
Abstract
To overcome the problem of dynamics coupling between a space robot and a target satellite, this study introduces a new coordinated motion control approach with an adaptive filtering algorithm for a dual-arm free-floating space robot. Based on the reaction null space control scheme, one arm is used to complete the capture task and the other to counteract disturbance to the space base. However, when space robot captures a noncooperative target, the system may experience abrupt changes in dynamic parameters and output measurement noise, which can cause traditional control methods to achieve poor results in practical applications. Thus, an adaptive filtering algorithm with a variable forgetting factor is proposed to improve the tracking capabilities and robustness of the system. The convergence analysis is performed based on a Lyapunov function. The simulation results demonstrate the effectiveness of the proposed algorithm.
Keywords
Introduction
With the development of astronautic technology, space robots have been playing an important role in space exploration. Their main missions include capturing and repairing noncooperative space objects or debris and supporting astronauts in replacing or assembling components on space stations. Therefore, many countries have paid significant attention to the development of space robotic technologies. The SUMO/FREND project and the Phoenix Program 1 exemplify typical orbital applications of space robots. The main characteristics of the two projects are that the space robots have more than one manipulator, and the inertial parameters of the target spacecraft are much larger than those of the robot.
A number of investigations on the capture of satellites and space debris have been conducted. To describe the coupling relationship between a satellite base and its mounted manipulators, researchers in this field generally tend to separate the on-orbit capture missions into four phases. 2 The first is the observing and approaching phase where a space manipulator is controlled and moved toward the grasping location by gradually following the motion of the target. The second phase is the capture (physical contact) phase in which the end-effector of the space manipulator physically captures the target. In the third phase, the space manipulator firmly captures the target satellite and applies the control strategy to deal with the tumbling motion and dynamic uncertainties. The fourth is the compound stabilization phase in which the space robot dampens the motion of the target. In this study, we address the problems that arise in the post-capture and compound stabilization phase. The main topic presented in this study is the minimization of the disturbance to the base after capturing a large noncooperative target satellite. This task is necessary since the antennas of the servicing base must be pointed toward the Earth 3 ; therefore, the base attitude must be maintained.
To resolve the dynamic interaction problems of free-floating robots, a well-known concept of reaction null space (RNS) control law has been widely employed. The RNS control law was originally proposed by Nenchev et al. 4 to achieve the attitude control of a free-floating space robot. Yoshida et al. 5 applied RNS control to stabilize the base attitude in the ETS-VII project, which proved useful. In Dimitrov and Yoshida, 2 a distributed momentum control strategy was proposed for capturing a tumbling satellite. The RNS motion control was employed to control the joint motion and spacecraft attitude. Recently, based on RNS control, Huang et al. 6 planned zero-disturbance end-effector paths for a dual-arm space robot using a dynamic balance control algorithm. However, most of the approaches mentioned above have relied on the accurate dynamic parameters of the target, such as mass and moment of inertia.
In the presence of parameter uncertainties, a wide range of adaptive controllers have been developed for space robots. After capturing an unknown target, adaptive techniques were proposed in the literature 7,8 to avoid the effect of parameter uncertainties on the base attitude and achieve trajectory tracking of the end-effector. Nguyen-Huynh and Sharf 9,10 presented an adaptive reaction null space (ARNS) control algorithm to satisfy the objective of maintaining a minimum disturbance to the base without knowledge of the target dynamics. In the proposed adaptive approach, the recursive least squares (RLS) algorithm was employed to update the reactionless joint rates for parameter adaptation in an online manner. An adaptive filter was used to update the estimated parameters at each time sample. In the classical RLS algorithm, the forgetting factor is constant with values between 0 and 1. However, it is unsuitable for tracking time-varying parameters since the algorithm gain converges to zero, which leads to an exponential growth of the filter gain matrix 11 To resolve the conflicts, numerous variable forgetting factor RLS (VFF-RLS) algorithms have been developed. 12–14 In this study, we improve a variable forgetting factor weighted recursive least square (VFF-WRLS) algorithm for system identification and apply it to the coordinated motion control for a dual-arm space robotic system. This algorithm avoids the covariance explosion problem arising in the RLS algorithm with a constant forgetting factor. In this case, past data are gradually discarded on the assumption that more recent data are more informative.
The main contribution of the proposed algorithm can be stated as follows: The conventional RNS motion control scheme is implemented in a dual-arm space robot in which both arms execute ARNS motion. This adaptive control scheme is developed to stabilize a noncooperative target with an unknown momentum without the use of attitude control system (ACS) devices such as thrusters or reaction wheels. In the presence of parameter uncertainties, an improved adaptive filtering algorithm with a VFF that improves the tracking capabilities and robustness of the system is implemented. The VFF is defined based on the prediction errors, and a basic convergence analysis is performed to make this approach more practical to the robotic system. This article is organized as follows. In the second section, the kinematic model of a dual-arm space robot is built and the coordinated motion equation is obtained. Then, the ARNS algorithm for the dual-arm space robot is developed with a VFF-WRLS algorithm, and a convergence analysis of the algorithm is conducted. In the fifth section, a set of simulations verify the proposed methods. The conclusions are summarized in the last section.
Dual-arm space robot system
Basic assumptions
During the operation, the space robot is in a free-floating mode. We assume that: The system is composed of rigid bodies only, and the origin of the inertial frame After the target is grasped by the space robot, it is fixed to the end-effector. Thus, there is no relative motion between the end-effector and the target. There is no initial angular momentum on the space robot. In the absence of any external forces or torques on the system, the total momentum is conserved. We do not consider any momentum exchange devices in this study such as reaction wheels or thrusters.
Kinematic modeling of a dual-arm space robot
As shown in Figures 1 and 2, 15 a dual-arm space robotic system for a capture task typically consists of three major parts: 16 a space base or servicing satellite, two arms mounted on the space base, and the satellite or debris to be captured. Figure 1 shows the space base and the two arms that comprise the servicing system. In this scenario, we use one arm to complete the capture mission and the other to counteract the disturbance to the base.
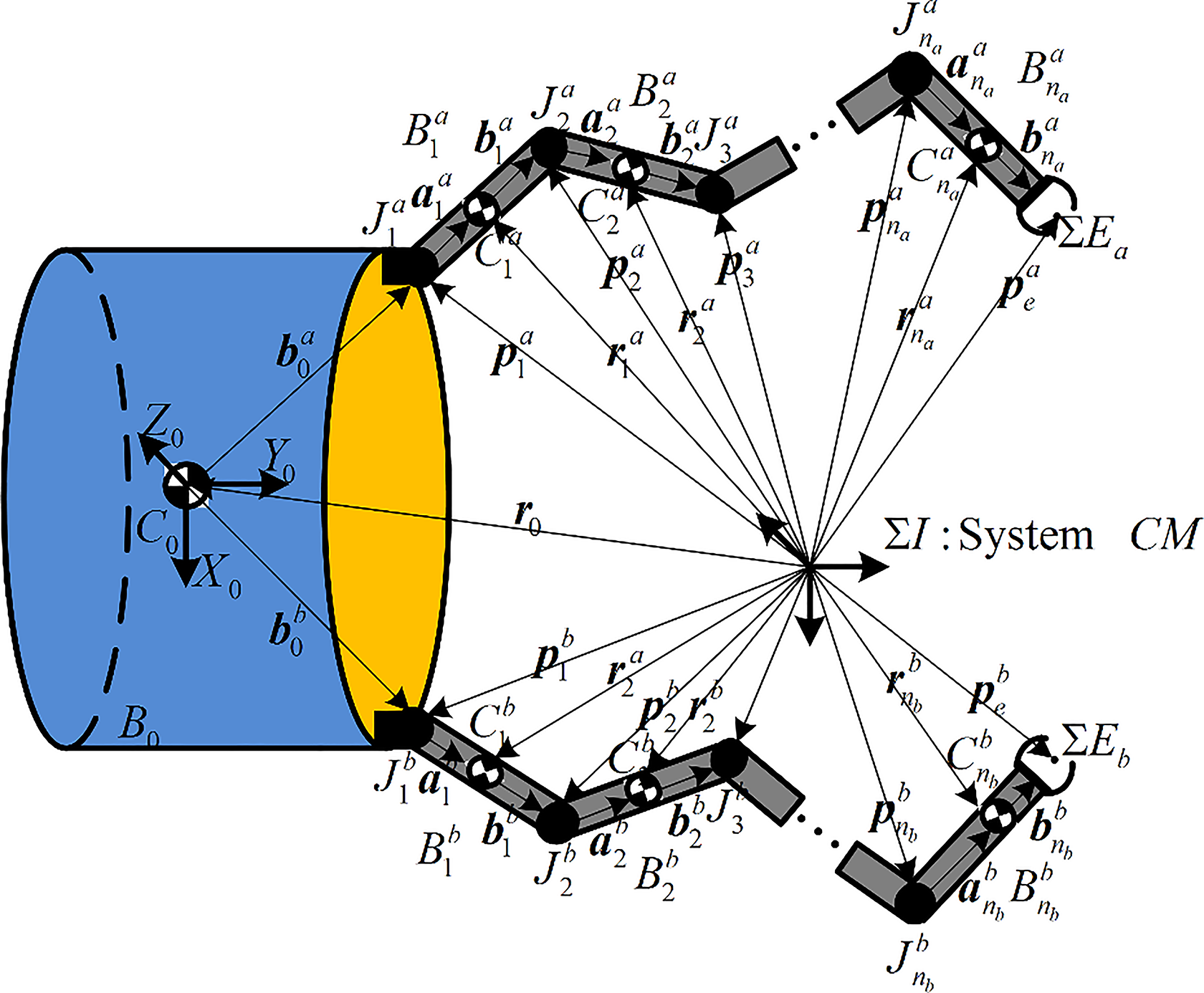
Dual-arm space robot system.

Part of a target captured by the space robot.
The principal difference between a space robot and a ground-fixed robot is that the base of a space manipulator is allowed to be uncontrolled (free-floating mode operation) in the orbital environment. Special attention must be paid to the dynamic coupling between the space base and its manipulators. The kinematic and dynamic model of a dual-arm space robot has been described in Jiao et al.
17,18
For clarification purposes, we recall the process of building the kinematic model here. The body 0 in Figure 1 represents the space base of the space robot, which is connected to two manipulators, each with three links. Manipulator joints are revolute and have a single degree of freedom. The inertial position of the link


where




where
To decrease the fuel consumption, we eliminated the use of ACS devices such as thrusters or reaction wheels. Under Assumption (3), there are no external forces or torques acting on the space robot system; therefore, the linear and angular momentum of the system are conserved, which means


where

According to equations (7) to (9), we have

Reformulating equations (7) and (10) in a matrix form, we obtain

where

where


Then, the angular momentum conservation equation is achieved by removing the linear velocity of the space base in equation (12)

Assuming that there is no attitude disturbance to the base

In this task, arm-a is used to accomplish the capture task and arm-b is designed as the balance arm mainly used to compensate for the attitude disturbance owing to the motion of arm-a; thus, the mapping relationship between the two arms can be formulated as

where

The precondition of utilizing equations (13) to (16) is that the initial angular momentum is zero. For the general case when the precondition is not satisfied and the tumbling target carries an initial angular momentum

where

After capture, the angular momentum of the entire system becomes

Substituting for

It can also be described as

Apparently, the expressions of

where

or, more succinctly,

where
Thus, the regression form in equation (23) is the foundation of the ARNS control scheme for a dual-arm space robot system. From this regression form of equation (23), it can be viewed that if the joint rates
Weighted recursive adaptation algorithm with VFFs
If perfect knowledge of the system properties is available, equation (23) can be considered as an alternative to compute the RNS motion. However, to capture a noncooperative target, the mission will involve an unpredictable change in the inertia properties as well as the total momentum of the space robotic system. When the system has parameter uncertainties, one way to cope with such an issue is to develop an adaptive control algorithm to reduce the uncertainties. In the system identification context, the RLS algorithm with exponential data weighting was employed to adaptively update the joint velocities online.
The time-varying system commonly can be represented by a linear regression equation, that is, equation (23), which is the fundamental scheme of the ARNS motion for a dual-arm space robot system. In our conception of ARNS algorithm, we assumed that it was not necessary for the manipulators to follow any specific trajectory because the main objective was to minimize the disturbance to the base immediately after the capture of the tumbling target. Thus, the desired joint velocity

where
According to the relation equations (23) and (24), one can obtain the data generating mechanism

where the time index n is introduced to describe the discrete nature of the process in a practical control system, assuming a sampling rate of
Then, it is natural to define the a priori estimation error as


Weighted RLS algorithm with exponential forgetting factor
It is more common in the adaptive filtering scenario expressed as a system parameter identification problem in Figure 3 to employ a weighted regularized least-squares cost function. Here

where

System identification problem.
The corresponding mean of the criterion function J is readily seen to be a mathematical expectation, that is, the criterion function equation (26) reduces to

A recursive form for the weight factor

According to equation (30), one further concludes that

The typical value of

Basically, the cost function in equation (28) represents the mean of squares of the prediction errors
According to equations (26) and (27),

Solving the obtained algebraic equation over

Equation (34) is the non-recursive form of the WRLS algorithm. According to the relation equation (30), a possible recursive version can be obtained as

The matrix
After applying the lemma on matrix inversion 20 in equation (35), one obtains



where
Choice of forgetting factor on prediction error
The forgetting factor
In the articles,
9,10
a constant forgetting factor λ was employed, but problems can occur in an adaptive control situation. Since the matrix
To overcome this problem, the fixed exponential forgetting factor
The idea of exponential data weighting with VFF was employed. It has been shown in the study by Goodwin and Sin
21
that a good choice for

where

Unlike traditional VFF schemes, the improved VFF-WRLS algorithm is built on prediction errors. Equation (40) represents a normalized error because the term
In the typical RLS algorithm with a fixed exponential forgetting factor,

Hence, the new VFF-WRLS algorithm can be obtained by equations (24) to (40). The new VFF-WRLS has a higher numerical stability and faster convergence than the conventional RLS algorithm in the study by Nguyen-Huynh and Sharf. 9,10
Once

The proposed ARNS scheme with VFF requires measurements of the base angular velocity
It is emphasized that the principal objective of the proposed control algorithm is to maintain the attitude of the space base, that is,
The process of the complete algorithm is shown in Figure 4, and the following primary steps are obtained below, assuming a sampling rate of

ARNS control scheme with VFF-WRLS algorithm. ARNS: adaptive reaction null space; VFF-WRLS: variable forgetting factor weighted recursive least square.
As illustrated in Figure 4, the control architecture lies on two loops: the inner loop with the proportional–derivative (PD) joint velocity-based controller and the outer loop with the improved VFF-WRLS algorithm. The inner loop controller can drive the joint velocity error
Convergence analysis
Following the proposed approach to deal with a time-varying system, the convergence properties are discussed in this section. A nonnegative Lyapunov function

Using equations (25), (26), (37), and (38), we have

From equations (36) and (38), we obtain

The difference of

Inserting equations (44) and (45) into equation (46) gives

Recall that

It is clear that

It is clear from the equations above that
Simulation study
In this section, the proposed control algorithms are evaluated and compared using a planar dual-arm space robot. The free-floating space robot includes three components, two of which are three-link manipulators, while the third is the space base. The target is assumed to be firmly held by the end-effector of the mission arm with no relative motion as illustrated in Figure 5.

Dual-arm space robot with captured target.
The dynamic models of the system were created primarily in MATLAB/SimMechanics with S-functions. The geometric and dynamic parameters of the space robot and the target are presented in Tables 1 and 2. The desired motion generated by ARNS was produced by driving the joints with torques computed using the PD control law with constant gains for the entire motion. The parameters of the PD controller are presented in Table 3.
Parameters for dual-arm space robot.

Initial joint state for dual-arm space robot.

PD controller parameters for dual-arm space robot.

PD: proportional–derivative.
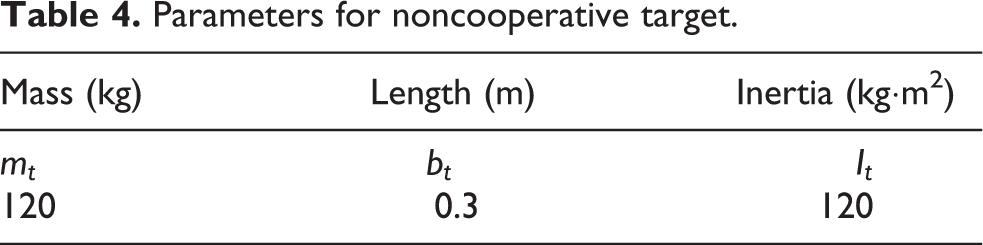
To demonstrate the capability of the proposed algorithm, the noncooperative target was much larger than the space robot. The mass and inertia were assumed to be almost three times as large as that of the servicer (refer to Table 4).
Parameters for noncooperative target.
The space robot initially has no momentum before capture, and the target is tumbling with an initial angular velocity. The initial adaptation gain matrix was chosen as
The proposed algorithm was tested for two basic cases:
Case A: Test case with
Considering the “noise” from inaccurate modeling and computer round-off errors, before the implementation of the algorithm, we first checked the accuracy of the simulation platform by examining the momentum conservation of the system during the ARNS motion. In this case, the initial momentum of the target was
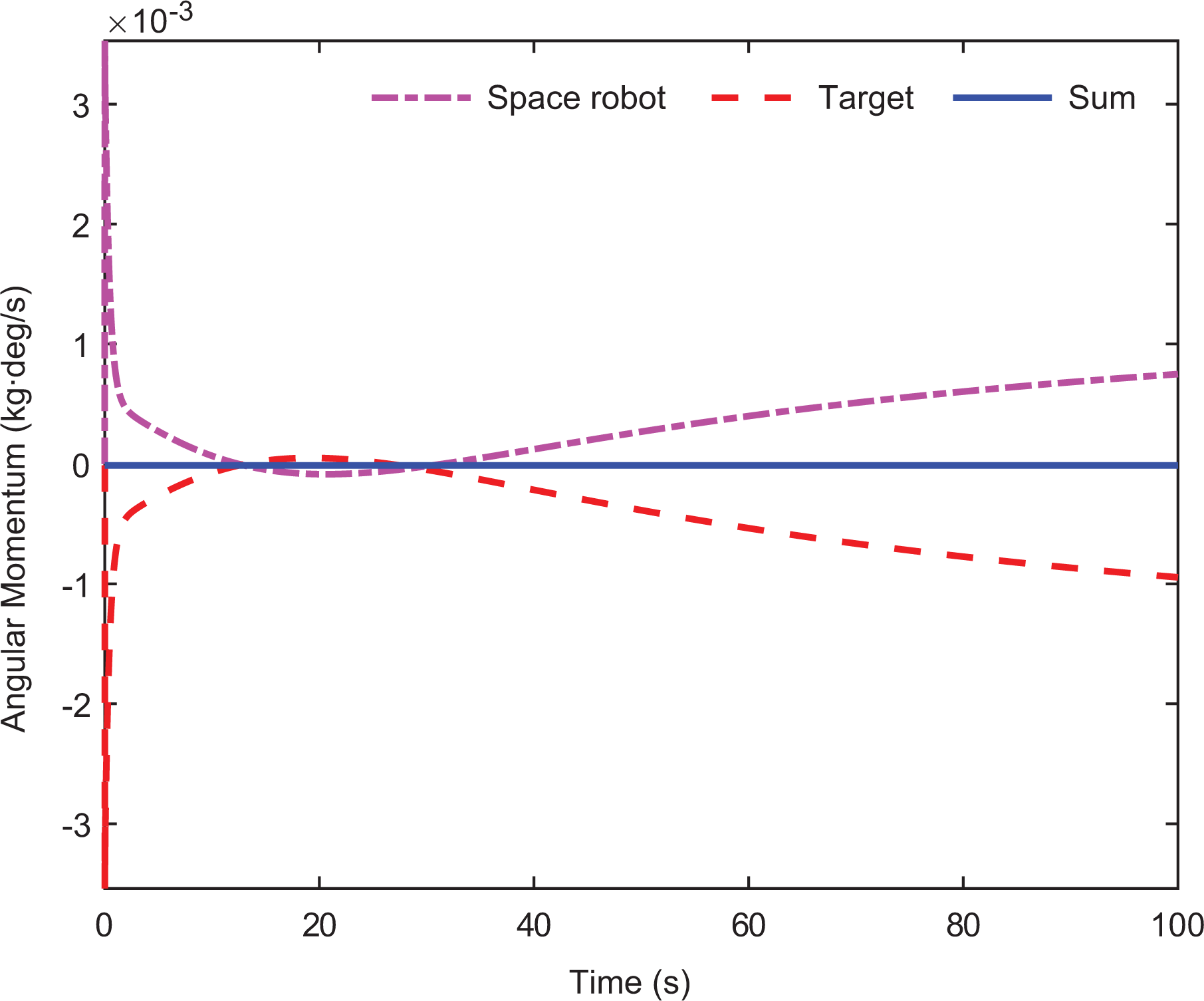
Angular momentum of system.

Base attitude
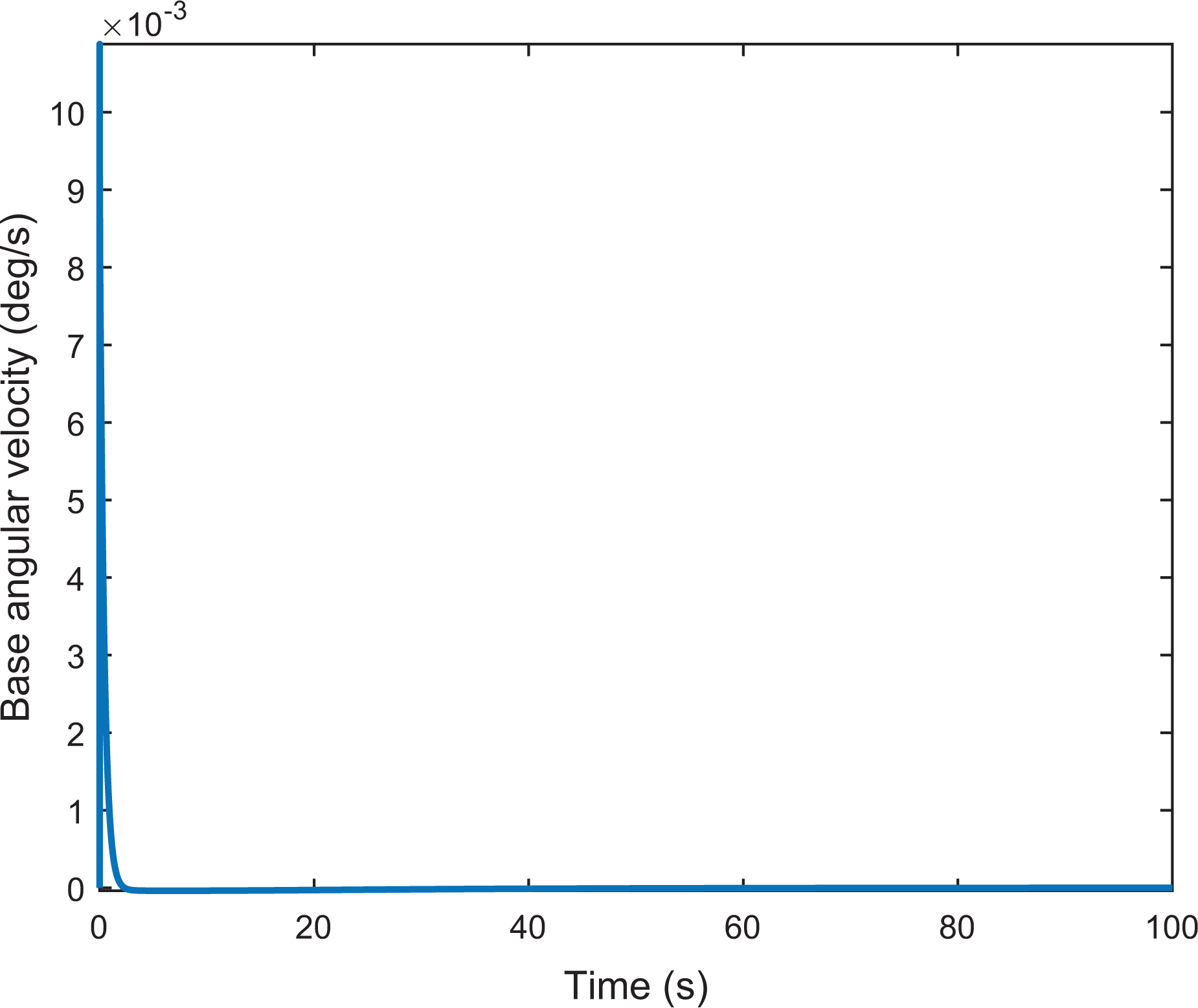
Base angular velocity

Joint rates

Joint rate errors

Prediction errors
Case B: Test case with
In this subsection, the improved VFF-WRLS algorithm tested by simulating the capture of a tumbling target is described. As in the previous simulations, we assumed that the target was attached rigidly to the end-effector after capture and its tumbling motion was emulated with an external impulse torque of 240 N·m applied to the target for a duration of 0.005 s. The initial forgetting factor for the RLS algorithm was

Joint rates

Base attitude

Base angular velocity,

Joint rate errors

Prediction error
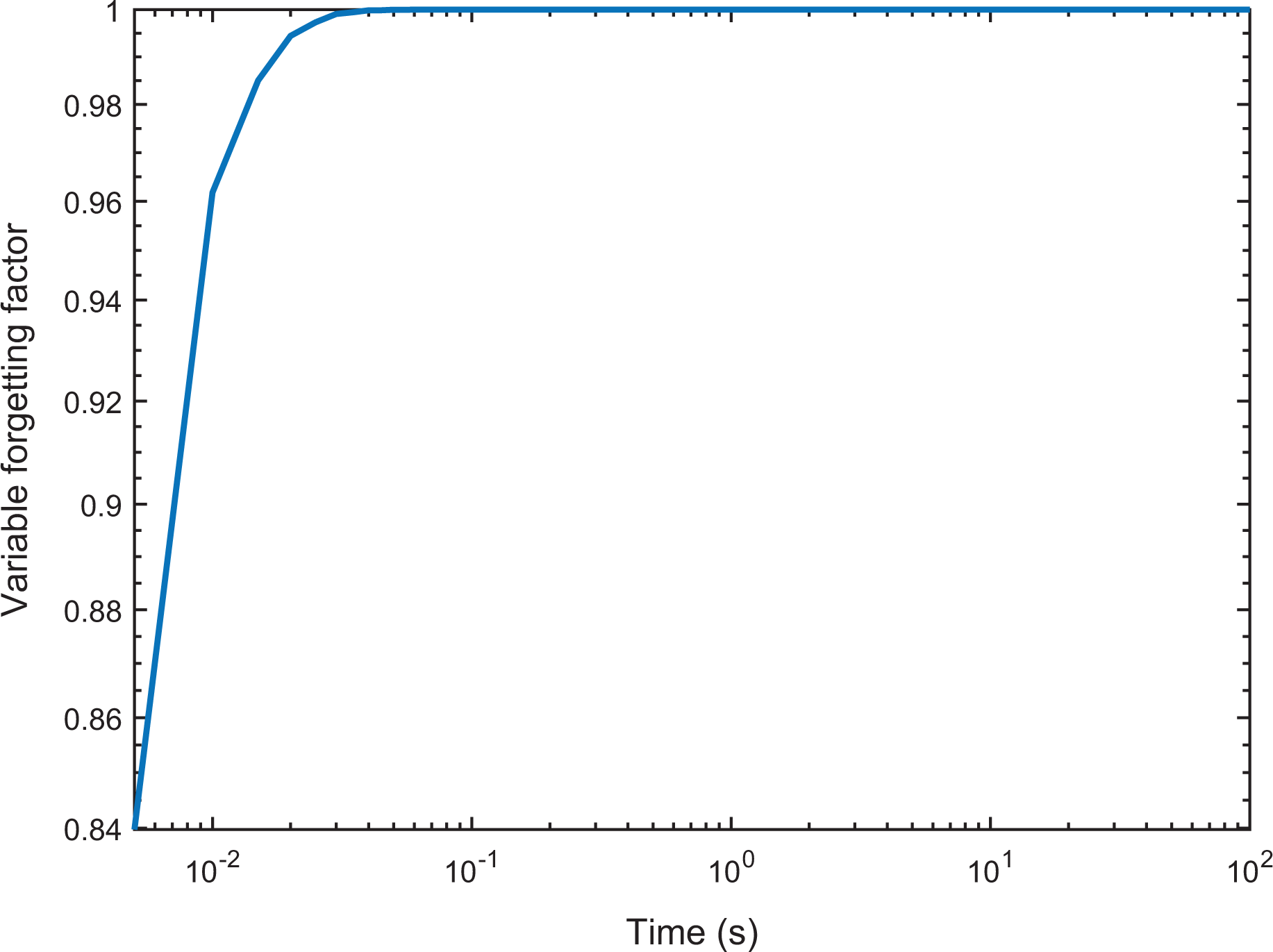
Variable forgetting factor
Figure 12 shows the joint rates, from which one can observe that the arms were initialized at the instant of capture with rates
Case C: Convergence analysis
To evaluate the performance of the proposed VFF-WRLS algorithm, we compared the classical RLS algorithm with different constant values of forgetting factor with the improved VFF-WRLS algorithm. The forgetting factors were set with typical values of

Prediction errors
Initially, with poor parameter estimates (within the first 0.1 s), the resulting feedback leads to bad regulation, and hence the data are rich in information. Then, as the estimates converge, the system under feedback tends to settle down, but simultaneously the estimation covariance matrix

Disturbance to base with RLS, constant forgetting factor: (a).
The obtained experimental results based on the simulations pointed out that the use of a VFF leads to a better adaptability of the filtering parameter estimation in comparison to the conventional algorithm with a fixed forgetting factor. With the correct choice of forgetting factor, the improved VFF-WRLS algorithm achieved a faster convergence and a greater robustness.
Conclusion
This study presented a practical implementation of a weighted RLS algorithm with a VFF for a dual-arm space robot capturing task. In the course of on-orbit servicing, the tumbling target was assumed to be much larger than the space robot, which meant that the uncertainties of the inertia properties of the target would degrade the control performance and the compound stabilization. To address this problem, the ARNS algorithm was extended to a dual-arm space robot and was enhanced by incorporating the VFF-WRLS technique. The novelty of the proposed VFF-WRLS algorithm lies in the time-varying function of determining the forgetting factor as well as relating the forgetting factor to the prediction error in the estimated parameters. The convergence properties of this algorithm were analyzed. Simulation results revealed the good performance of the proposed algorithm for both maintaining a minimum disturbance to the base and guaranteeing the convergence of tracking errors. We conclude that the proposed methods are applicable to a dual-arm space robot supplying on-orbit services.
Based on the proposed methods, we provide here a brief account of some implementation considerations in adaptive control design to raise some issues relevant to practical applications. Adaptive control is a useful way of approaching control problems, but in practice, one must keep in mind the practical realities of the problem under study and include as much physical insight as possible. One of the first decisions that must be made in digital control is the sampling speed. This varies greatly depending on the application and hardware (from milliseconds to minutes). Roughly, the sampling period should depend on the computation speed, system time delay, choice of control law, and other factors. To apply the algorithm into practice, we must investigate the performance of our prototype estimation scheme in the presence of bounded noise, such as measurement noise, inaccurate modeling, and computer round-off errors. The ARNS algorithm was analyzed under somewhat idealized assumptions. However, in practice, one must be aware of the degree of robustness of the algorithms to conditions that do not strictly comply with the assumptions. The computation cost should be analyzed for the adaptive filtering algorithm because the high number of estimated states leads to a larger number of calculations that increase the time delay of the system and possibly deteriorate the overall performances. In particular, for a space robotic system, the performance of a microcomputer is worse than that of a normal computer on the ground. To ensure security of the operation, self-collision detection algorithm should be considered for multi-arm robotics. Space robot is a kind of complex multi-body system, which may cause the collision between the links, the spacecraft module and external objections while in the on-orbit tasks. A challenge of real-time self collision detection is its computation cost, since computation resource for a space robot is limited. Servo loop, sensor-based motion generator, and collision checker need to share the resource.
Footnotes
Nomenclature
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61673239, 61703228) and Science and Technology Project of Shenzhen (JCYJ20160301100921349, JCYJ20170817152701660).