
Abstract
The performance of Interval type-2 fuzzy logic system (IT2FLS) can be affected by many factors including the type of reduction methodology followed and the kind of membership function applied. Further, a particular membership function is influenced by its construction, the type of optimisation and adaptiveness applied, and the learning scheme adopted. The available literature lags in providing detailed information about such factors affecting the performance of IT2FLS. In this work, an attempt has been made to comprehensively study the factors affecting the performance of IT2FLS by introducing a new trapezoidal-triangular membership function (TTMF). A real-time application of drilling operation has been considered as an example for predicting temperature of the job, which is considered as one of the key state variables to evaluate. A detailed comparison based on membership functions (MFs) such as triangular membership function (TrMF), trapezoidal membership function (TMF), the newly introduced trapezoidal-triangular membership function (TTMF), semi-elliptic membership function (SEMF), and Gaussian membership function (GMF) has been performed and presented. Further, the average error rate obtained with two “type-reduction” methods such as “Wu-Mendel” uncertainty bounds and Center of sets type reduction (COS TR) has also been discussed. This study provides information for selecting a particular MF and “type reduction” scheme for the implementation of IT2FLS. Also, concludes that MF having fewer parameters such as GMF and SEMF possess significant advantages in terms of computation complexity compared to others.
Keywords
Introduction
Drilling operation is extensively used in production lines, particularly it is much more important in automotive and aerospace industries. Traditional drilling remains the better option for making holes, riveting, and fastening. Achieving economic drilling operations and planning a particular maintenance activity remains a challenging task in various industries. Such complexities can be minimised by predicting key variables such as temperature of the workpieces [1], thrust force, and torque [2]. In this work, the temperature is considered as a critical variable because it could be controlled based on the type and temperature of the cutting fluid. However, the workpiece temperature depends on various interrelated parameters and hence, the drilling operation can be explored further using AI techniques such as fuzzy logic, machine learning, etc. Handling uncertainties present in the data related to drilling operation is quite challenging, and affecting the accuracy rate in the prediction of machining parameters. Hence, IT2FLS is used in this work to address the data uncertainties in the prediction of drilling parameters by defining fuzzy space added with an extra dimension, the footprint of uncertainty (FoU). IT2FLS is considered in this work to handle the uncertainties present in the data for predicting the temperature of drilling operations. The literature available in the application of IT2FLS are discussed in the following paragraphs.
Literature review
Moreno et al. [3] designed an IT2FLS with back-propagation, which adjusts the membership function parameters for optimal computation time, the results were validated with available benchmark datasets. Mai et al. [4] optimised the parameters of GMF using particle swarm optimisation algorithm. The results have shown improvements in accuracy compared to other predictive techniques. Montazeri et al. [5] have created a fault detection and identification strategy for gas turbines utilising IT2FLS, and their work produced encouraging results in identifying gas turbine defects. Mahturi et al. [6] have proposed a MIMO controller to reduce the computation time of IT2FLS with an “enhance iterative algorithm with stop condition” type-reducer. Alagarsamy et al. [7] developed a novel fish school based IT2FLS approach for finding the anomalies in magnetic resonance imaging and found with highest prediction accuracy than the conventional techniques. Moradi et al. [8] have developed a non-iterative novel type-reduction method called “Moradi-Zirkohi (MZ) TR” to reduce computational cost for computing the centroid of fuzzy set. Dong et al. [9] proposed an IT2FLS with a PID controller to control the position of a serial elastic actuator.
Su et al. [10] proposed an IT2FLS with the combination of multi-objective ant colony algorithm for tuning the parameters of MFs, and the approach has shown better results in controlling a wall following hexapod robot. Phan et al. [11] developed IT2FLS to find the optimal engine torque to minimise the fuel consumption in ego-vehicles. Jung et al. [12] proposed a fault detection technique using IT2FLS in manufacturing systems, and the experimental results have shown better results than conventional methods. Badri et al. [13] developed an IT2FLS with SEMF to diagnose the risk state of a CNC turning centre. Also, developed a scheme for condition-based maintenance in IoT enabled hybrid flow shop using IT2FLS [14]. Masumpoor et al. [15] proposed an online algorithm by fusing type-2 neuro-fuzzy systems to handle parametric uncertainties and disturbances. Sanchez et al. [16] compared the results between a general type-2 fuzzy system and IT2FLS for controlling a mobile robot. Moura et al. [17] suggested an approach using IT2FLS to improve resource utilization and power efficiency in cloud computing. Du et al. [18] developed fuzzy tracking control using IT2FLS to improve the efficiency of an inverted pendulum and mass-spring-damper mechanical system. Dong et al. [19] has designed a machine vision system to measure tool wear in the flank face using a k-means clustering algorithm. Hu et al. [20] proposed a knowledge-based approach to archiving both functional and aesthetic information in conceptual design. Hassan et al. [21] optimised the parameters of interval type-2 fuzzy logic system using hybrid learning algorithm. The readers can also find further information from the survey presented by Mittal et al. and Hamaza et al. [22, 23].
Research gap and motivation
An attempt is made to fine-tune the data uncertainty in data by introducing secondary fuzziness in the fuzzy space. If the uncertainties are appropriately mapped, their impact on system performance will be reduced, and the systems will become more resilient and robust. Zadeh [24] presented a type-2 fuzzy control system to address data uncertainty. Additionally, according to Mendel [25], IT2FLS can accurately answer linguistic uncertainty.
All the research works mentioned above confirm that the performance of IT2FLS is affected by various factors such as ‘type-reduction’, key variables of the membership function, and type of learning systems adopted. Such kind of study is yet to be explored and hence, considered as a major research gap for the current work.
Significance of research
In this manuscript, an attempt is made to study on the influence of a new membership function, TTMF and to on the factors affecting the performance of IT2FLS. The TTMF has been explored in this work by applying “Wu–Mendel uncertainty bounds”, and COSTR type-reduction method in a real-time application. Further investigations have been made by comparing the results based on various MFs such as TrMF, TMF, SEMF and GMF. Hence, a comprehensive analysis is performed in IT2FLS by varying MFs and type reductions.
Drilling is a commonly used machining operation in various production lines and its performance is affected by various inter-related parameters. In the present study, the experiment dataset available in [1] is used for training the IT2FLS. The temperature of the drilling operation, which is one of the critical parameters, can be predicted by training the IT2FLS with the experimental datasets available. Simulations are performed with five MFs, and the results are evaluated to quantify the variation in the behaviour of IT2FLS.
Organization of the paper
The structure of this manuscript is organised as follows. Section 2 explains about all factors affecting the performance of IT2FLS. The key variables of MFs and their influence are discussed in Section 3. The results obtained are interpreted and presented in Section 4. Conclusion is drawn in Section 5, followed by references.
Factors affecting the performance of IT2FLS
The factors affecting the performance of IT2FLS are grouped under four categories as shown in Fig. 1. Computation is performed by varying the factors such type reduction, and membership function, whereas the learning process is based on a rule-based knowledge driven approach. For type reduction, COS TR method and Wu-Mendel uncertainty bounds method are considered for computation.
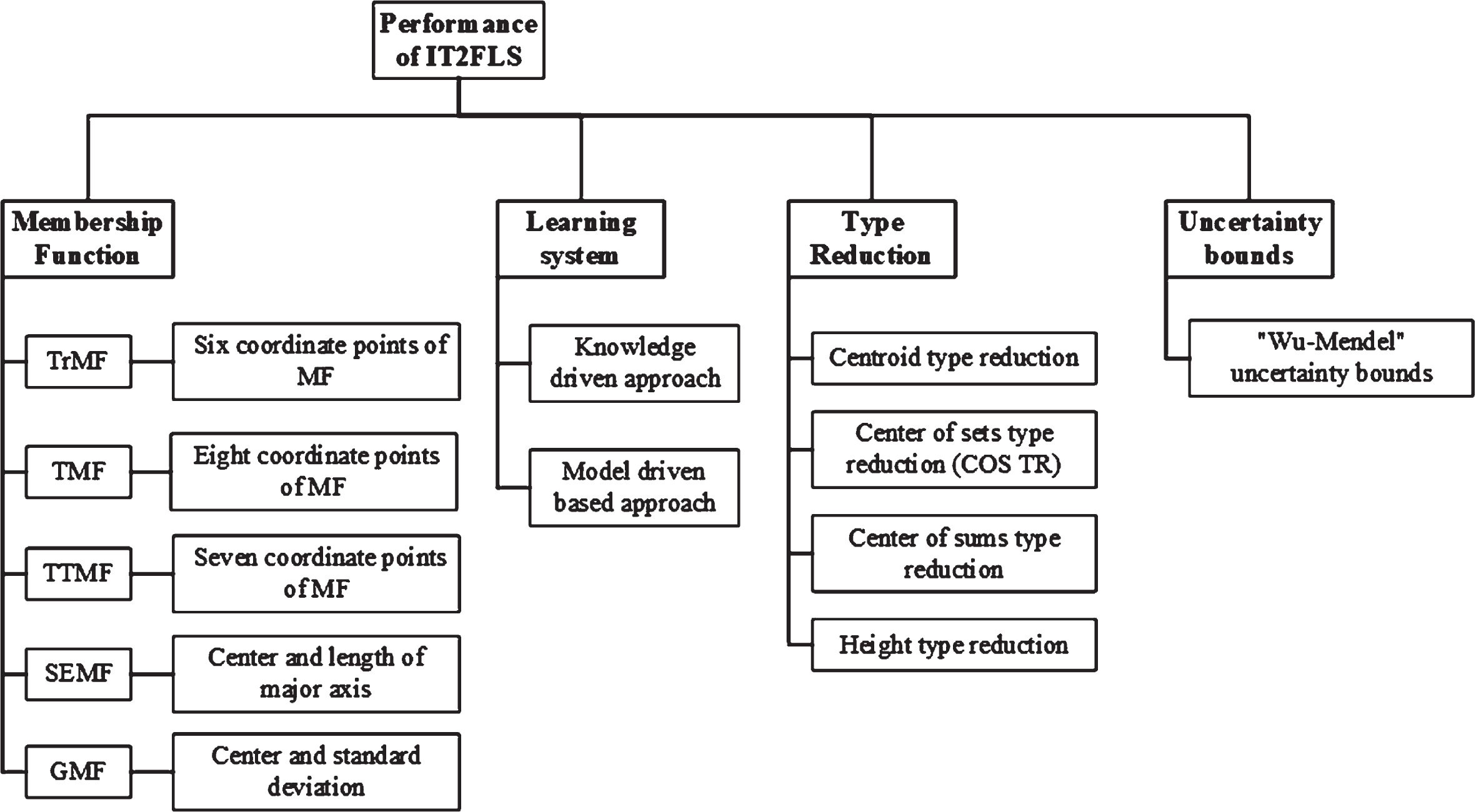
Factors affecting IT2FLS.
It is found form the dataset avaliable in [1] that the authors have performed experimental study on friction and plastic deformation in tool chip interaction during the drilling operation. AISI 1018 grade low carbon steel was used for machining, and the experimental sets were designed in an L9 orthogonal array sequence by varying input parameters such as cutting speed and feed rate. The output parameter considered is the temperature of the workpiece during the drilling operation. The influence of various other parameters is briefly discussed now.
Membership functions
The real continuous function in fuzzy sets is converted into arbitrary accuracy [28] by classifying the fuzzy space using MF. The fuzzy space of all input and output parameters are classified with linguistic variables. The type of MFs considered in this work are TrMF, TMF, the newly introduced TTMF, SEMF and GMF.
Fuzzification
The fuzzy space of both input and output parameters are classified with all five MFs. The analytical formulation of the MFs is presented in Table I. Lower membership function (LMF) and upper membership function (UMF) defines the FoU analytically. The graphical representation of fuzzy space classification of parameters for the respective MFs are shown in Fig. 2, 5 and 6.
Parameters of Membership Functions
Parameters of Membership Functions
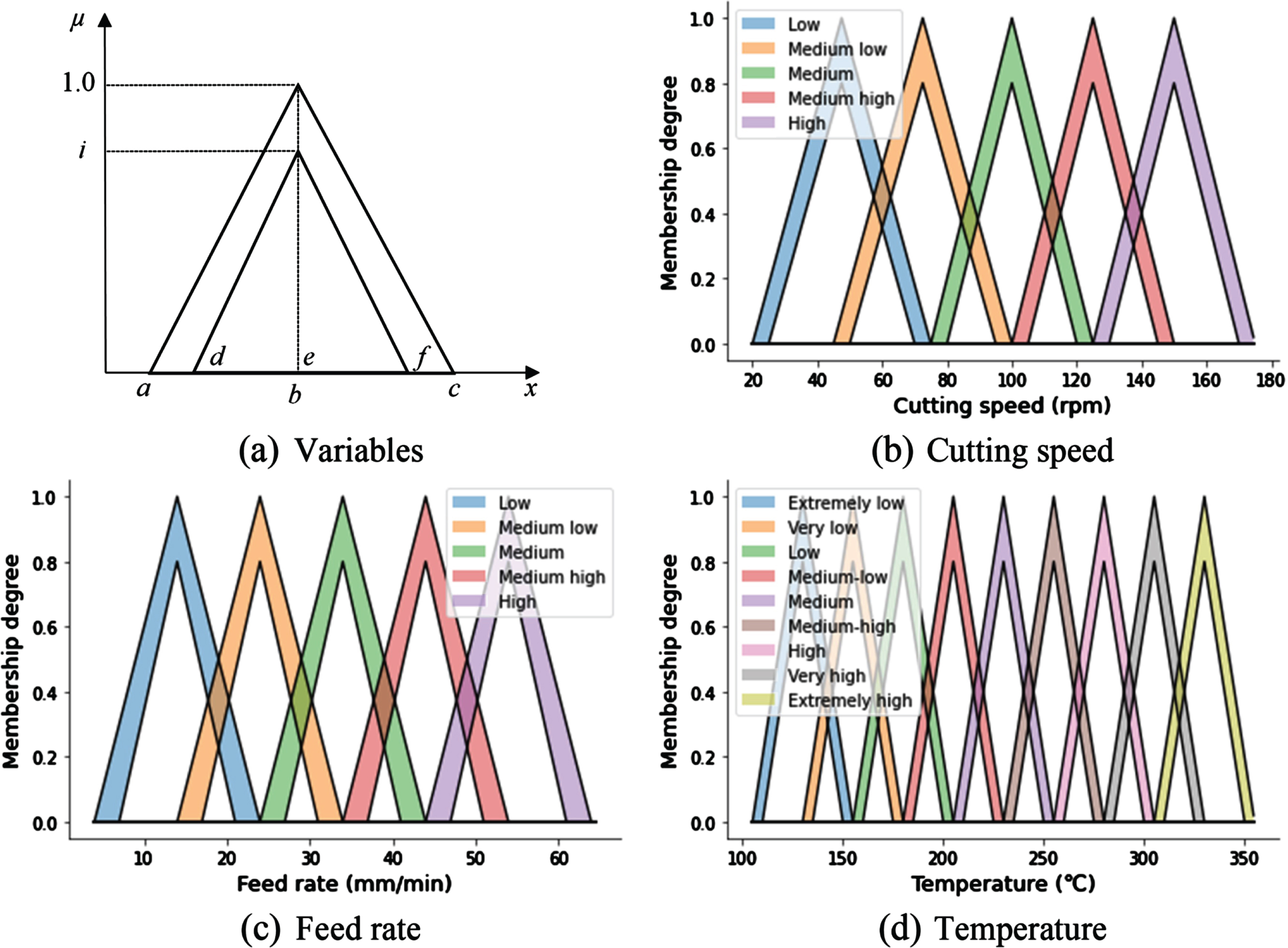
Fuzzy space classification with TrMF.
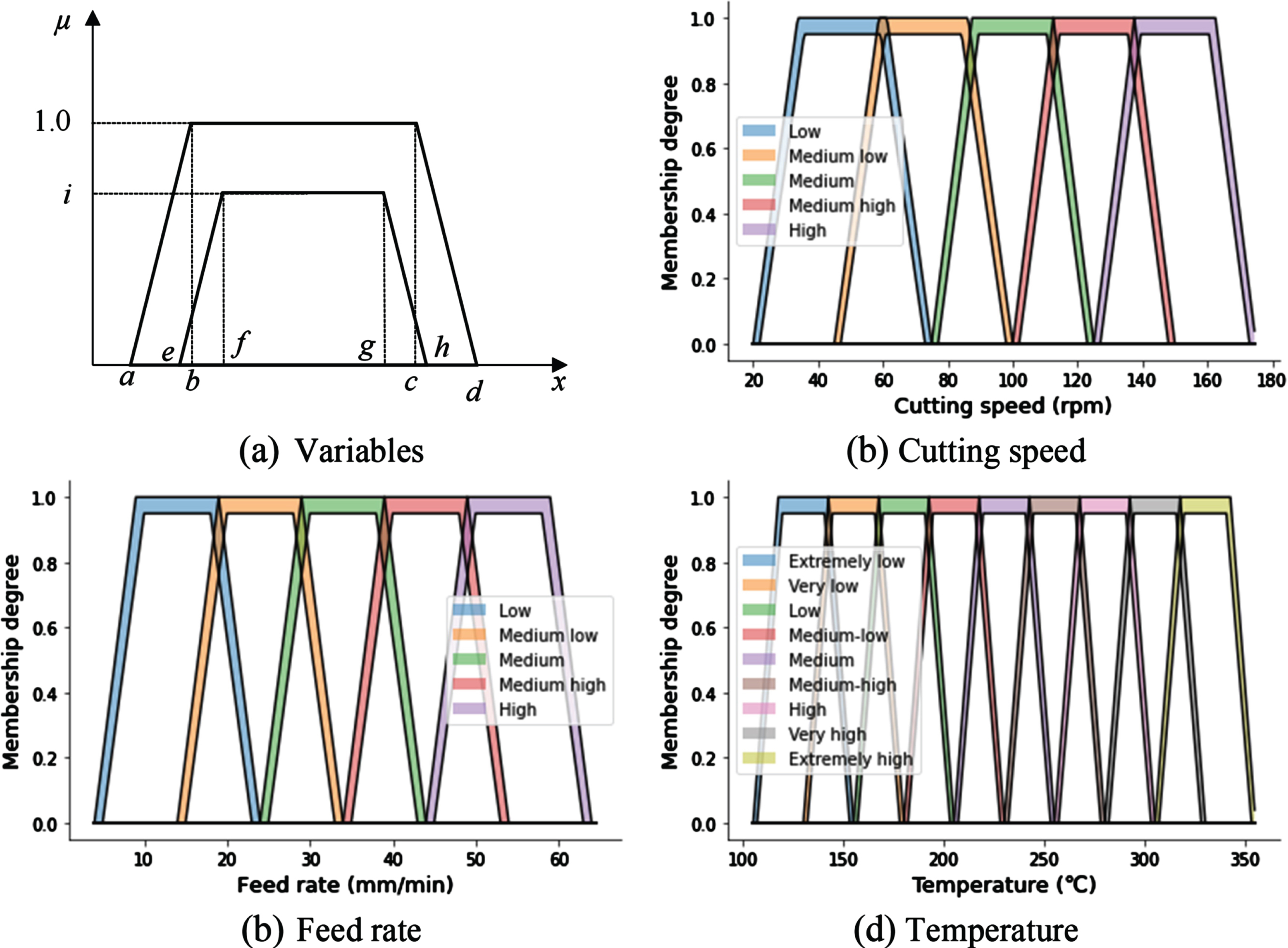
Fuzzy space classification with TMF.
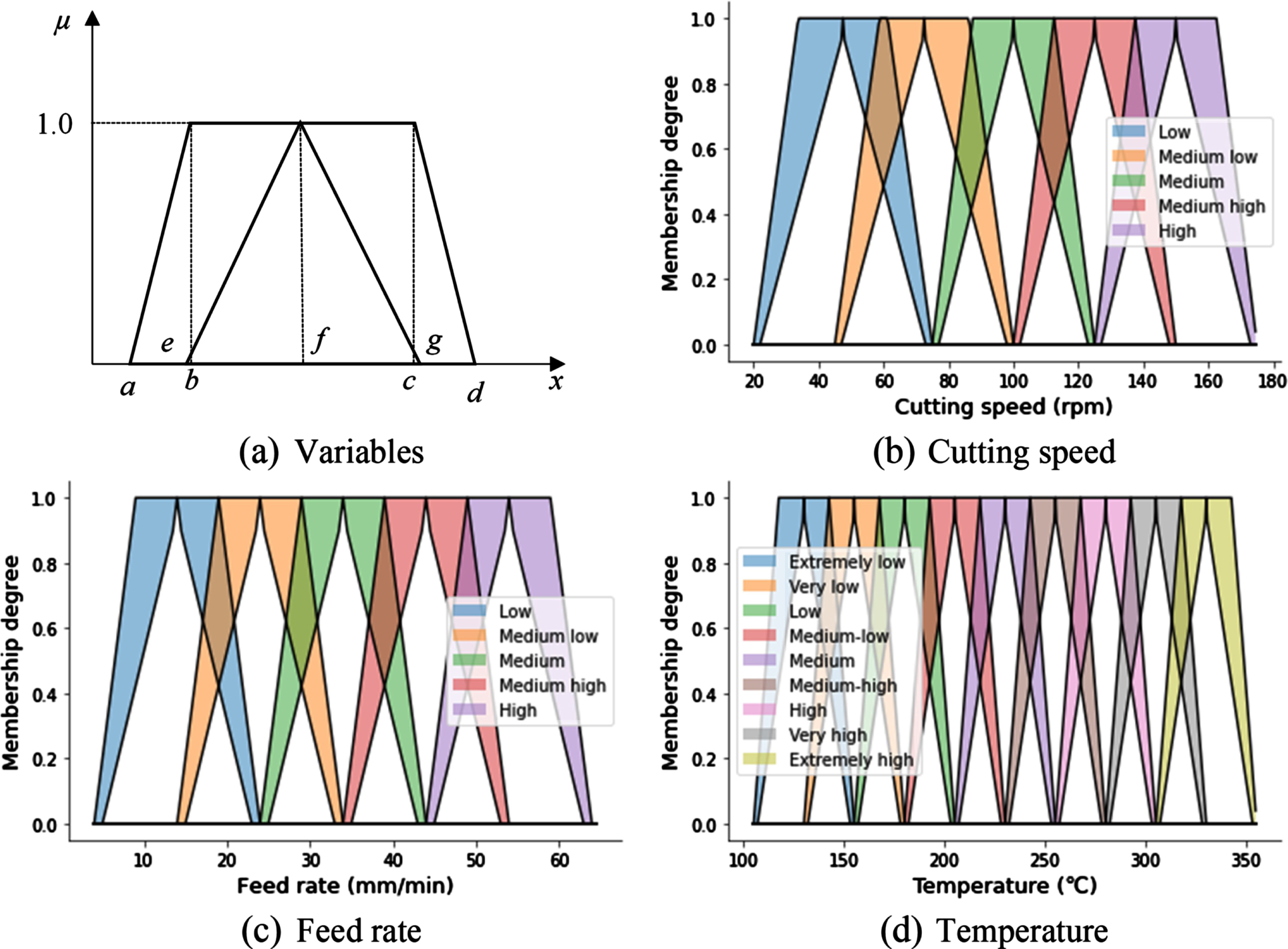
Fuzzy space classification with TTMF.
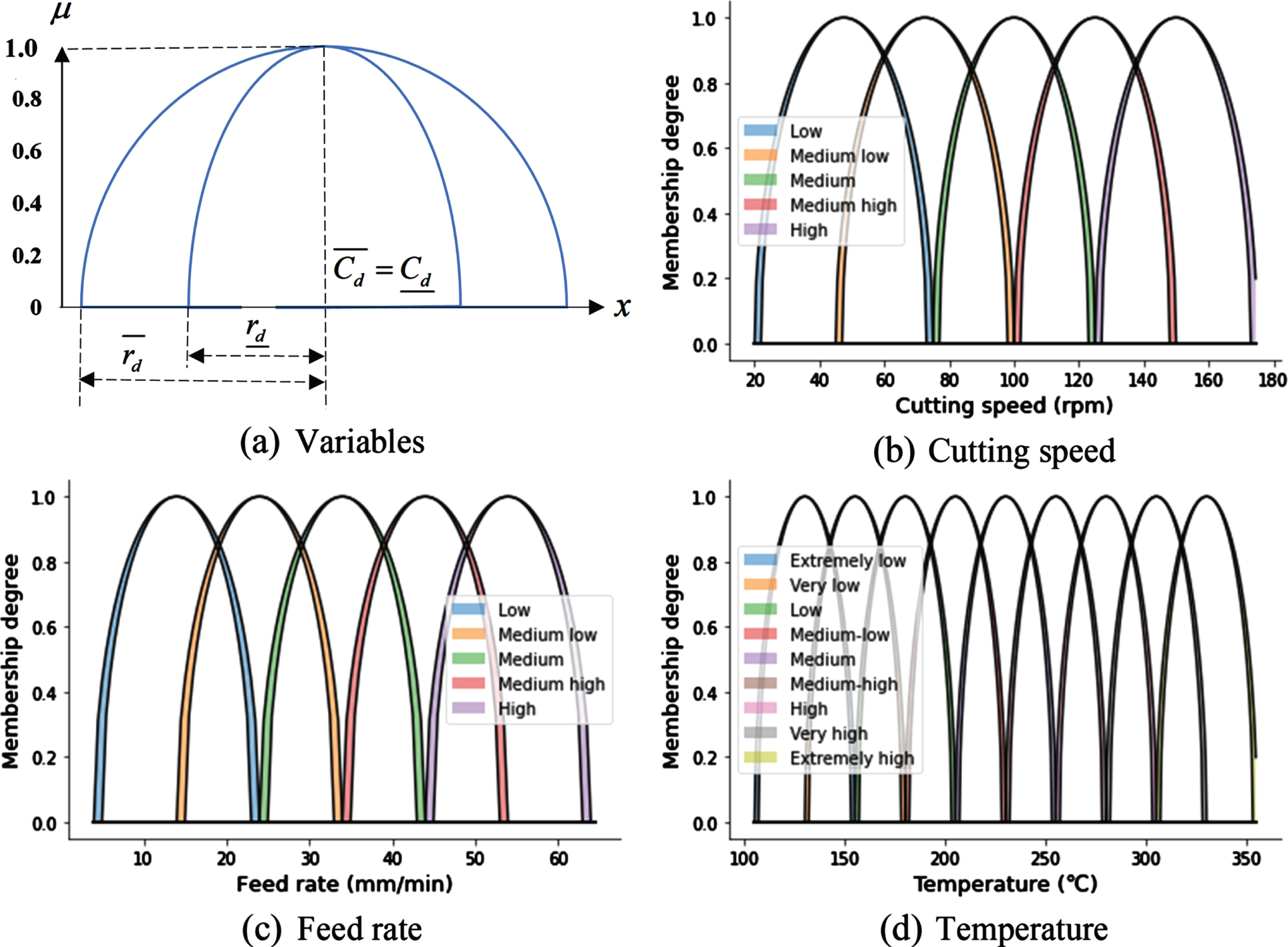
Fuzzy space classification with SEMF.
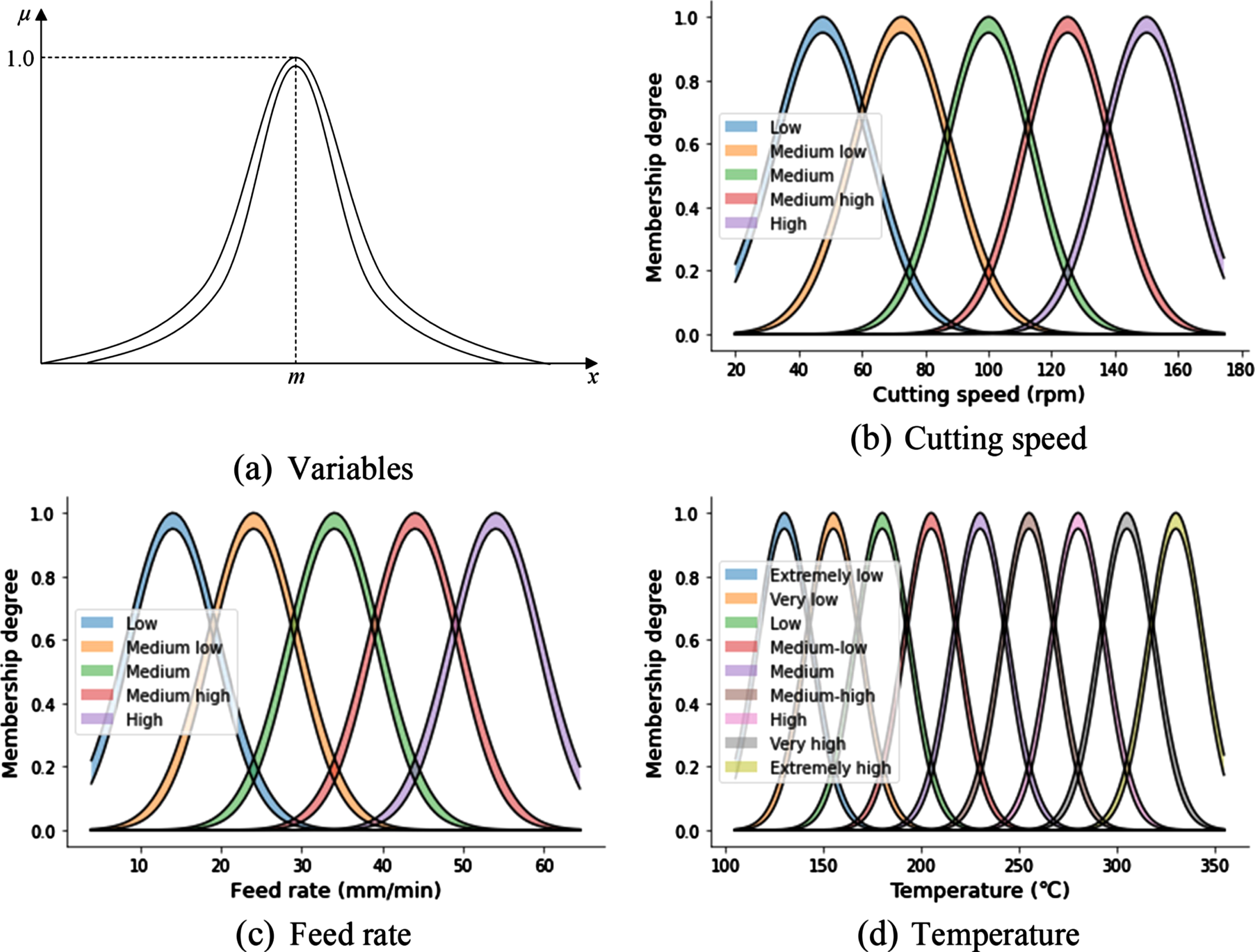
Fuzzy space classification with GMF.
The fuzzy space controller can be trained by knowledge and a model-driven approach. In a knowledge-driven approach, linguistic variables are defined to specify the state of the parameters. Table 2.3 shows the 25 IF-Then rule, which trains the fuzzy controller for predicting the temperature of a drilling operation.
Rule base of IT2FLS
Rule base of IT2FLS
The type reducer in IT2FLS plays vital role in reducing the dimension of MF in a fuzzy set. The error rate produced in the defuzzified output depends on the type-reducer used. The type-reduction schemes available are; (i) centroid type reduction method, (ii) COS TR method, (iii) center of sums type reduction method, (iv) height type reduction method, (v) modified height type reduction method, (vi) “Wu-Mendel” uncertainty bounds, and many more. For the present study, COS TR and “Wu-Mendel” uncertainty bounds have been considered, which is widely used by researchers and available in literature.
The key variables of MFs
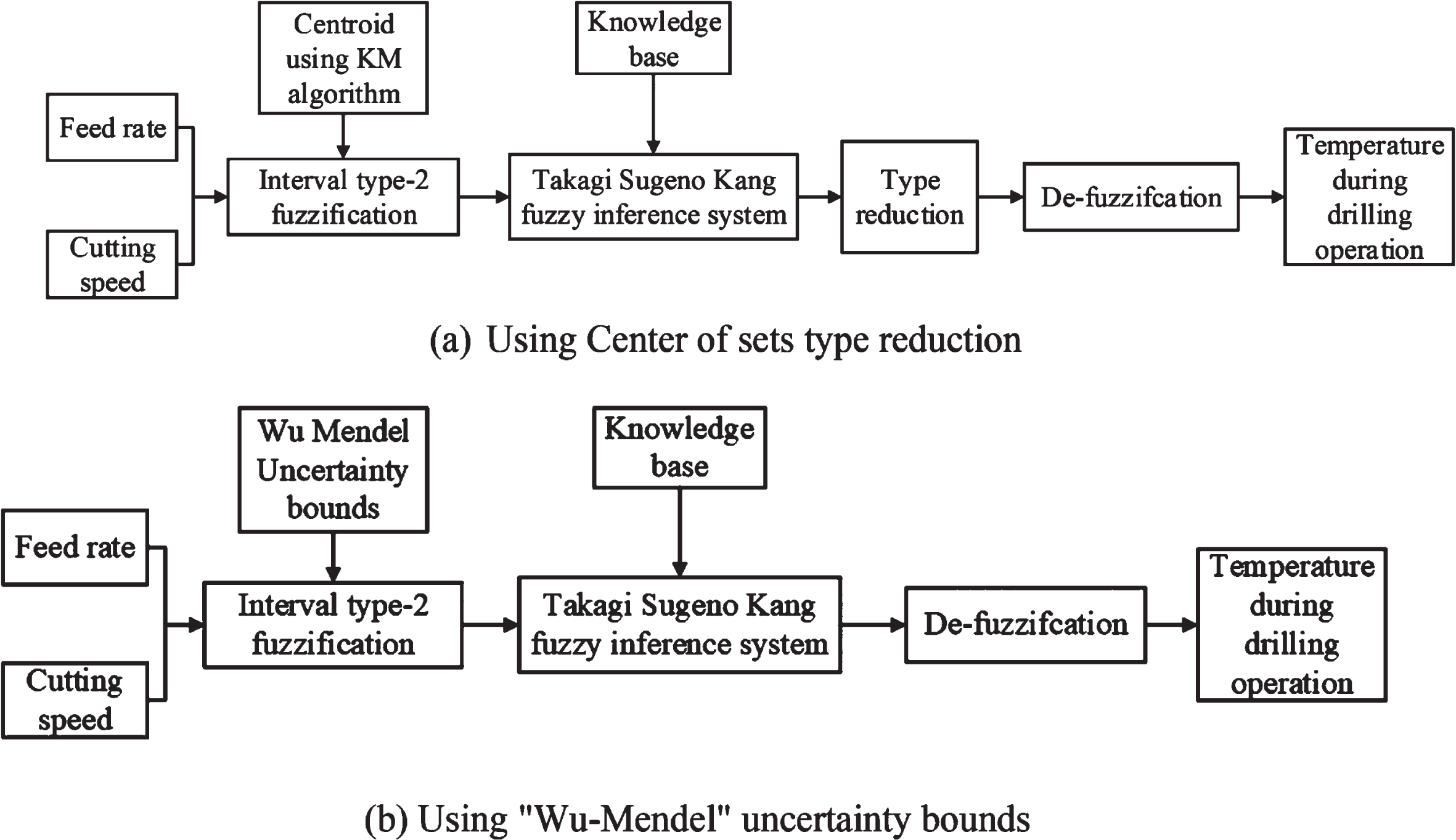
An effective MF can be proposed based on the key variables. [27] considered twelve key factors for choosing GMF or TMF, and these factors can be extended further for SEMF and TTMF. Still, many aspects such as monotonicity, stability and control performance have to be explored further. In a type-2 fuzzy logic controller, fuzzification plays the significant role in estimating the governing parameters. Hence, controller’s efficiency is based on the suitable MF considered. The following sub-sections describe the key variables considered to find the right MF for the drilling operation. The workflow of IT2FLS with COS TR and “Wu-Mendel” uncertainty bounds are used to estimate the temperature raised during the drilling operation is shown in Fig. 7.
Architecture of IT2FLS.
The shape of MFs is defined based on the geomentric parameters such as the boundary points of TrMF, TMF, and TTMF, the mean (μ) & standard deviation (σ) of GMF, and the centre & radius (Cd, rd) of SEMF. In this work, all these parameters have been defined based on the datasets avaliable in [1]. Other schemes such as back-propagation or evolutionary algorithms can also be used [27]. The particular MF, which has fewer parameters, is generally preferred to reduce the computation load. In this case, both GMF and SEMF are found to be the better options as they have only two parameters to represent their shape.
Adaptiveness
Adaptiveness is a distinct feature found in IT2FLS as the embedded T1FLS used to compute the bounds of the type-reduced interval change as input changes [27]. Also, the MF should have the adaptability of reducing from two-dimensional fuzziness to one dimension. In this work, the FoU is defined with UMF and LMF using KM algorithm. The boundary values of LMF and UMF of the MFs are shown in Table 3, and 7. The “novelty” feature as highlighted by [27] is also considered in this work as the MFs used are capable of computing the bounds of both UMF and LMF concurrently.
Upper and Lower Membership Function of TrMF-IT2FLS
Upper and Lower Membership Function of TrMF-IT2FLS
Upper and lower membership function of TMF-IT2LFS
Upper and lower membership function of TTMF-IT2FLS
Upper and lower membership function of SEMF-IT2FLS
Upper and lower membership function of GMF-IT2FLS
The computation has been performed in Python 3.7, Spyder 4.2.5 platform using PyIT2FLS toolbox and the work station is Lenovo think station P330 with Windows 10 OS, Intel Xeon processor and 16 GB RAM. The results obtained based on the two type reduction methods, and the comparison are discussed in this section.
Prediction of drilling temperature: Wu-Mendel type-reduction
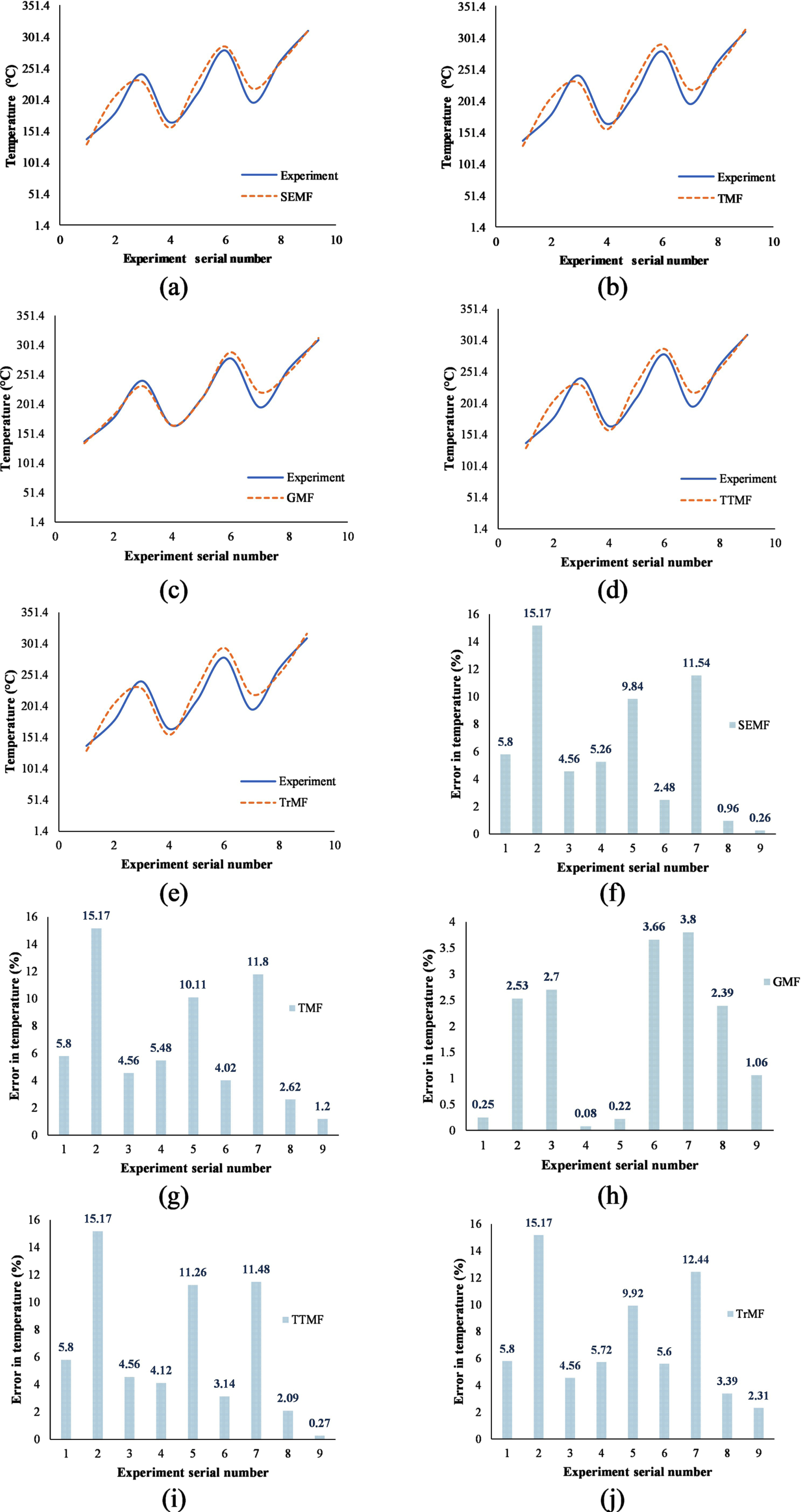
The temperature has been predicted using IT2FLS with five different MFs based on “Wu-Mendel” uncertainty bounds, and the results are shown in Fig. 8. In TMF/TTMF/TrMF, higher error rate is found in second, fifth, and seventh experiments and the associated values are 15.17% /15.17% /15.17%, 10.11% /11.26% / 9.92%, and 11.8% /11.48% /12.44%, respectively. Correspondingly, the minimum error rate found in sixth, eighth and ninth experiments are 4.02% /3.14% /5.6%, 2.62% /2.09% /3.39%, and 1.2% /0.27% /2.31% respectively. Similar behaviour is also found in SEMF, which has higher error rate of 15.17%, 9.84%, and 11.54% in second, fifth, and seventh experiments, and minimum error rate of 2.48%, 0.96%, and 0.26% in sixth, eighth, and ninth experiments respectively. GMF has the highest error rate (12.88%) in seventh experiment compared to all other MFs.
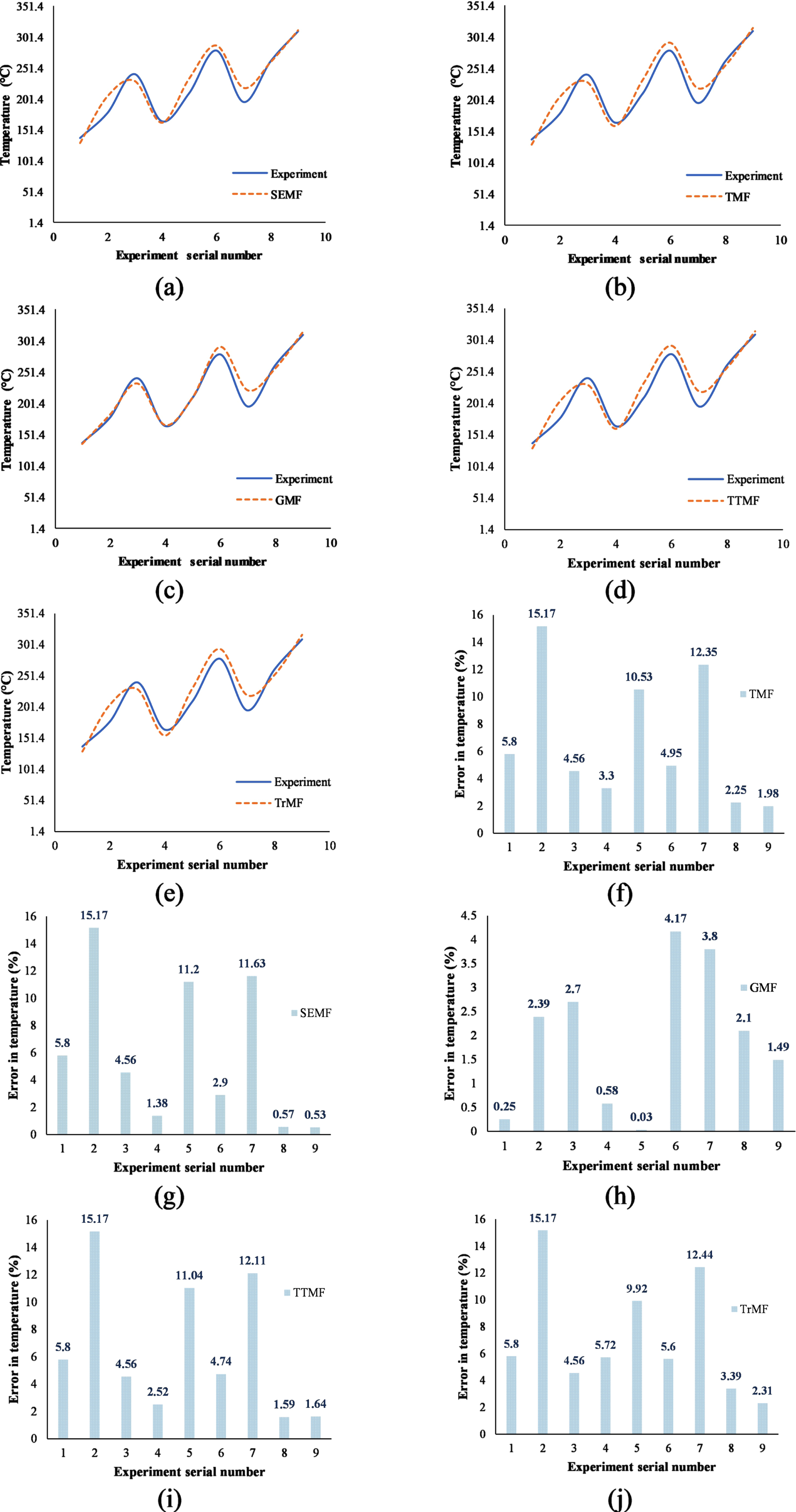
Results of SEMF, TMF, GMF, TTMF & TrMF with “Wu-Mendel” uncertainty bounds type reduction (a,b,c,d,e) and the corresponding error rate in temperature (f,g,h,i,j).
Experiment has also been conducted based on COS TR method for all the five MFs, and the results obtained are shown in Fig. 9. For GMF, the maximum error found is 12.88% in the seventh experiment. For SEMF, the higher error rates found are 15.17%, 11.12%, and 11.63% in second, fifth, and seventh experiments respectively. The corresponding minimal error rates obtained are 1.38%, 0.57%, and 0.53% in fourth, eighth, and ninth experiments respectively. TMF, TTMF, and TrMF also have higher error rates in second, fifth, and seventh experiments (15.17% /15.15% /15.17%; 10.53% /11.04% /10.1%; 12.35% /12.11% /12.61%).
Results of SEMF, TMF, GMF, TTMF & TrMF with COS TR (a,b,c,d,e) and the corresponding error rate in temperature (f,g,h,i,j).
The results obtained based on the tow type-reduction methods; “Wu-Mendel” uncertainty bounds and COS TR method as mentioned above are compared to quantify the prediction rate and presented in Table 8 and Fig. 10. SEMF and TTMF are the new MFs that have been explored further by considering the key variables of MF and the method of type-reduction. Both type-reductions (Table 8) have shown similar results, and all the five MFs have compatibility to adopt the two different type-reductions. Except SEMF, other four MFs have shown similar error rate in both type-reductions, whereas SEMF has shown slight variations of 6.21% using “Wu-Mendel” uncertainty bounds and 5.97% for the COS TR method.
Average error values (%) of drilling temperature
Average error values (%) of drilling temperature
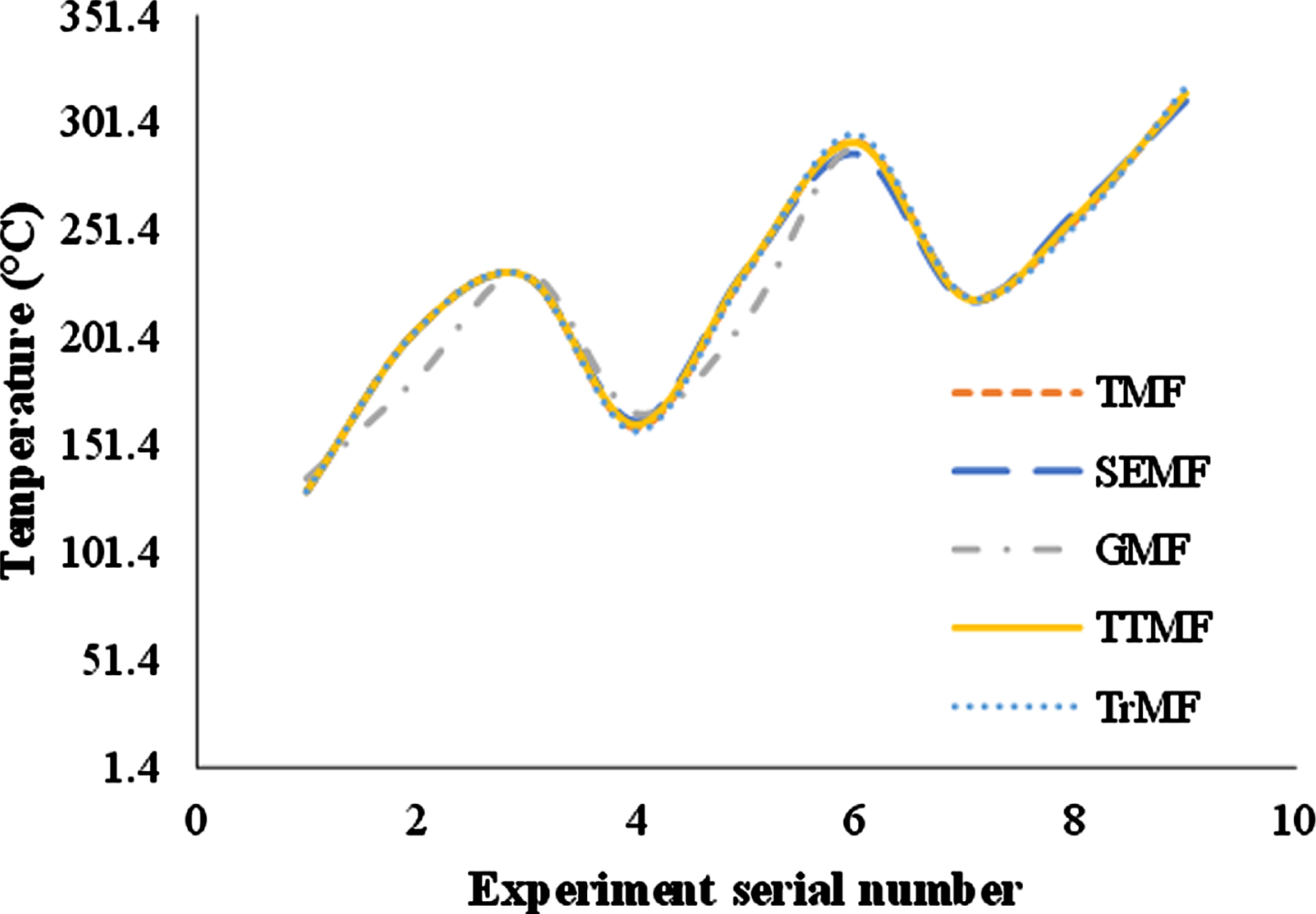
Comparison of all membership function results of COSTR.
Type reductions in IT2FLS are always a trade-off in computation complexity for improving the accuracy rate. In contrast, it gives more computation load due to secondary-level fuzziness in the fuzzy space. Hence, Mendel [28] has proposed two ways of formulating IT2FLS using COS-TR and “Wu-Mendel” uncertainty bounds. COS-TR combines the centroid and KM algorithms to perform fuzzification, and their results with all five MFs are shown in Fig. 10. In “Wu-Mendel” uncertainty bounds, which have four lower and upper bounds for both left and right bounds, their results based on five MFs are shown in Fig. 11. In COS-TR, the time delay is associated with computation, whereas by uncertainty bounds the time delay can be avoided. The comparison between COS TR and Wu-Mendel uncertainty bounds has shown a similar accuracy rate as shown in Fig. 8, 9 and Table 8.
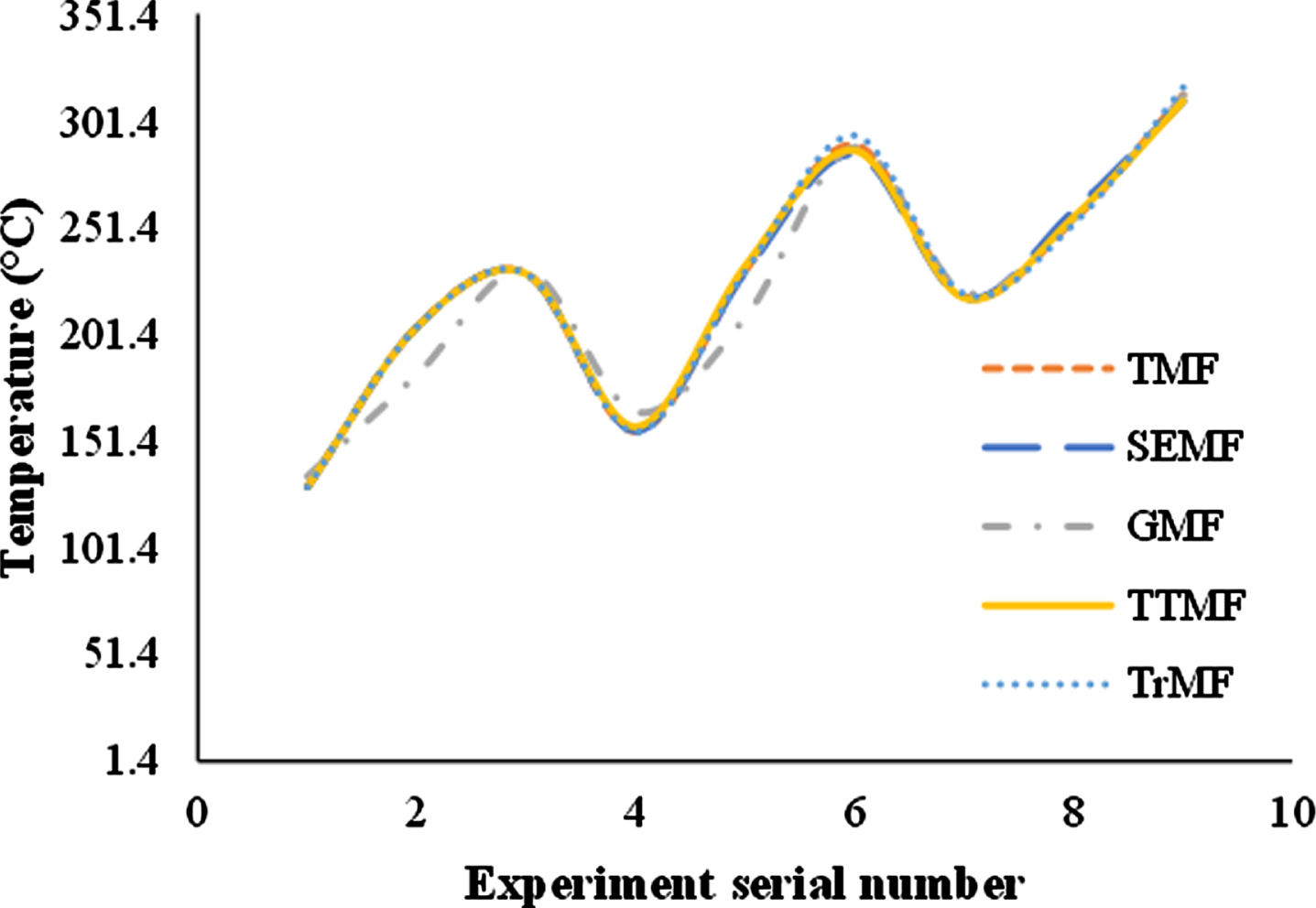
Comparison of all membership function results of “Wu-Mendel” uncertainty bounds.
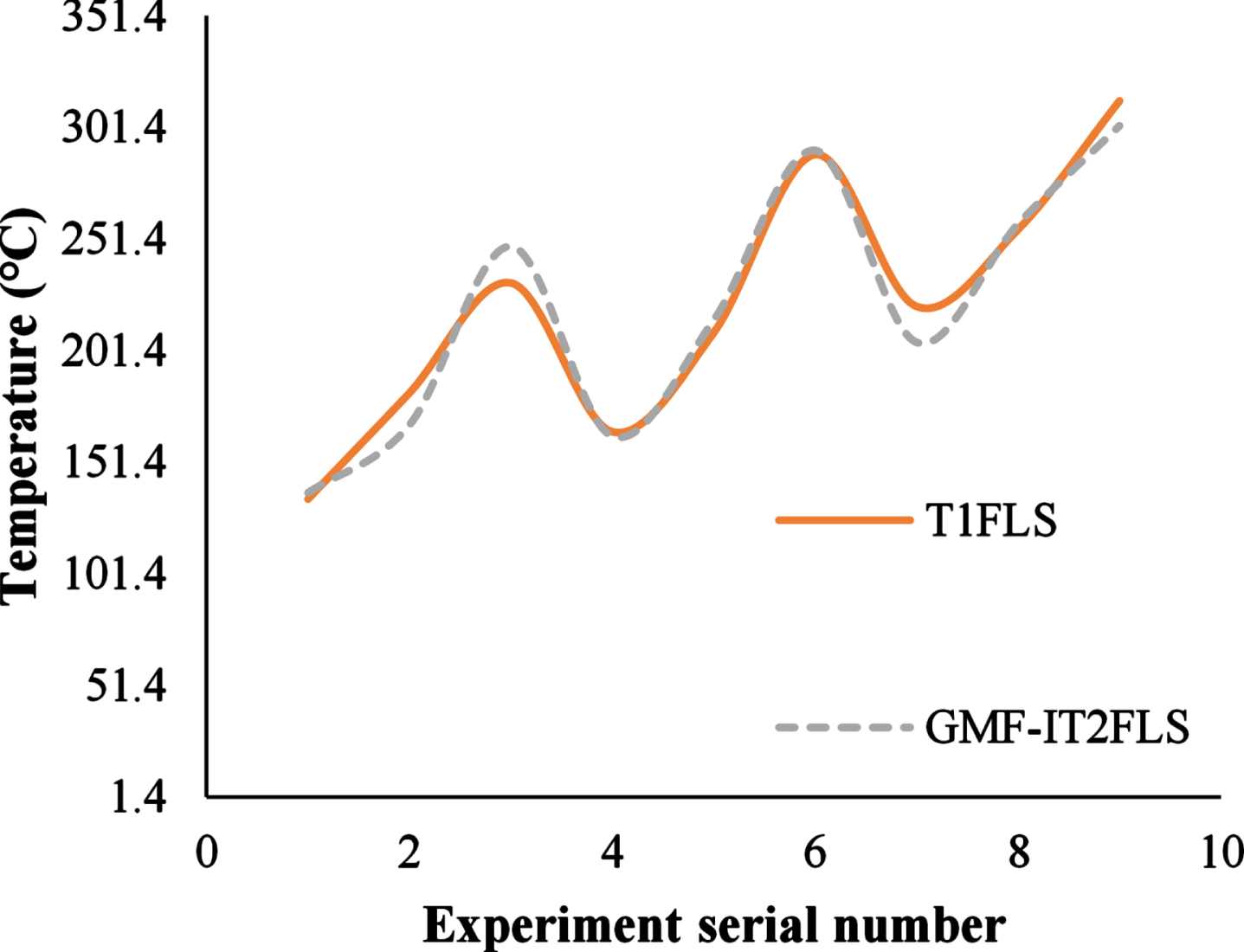
The simulated results are compared between GMF-IT2FLS and T1FLS [1] and presented in Figs. 13. IT2FLS has improved by a 1% average error rate compared to T1FLS because the GMF has given a sensitive response and improved prediction due to geometric characteristics. The IT2FLS has provided secondary fuzziness in the fuzzy space by defining FoU, which invloves data uncertainty. Hence, the accuracy rate has been improved in COS TR and Wu-Mendel uncertainty bounds.
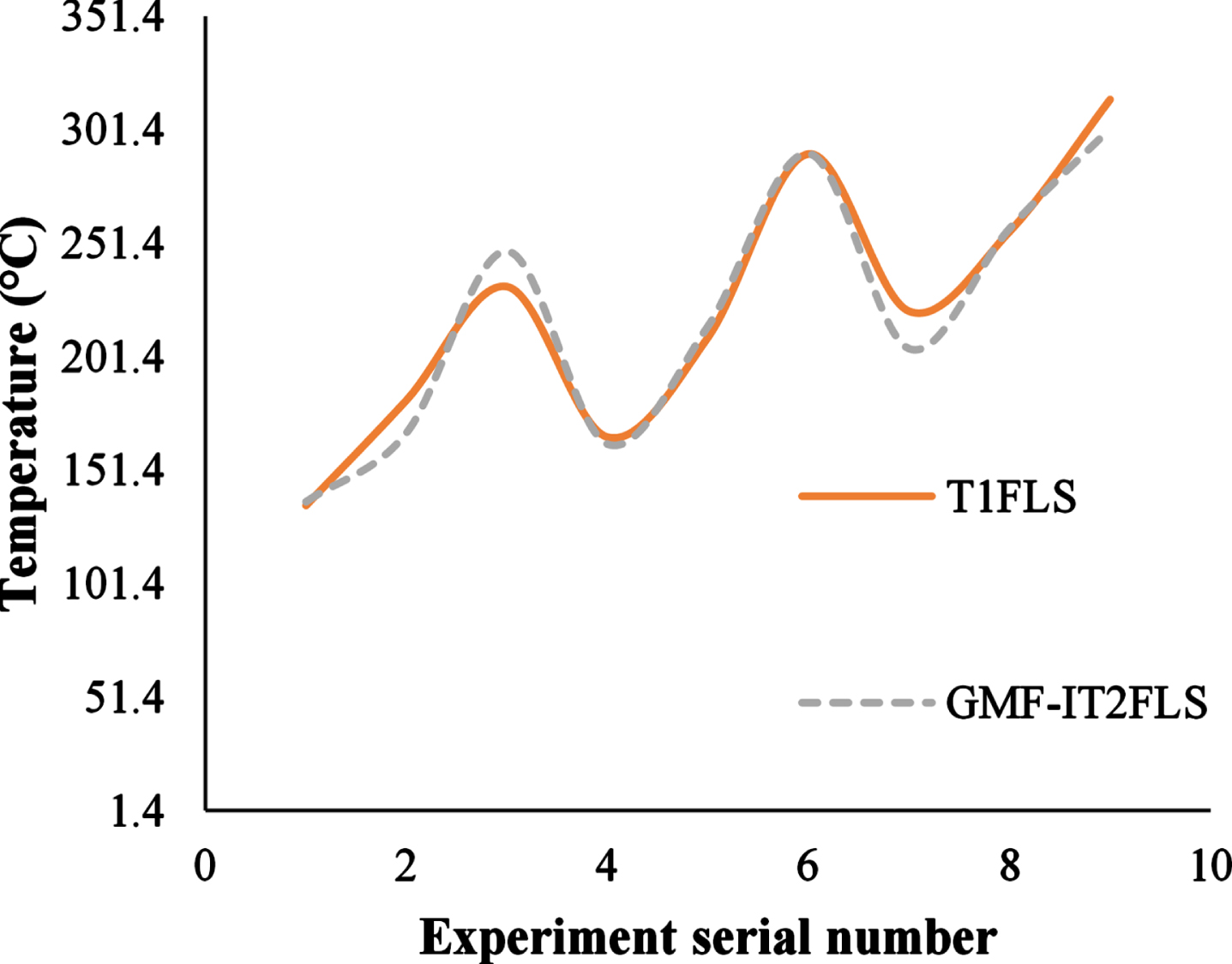
Comparison of GM-IT2FLS (uisng COSTR) and T1FL.
Comparison of GM-IT2FLS (uisng “Wu-Mendel” uncertainty bounds) and T1FLS.
In this work, the influence of MFs in IT2FLS with COS-TR and “Wu-Mendel” uncertainty bounds with the application of real-time drilling operation has been performed, and their results are compared with T1FLS [1]. The outcomes of the study are summarised and presented below An attempt has been made to introduce a new Trapezoidal-Triangular Membership Function (TTMF) and its performance is found to be better than TrMF and TMF. However, it underperforms when compared to SEMF and GMF. Computation in IT2FLS using COS TR and “Wu-Mendel” uncertainty bounds has a different strategy, whereas the uncertainty bounds formulation has given the advantage of reduction of time delay in computation of IT2FLS. The MF having lesser parameters like GMF and SEMF has a higher accuracy rate than TrMF, TMF, and TTMF. Formulation of IT2FLS using uncertainty bounds can be replaced in place of type reductions, which proved as equal substitution in place of type-reduction. The results confirmed that the IT2FLS with GMF in both COS TR and “Wu-Mendel” uncertainty bounds has improved by 1% average error rate than the T1FLS [1]. In addition, the GMF, along with the “Wu-Mendel” uncertainty bound and COS-TR method, is the best option compared to all others. The formulation of IT2FLS can be performed in two ways by using COS TR and “Wu-Mendel” uncertainty bounds. IT2FLS with “Wu-Mendel” uncertainty bounds has shown little better performance than COS TR. The MFs can also be defined in terms of parameters associated with variable-gain nonlinear controller, which remains unexplored for SEMF and TTMF. The performance can be further studied based on the combination of MF, like trapezoidal with Gaussian, trapezoidal with semi-elliptic, and so on. Such a kind of membership may perform well in the prediction of uncertainties.
The future research directions are:
Footnotes
Acknowledgements
The authors sincerely thank the Ministry of Electronics and Information Technology (MeitY), Government of India, for providing financial assistance under Visvesvaraya Ph.D. (MEITY-PHD-1558) scheme to carry out this research work at IIITDM Kancheepuram, Chennai, India