
Abstract
This paper proposes a photovoltaic (PV) dynamic maximum power point tracking algorithm based on improved PSO (particle swarm optimization) optimization in response to the problems associated with low tracking accuracy, poor immunity, and the ease of falling into local optimization, as well as the failure of the traditional MPPT algorithm (maximum power point tracking algorithm) under partial shading conditions. Firstly, three traditional MPPT algorithms are compared and analyzed, followed by simulation testing under standard and partial shading conditions. The advantages and disadvantages of three traditional algorithms are analyzed. Secondly, it is proposed that dynamic inertia weights and learning factors be applied synchronously during the optimization process in order to speed up the tracking speed of particle swarm optimization. In order to evaluate the effectiveness of different algorithms, it is best to simulate them under static and dynamic conditions. In comparison to the standard particle swarm algorithm and three other traditional algorithms, the proposed algorithm is capable of tracking the maximum power point quickly and accurately under conditions of uniform illumination and static and dynamic partial shading. There is a faster convergence speed as well as a greater degree of accuracy at steady state.
Introduction
Recently, there has been a significant interest in developing and utilizing photovoltaic power stations in China due to adjustments made to the energy structure [1]. A growing number of photovoltaic power stations are being integrated into the power grid. The output power of photovoltaic cells depends on the light intensity. Under normal lighting conditions, there is only one peak point in the P-V curve of photovoltaic cells, i.e., the maximum power point (MPP). However, in practical operation, due to the influence of clouds, an ash layer, and buildings, photovoltaic components will receive uneven light and produce a partial shading phenomenon, especially when photovoltaic is applied to ships. Due to the fact that ships have mobile bodies, this phenomenon is more apparent [2].
Photovoltaic arrays are controlled by MPPT, which is essentially a global optimization procedure. Traditionally, photovoltaic maximum power point tracking algorithms (MPPT) are suitable only for determining the maximum power point of photovoltaic cells under normal light conditions. These algorithms include constant voltage tracking, disturbance observation, and conductance increment methods. In other words, the output power curve of a photovoltaic cell contains only one peak power point as its maximum power point. In cases where there is partial shading of the photovoltaic array, the output power P-V curve of the photovoltaic cell will show multiple power peak points. Because of their inherent limitations, these traditional algorithms can only perform local optimization, can easily fall into local maximum power points, and cannot complete global optimization. As a result, photovoltaic array output power is reduced [3, 4]. To employ solar energy more efficiently, it is imperative to find a solution to the problem of how to reach the maximum power point of the system under partial shading.
Researchers from domestic and abroad have conducted a large number of effective studies in recent years on multi-peak MPPT control methods under partial shading conditions [5, 6], which mainly focus on two aspects: first, the improvement and combined use of traditional single-peak algorithms [7, 8, 9], such as the improved conductance increment method, disturbance observation modified method, and composite MPPT algorithm. As a result of improvements to traditional algorithms, optimization has improved to some extent, but there is still insufficient accuracy, and there will still be oscillations at the peak. In addition, intelligent algorithms are used to optimize multiple peaks globally. In the literature [10, 11], algorithms based on neural networks are used. The method requires a thorough understanding of the distribution of peak points under different shadow modes as well as a large amount of photovoltaic array data information. Based on the literature [12], a differential evolution algorithm is used, in which only two parameters are set to perform a global efficient search, but the tracking accuracy is not high. Using Fibonacci search algorithms, the literature [13] achieves multi-peak maximum power point tracking.
It is essentially a global optimization problem for MPPT control, with multiple shading peaks, and intelligent algorithms have their own inherent advantages. When it comes to solving nonlinear optimization problems, particle swarm optimization (PSO) has unique advantages. The PSO algorithm has, however, some weaknesses, such as the tendency to fall into local maximum power points during tracking. It also exhibits oscillations after stable output, and to have a slow convergence rate [14, 15, 16, 17].
In order to address the above issues, an improved PSO algorithm is used to optimize the maximum power point of the photovoltaic array under shading conditions. First, we compare and analyze the optimization performance of three traditional MPPT algorithms under standard and partial shading conditions. In addition, a new PSO algorithm is proposed. The state factor is introduced to linearly adjust the inertia weight and learning factor. Second, the superiority of swarm particle optimization is demonstrated in terms of search speed, tracking accuracy, and system stability. Finally, the improved PSO algorithm is compared with the traditional algorithm to verify the effectiveness of the algorithm proposed in this paper. In addition, the economy of different algorithms is quantitatively evaluated, which indicates that the algorithm proposed in this paper is more energy-efficient.
Mathematical model and characteristics of solar cells
Mathematical model of solar cell
In Fig. 1, the equivalent circuit of photovoltaic is shown in accordance with the photovoltaic characteristics.
Photovoltaic equivalent circuit.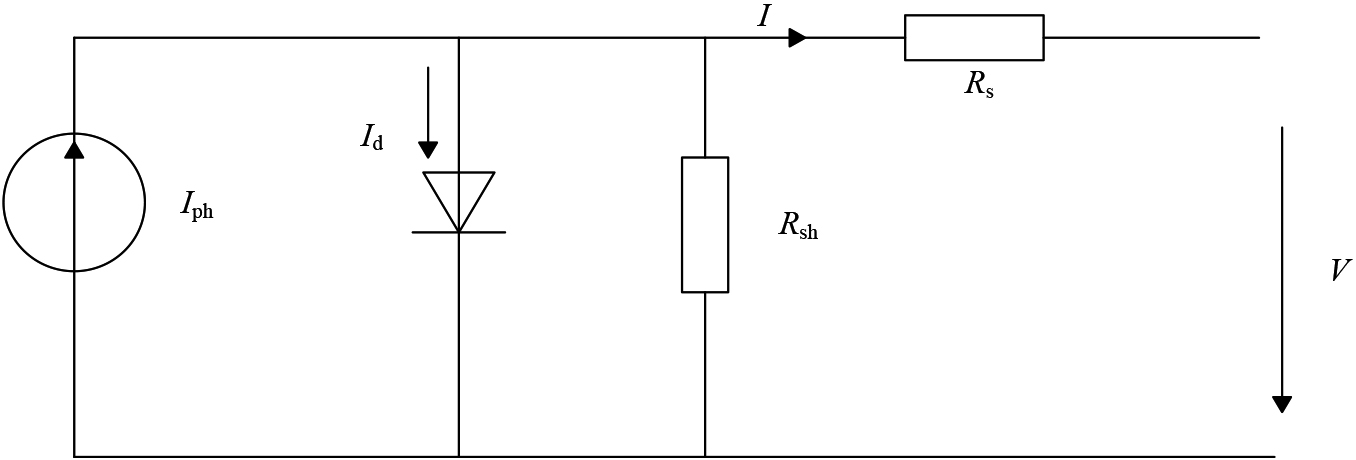
According to the equivalent circuit shown in Fig. 1, the photovoltaic voltammetric characteristics can be obtained, as shown in Eq. (1) [18].
Where,
The Eq. (1) can be simplified from an engineering perspective under standard conditions to the Eq. (2):
When photovoltaic runs at the maximum power point
At the maximum power point of Eq. (3), the coefficients
Based on the research needs of this paper, the focus is primarily on the photovoltaic output power, and the actual output power of the photovoltaic arrays is calculated in accordance with Eq. (5).
In the equation,
Matlab2016B version is used to build the simulation model based on the mathematical model of the photovoltaic cell. As shown in Fig. 2, using laboratory photovoltaic cell parameters, the simulation curve of the photovoltaic cell is shown under uniform light conditions:
Photovoltaic cell characteristic curves under uniform illumination with different light intensities (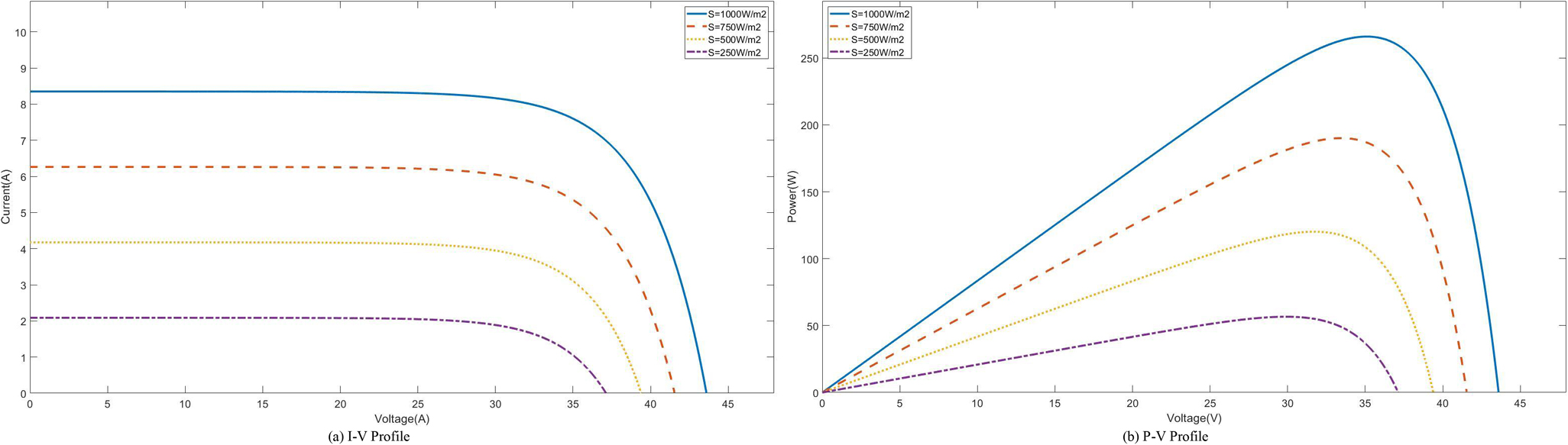
Under uniform illumination, it can be seen from Fig. 2 that the short-circuit current increases with increasing irradiance, and its power characteristics show a single peak.
In practical applications, photovoltaic arrays will be affected by local shading phenomena, such as obstacles, clouds, etc. Using the simulation model built above, taking three solar cells in series as an example, local shading is simulated by changing the light intensity of each cell module. The parameter of each photovoltaic cell are consistent with those in Section 1.2. The light intensity received by the three solar cells is 1000 W/m2, 600 W/m2 and 400 W/m2 respectively. The current-voltage (I-V) characteristic curve and power-voltage (P-V) characteristic curve of the system are shown in Fig. 3.
Photovoltaic cell characteristic curves under partial shading.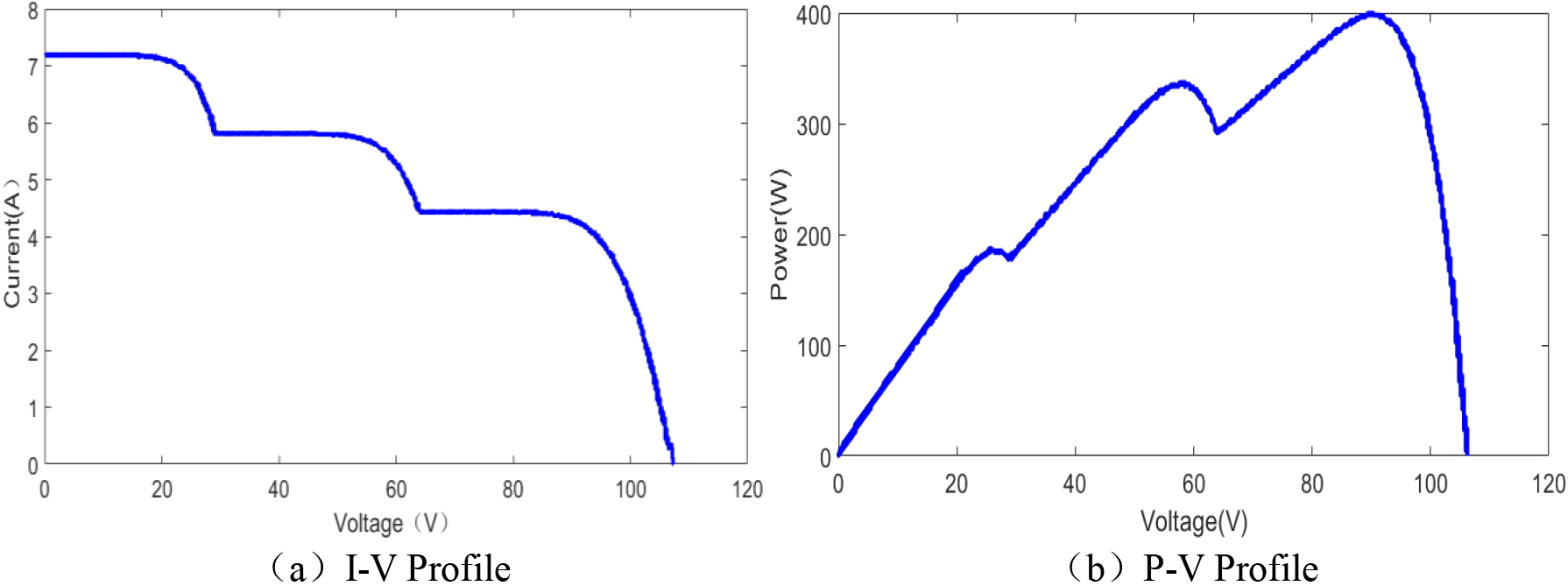
In photovoltaic arrays, local shading often results in multiple extreme points on the output Power-Voltage (P-V) curves of individual solar cell modules, which exhibit multi-peak characteristics, as illustrated in Fig. 3. While the open circuit voltage of the photovoltaic array varies with the light intensity, having multiple open circuit voltages corresponding to multiple peaks of local photovoltaic output power.
It is currently possible to observe disturbances using disturbance observation methods, conductance increment methods, and constant voltage methods. As shown in Fig. 4, the main principles of disturbance observation are illustrated. When the photovoltaic system works at
Disturb-observe method.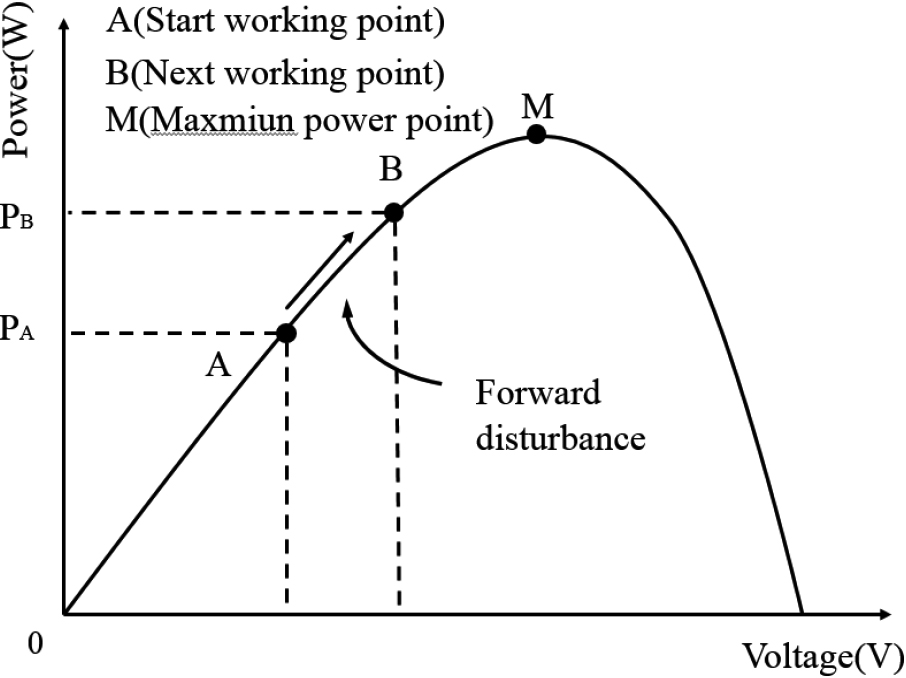
In this paper, four photovoltaic cells are connected in series as an example, assuming the same parameters for each photovoltaic cell, as shown in Table 1.
Parameter table of photovoltaic cells under standard test conditions
Parameter table of photovoltaic cells under standard test conditions
Conductance increment method.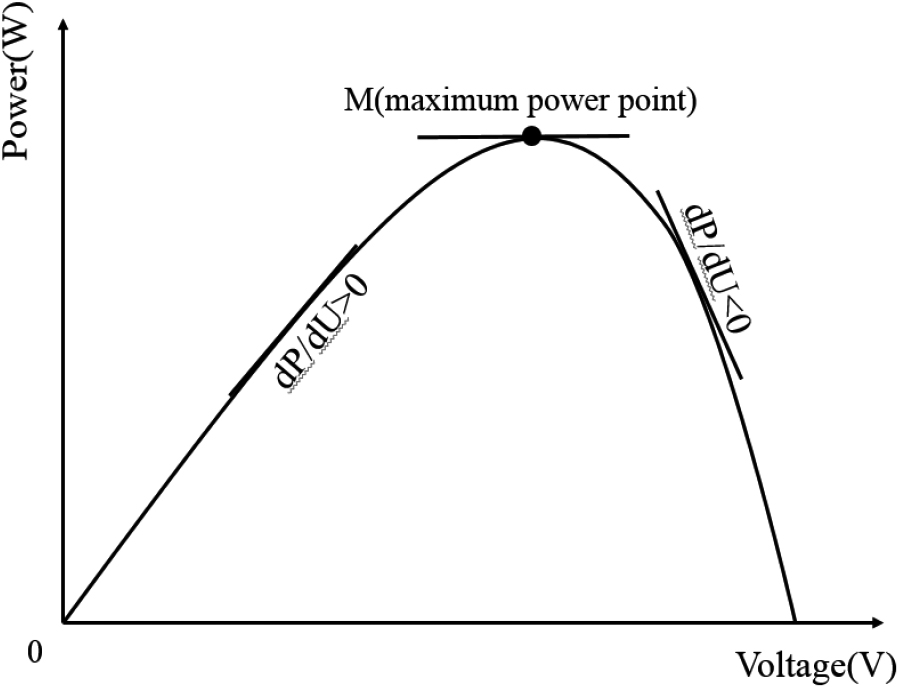
Simulation output characteristic curves of three traditional MPPT algorithms under standard testing conditions.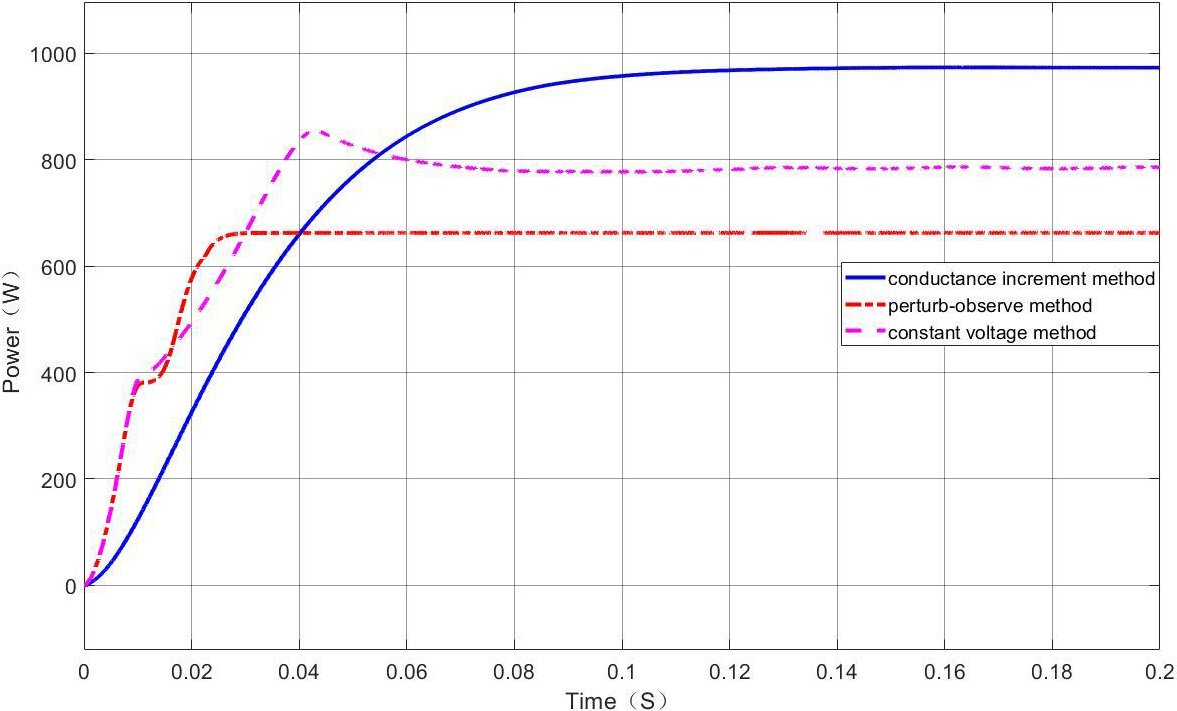
Using the parameters of photovoltaic cells in Table 1, it is possible to obtain simulated output characteristic curves for three traditional MPPT algorithms under standard test conditions, i.e., a light intensity of 1000 W/m2 and a temperature of 25∘C, as shown in Fig. 6.
Based on the simulation characteristic curve shown in Fig. 6, Table 2 shows the relevant output parameters of three traditional MPPT algorithms under standard test conditions.
Output parameters of three traditional MPPT algorithms under standard test conditions
As shown in Table 2, the maximum power obtained by the conductance increment method is the one with the mildest deviation from the theoretical maximum power under uniform illumination of four photovoltaic cells under standard test conditions, with an error of only 0.6%, whereas the error obtained by the perturbation observation method is the largest, reaching 34.6%. However, from a real-time performance perspective, the conductance increment method is the worst, with an adjustment time of 86.3 ms, while the perturbation observation method has the best real-time performance, with an adjustment time of 23 ms.
The operating performance of a photovoltaic system is profoundly affected by its environment, particularly in the context of maritime applications. The mobile nature of ships renders the impact of environmental conditions on photovoltaic systems more pronounced, thereby yielding considerable effects on photovoltaic system output power [19]. This phenomenon is attributable, in part, to diminished solar irradiation received by certain regions of the panel yielding local shading, representing one of its primary manifestations. In this study, four solar cells were employed in series exhibiting particular parametric properties, which are elaborated upon in Table 1. To simulate the effects of partial shading on photovoltaic arrays, Table 3 provides detailed settings for irradiance and temperature parameters associated with the four photovoltaic cells under consideration.
Parameters of photovoltaic cell under the partial shading condition
Parameters of photovoltaic cell under the partial shading condition
Under the condition of partial shading, simulation output characteristic curves of the photovoltaic systems are obtained using the parameters presented in Tables 1 and 3 and the three MPPT algorithms, respectively, as shown in Fig. 7.
According to the simulation characteristic curve in Fig. 7, Table 4 shows the relevant output parameters of three traditional MPPT algorithms under standard test conditions.
Output parameters of three traditional MPPT algorithms under shading test conditions
Simulation output characteristic curve of three traditional MPPT algorithms under shading conditions.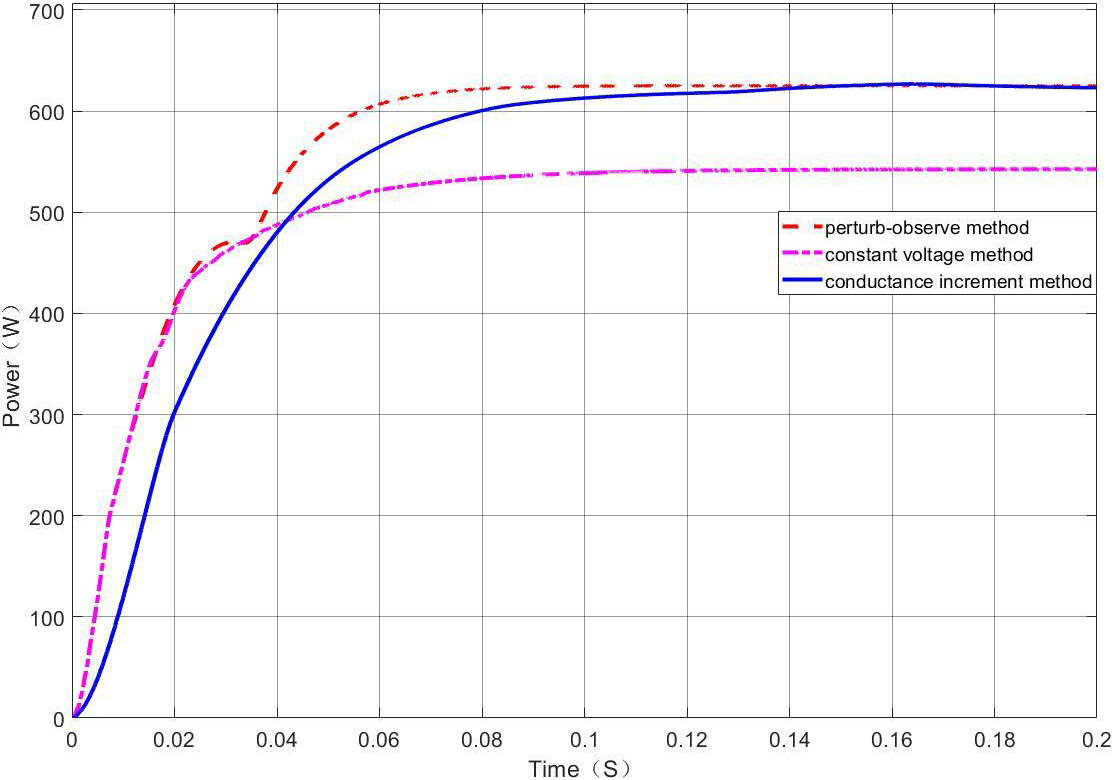
According to the data in Table 4, it can be seen that the disturbance observation method has the shortest tracking time of 57 ms under the condition of partial shading. Nevertheless, the error rate reaches 14.8% and the accuracy is low. Despite their slight oscillations and poor immunity, the constant voltage and conductance increment methods have higher tracking accuracy than the disturbance observation method. It is therefore possible to select different algorithms according to the environment and the control requirements in order to improve the performance of the system.
Standard particle swarm optimization and its application in MPPT
Swarm optimization algorithm is an intelligent algorithm designed by simulating bird swarm foraging. This algorithm first defines a particle swarm with a population of N. Each particle has two parameters: velocity
Among them,
For MPPT applications, the duty ratio D is used as the population particle number, and the particle size is optimized between 0.1 and 0.9. When the particles are at the current
At this point, the fitness value is compared with the individual optimum
In this paper, the design flow of the particle swarm MPPT control algorithm is presented below.
Initialization parameters. Set the number of particles in the population and initialize the parameters for each particle, such as its velocity, position, and inertia weight. Calculate the fitness value. Output the duty ratio based on the position of the particle Update the individual optimal and global optimal. Using the calculated fitness value, compare it with the previous individual optimal and global optimal, and update the individual optimal and global optimal accordingly. Update the position and velocity of the particle. Update the particle’s velocity and position according to Eqs (6) and (7). Terminate the condition. End the algorithm if convergence accuracy is met or the maximum number of iterations is reached. Re-initialize the condition. In the event that the light intensity changes significantly, if the power change is greater than the defined value, re-initialize the parameters and restart the algorithm.
This paper simulates and compares standard particle swarm optimization and the traditional MPPT algorithm under two different environmental conditions: static shading and dynamic shading. As shown in Table 5, the parameters of the PSO algorithm are listed.
Table of parameter settings for the PSO algorithm
Table of parameter settings for the PSO algorithm
(1) Simulation comparison under static shading
During the operation of the photovoltaic system, the external environment changes continuously and cloud changes will cause the photovoltaic cell to be partially shaded, which will have a negative impact on the performance of the system. The parameters of the photovoltaic cell under static shading are listed in Table 6.
Parameter table of photovoltaic cell under static shading
Output parameters of the photovoltaic system of each MPPT algorithm under static shading
Based on Fig. 8, using the parameter values from Tables 1 and 6, we evaluated the simulation outputs of a photovoltaic system under static shading conditions by applying PSO algorithm and three traditional MPPT algorithms. The characteristic curve of the output was obtained accordingly.
Comparison of MPPT algorithms under static shading.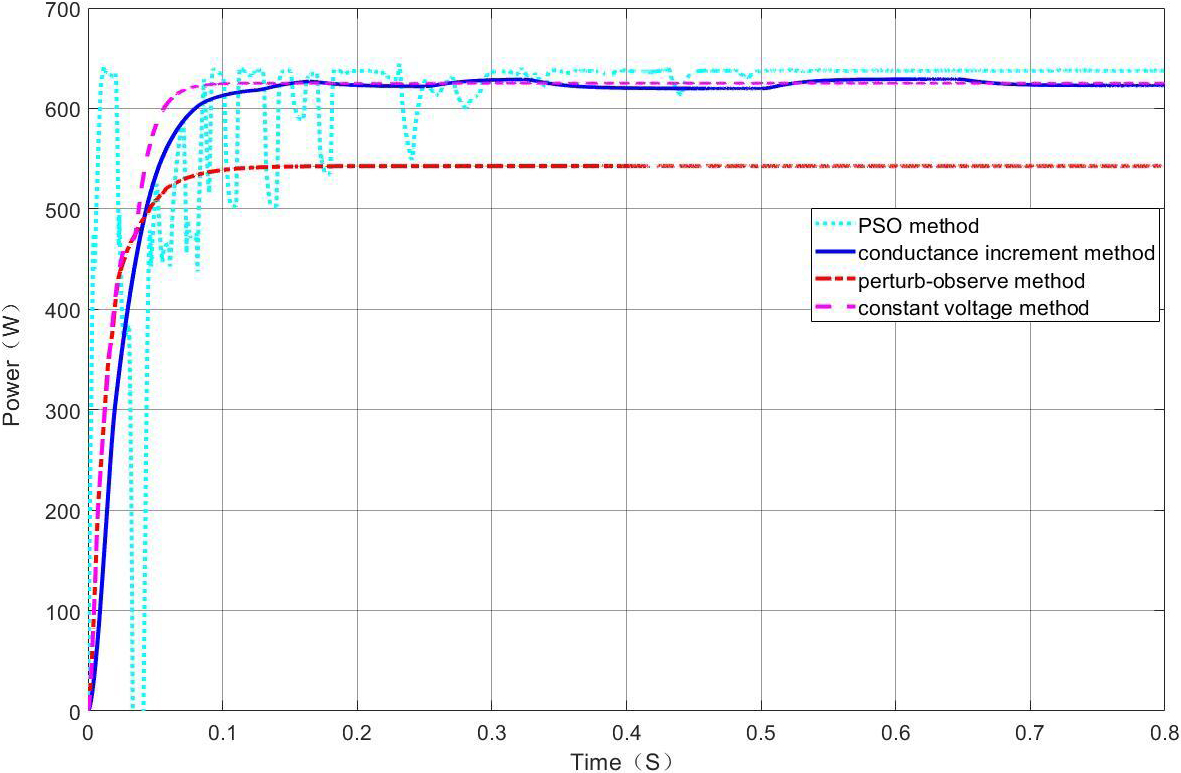
Table 7 provides the relevant output parameters of different MPPT algorithms under static shading conditions as indicated by the simulation characteristic curve in Fig. 8.
As depicted in Fig. 8 and Table 7, the disturbance observation method yields inferior power tracking outcomes compared to both the conductance increment method and the PSO algorithm. Specifically, the conductance increment method achieves maximal power output within a mere 72 ms, whereas the PSO algorithm attains detection of maximum power output at
(2) Simulation comparison under dynamic shading
Each MPPT algorithm was tested under shading mutation conditions to determine its tracking performance. The parameters of the photovoltaic system under dynamic shading conditions are presented in Table 8. In this paper, it is shown that the shading intensity of the photovoltaic system jumps when set at 3 seconds, and the system operates at a temperature of 25 degrees Celsius.
Parameter table of the photovoltaic system under dynamic shading
As shown in Fig. 9, the PSO algorithm and the traditional MPPT algorithm are used to obtain the output characteristic curve for photovoltaic system simulation under dynamic shading based on the parameters of Tables 1 and 8.
According to the simulation characteristic curve shown in Fig. 9, it is possible to determine the relevant output parameters of different algorithms under static shading conditions, as shown in Tables 9 and 10.
The light intensity abruptly changed at
Output parameters of the photovoltaic system of each MPPT algorithm before mutation
Output parameters of the photovoltaic system of each MPPT algorithm after mutation
Comparison of MPPT under dynamic shading.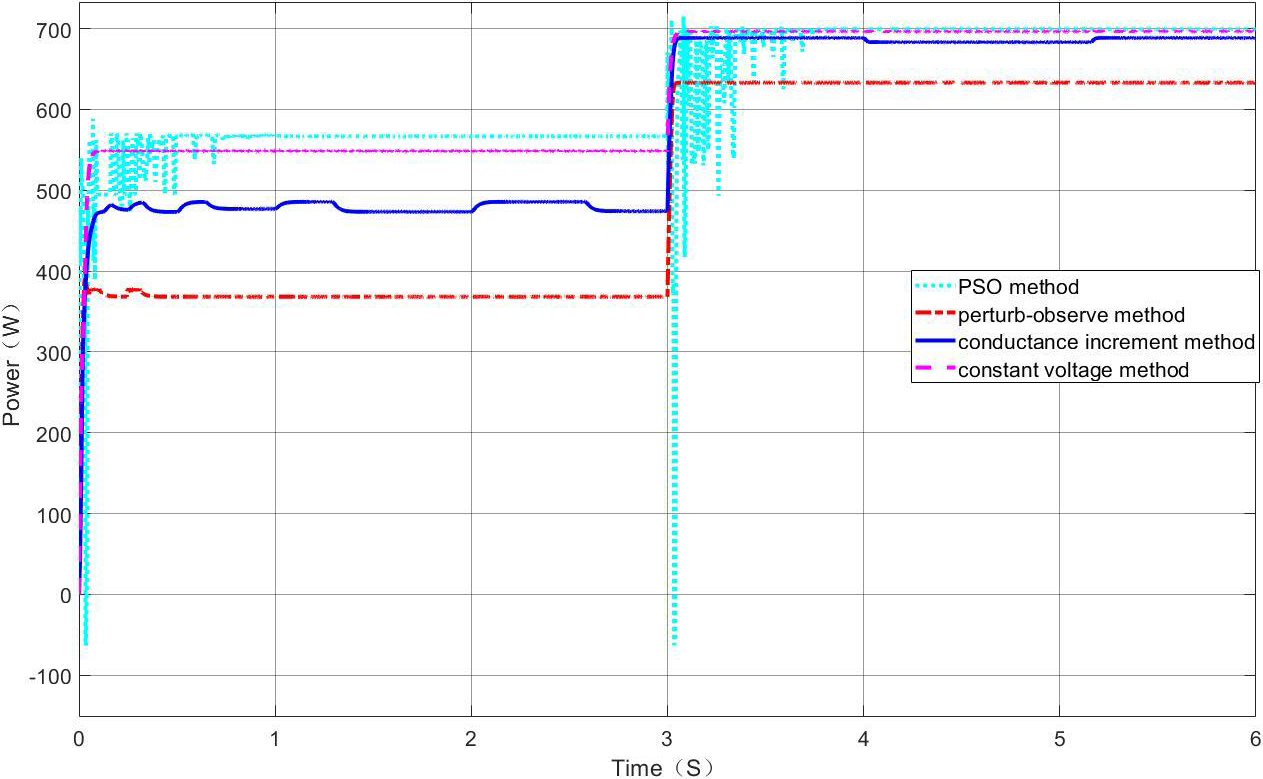
Standard PSO has a long optimization time, which negatively impacts the system’s tracking performance. An algorithm’s optimization performance is directly affected by the inertia weight value
Where,
In addition, linear adaptive changes are also applied to improve the optimization performance for learning factors
Where,
Output parameters of the photovoltaic system
Simulation comparison of the improved particle swarm optimization algorithm and the traditional MPPT algorithm.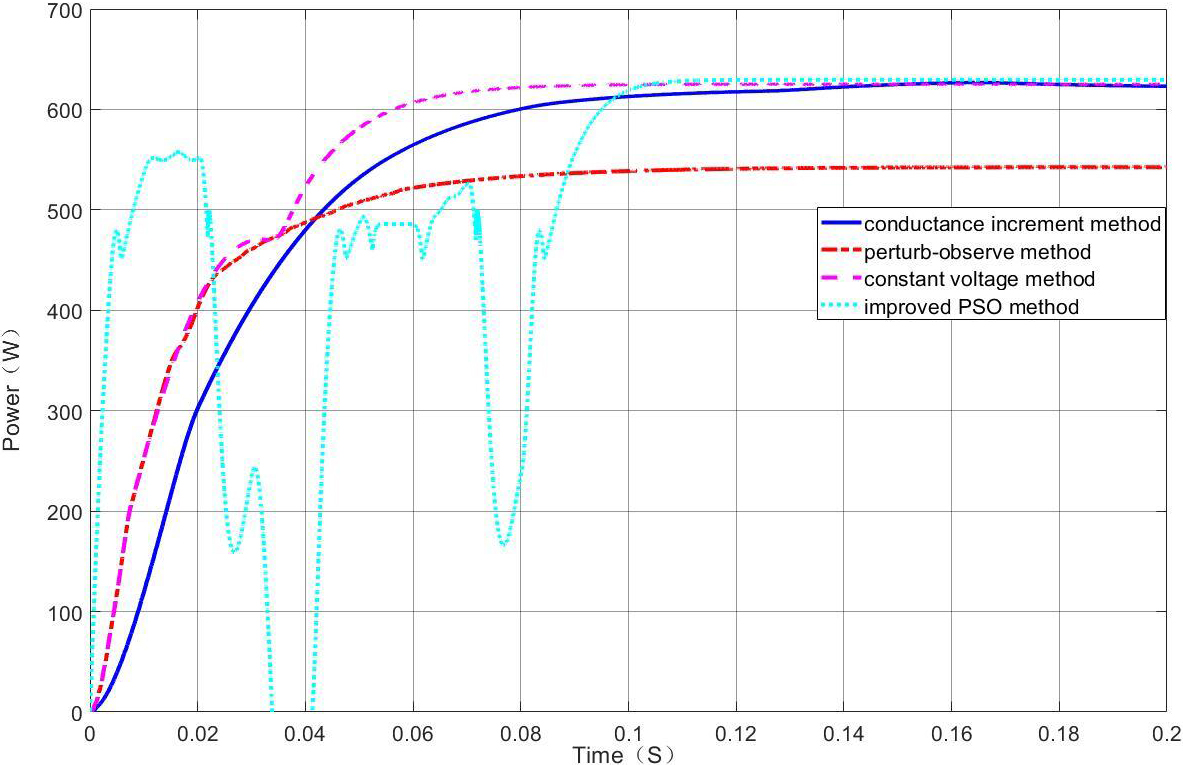
As shown in Table 6, the photovoltaic first-off parameters have been set. A simulation comparison between the improved particle swarm optimization algorithm and the traditional MPPT algorithm is shown in Fig. 10, and the relevant output parameters are listed in Table 11. In Fig. 10, it can be seen that the time to track the maximum power point of the improved particle swarm optimization is
Conclusions
Solar light plays a major role in the generation of photovoltaic power. As light intensity changes, the output power of a photovoltaic system will also change with the light. The system will have a maximum output power under different lighting conditions. The method of how to achieve this maximum output power point has become a key technology for improving the efficiency of the entire system and reducing expenses. The maximum output power point is currently determined using mature algorithms under standard operating conditions, but in practical use, the photovoltaic system may appear shaded due to light changes, resulting in a multi-peak situation for the maximum output power point of the entire photovoltaic system, which is more apparent in specific application environments. On a ship, for example, this situation becomes more evident since the ship is a moving body. An adaptive PSO algorithm is proposed in the paper based on this operating condition. The following conclusions can be drawn from the simulation analysis:
The traditional MPPT algorithm is characterized by low accuracy, steady state oscillation, and inability to track the maximum working point of the system if the light suddenly changes. In dynamic shading, the standard PSO algorithm has the advantage of high tracking accuracy, no obvious oscillations, and the ability to track the maximum power point well, but it has the disadvantage of long searching times and low real-time performance. By contrast, the adaptive PSO algorithm advanced in this paper enables fast and precise tracking of the maximum power point of the system under static/dynamic partial shading or uniform illumination. Compared to traditional PSO algorithms, the adaptive PSO approach exhibited faster convergence times and significantly improved optimization performance in real-time. These outcomes highlight the crucial significance of adaptive algorithms in enhancing photovoltaic system efficiency, adaptability, and overall system performance.
Footnotes
Acknowledgments
This paper was supported by the National Natural Science Foundation of China [52171308]; Natural Science Foundation of Fujian Province, China [2022J01333]; Innovation Laboratory for Sciences and Technologies of Energy Materials of Fujian Province.
Declaration of competing interest
All the authors declare that they have no competing financial interests or personal relationships that will influence the work in this paper.