP) method to achieve better tracking performance. However, the feedforward controller could not compensate nonlinear hysteresis (NH) accurately as the designed fuzzy rules were too simple. Montanaro et al.
20
presented a novel discrete-time model reference adaptive control (MRAC) method to cope with the nonlinear and discontinuous dynamics of the ET, where a class of minimal control synthesis (MCS) algorithms was extended by adding an explicit discrete-time adaptive integral action and an adaptive robust term. Experimental investigation verified the effectiveness of this method. Subsequently, Vargas et al.
21
presented an output feedback control strategy for Markov jump linear systems with no mode observation, which was then applied for ET control, and the experimental results demonstrated that this approach could achieve good tracking performance. Lately, Zhang et al.
22
first modeled an ET system as a linear parameter varying (LPV) system in discrete-time domain. Then, they designed mixed constrained
From the previous analysis, the main factor restricting the performance of ET control is that the system model includes a barrage of nonlinear characteristics (i.e. stick-slip friction, gear backlash, and nonlinear spring) and external disturbances, but not all of previous studies have already taken these factors into account. Inspired by this observation, this article proposes an ESO-based intelligent double integral sliding mode controller with improved transient performance and strong robustness. In particular, an ESO is first introduced to estimate the ET angular velocity and external disturbance simultaneously. Meanwhile, an intelligent double integral sliding mode controller (IDISMC) is designed based on the Lyapunov stability theory and SMC theory, which can reject uncertainties effectively and improve the dynamic performance to guarantee the reliability and accuracy of ET. Furthermore, the BP neural network is applied for online self-adaption of control parameters to further improve the control performance. Comparative simulation results are provided to show the superior performance of the proposed approach in terms of transient performance and robustness to parameter variations.
To sum up, the proposed approach successfully merges the advantages of both traditional PID and sliding mode controllers and achieves improved performance. The main contributions are as follows:
An ESO is developed to observe the opening angle change of the ET as well as external disturbance simultaneously, which is further used to suppress the influence of disturbance.
On the basis of the ESO, an intelligent double integral sliding mode controller is carried out based on Lyapunov stability theory and SMC theory. Subsequently, the BP neural network is used to design the parameters of PID-like term of the controller to realize online self-adaption of control parameters.
As verified by simulation results, the proposed approach is robust with respect to parameter variations and external disturbance, and it achieves better transient performance compared with traditional SMC.
The organization of this article is stated as follows. Section “Mathematic model of ET” gives the system model of the ET valve. Section “ET controller design” designs the controller and the ESO. Then, comparative simulations with respect to the SMC are conducted in section “Simulations.” The conclusion is given in the final section.
Mathematic model of ET
As shown in Figure 1, the ET valve consists of a DC motor, a pinion gear, an intermediate gear, a sector gear, a valve plate, and a nonlinear spring. 5 In the light of Kirchhoff’s law, the motor winding circuit is expressed as8,9

where
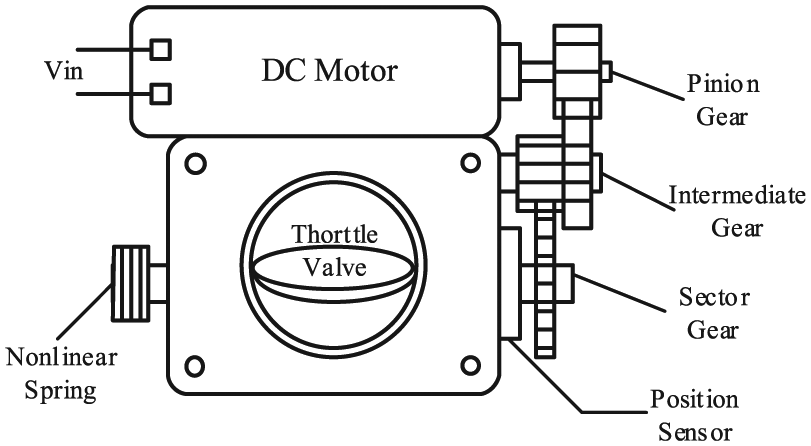
Electronic throttle valve.
According to the torque balance theory, the system model of an ET valve is given considering the ET valve drag torque caused by airflow, frictional torque, and throttle return spring torque8,9

where

where

where

where

where

The sampling period is set as

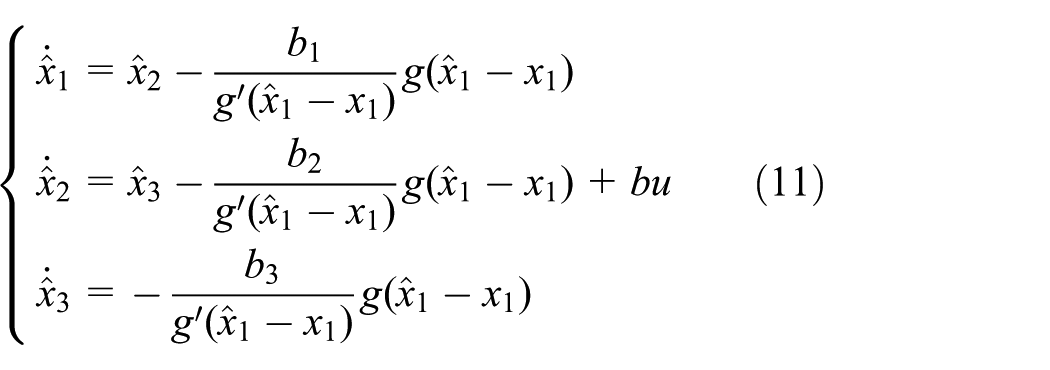
Based on equations (2)–(4), (7), and (8), the ET model can be given as

Then, let

where
In addition to the nonlinear stick-slip friction and throttle nonlinear return spring, the ET model also considers the drag torque of the ET valve caused by airflow. The control objective is to make the throttle plate track the desired trajectory more accurate without overshoot.
ET controller design
The ET valve is a complicated nonlinear system, which includes many nonlinear characteristics and immeasurable signals. Thus, in order to control ET with high accuracy, the following control strategy is given, as shown in Figure 2.

Control diagram of electronic throttle valve system.
ESO design
In the electronic-controlled throttle valve system, only the ET opening angle
The appropriate parameters
Intelligent double integral sliding mode controller (IDISMC) design
Double integral sliding mode controller
Let the desired ET angle be

And, the sliding mode surface is given as 29

where

A candidate Lyapunov function is chosen as8,9,30,31

where
Assumption
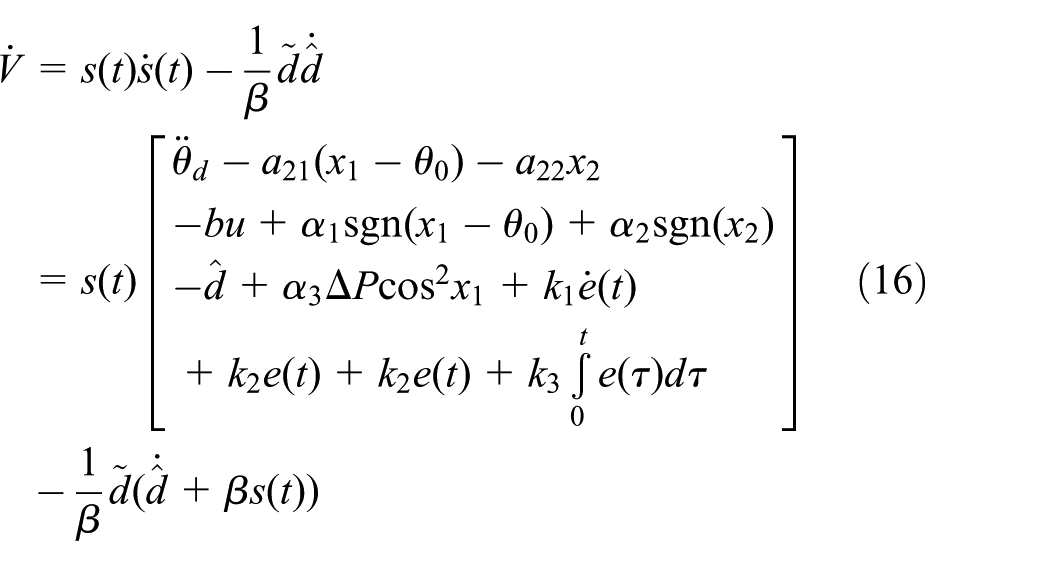
In terms of equation (16), the double integral sliding mode controller (DISMC) can be designed as

where

Submitting equations (17) and (18) into equation (16) yields

Let

By replacing the immeasurable variable

Implementation of laws for control parameters
Compared with traditional SMC, DISMC possesses good integral control characteristic to decrease the steady-state error of the closed-loop system. In addition, considering the symbol

Then

According to the classical incremental digital PID control algorithm, it is obtained that


In order to adaptively update the parameters

Neural network structure of BP.
The input of neural network is expressed as

where

where

The input and output of output layer are, respectively, described as

The nodes of the output layer denote the three adjustable parameters

Based on Figure 2, then the performance index function is chosen as

where

where
and

Since



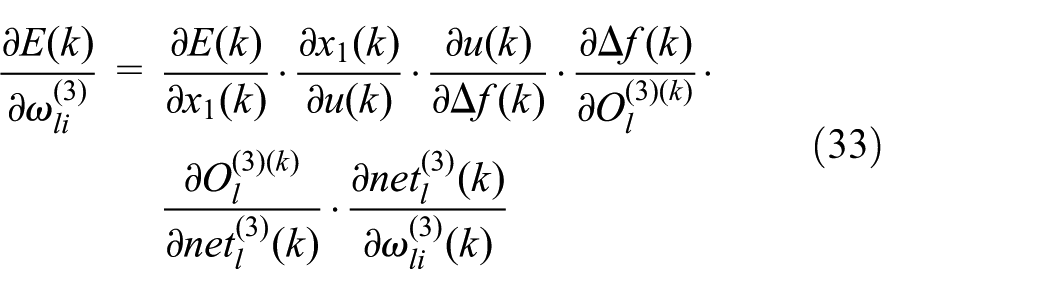
Then, the weighting coefficient learning algorithm of the output layer is derived as follows


where


where
Simulations
Three groups of simulations are presented in this section to demonstrate the superior performance of the proposed approach. In the first simulation, online parameter self-adaption and observer performance is verified; in the second simulation, the robustness of the proposed approach is verified, and finally, the controller performance for challenging square wave signals is tested in terms of dynamic performance.
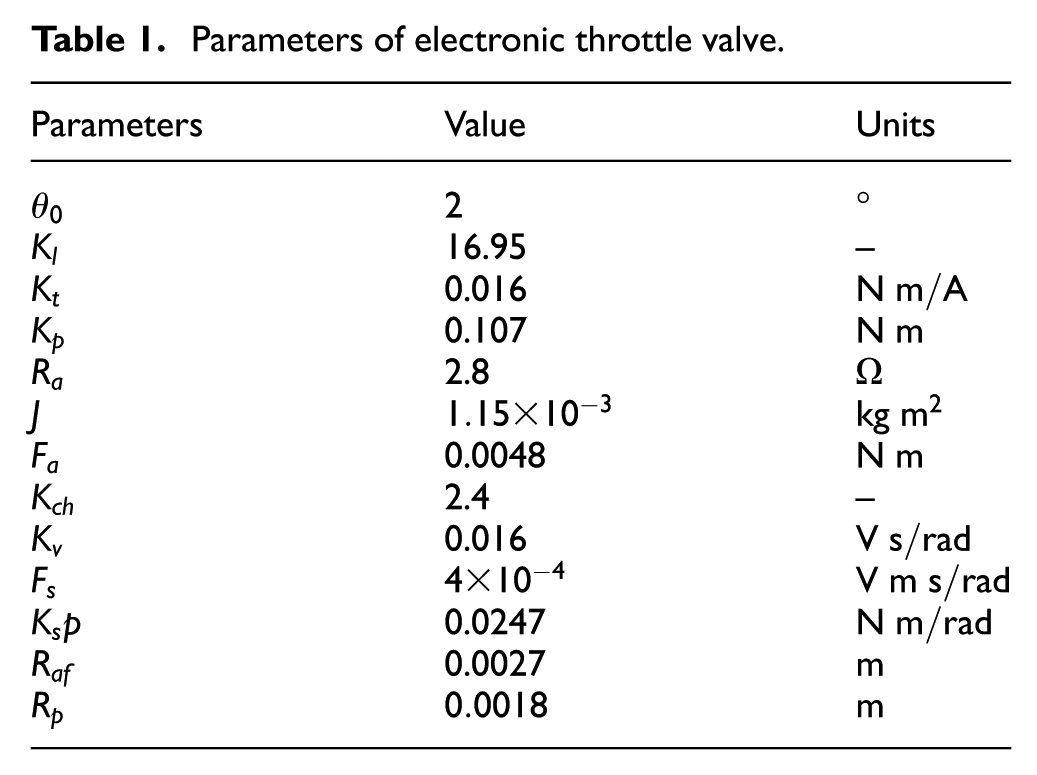
The system parameters are given as shown in Table 1.
7
The function
Parameters of electronic throttle valve.
Simulation 1: online parameter self-adaption and observer performance verification
In the article, control gains of DISMC are updated through a BP neural network. As shown in Figure 4, it can be observed that these control gains are bounded:

Online self-adaption of control parameters.
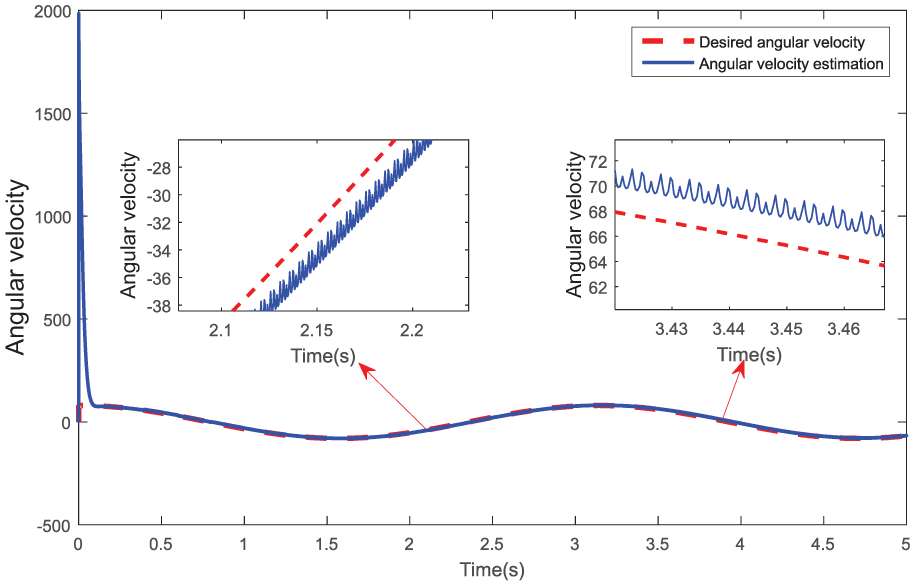
In this part, the control performance of tracking a sinusoidal reference signal has been presented in Figures 5 and 6. On one hand, from the viewpoint of the response time, as shown in Figure 5, the presented method is apparently better than SMC. On the other hand, from the viewpoint of system error, it is seen from Figure 6 that tracking errors of SMC fluctuate in the interval [−1.76, 2.56], while tracking errors of proposed controller fluctuate in the interval [−0.91, 1.32]. Obviously, the tracking errors of the proposed controller are smaller than that of SMC. Moreover, Figure 7 illustrates the estimation of the angular velocity. It can be seen from Figure 7 that the ESO is able to observe the angular velocity of the ET precisely (the absolute error is around 2 rad/s and the relative error is less than 5%). Meanwhile, Figure 8 shows the estimation of the external disturbances by the designed observer.

Sine signal tracking response.

Sine signal tracking error.
Estimation of throttle opening change.

Estimation of disturbance.
Simulation 2: controller robustness analysis
Figure 9 illustrates the step-tracking performance of IDISMC and SMC, and it can be observed that these two methods can achieve the desired throttle angle without overshot. However, from the aspect of the settling time (ST), the ST of IDISMC is 0.084 s, and the ST of SMC is 0.163 s. This means the ST of IDISMC is smaller than SMC, which indicates that the dynamic performance of the proposed controller is better than that of SMC.

Step response.
As means to validate the robustness of the proposed control scheme against parameter variations, the following cases are examined, where the system parameters are set as changing parameters so that

Step response under parameter changes.
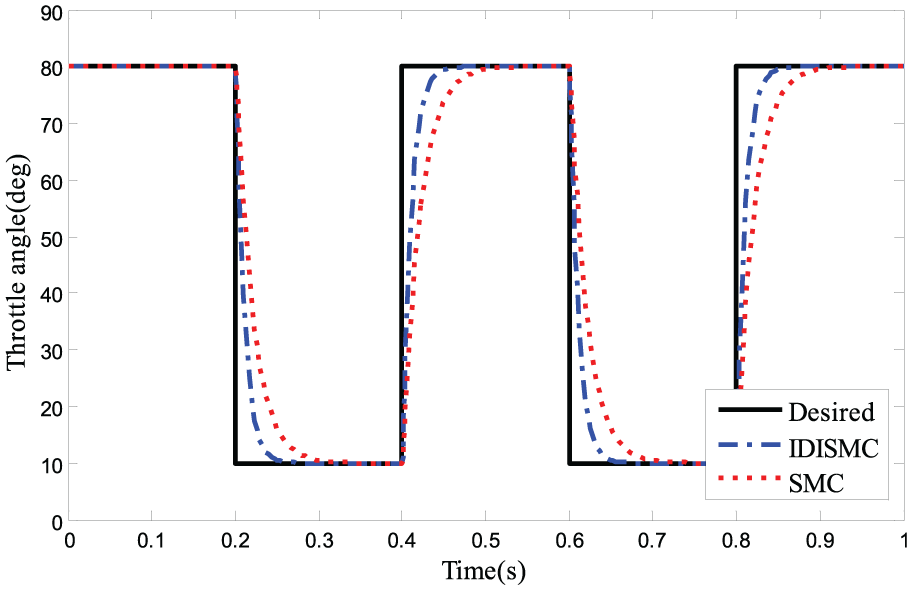
Simulation 3: controller performance for square wave signals
In this simulation, the performance of proposed control scheme is further validated in the context of square wave signals since the sudden changes of the signal from small to large opening angles or vice versa in practical applications, which are important to engine control, are possible. Moreover, there exists the phenomenon of go-and-stop in the highway when congestion happens. The vehicle speed is changing either fast or slow with the phenomenon of go-and-stop, which implies the ET valve should have the ability of making response timely with the phenomenon of go-and-stop. So, controller performance of square wave signal is discussed here. As a matter of fact, according to working range of the nonlinear spring in Hu et al.,
6
the minimum and maximum values of square wave are, respectively, set as
Square wave tracking response.

Square wave tracking error.
Conclusion
In this article, a new mathematic model of ET is proposed with consideration of the drag torque of the throttle plate. Then, an ESO-based IDISMC is carried out to improve the control accuracy of ET. First, the ESO is applied to estimate the throttle plate angular velocity and external disturbance. Meanwhile, the Lyapunov theory and sliding mode method are used to controller design. Particularly, the BP neural network is used for online self-adaption of the control parameters. Finally, the simulation is conducted. Simulation results show that (1) BP neural network has a good ability for tuning the control parameters; (2) the ESO has good performance to estimate the disturbance and the angular velocity of the throttle plate; and (3) compared with the SMC, the proposed controller has better dynamic performance and robustness with respect to different input signals and parameters variation.
Footnotes
Handling Editor: Fakher Chaari
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Open Foundation of First Level Zhejiang Key in Key Discipline of Control Science and Engineering, National Natural Science Foundation of China (grant nos 61773082 and 61573195), and by the Key Project of Basic Science and Emerging Technology of Chongqing under grant cstc2017jcyjBX0018.