
Abstract
In this paper, to solve the current problems of water quality pollution of rivers, such as multiple types, high toxicity and difficult degradation, we design an intelligent surface mobile robot based on the slow release of microorganisms. In the robot, the skeleton has a ship-type structure welded with stainless steel equilateral angle steel; the function module comprises a power supply part, motor part, transmission part, and release part; the wireless monitoring module is based on GPRS and EtherCAT networking technologies and consists of four submodules, including a data acquisition submodule, transmission submodule, database server and monitoring center. The field test results show stable overall transmission performance and wireless data transmission performance of the robot. When the water depth of the rotating cylinder is 0.3 m, and the speed of the rotating cylinder is 15 r/min, the pollution control ability of the robot is outstanding. The experimental results also verify the feasibility of the robot in treating water pollution. The robot can greatly improve the mechanization, automation and efficiency of water pollution control and facilitate the centralized monitoring of joint operations, so it is worth popularizing.
Introduction
Recently, most rivers in China have become increasingly polluted. According to the authoritative survey on the pollution degrees of 532 rivers by the Ministry of Water Resources of the People’s Republic of China, nearly 80% of water and 45% of the groundwater in China have been polluted [1, 2, 3]. The main pollution sources are industrial wastewater, agricultural wastewater, garbage, acid rain in cities, and overfishing. The variety, toxicity and non-biodegradability of polluted water resources have always been challenges for river pollution [4, 5, 6, 7]. Currently, throughout the world, most of the research on equipment for river pollution control is focused on surface garbage-cleaning robots. Such mechanical cleaning is not only inefficient but also not conducive to the rapid improvement of water quality [8, 9, 10, 11]. To solve this problem , we researched and developed an intelligent surface mobile robot based on microorganisms. The robot can release the water-dissolvable microorganisms into the polluted rivers slowly so that the solution can fully react with the pollutants to manage river pollution.
Modeling the overall structure of the robot
A module design is adopted for the intelligent surface mobile robot according to its purpose and working environment. It includes a robot function module, framework and wireless monitoring module. We use Inventor software for the intelligent surface mobile robot. Its structural modeling and function module diagram are shown in Figs 1 and 2, respectively. The function module a power supply part, motor part, transmission part and release part. To enhance the adaptability of the robot. A DC motor is adopted in the motor because it can meet the rotating speed. The solar panels charge the battery to continuously supply power to the DC motor [12]. We use sliding bearings in the transmission part.
Structural modeling of the intelligent surface mobile robot.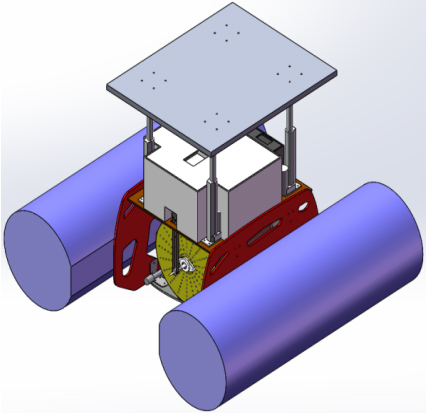
Structure diagram of the robot function module.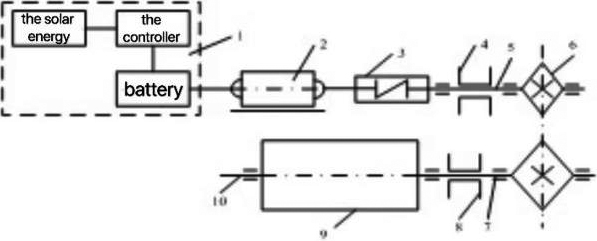
The release part contains a rotary cylinder with holes of 1 mm diameter evenly distributed on its surface. One end of the rotary cylinder is connected to the output shaft for positioning. The robot frame is welded with stainless steel with equal corners. The whole device includes solar panels, power boxes, motor protection measures and a floating ball positioning unit. From the point of use [13]. The wireless monitoring module is based on GPRS and EtherCAT Internet technologies. It is composed of four submodules, including a data acquisition submodule, transmission submodule, database server and monitoring center [14].
Kinematic theory
The intelligent surface mobile robot can use the rotating cylinder to rotate around the output shaft in a uniform variable direction. This movement is the rotation of a rigid body around a fixed axis. When the rigid body rotates, rotation
We can calculate the angular velocity and Angle of the rotating cylinder at a certain time by calculating the angular velocity and Angle of a particle on the rotating cylinder.
Since any point in the rotating cylinder moves in a circular motion around the axis, with the center of the circle on the axis and the plane of the circumference perpendicular to the axis, it is appropriate to use the natural method to study the motion of each point on the rotating cylinder [15].
According to the designed known conditions, the microbial density
Calculation of the new centroid system
Analysis process: when the rotating cylinder is empty, for a homogeneous rotating cylinder, its center of mass
If a uniform microbial solution fills the rotating cylinder, the center of mass of the whole rotating cylinder should also be on the center line of the output shaft.
At this time, the microbial solution is required not to fill the rotating cylinder, leaving a certain height of free space. When the rotating cylinder rotates, the overall center of gravity inevitably shifts from the original center of mass to form a new center-of-mass system.
If only the microbial solution in the rotating cylinder is considered, the microbial solution should also have its center of mass
According to the analysis, the new mass system must be between the center of mass
The analysis of the centroid of the transverse section of the rotating cylinder is shown in Fig. 3, and the quantitative analysis of the centroid of the transverse section is shown in Fig. 4.
Barycenter analysis of the rotating cylinder.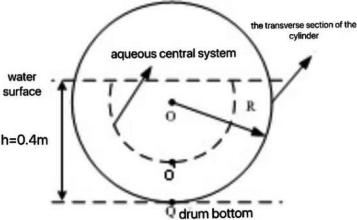
Quantitative analysis of the barycenter.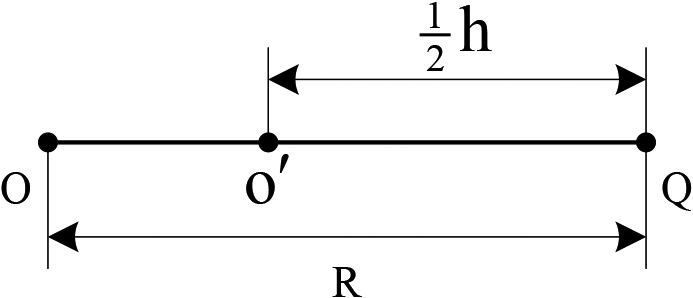
It can be seen from Figs 3 and 4 that the distance between two centers of mass can be expressed by
According to the principle of centroid balance,
Analysis process: 100 kg of microbial particles are put into the drum, and the drum is placed into water. Due to holes in the external surface of the drum (the hole diameter is less than the particle length), water can enter the drum and mix with microbial particles. Due to the effect of the floating ball, the drum can float on the water surface. Under the action of atmospheric pressure, the level of the solution in the drum can remain at the same level as the water surface.
It is assumed that
Then, the transverse surface area of the microbial solution in the rotating cylinder can be expressed by
The mass of the microbial solution in the rotating cylinder during mixing can be estimated by
Through the above analysis, the values of x and y can be solved. The value of
The momentum theorem
The rotating cylinder moves around the output shaft in a uniformly variable circle. The external force acting on the particle system can be calculated using the momentum theorem of the particle system. The momentum of the particle system is
Since the momentum theorem is of a vector form, the projection form should be used in the application. The projection form of the differential form of the momentum theorem of the particle system in the two-dimensional Cartesian coordinate system is dpx /dt = F_x and dpy /dt=F_y.
Calculation of buoyancy of a floating ball
Analysis process: the robot should float on the surface with a water depth of about 0.4 m. Based on the analysis of the working force of the robot on the surface, using the volume of the drum water as the drainage volume when the robot is working, we can calculate the minimum pressure that the floating ball should bear under the condition of bearing the maximum buoyancy to determine the size of the floating ball.
It is assumed that the gravity of the robot at work is
The analysis of the buoyancy of the robot is as follows:
According to Eqs (9), (10) and (11), we can calculate the maximum buoyancy to be borne by the robot in the floating state
The analysis of the buoyancy of the floating ball is as follows:
The mass
Analysis process:
According to the equation
For a solid circular shaft, the output shaft diameter
where
Since the keyways on the output shaft can weaken its strength, the value of the actual diameter of the output shaft
According to the requirement that rotating cylinder is 1–20 r/min, rotating speed of the rotating cylinder can be initially determined to be
According to the two indexes of
The comprehensive size data of the intelligent surface mobile robot is shown in Table 1.
Size integration data (
10 r/min,
56 kg)
Size integration data (
Working principle of wireless monitoring data transmission.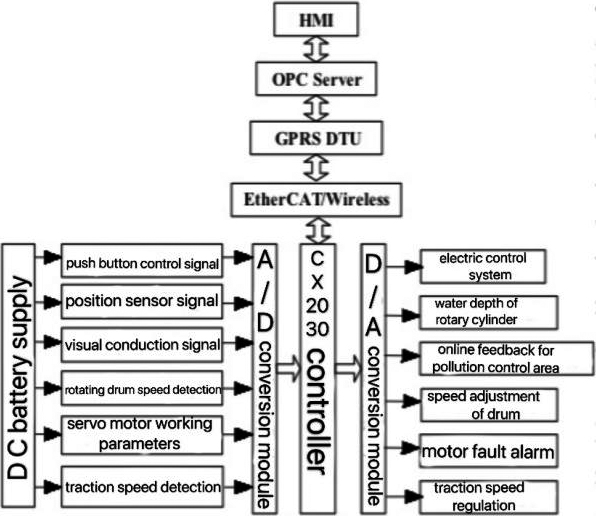
The power supply part, motor part and transmission part are important components, and the power supply, motor, coupling, bearings and the sprocket chain are the main components.
According to the comprehensive size data of the intelligent surface mobile robot, the models and performance parameters of the main components can be reasonably selected through calculation. The comprehensive analysis of the performance of the robot indicates that the normal operation of the intelligent surface mobile robot can be satisfied. The selection of the main components in Table 2.
Selection of the main components
Selection of the main components
In the intelligent surface mobile robot, a modular design is adopted. The upper computer communication is based on GPRS DTU and TCP/IP data communication function, the real-time communication of the OPC server and GPRS DTU is achieved by the TCP/IP protocol, the OPC server has fixed IP addresses, and COMcommunication is used between the wireless OPC server [16, 17, 18, 19].
The speed adjustment of the drum, the traction speed adjustment, the online feedback of the anti-pollution area, the electronic control system and motor fault alarm, the monitoring objects through the position sensor signal, the pulling speed, the detection signals of the drum speed, the visual conduction, the button control signals and the servo motor working parameters on the BECKHOFF CX2030 controller and module under the action of the real-time data transmission [20]. The EtherCAT control bus and GPRS networking technologies are used for real-time wireless monitoring of the robot [21]. The working principle of the wireless monitoring data transmission is shown in Fig. 5.
Field test
The test environment
The field test of the intelligent surface mobile robot was performed at the experimental base in Xialing District, Huangshi City. The tested object was the polluted water in the river. The microorganisms were released slowly to fully react with the polluted water so as to achieve the goal of governance and improvement of water quality.
The test area is about 1000 m2 and has been polluted seriously with an average pH value of
Field test of the intelligent surface mobile robot.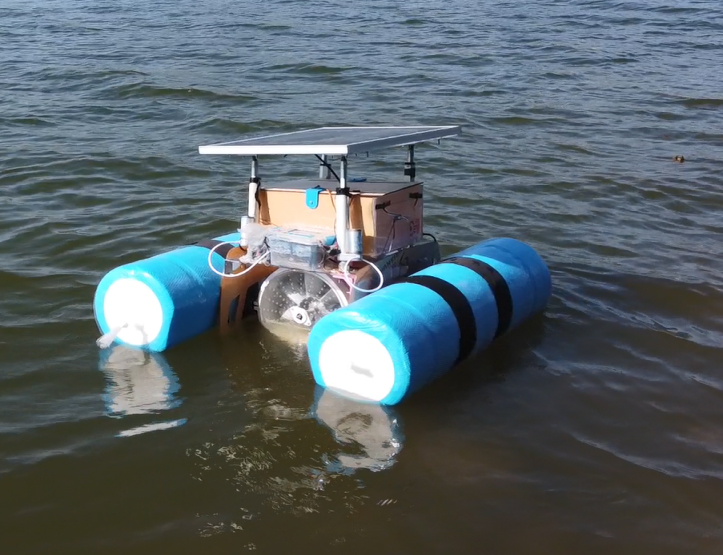
In order to prevent excessive rotary torque caused by too large traction speed or rotary depth, the traction speed and rotary depth need to be tested to the maximum depth into water. The intelligent surface mobile robot starts to work driven by the traction speed. In case of a fault alarm, to prompt to stop the operation. The workflow of the wireless monitoring is shown in Fig. 7.
Test results of the robot
Test results of the robot
Workflow of the wireless monitoring of the robot.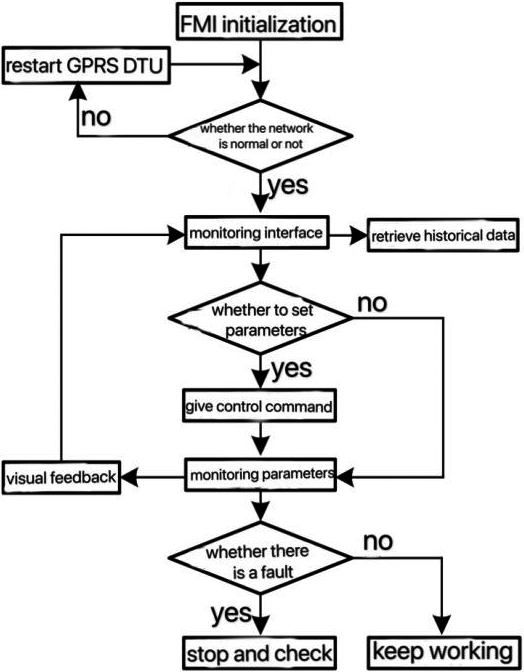
To pollution control ability of the intelligent surface mobile robot in the field, the whole test process can be divided into three groups.
Test I: the depth of the rotating cylinder into water is 0.2 m, and the drum speed is 10, 15, 20 r/min.
Test II: the depth of the rotating cylinder into water is 0.3 m, and the drum speed is 10, 15, 20 r/min.
Test III: the depth of the rotating cylinder into the water is 0.4 m, and the drum speed is 10, 15, 20 r/min.
In the test process, the depth into water and drum speed are automatically adjusted online, and the test periods of the three tests are the same. The ability and working efficiency are comprehensively reflected through the comparison of water pollution and the average pH values.
The capability of the system can be alerted by the drum rotation.
Test results
After repeated tests, the normal distribution of each test result was obtained. Pollution control test results in Table 3.
The test results indicate the stable performance of designed intelligent surface mobile robot.
When the depth of the rotating cylinder into water was 0.3 m, and the drum speed was 15 r/min, the pollution control ability of the robot was outstanding.
When the depth of the rotating cylinder into water was 0.4 m, and the drum speed was 20 r/min, monitoring system of the robot raised an abnormal alarm. This phenomenon shows that the operation torque resistance of the, surface needs to be improved, designed structure of the robot still has anti-pollution ability, and the overall transmission performance and wireless monitoring data transmission performance are normal.
Conclusion
In the case of the increasing pollution of rivers, the successful development of the robot contributes to the effectiveness of microorganism treatment of polluted water.
Based on 3D modeling, theoretical analysis, calculation and selection, wireless monitoring data transmission and automatic control, we designed and developed the intelligent surface mobile robot based on microorganisms.
The test results show that the intelligent surface mobile robot can greatly improve mechanization and automation, thus greatly improving the efficiency of water surface pollution control operation and facilitating joint operations.
The robot has stable transmission performance, a stable structure, outstanding pollution control ability It is convenient to install and has a wide prospect of popularization and application.
Footnotes
Acknowledgments
This work was supported by the Key Projects of Hubei Provincial Natural Science Joint Innovation Fund (No. 2023AFD002).