
Abstract
The development of a secure battery management system (BMS) for electric vehicles depends heavily on the correct assessment of the online state-of-charge (SOC) of Li-ion batteries. The ternary lithium battery is used as the research object in this paper, and a second-order RC equivalent circuit model is developed to characterize the dynamic operating characteristics of the battery. In order to solve the problem that the adaptive unscented Kalman filter (AUKF) algorithm is easy to fail SOC estimation because the error covariance matrix is not positively definite due to the incomplete accuracy of the equivalent circuit model, a corresponding solution is proposed. Considering the poor real-time battery SOC estimate caused by the battery model’s fixed parameters, therefore we propose the Variable Forgetting Factor Recursive Least Squares (VFFRLS) algorithm for joint estimation of Li-battery SOC and the Singular Value Decomposition-AUKF (SVD-AUKF) algorithm. The SVD-AUKF algorithm can accurately estimate the SOC of the battery when the error covariance is negative. The algorithm can be adaptively adjusted in both the parameter identification and SOC estimation stages, which can effectively solve the problem of poor estimation accuracy caused by fixed parameters. According to experiments, under two separate dynamic operating situations, the joint estimation algorithm’s error is less than 2%, and its stability has also been greatly enhanced. At the same time, when the initial SOC value is set incorrectly, the convergence time of the algorithm proposed in this paper can reach within 2.1 seconds for BBDST and DST conditions, which can be well adapted to complex working conditions.
Keywords
Introduction
Electric vehicles have the advantages of energy saving, emission reduction, environmental protection, and easy maintenance, and have become the main development direction of the world automotive industry. At the same time, the lithium-ion [1–3] battery has the advantages of high energy density, no memory effect, high output power, and high overall cost performance, so it has become the optimal choice of automotive energy in the electric vehicle industry, and lithium-ion battery also performs well in environmental protection with its green advantages. With the use of lithium batteries in electric vehicles, lithium-ion batteries often operate in very complex environments [4]. There is a strict requirement for the stability and safety of the BMS [5–7] systems. This can accurately estimate the lithium battery charge state not only means the safe use of the battery to avoid overcharging and over-discharging, not only to effectively protect the battery but also to extend the battery life. The accurate estimation of SOC [8–12] depends largely on the equivalent model established for the battery characteristics, so it is important to establish a reasonable equivalent model and real-time monitoring and safety control of lithium batteries to improve the efficiency of battery use and improve the safety of battery use. The more common battery models in the application are electrochemical models, neural network models, and equivalent circuit models [13]. The SOC estimation algorithms commonly used in reality are direct measurement, data-driven, and model-based methods.
The commonly used filtering algorithms in control theory include the Extended Kalman Filter (EKF) [14–17] algorithm, which achieves linearization of the battery model by Taylor series expansion. But inevitably introduces linearization errors, but the Unscented Kalman Filter (UKF) [18–20] algorithm to estimate the battery SOC, the setting of noise covariance is difficult to reach the optimal point, and the charging state is easy to be inaccurate. However, after the adaptive algorithm is added to AUKF [21–23], the equivalent circuit model cannot completely accurately restore all characteristics of lithium-ion batteries, so the error covariance in the updating process may be negative definite, failing to charge state estimation. The application of the UKF algorithm has been widely used in recent years. For example, Zhang et al. proposed an improved UPF algorithm, which combines the advantages of the UKF algorithm and particle filter (PF) algorithm. The Remaining Useful Life [24] Prediction of lithium-ion battery has been made and good results have been obtained. At the same time, the forgotten factor is a very important parameter in the common recursive least squares (FFRLS) algorithm, which will affect the convergence rate and the sensitivity to the noise of the algorithm. The fixed forgotten factor can not adapt to the fast-changing demand of lithium-ion battery systems, which is not conducive to the accurate estimation of battery parameters. For example, Hao Wang et al. used the EKF algorithm to optimize the estimation of SOC [25]. However, after Taylor expansion, the EKF algorithm ignores the second-order and higher-order terms. Xin Lai et al. only UKF is used to estimate SOC [26], without adding an adaptive update to noise, which will affect the estimation accuracy of SOC. Qi Wang et al. mentioned that it is very meaningful to estimate SOC for lithium-ion batteries at multiple temperatures [27]. However, the equivalent circuit model is also used, which may lead to the failure of estimation due to the negative definite error covariance in the updating process.
Considering the complex working environment of electric vehicles, we address the goal of accurately describing the operating state of ternary lithium-ion batteries under complex operating conditions and establish a second-order RC [28, 29] equivalent circuit model for lithium batteries by considering the dynamic accuracy of the characterization and the accurate estimation of the battery state. At the same time, lithium-ion battery systems are nonlinear, time-varying, unstable, and uncertain, leading to the challenge of accurate estimation of SOC. For the estimation under such uncertainties and future prediction problems, Tutsoy, Onder, et al. studied the design of a model-based reduced-order filter [30] with uncertain and time-varying characteristics. It is combined with machine learning algorithms to reveal uncertainty as well as the number of failures.
To be able to accurately estimate the SOC when the sensor error is large and the error covariance is negative or large, after testing in both Beijing Bus Dynamic Stress Test (BBDST) conditions and Dynamic Stress Test (DST). Therefore, a variable forgetting factor recursive least squares (VFFRLS) [31–33] combined with an improved adaptive UKF algorithm based on SVD decomposition is proposed in this paper. And VFFRLS-SVD-AUKF [34–36] algorithm is used to estimate SOC for lithium batteries. At the same time, it can solve the problem that the error covariance can not be decomposed and the SOC estimation accuracy is low due to the fixed noise.
The contributions of this paper are summarized below. First, in the case of the second-order equivalent circuit model, a variable forgetting factor RLS algorithm was proposed to realize online parameter identification of lithium-ion battery parameters, and SVD decomposition was used to replace Cholesky’s decomposition. This will solve the problem of indecomposable error covariance negative definite which may occur in the iterative process when the equivalent circuit model cannot perfectly restore the lithium battery system. At the same time, an adaptive method is used to update the noise of the UKF algorithm.
Introduction of equivalent circuit model and parameter identification algorithm
Second-order RC equivalent circuit model
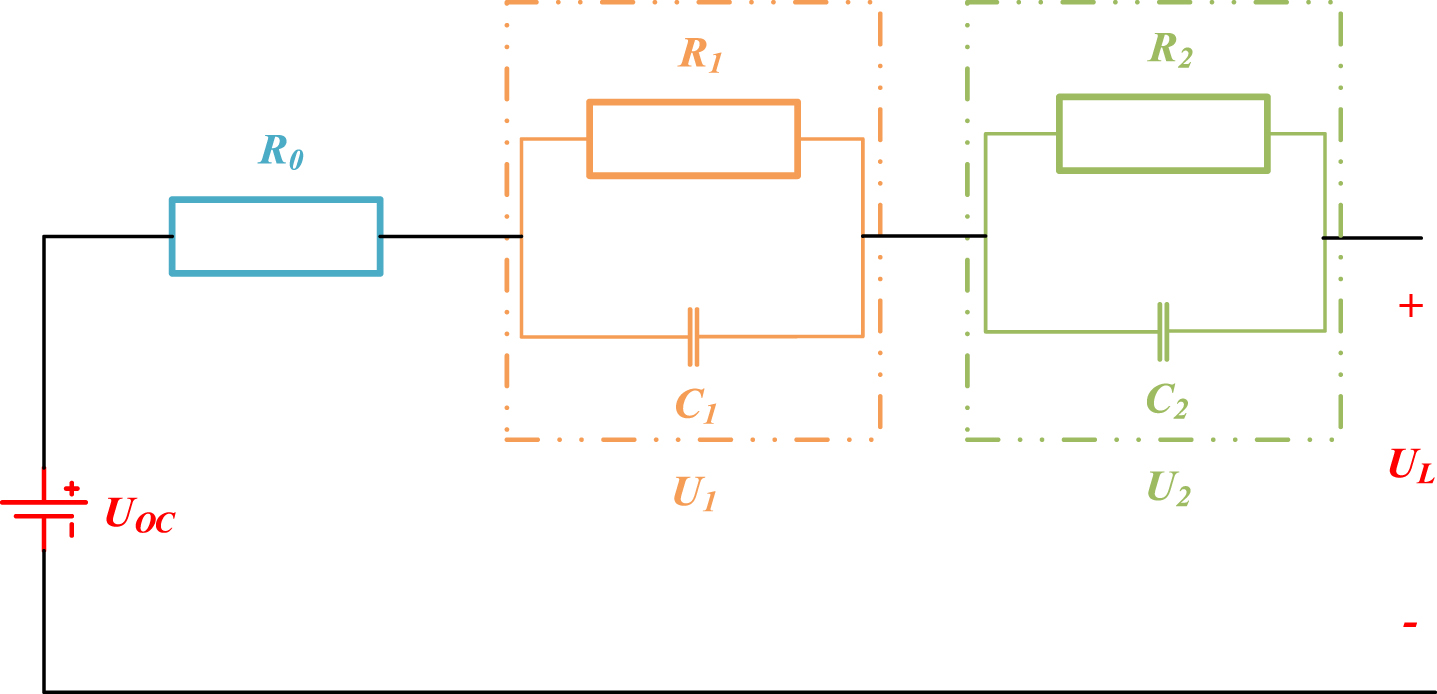
The RC equivalent circuit model is simple in structure, requires only a few parameters and low computational cost to complete the modeling, and is widely used. In this paper, the second-order RC equivalent circuit model [37, 38] is adopted. Compared with the Thevenin equivalent circuit model, the Thevenin equivalent circuit model, as a commonly used equivalent circuit model for lithium-ion batteries, has been used in many papers. for example, Zhirun Li et al. proposed A novel parameter and state-of-charge determining the method of lithium-ion battery for electric vehicles, A first-order equivalent circuit model is used to replace the lithium-ion battery. Compared with the first-order equivalent circuit model, a set of polarization capacitors and resistance were added to better simulate the working state of the battery [39] in actual operation. The structure of the second-order RC equivalent circuit model is shown in Fig. 1.
In Fig. 1, U OC represents the open circuit voltage; U L represents the terminal voltage, and R0 represents the ohmic internal resistance. The parallel links of R1 and C1 represent the electrochemical polarization process of the battery, while the parallel links of R2 and C2 represent the concentration difference polarization process of the battery. According to Kirchowski’s law, the voltage [40] and current expressions of the equivalent circuit can be obtained by analyzing the constructed second-order RC equivalent circuit model as shown in Equation (1).
Second-order RC equivalent circuit model.
Among them, the open circuit voltage can be characterized by the state variable SOC and the state space variable x
k
= [SOC
k
, U1, U2]
T
is selected, while we discretize the equivalent circuit to obtain the discrete state space expression. As shown in Equation (2).
Here Δt is the sampling interval, τ1 = R1C1τ2 = R2C2, Q N is the rated capacity of the cell; W k is the state error, V k is the measurement error, and is the zero-mean white noise of the covariance matrices Q and R, respectively, and η is the Coulomb efficiency.
Since the charging and discharging of a Li-ion battery is a dynamic process, and the equivalent circuit parameters of a Li-ion battery [41, 42] have been changing with the depth of charging and discharging during the charging and discharging process, the offline least squares identification algorithm will have a large error in practical application and will not be suitable for engineering applications, but each update of the RLS [43] algorithm data will be affected by the previous data. Therefore, for lithium-ion battery systems, the forgetting factor should be adjusted automatically with the change of dynamic characteristics. When the system parameters change quickly, a smaller forgetting factor is automatically selected to improve the identification sensitivity. When the parameters change slowly, a larger forgetting factor is automatically selected to increase the memory length and improve the identification accuracy. However, the recursive least square method accumulates a lot of old data in the process of recursive iteration, especially in the actual use of lithium battery, not only does the system’s dynamic characteristics change greatly, but also accumulates a lot of data. In this paper, we use a recursive least squares method with a variable forgetting factor [44], which is an improvement of the recursive least squares method. Not only the forgetting factor is added, but also the variable forgetting factor can make the online recognition of battery parameters more dynamic and adaptive. The Laplace equation for the Li-ion battery model is shown in Equations (5) to (6).
Using a bilinear transformation for discretization, letting
Where I
k
is the system input, y
k
is the system output, and let the sensor sampling error at moment k be v
k
, we can obtain Equation (11).
Here we extend h
k
to N dimensions, giving Equation (12), while taking the generic function J (θ) gives Equation (13).
Since the principle of least squares is to minimize J (θ), find the extreme value of J (θ) and make Equations (14) and (15).
In this paper, we introduce the forgetting factor λ (0 < λ < 1), when the RLS algorithm to add the forgetting factor will be converted into FFRLS, but the simple FFRLS can not be well adapted to the rapid change of lithium-ion battery system, so this paper improved based on FFRLS, to achieve the flexibility of λ. Improved recursive least squares algorithm for variable forgetting factors, where updates to forgetting factors are adjusted according to the squares of the autocorrelated time mean estimates of the prior and posterior errors. The improved recursive equation is shown in Equation (16).
After discretizing Equation (17), k1 to k5 are introduced instead of the actual parameters for abstract expression, as shown in Equation (19). In Equation (19), θ = (k1, k2, k3, k4, k5)
T
after obtaining the parameter vector, the actual parameters can be obtained by Equation (18), as in Equation (20).
Adaptive Unscented Kalman Filter algorithm based on SVD decomposition
In contrast to the UKF algorithm, for the nonlinear problems of lithium-ion batteries, the extended Kalman filter ignores the higher-order term and only uses the first partial derivative of the Taylor expansion of the nonlinear function. In addition, the computational burden of the Jacobian matrix must be considered in practical applications. To avoid these problems, the UKF algorithm adopts UT transform instead of linearization, to improve the accuracy to the second order [45]. It also reduces the amount of computation. The UKF is based on the Unscented Transform [46] (UT), which directly approximates the random distribution with the sample-weighted summation, avoiding the analytical derivation of the nonlinear function, and has a high accuracy of SOC estimation. On the other hand, the AUKF algorithm in this paper adds an adaptive link based on UKF. Although part of the algorithm’s simplicity is sacrificed, the accuracy and real-time performance in the estimation process are improved by updating the noise matrix. Both the UKF algorithm and AUKF algorithm handle nonlinear problems with unscented transform, but the traditional UT [47] obtained sigma points based on the Cholesky decomposition. When the error covariance is negative, the Cholesky decomposition fails to decompose the negative definite matrix, resulting in UT transformation failure and system instability. To address this problem, the AUKF algorithm of Cholesky decomposition was replaced by SVD decomposition to achieve SOC estimation in this paper. SVD decomposition is shown in Equation (21).
P is a matrix of order m × n, mn, where U is a matrix of order m × m, Λ is a semi-positive definite matrix of order m × n, G is a matrix of order n × n, where the matrix S = diag (s1, s2, s3, …, s r ) within Λ is a diagonal matrix consisting of the singular values of the matrix P and r is the rank of the matrix P.
Similarly, in using the SVD-AUKF algorithm for achieving accurate estimation of SOC, the state equation and measurement equation of the lithium battery are similar to Equation (2). Here, for easy distinction, let u
k
= I
k
, y
k
= UL,k. Then the new equation of state and measurement equation can be obtained as shown in Equation (22).
The SVD-AUKF algorithm suppressed the non-positive definite problems encountered in Cholesky decomposition. Compared with Cholesky, the complexity of SVD decomposition was higher. However, using SVD decomposition instead of Cholesky decomposition did not significantly improve the algorithm complexity. The SOC estimation of lithium battery is realized and the stability of the algorithm is greatly improved. To estimate the battery SOC, perform the following steps.
At this point, the update of Kalman gain and the update of process noise covariance and measurement noise covariance is completed. By cycling through the above steps, the cell SOC at moment k can be separated from
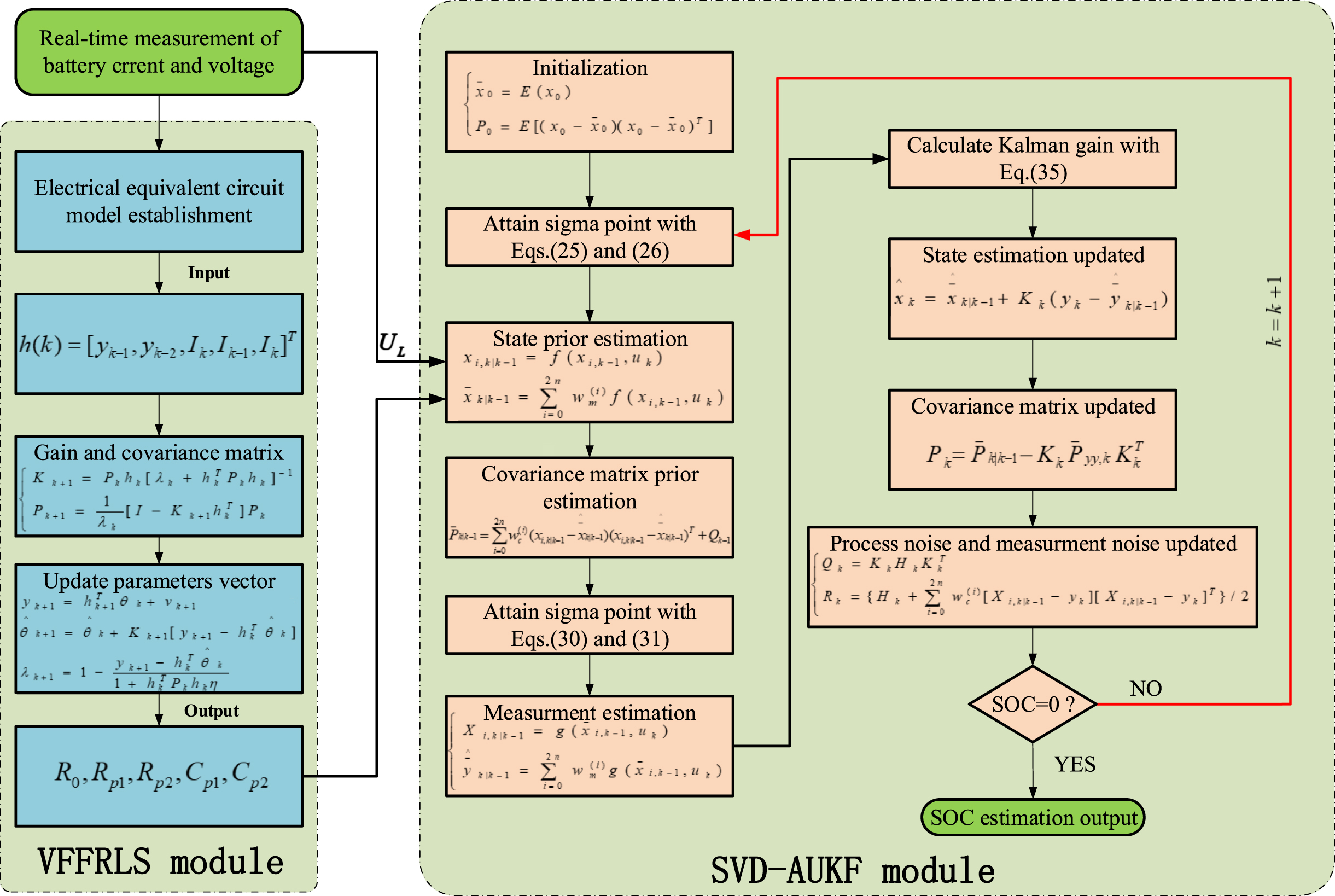
Based on the state equation and observation equation of the battery, the VFFRLS and SVD-AUKF algorithms can be combined to achieve a joint SOC estimation algorithm for Li-ion batteries based on online parameter identification and SVD-AUKF. The influence of the fixed parameters on the SOC estimation accuracy is reduced, and the flow chart of the SOC estimation algorithm for Li-ion batteries is shown in Fig. 2.
SOC estimation flow of VFFRLS-SVD-AUKF.
Experimental platform
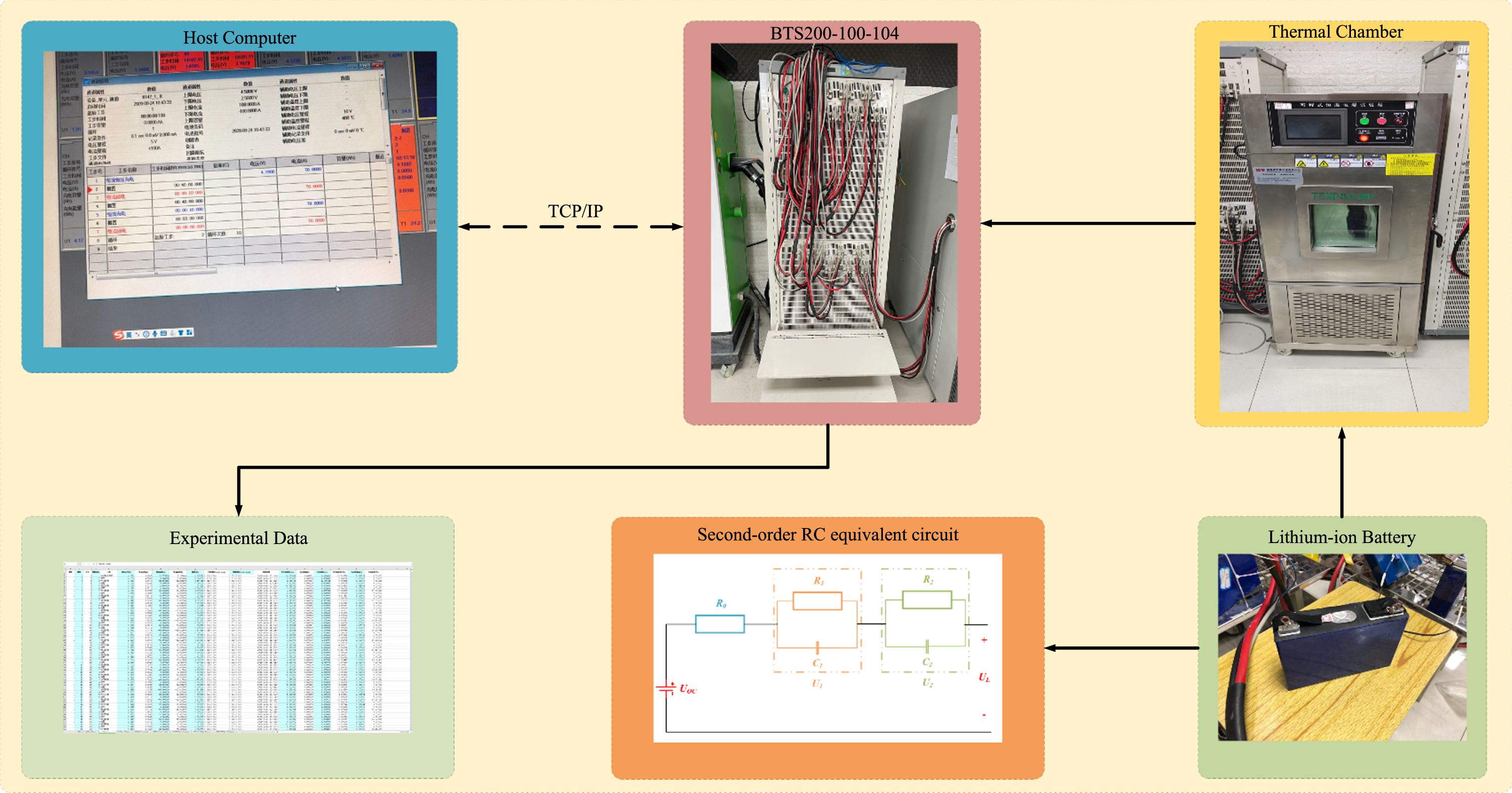
In this paper, we choose the ternary lithium battery for the test, which has a nominal capacity of 70Ah and an actual capacity of 65.3Ah. To avoid the variation of parameters in the model with temperature, the test is carried out at 25°C. The experimental platform is shown in Fig. 3.
Experimental platform.
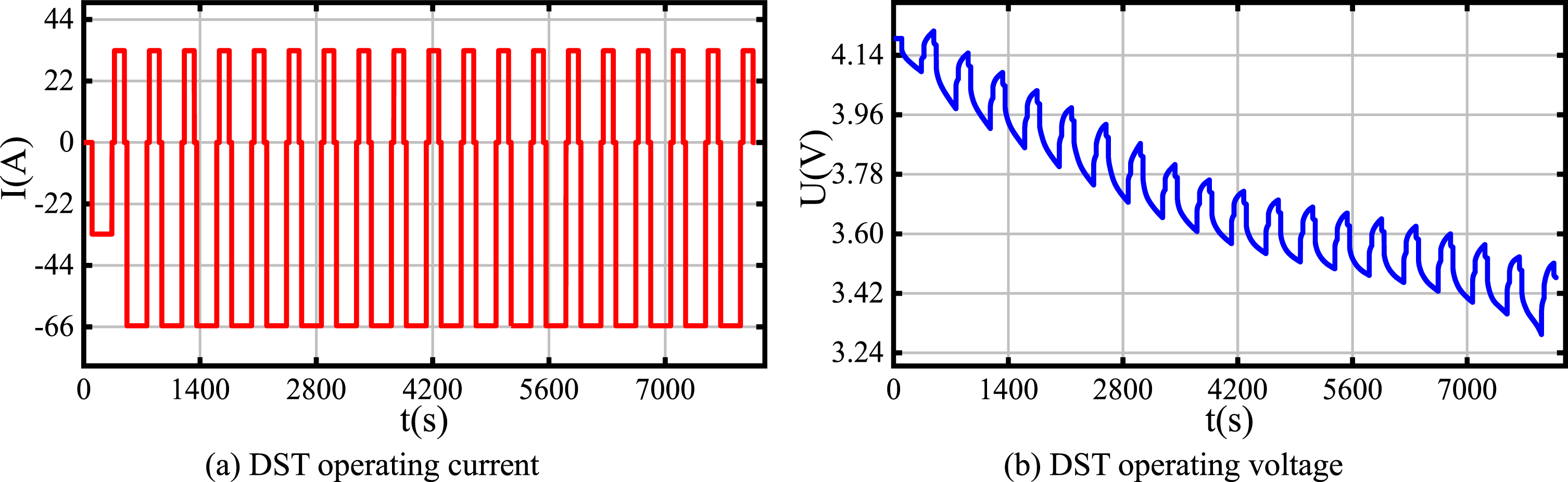
The proposed online joint algorithm based on VFFRLS and SVD-AUKF is carried out in both BBDST and DST operating conditions. the operating currents and operating voltages under BBDST and DST operating conditions are shown in Fig. 4 and Fig. 5, respectively.
DST operating current and voltage.
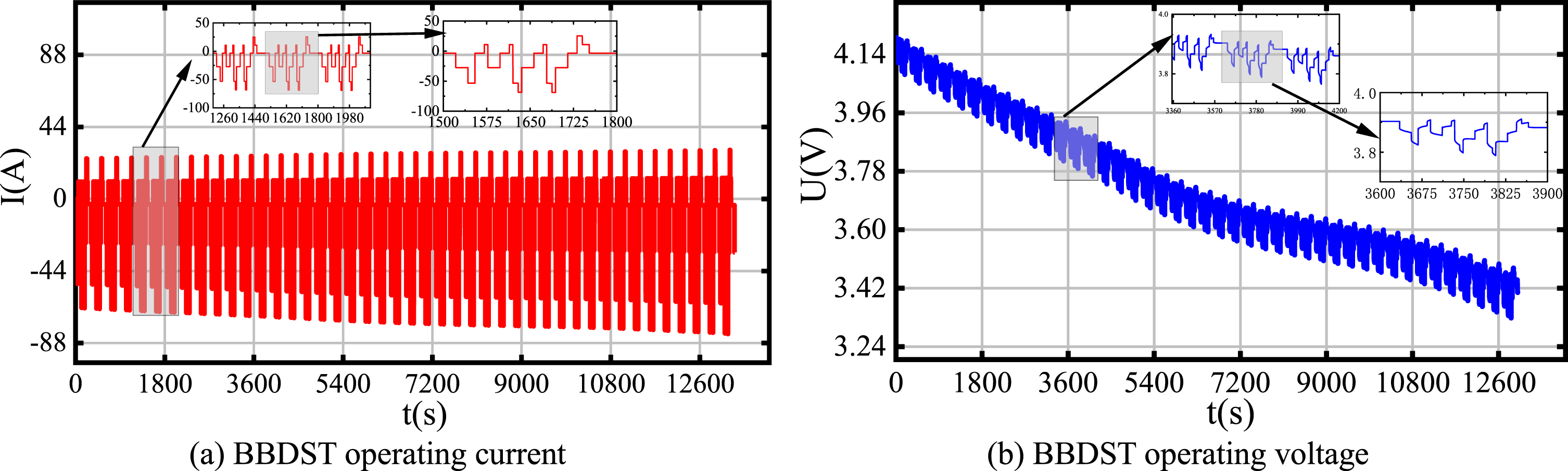
BBDST operating current and voltage.
As can be seen in the figure, the variation of operating current and voltage in both BBDST condition and DST condition is very large, which can be a good test of algorithm stability. In the following, the joint estimation of Li-ion batteries based on VFFRLS and SVD-AUKF is referred to as the online joint estimation algorithm.
For the online parameter identification with a fixed forgetting factor, the tracking ability is weak when the current and voltage vary greatly due to the limitation of the forgetting factor, while the online parameter identification with a variable forgetting factor can automatically correct the forgetting factor and the tracking ability is strong. The following is an example to compare the tracking ability of FFRLS and VFFRLS for real voltage profiles in BBDST operation. Figures 6, 7, and 8 are shown below.
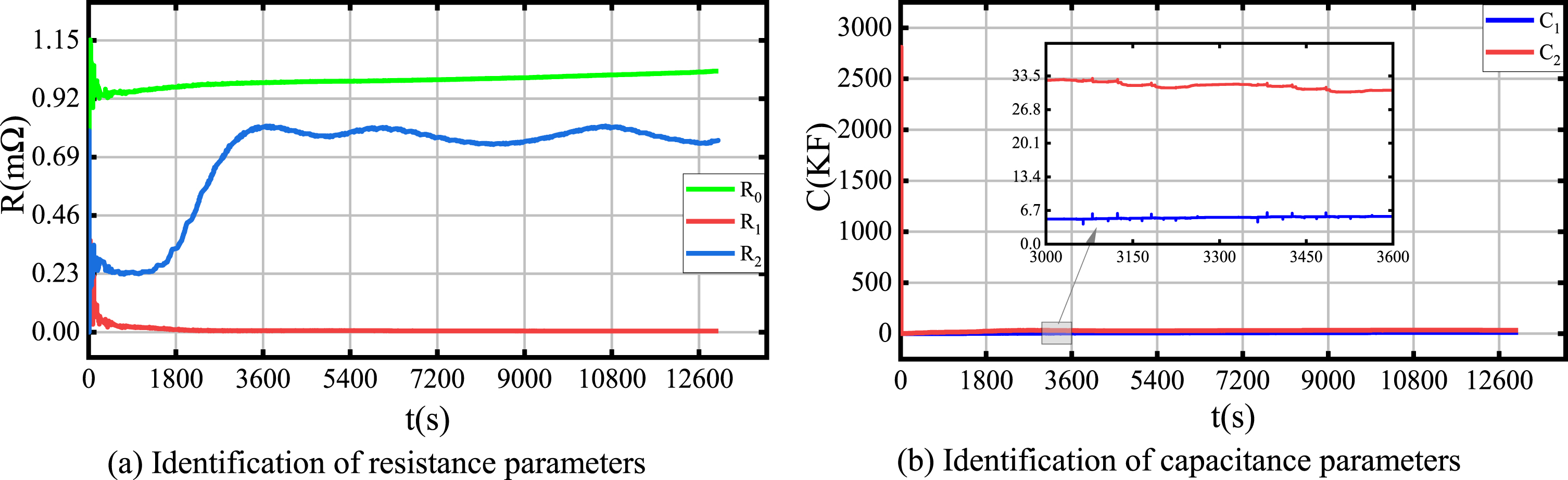
Resistance and capacitance identification results under BBDST operating conditions.
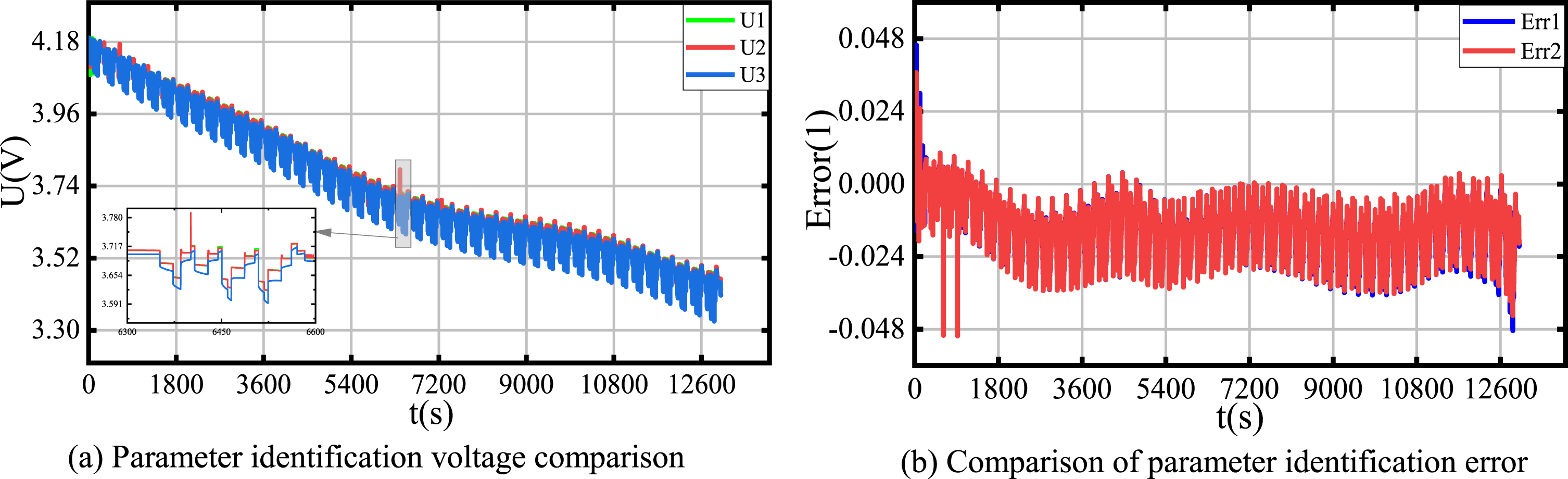
Comparison of voltage and error measurements at BBDST operating conditions when λ = 0.99.
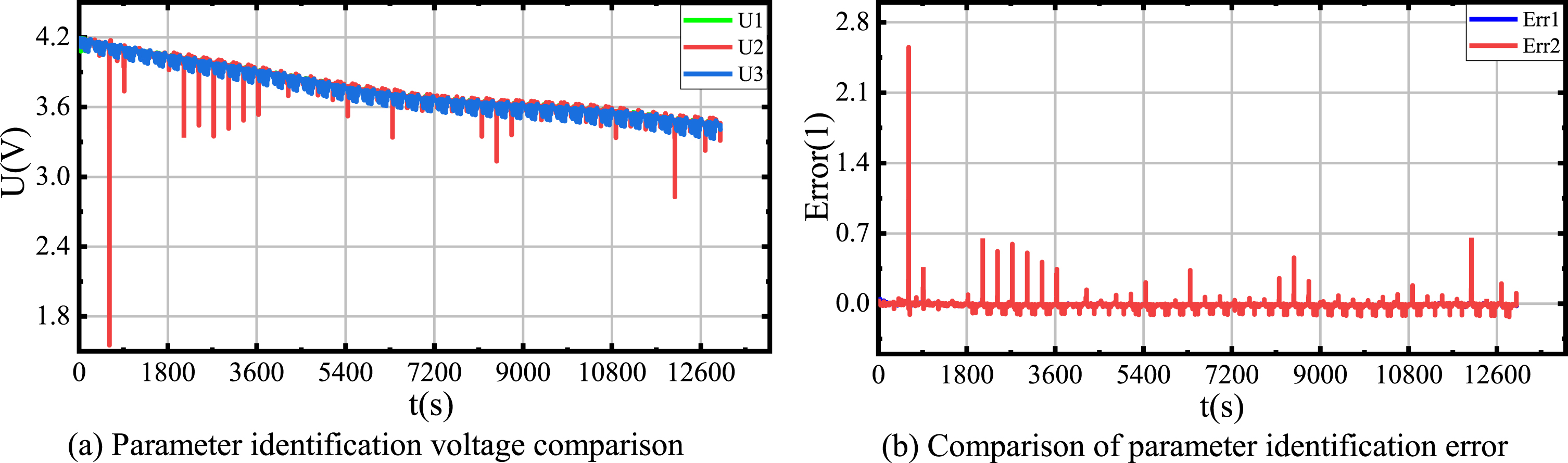
Comparison of voltage and error measurements at BBDST operating conditions when λ = 0.98.
Part (a) of Figs. 7 and 8 show us the voltage variations simulated by the two-parameter identification methods, VFFRLS and FFRLS, respectively, under BBDST conditions, where U1 represents the simulated voltage of the VFFRLS algorithm, U2 represents the simulated voltage of the FFRLS algorithm, and U3 represents the actual measured voltage, as can be seen from the pictures, at λ = 0.99, the two algorithms The errors are very close and both algorithms can simulate the actual voltage well, but at λ = 0.98 there is a significant change, the simulated voltage curve of VFFRLS still has a small error, but the simulated voltage curve of FFRLS has a significantly large fluctuation, it is clear that the change in λ has a significant impact on the ability of the FFRLS algorithm to simulate the voltage.
Part (b) of Figs. 7 and 8 show us the error when simulating the voltage in the corresponding part (a). Err1 represents the error of the VFFRLS algorithm and Err2 represents the error of the FFRLS algorithm. It is clear from the change in error in both figures that the forgetting factor has a greater impact on the FFRLS algorithm, but the VFFRLS algorithm has a limited impact on the change in the forgetting factor due to its good adaptability However, the VFFRLS algorithm has limited impact on its stability due to its good adaptability. For specific analysis, we present Table 1, which clearly shows the difference in the mean error and RMSE of the two algorithms for two different initial values of the forgetting factor.
Error analysis of parameter identification at λ = 0.99 and λ = 0.98
As can be seen in Table 1, variations in the forgetting factor have a small effect on the VFFRLS algorithm, but a large effect on the FFRLS algorithm when simulating voltages and the data in Table 1 further illustrate the dependence of the FFRLS algorithm on the selection of an appropriate forgetting factor when simulating voltages. The parameter identification results in Fig. 6 also show the feasibility of using the VFFRLS algorithm for parameter identification of Lithium-ion batteries, so the VFFRLS algorithm with better stability will be used for online parameter identification when SOC estimation of Lithium-ion batteries is performed in later papers.
In this paper, we use the joint algorithm for SOC estimation under BBDST and DST conditions, and since the performance improvement of the SVD method on the AUKF algorithm can only be seen when the covariance is negative, here we only compare the VFFRLS-SVD-AUKF algorithm with the VFFRLS-EKF [48, 49] algorithm and the VFFRLS-UKF algorithm for SOC estimation for comparison. Here we set the process noise to Q = 10-5 × E3×3 for all three algorithms, while we set the sampling noise to R = 0.02 for all three algorithms. In addition, the initial error covariance is set to P = 0.8 × E3×3 for all three algorithms. In the following, for simplicity, the VFFRLS-SVD-AUKF algorithm is referred to as the joint algorithm, the VFFRLS-UKF is referred to as the joint UKF algorithm, and the VFFRLS-EKF algorithm is referred to as the joint EKF algorithm.
Through Fig. 9 we can very obviously find that the joint UKF algorithm has a smaller error and better stability compared to the joint EKF algorithm for the SOC estimation of Li-ion battery. At 0–3000s both the joint algorithm and the joint UKF algorithm show good stability for SOC estimation compared to the joint EKF algorithm, and at the 7000–10000s stage, it can be seen that the joint algorithm is more stable than the joint UKF algorithm, which can still guarantee small errors under the drastic changes of current and voltage. In the following, we investigate the stability of the three algorithms under DST conditions by using Fig. 10.
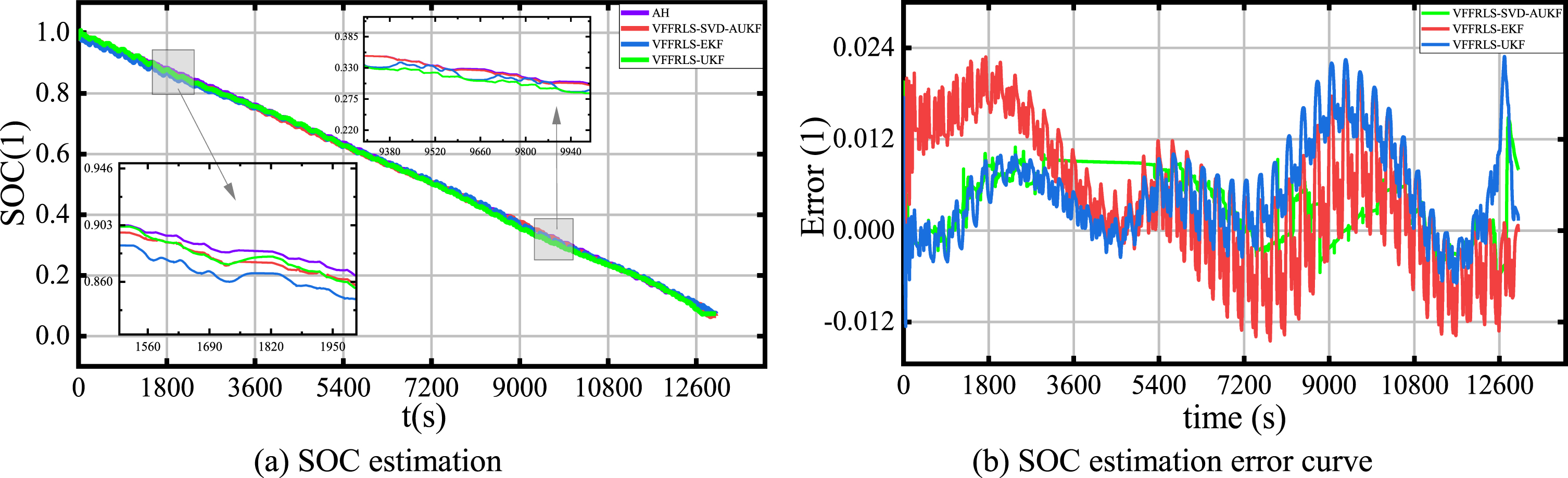
SOC estimation under BBDST working conditions and SOC estimation error curve.
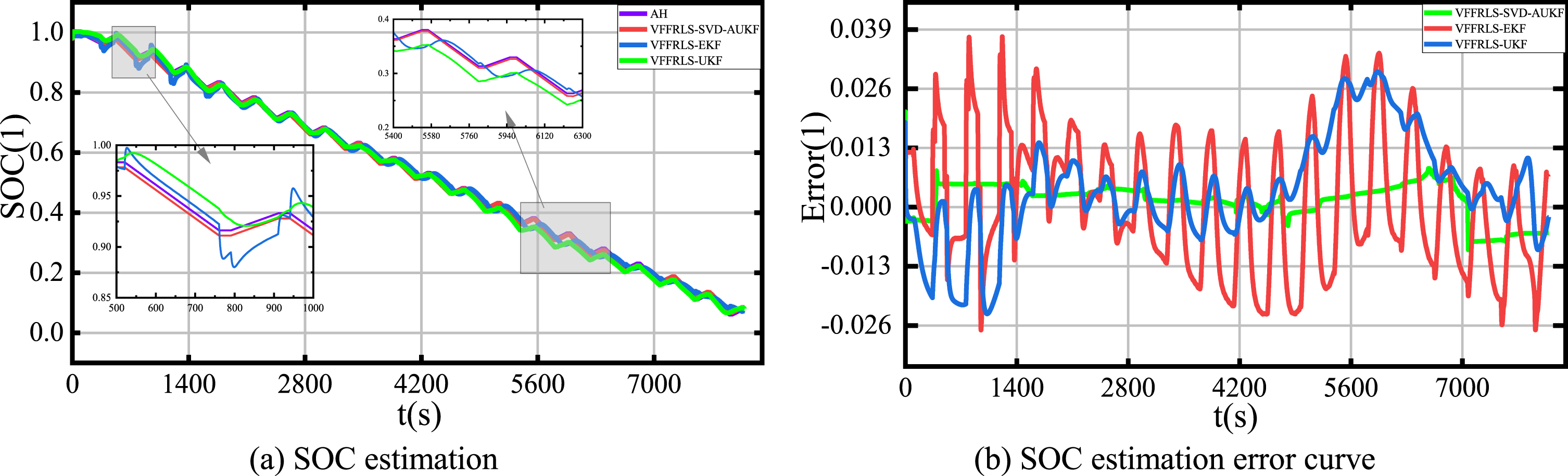
SOC estimation under DST working conditions and SOC estimation error curve.
As shown in the figure, it can be seen that the difference between the estimation error of SOC by different algorithms is more obvious under the DST condition, and it can be seen that the SOC estimation method under the joint algorithm can adapt to the rapid change of operating current voltage, and the other two estimation algorithms and the changing trend of the reference curve of SOC are the same, but it is obvious that the joint algorithm is closer to the theoretical curve, and it can be seen that the accuracy of the UKF algorithm is improved and the SVD decomposition does not have a bad effect on the estimation of SOC after improving the UKF algorithm into the SVD-AUKF algorithm.
Table 2 is the Mean Err, MAE, and RMSE obtained after SOC estimation for the VFFRLS-SVD-AUKF algorithm, VFFRLS-UKF algorithm, and VFFRLS-EKF algorithm under the BBDST and DST conditions, respectively.
Here, we selected Mean Err, MAE, and RMSE [50] as evaluation indicators, which can well reflect the accuracy and stability of SOC estimation. It can be seen from Table 2 that the Mean Err, MAE, and RMSE of SOC estimation of the combined algorithm under BBDST condition are the smallest among the three algorithms. The accuracy of the combined UKF algorithm in the RMSE and MAE index is higher than that of the combined EKF algorithm, but the Mean Err is slightly higher. It shows that the UKF algorithm needs to be improved in the long time SOC estimation. At the same time, it can be seen from TABLE 2 that in DST working conditions, the accuracy of the combined UKF algorithm is better than that of the combined EKF algorithm in all aspects. Under MAE and RMSE error assessment methods, the combined algorithm improves by 0.0128 and 0.0124, respectively, compared with the combined UKF algorithm. The results show that, under the two working conditions, The joint algorithm has good stability and tracking performance.
Comparison of Mean Err, MAE, and RMSE for BBDST and DST working condition
To verify the operational stability of the VFFRLS-SVD-AUKF algorithm in estimating the SOC of lithium batteries, we set the initial error covariance matrix of both the SVD-AUKF algorithm based on VFFRLS online parameter identification and the AUKF algorithm based on VFFRLS online parameter identification to the same negative definite matrix with an error covariance matrix of P0 = -0.1 × E3×3. The remaining parameters remain unchanged. At this point, the AUKF algorithm for online parameter identification is unable to decompose the negative definite matrix due to the Cholesky decomposition resulting in the SOC estimation not being carried out properly, but the VFFRLS-SVD-AUKF algorithm is still able to complete the accurate estimation of the SOC properly, and the estimation curve is shown in part (a) of Fig. 11. The error curves are shown in part (b) in Fig. 11.
In Fig. 11, we set the initial value of the error covariance to a negative-positive definite value, and the joint algorithm still estimates the SOC normally, with an error of 1.954% at the most obvious point of error and a maximum error of 1.485% near the end of discharge, both errors being within the 2% range. From this, we can learn that the SOC can still be estimated accurately with negative definite error covariance, which achieves the purpose of improvement and increases the accuracy of the AUKF algorithm while solving the instability problem of the UKF algorithm.
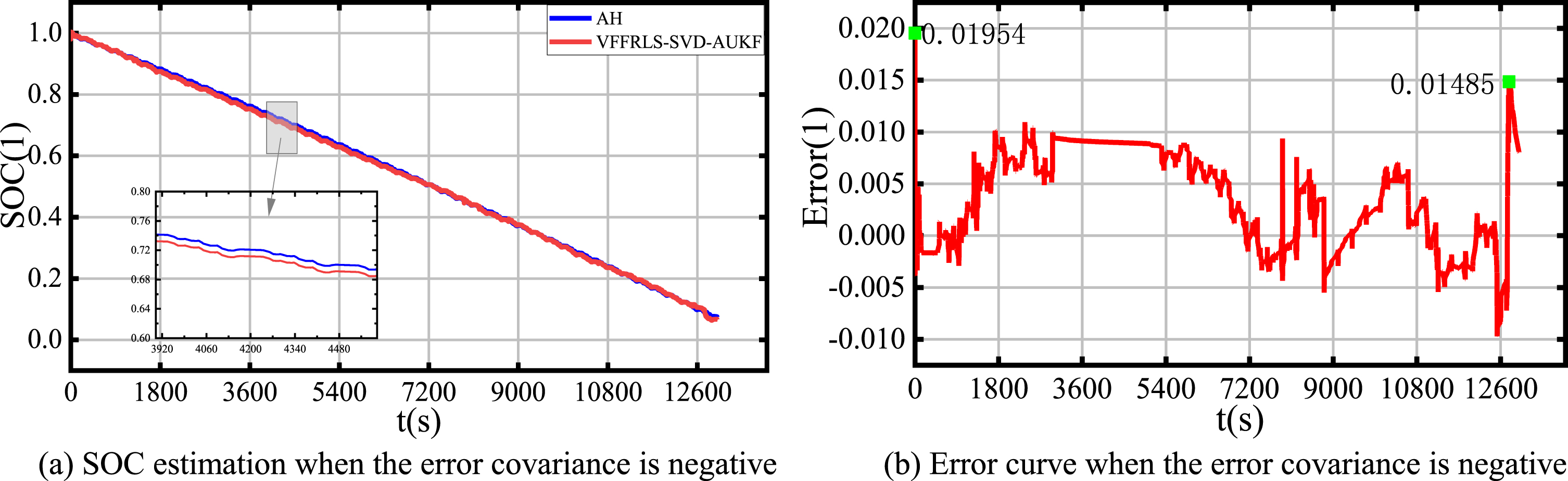
SOC estimates and error curves at BBDST when the error covariance is negative.
Incorrect SOC initialization will cause large errors in the SOC estimation algorithm, and test the tracking performance of the algorithm. In the case of an incorrect SOC initialization setting, the ampere-hour integral will not be able to trace back to the correct SOC estimation due to the wrong SOC initial value. To verify the SOC estimation performance of the VFFRLS-SVD-AUKF algorithm when incorrect initial values of SOC were encountered, we set the initial value of SOC to 0.8, while all types of noise, as well as the covariance matrix, were consistent with the above. Since the superiority of the AUKF and UKF algorithms compared to the EKF algorithm has been verified above, we do not compare them here with the EKF algorithm. Here we use the VFFRLS-SVD-AUKF algorithm, the SVD-AUKF algorithm, and the SVD-UKF algorithm to estimate SOC values under BBDST and DST conditions. The SOC estimation curves and estimation errors are shown in Figs. 12 and 13.
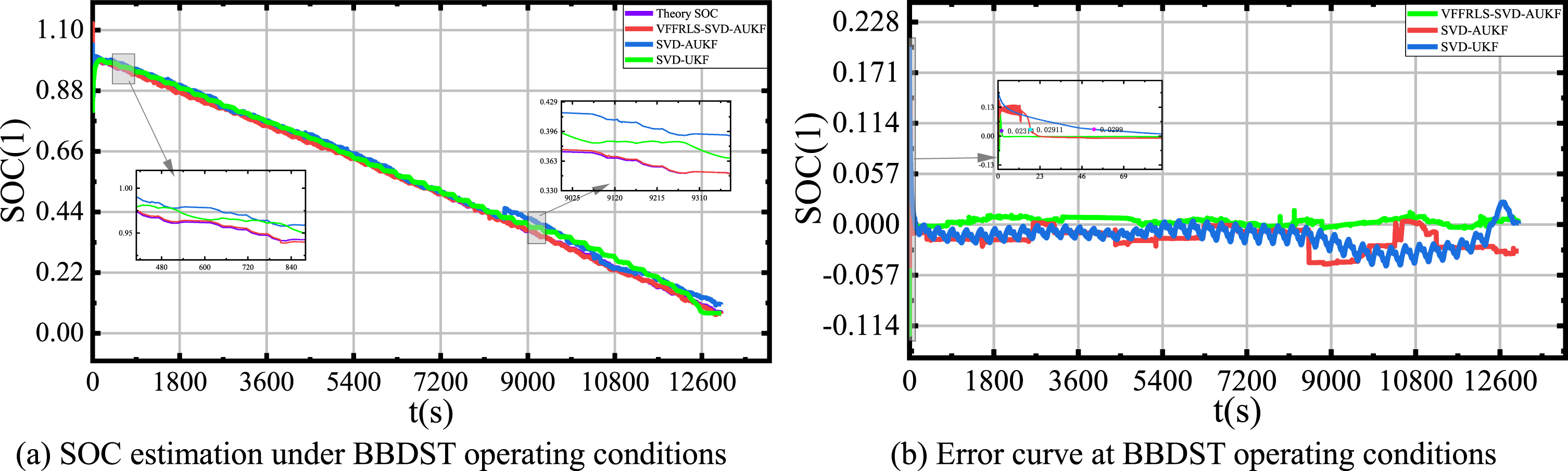
SOC estimation and error curve at BBDST operating conditions for an initial SOC value of 0.8.
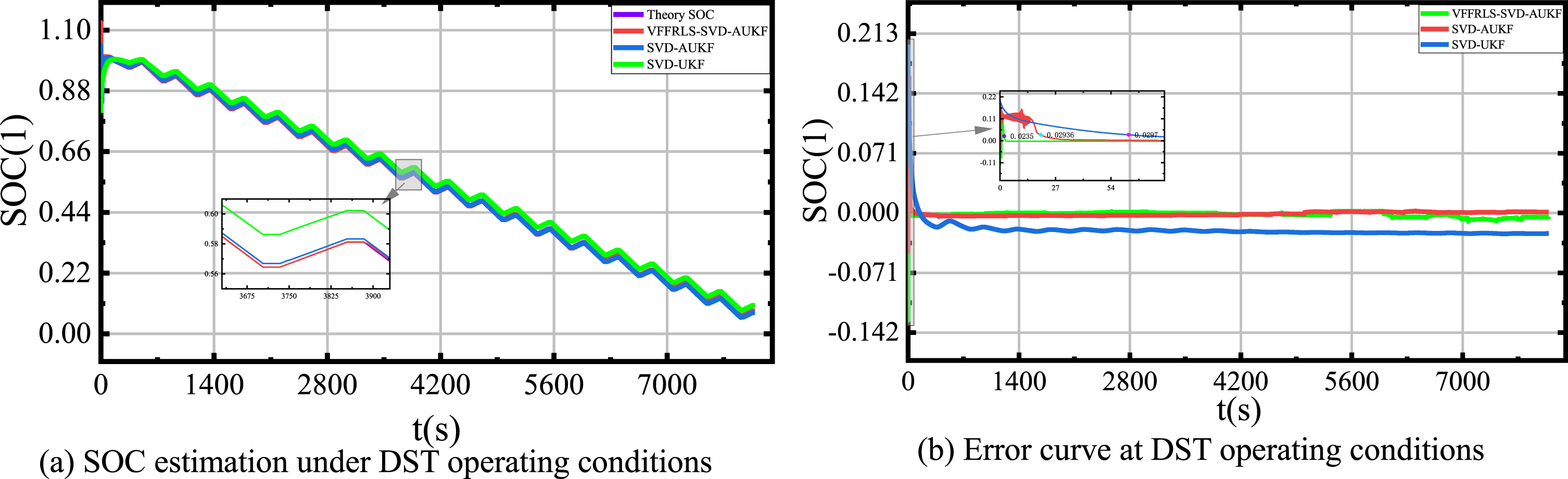
SOC estimation and error curve at DST operating conditions for an initial SOC value of 0.8.
As can be seen from Fig. 12, the VFFRLS-SVD-AUKF algorithm took 2 seconds to reduce the first error to within 3% for the BBDST condition, while the SVD-AUKF algorithm took 17.8 seconds to reduce the first error to within 3% and the SVD-UKF algorithm took 53.1 seconds to reduce the first error to within 3% because the initial value of SOC was set to 0.8. As can be seen from Fig. 13, the VFFRLS-SVD-AUKF algorithm took 2.1 seconds to reduce the first error to within 3% for the DST condition, while the SVD-AUKF algorithm took 19.8 seconds to reduce the first error to within 3% and the SVD-UKF algorithm took 62.5 seconds to reduce the first error to within 3%. The VFFRLS-SVD-AUKF algorithm was validated for both operating conditions, and finally, it was shown that the VFFRLS-SVD-AUKF algorithm still has good SOC estimation capability even with incorrect initial SOC settings, faster tracking compared to both the SVD-AUKF algorithm and the SVD-UKF algorithm, and good convergence under complex operating conditions.
In this paper, the VFFRLS online parameter identification method is combined with the SVD-AUKF algorithm based on the second-order RC model to characterize the state and output characteristics of lithium batteries. It can be summarized as the following four points: To address the focus and difficulty of stable and accurate estimation of the core parameter SOC of BMS, a model parameter identification method with variable forgetting factor FFRLS is proposed and combined with the SVD-AUKF algorithm for joint online estimation method of battery SOC (VFFRLS-SVD-AUKF), the FFRLS algorithm with variable forgetting factor has better stability than FFRLS algorithm in dealing with inappropriate forgetting factor The FFRLS algorithm with variable forgetting factor has better stability compared to the FFRLS algorithm. At the same time, good recognition accuracy is guaranteed. The VFFRLS-SVD-AUKF algorithm is compared with the VFFRLS-EKF and VFFRLS-UKF algorithms in the BBDST and DST conditions, and the results show that the VFFRLS-SVD-AUKF algorithm is significantly more accurate than the other two algorithms in estimating SOC and is also more stable. The VFFRLS-SVD-AUKF algorithm adds the SVD decomposition method and the adaptive link to the VFFRLS-UKF algorithm, and the adaptive link in the AUKF algorithm can improve the accuracy of the UKF algorithm in estimating SOC. The experimental results also show that the maximum error is 0.01954 when the error covariance is negative, so the SVD-AUKF algorithm with SVD decomposition can guarantee stable and accurate SOC estimation in complex conditions. The fast convergence and tracking performance of the VFFRLS-SVD-AUKF in both BBDST and DST conditions with incorrectly set SOC initial values were verified by setting the SOC initial values. In particular, with the initial value of SOC set to 0.8, it took 2 seconds to reduce the first error to within 3% in the BBDST condition. The first error reduction to within 3% in the DST condition took 2.1 seconds, which is significantly faster than the other two algorithms, thus demonstrating the significant improvement of the VFFRLS algorithm over the SVD-AUKF algorithm.
Accurate estimation of SOC of Li-ion battery is the key point and difficulty of Li-ion battery condition monitoring. The SOC of the battery is the core parameter of the BMS, and ensuring the accurate estimation of the SOC is very important to ensure the stability and safe use of the battery. Real-time environments may face the influence of temperature, humidity, and different atmospheric pressure. In this paper, only the influence of temperature is considered, which is also an important factor that has a great influence on the operation of lithium-ion batteries. To ensure the reliability of the algorithm, the VFFRLS-SVD-AUKF algorithm proposed in this paper is verified by the above four aspects under both BBDST and DST conditions. The experiment shows that, compared with the VFFRLS-EKF algorithm and VFFRLS-UKF algorithm, the VFFRLS-SVD-AUKF algorithm has a significant improvement in stability and accuracy. It is also verified that the VFFRLS-SVD-AUKF algorithm performs well in terms of stability and accuracy when the error covariance is negative to ensure SOC estimation. It has also been demonstrated that the VFFRLS-SVD-AUKF can quickly and accurately estimate the lithium battery SOC even under complex operating conditions with incorrect initial SOC values.
Footnotes
Acknowledgments
The work was supported by the National Natural Science Foundation of China (No. 62173281,61801407).