
Abstract
This paper discusses the development and design of two wheeled-type In-Pipe Inspection Robots (IPIRs), Kuzhali I and Kuzhali II, which were created to address the limitations of traditional human inspection methods and earlier robot designs. Specifically, the robots aim to overcome the motion singularity experienced by IPIRs when navigating through curved pipes. Kuzhali I was developed with wheels mounted at an asymmetric angle, which enables the wheels to maintain contact with the pipe’s surface, preventing motion singularity. However, Kuzhali I had limitations due to its prismatic mechanism, and thus Kuzhali II was developed with a telescopic mechanism to allow it to pass through vertical pipes with obstacles. Motion analysis was conducted on both robots to demonstrate how they overcome motion singularity and navigate through straight and curved pipelines. Simulation results showed that the forces acting on the robots’ wheels fell within 5 N to 12 N, demonstrating stability while navigating pipeline junctions. Experimental tests were conducted on Kuzhali II, and the results were compared to simulation results, showing an error of less than 5%. The results of the experiments indicate that Kuzhali II is safe to use for pipeline inspection, can navigate through vertical pipelines with ease and can overcome motion singularity in curved pipes. These robots offer a faster, more accurate, and safer alternative to human inspection, which can reduce the risk of pipeline failures and associated environmental and safety hazards.
Introduction
Pipelines have become the most popular means of transportation for fluids and gases. As a result, it is essential to continuously monitor the health and safety of pipelines [2]. There are different non-destructive testing (NDT) methods for inspections, such as visual, radiographic, ultrasonic, and hydrostatic testing [7]. However, with the technological advances in robotics over the past decade, robots have become the preferred option for pipeline inspection. This is because small pipelines are difficult to access for humans [27]. Over the past few years, there have been multiple advancements in the field of In-Pipe Inspection Robots (IPIRs). These robots are classified based on their various types of locomotion. These locomotion types include Pipeline Inspection Gauge (PIG) type robot [9,12,25,38,59,60,65], screw type robot [36,37,41,47–50], inchworm type robot [3,17,21,30,32,54,56], wall press type robot [5,6,18,24,51], walking type robot [23,43–45,58], caterpillar type robot [1,10,11,52,63] and wheel type robot [4,14,20,22,26,29,35,42,46,55,57,62,64]. Figure 1 shows the different IPIRs. Each of these locomotion types has its limitations and advantages [16].

In-Pipe Inspection Robots [15].
The PIG type of IPIRs employs water pressure to travel over long distances without causing any damage to the pipeline [12,25,38,59,65]. Screw-type IPIR manoeuvres in a helical pattern and doesn’t harm the surface it travels [36,37,41,47,49]. Inchworm type IPIR has a strong grip and less traction, making it suitable for movement inside pipelines [17,21,30,32,54]. Wall press type IPIR uses contact force to move steadily through pipelines [5,6,18,24,51]. The walking type of IPIRs uses a complex leg mechanism that enables it to walk with minimal slippage and surface damage to the pipeline. [23,43–45,58]. The caterpillar type of IPIRs utilizes tracked wheels to navigate within pipelines, allowing it to adjust to the varying inner pipeline environments. [1,10,11,52,63]. Wheel type IPIRs travels through pipelines by rotating its wheels and offers greater mobility in comparison to other types [14,20,26,29,35]. However, these robots encounter obstacles inside pipelines due to the presence of curved and branched pipes, resulting in motion singularity and irregular movement.
Motion singularity
The term “Motion Singularity” [31,33] is used to describe the condition where the robot wheel loses contact while passing through pipeline junctions such as curved pipes, L and T-branch pipes. The caterpillar robot is a popular choice for In-Pipe Inspection Robot because of its stability and traction force. It utilises tracked wheels to maintain continuous contact with the inner surface of the pipeline, even during turns [1,10,11,52,63]. However, it encounters difficulty in navigating L and T-branch pipes [15,33], resulting in motion singularity when the wheels loses contact [33].
To address this issue, a caterpillar robot using two modules was developed to avoid motion singularity in T-branch pipes. The modules have caterpillar wheels mounted at different angles to prevent loss of contact [33]. Figure 2 shows the caterpillar robot where the second module fixes the wheels where there is a gap in first module wheel fixed angle. Similarly, the “FAMPER” robot used angled (5°) caterpillar wheels to avoid motion singularity during turning [31]. In [34], a robot with a two-wheel chain mechanism was introduced, which is capable of avoiding motion singularity while turning.
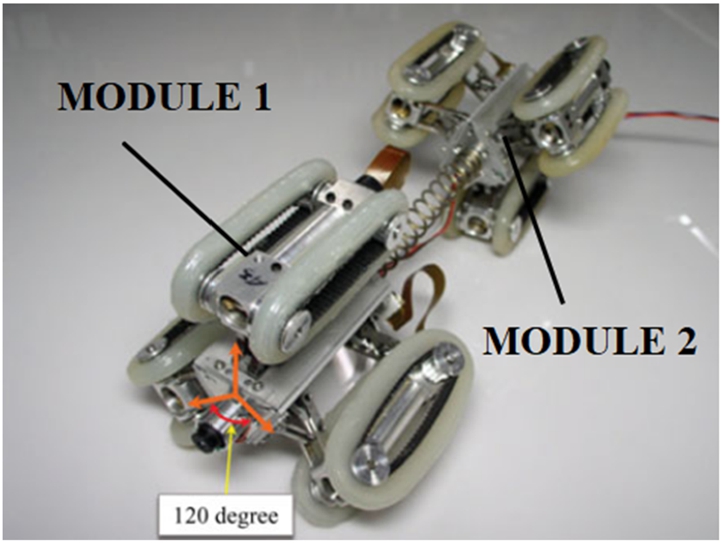
Collaborative IPIR which solved motion singularity [33].
According to the literature, traditional robots with wheels are designed with symmetrical wheel placement at a 120° angle to confirm uniform force distribution and enhanced stability while traversing pipelines. These wheeled robots utilize a wall press mechanism to maintain this stability [33,39,53,61,63]. However, a study mentioned in [35] found that using three wheels in wheeled IPIRs during forward can cause irregular motion inside the pipeline, which can be resolved by using six wheels.
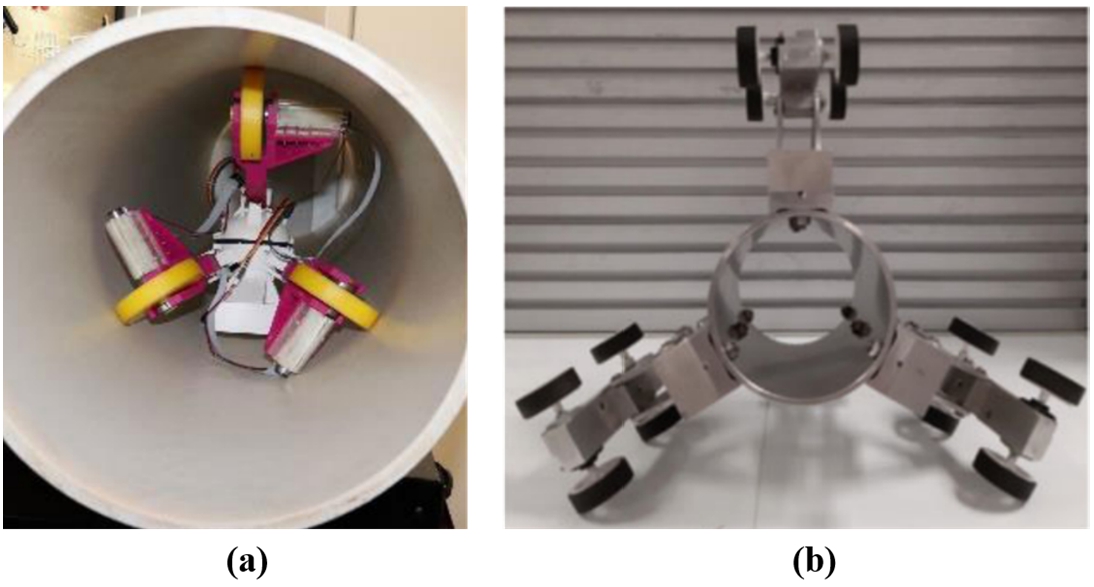
The wheeled robot with a three-wheel configuration uses two types of wheels to navigate through the pipelines, as shown in Fig. 3. One type uses single wheels, while the other type uses double wheels. The single wheel configuration features a motor attached perpendicular to the wheel, while the double wheel configuration has a motor fixed parallel to the wheels.
When moving forward, the single three-wheel configuration robot tends to rotate in the circumferential direction of the pipeline [40] as shown in the Fig. 4 (a)–(c).
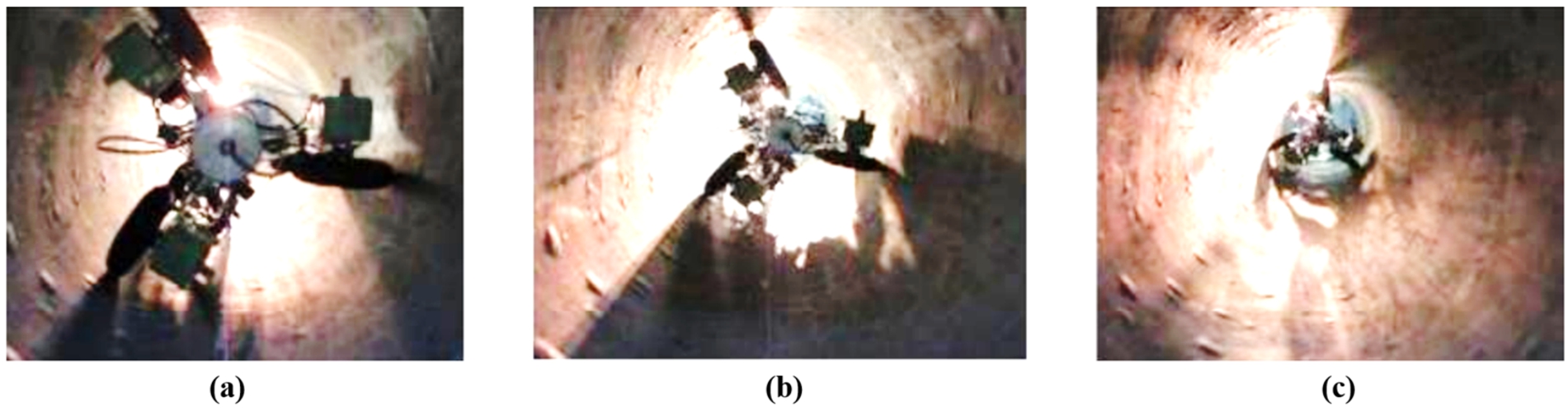
(a)–(c) Robot rotating along the circumferential direction of the pipeline [40].
The research on the motion of these robots has only focused on their movement in straight pipelines. However, in situations where the robot needs to navigate through curved pipelines, such as in [8], it is observed that the robot tends to topple over, resulting in a different orientation at the end of the pipeline as compared to the starting point, as depicted in Fig. 5. Moreover, due to the placement of the wheels, it becomes challenging to steer the robot through branched pipes.
Orientation of the robot: (a) Before entering the curved pipeline and (b) after exiting the curved pipeline [8].
Thus, the primary objective of this research is to develop a wheeled IPIR utilizing a single three-wheel configuration, which can effectively overcome motion singularity and irregular motion while passing through curved pipelines.
This article is structured as follows: Section 2 describes the design and simulation of wheeled IPIR and Kuzhali I. Section 3 covers the design and simulation of Kuzhali II. Section 4 explains the development process of the Kuzhali II prototype. Finally, Section 5 presents the experimental verification of Kuzhali II’s simulation results, including its successful motion inside a curved pipe without motion singularity and vertical pipeline without slipping.
The proposed robot is named “Kuzhali” in Tamil language. Where “kuzhal” means pipe in Tamil language and hence it is named as Kuzhali. This section involves the design of the wheeled IPIR based on literature and the proposed robot. Both models are then simulated to observe how the proposed robot avoids motion singularity, while the wheeled IPIR faces it.
Design
The robots’ solid models are created using Solidworks design software. These robots utilize a prismatic mechanism to adjust to the irregularities found inside pipelines, which comprises a small link, leg, fixed joint, and prismatic joint. Two IPIRs with wheels are designed, with one having the wheels fixed 120° apart and the other, a proposed robot with the wheels fixed at angles of 120°, 104.88°, and 135.12°, calculated from the centre of each wheel to the robot’s central axis. It is designed with the parameter of passing through pipelines with an internal diameter ranging from 250 mm to 350 mm [19,28]. Figure 6 shows the wheeled IPIR and the proposed robot.
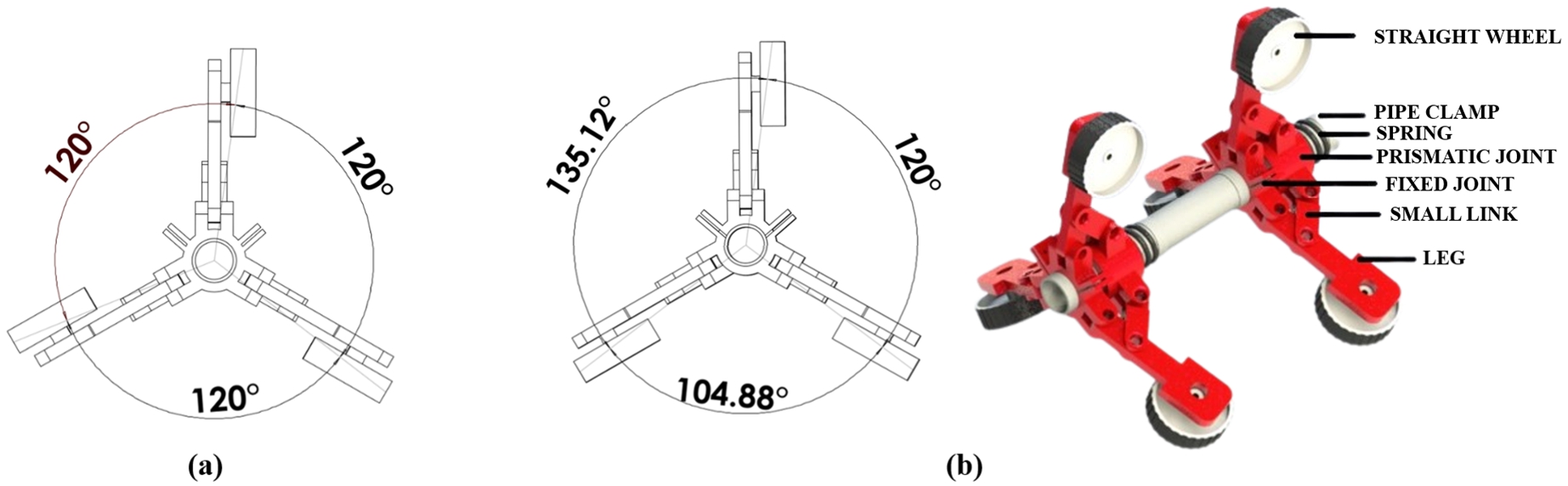
(a) Wheeled IPIR and (b) proposed IPIR [15].
The simulation is done on both the wheeled IPIR and Proposed IPIR. The simulation is done using ADAMS software. This software is an engineering simulation tool that creates virtual prototypes and performs simulations. The simulation consists of a straight and curved pipe with an inner diameter of 340 mm. The robot enters the straight pipe, then the curved pipe, and exits through the straight pipe. Several parameters are set for the simulation, beginning with the selection of materials for the components. Polyvinyl Chloride is chosen for the main body, PolyLactic Acid (PLA) is chosen for the prismatic mechanism and its associated parts, and rubber is chosen for the wheel. Gravity is applied to the simulation environment, and the speed of 100 rpm is given only to the bottom two wheels of the robot’s front section. Selected stiffness of spring is 2.826 N/mm. Figure 7 shows the simulation environment.
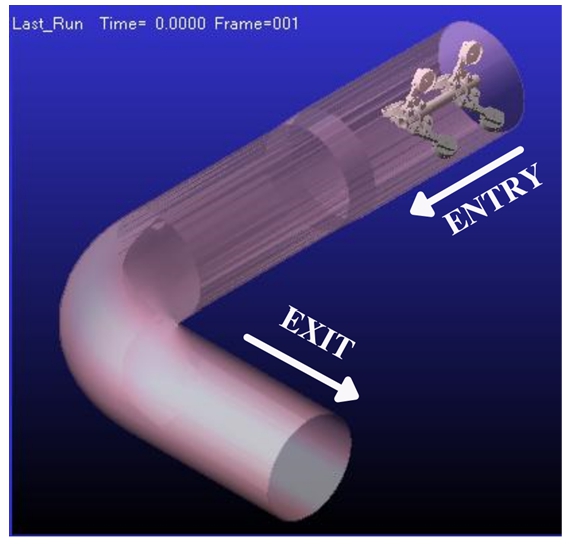
Simulation environment.
The simulation results demonstrate that the wheeled IPIR robot encounters motion singularity when navigating through a curved pipe, whereas the Kuzhali I robot can pass through curved pipes without any issues. Specifically, the wheeled IPIR robot’s wheels lose contact with the pipe surface while passing through the concave part of the pipe, which is due to the uniform wheel mounting angle. Additionally, the prismatic joint connecting the robot’s three legs results in equal compression as the robot moves through the pipeline, leading to motion singularity inside curved pipes. On the other hand, throughout its motion, the wheels of Kuzhali I maintain contact with the surface of the pipe. It uses a similar mechanism to traditional wheeled robots, except for the angle at which the wheels are mounted. As a result, this design avoids motion singularity while navigating through curved pipelines, including turns on both the left and right sides. Figure 8 shows the simulation results of wheeled IPIR and Kuzhali I.
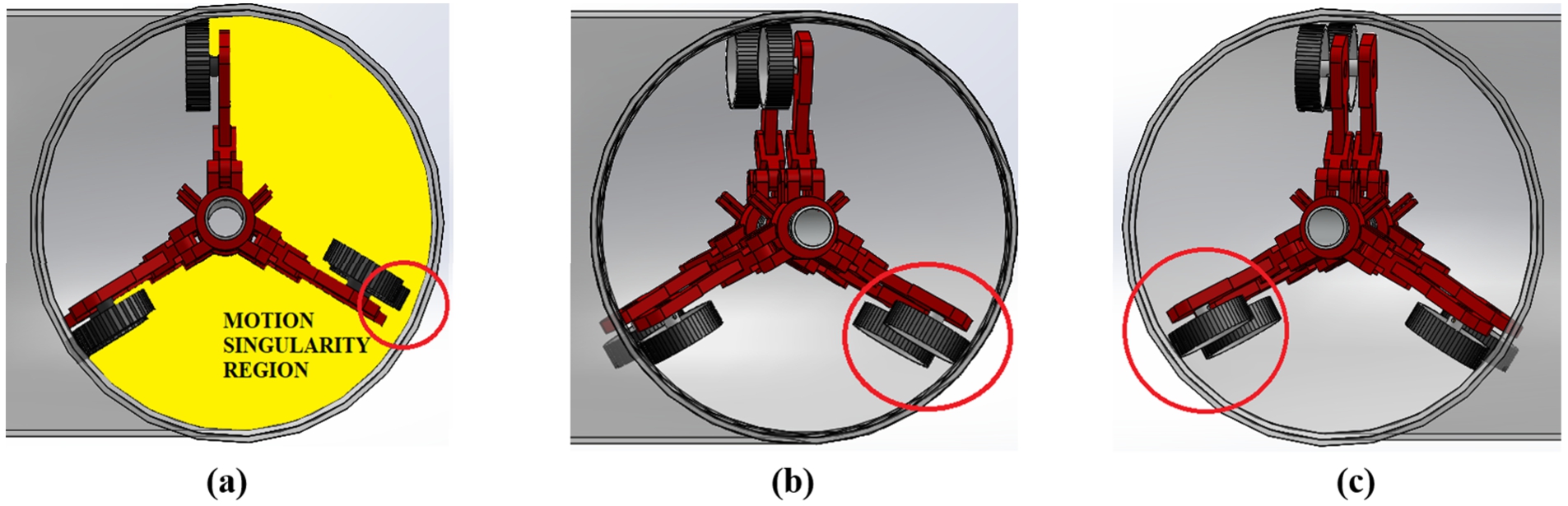
Simulation results: (a) Wheeled IPIR encountering motion singularity, (b & c) Kuzhali I turning curved pipe (left & right) without facing motion singularity [15].
Then using the post processing tools in ADAMS software, the angular velocity of wheels, forces acting on wheels, spring force and linear velocity of wheels are taken. It is seen that the angular velocity of wheeled IPIR wheels at the curved pipeline has lesser magnitude due to loss of contact of wheels and the angular velocity of Kuzhali I wheels have higher magnitude at the curved pipeline due to the wheel having constant contact with the surface. The forces acting on the wheeled IPIR wheels are not uniform and on Kuzhali I wheels it is uniform. Spring 1 and 2 force vary due to motion singularity whereas the spring 1 and 2 force has same trend due to avoiding motion singularity. The linear velocity of the robot in straight pipeline for wheeled IPIR is 0.35 m/s and the linear velocity of the robot in straight and curved pipeline for Kuzhali I is 0.33 m/s. The comparison between the wheeled IPIR and Kuzhali I can be seen in Table 1.
Comparison between wheeled IPIR and Kuzhali I
The Kuzhali I is capable of passing through horizontal, curved, and branched pipes without any obstacles. However, to evaluate its performance when faced with obstacles in a vertical pipe, a simulation was conducted [13]. In this simulation, all six wheels were active to provide the required torque for movement within the vertical pipe. The results indicated that due to the prismatic mechanism’s dependency, the Kuzhali I lost contact or got stuck while passing through a vertical pipe with an obstacle. This occurred because it lost stability while passing over the obstacle, causing the robot’s central axis to shift from the pipe’s central axis. Therefore, it is evident that the robot’s adaptive mechanism needs improvement, and an independent mechanism should be implemented so that all legs do not compress simultaneously.
Kuzhali II
Kuzhali II is the next version of Kuzhali I this is designed to pass over obstacles in vertical pipelines as well as overcome motion singularity. In this section the design and simulation of Kuzhali II is discussed.
Design
Kuzhali II design has a change in mechanism when compared to the Kuzhali I mechanism. Here the prismatic mechanism is replaced with a telescopic mechanism. Kuzhali II consists of the following parts: chassis, outer tube, motor clamp, spring, inner tube, motor and wheel. It has telescopic mechanism where each leg compresses individually. The wheel placement was retained as in Kuzhali I but it is seen that there is a change in wheel placement angle. The angle is found to be 120°, 158.40°, and 81.6° here there is a slight change in angle occurs this is because of the robot design, actuator and wheel selection. Figure 9 shows the rendered solid model of Kuzhali II.
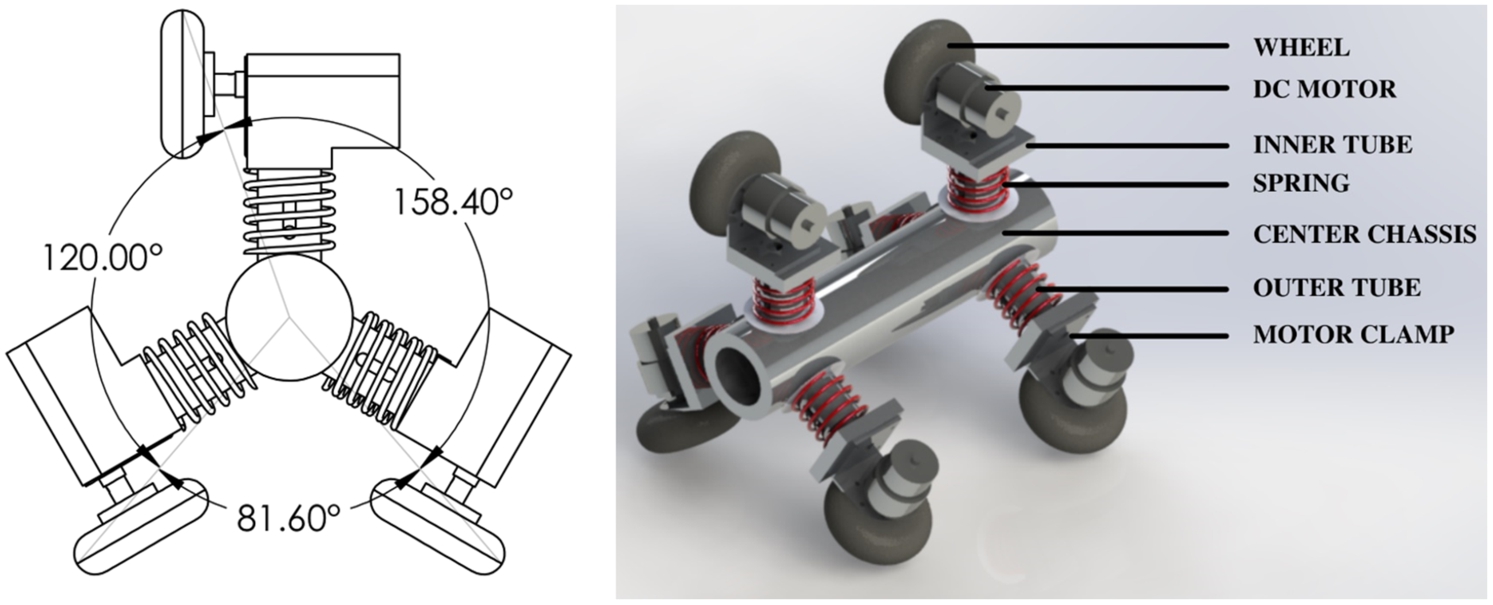
Rendered solid model of Kuzhali II.
The simulation in a vertical pipe with obstacle was done for Kuzhali II and the results show that Kuzhali II passes the over the obstacle without any stability issues and the centre axis of the robot does not offset from the centre axis of the pipe like Kuzhali I [13].
This section involves simulating Kuzhali II’s movement through both straight and curved pipelines to check for any instances of motion singularity during its motion through the curved pipeline. For this simulation, certain parameters were specified. Specifically, six wheels of Kuzhali II were enabled, and their speeds were set to 20 rpm. The material for the robot body was designated as aluminium 6061, while the wheels were designated as being made of rubber. Furthermore, forces such as gravity were taken into account, and the interaction and contact between components were established. Figure 10 shows the simulation environment of Kuzhali II.
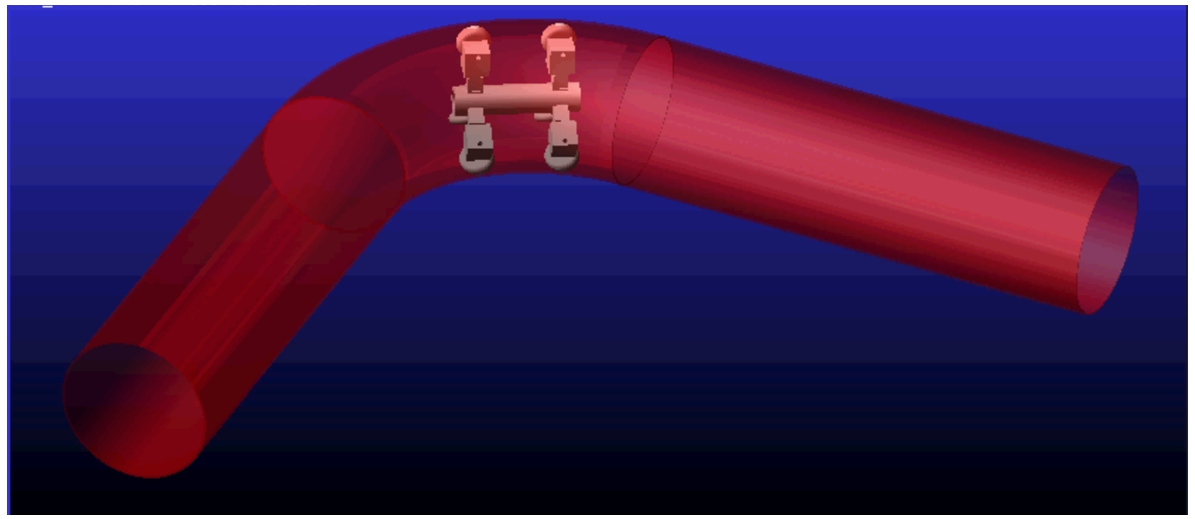
Simulation environment of Kuzhali II.
The simulation result displayed in Fig. 11 demonstrates that when the robot travels through a curved pipe, the right wheel encountering the concave portion experiences the highest force of 12 N, while the left wheel encountering the convex part experiences a force of 7.5 N. The top wheel of the robot experiences a force of 5 N. These forces acting on the robot’s wheels during its passage through straight and curved pipelines range from 5 N to 12 N, indicating stability during navigation of pipeline junctions.
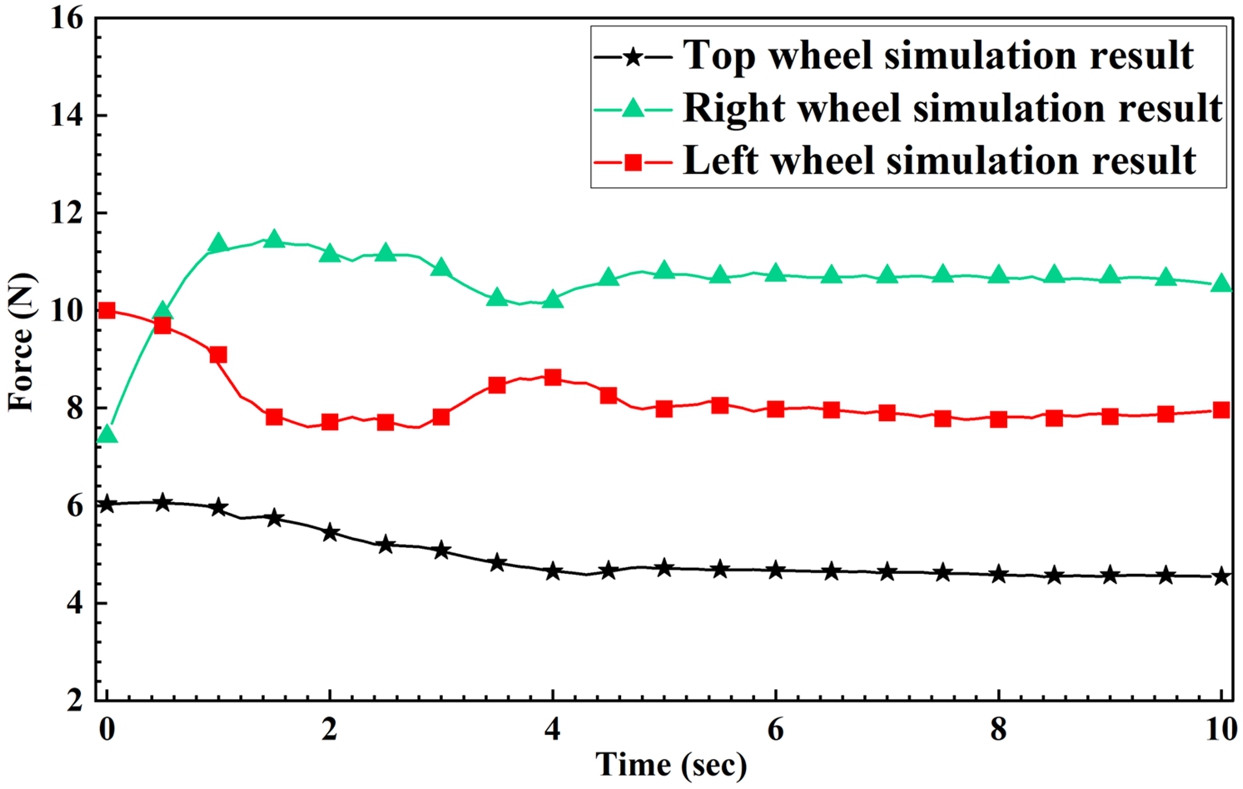
The forces acting on a wheel of Kuzhali II while it passes through a curved pipe.
These results indicate that the Kuzhali II does not experience motion singularity when traveling through a curved pipe. Additionally, the forces acting on the wheels are more or less equal during its passage through the curved pipe. A comparison between Kuzhali I and Kuzhali II is available in Table 2.
Comparison between Kuzhali I and Kuzhali II
The Kuzhali II robot was designed to address the limitations of its predecessor, which led to replacing the prismatic joint with a telescopic joint. The robot comprises several components, including the main body, inner shaft, motor housing, and body cap. All these components are made from aluminium 6061 in the second prototype to minimise the robot’s weight while maintaining its strength and resilience.
Kuzhali II can navigate through various pipe configurations, including horizontal, vertical, curved, and branched pipelines. The robot can traverse pipes with an internal diameter that falls within the 250–320 mm range. As an improved iteration of Kuzhali I, Kuzhali II has the added ability to overcome motion singularity. The robot has a total weight of 5.2 kg and measures 250 mm in length. Figure 12 shows the Kuzhali II prototype.

Kuzhali II prototype.
A load cell has been affixed to all three wheels to examine the forces acting upon the wheels of Kuzhali II and their impact on the robot’s stability within the pipeline. A load cell transducer converts a mechanical force or weight into an electrical signal. It is often used to measure the weight or force acting on an object or structure and is commonly found in industrial and laboratory applications. Load cells can be designed to measure different ranges of weight or force and come in various shapes and sizes depending on the specific application. They are used in various fields, such as aerospace, automotive, and manufacturing. This device facilitates the measurement of the force exerted on each wheel. The load cell is attached to the HX711 load cell amplifier module, which gets data from the load cell and sends it to the microcontroller, where the output is displayed. Figure 13 shows the load cell attached to one of the Kuzhali II wheels.
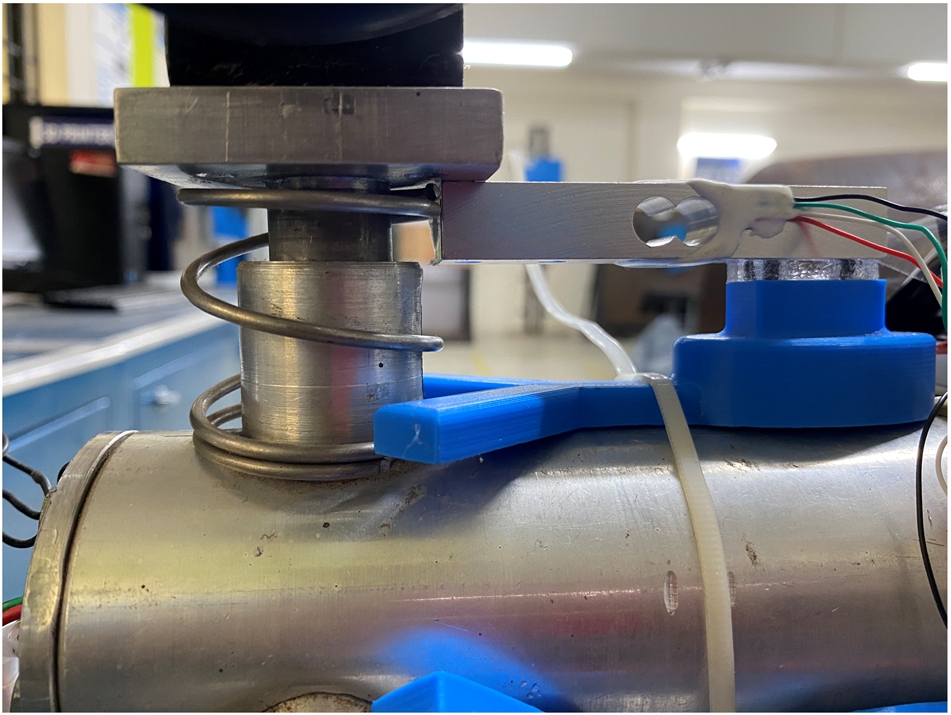
Load cell attached to one of Kuzhali II wheels.
The force exerted upon the wheels during the traversal of the curved pipeline is depicted in Fig. 14. The analysis reveals that the top wheel experienced a force of 4.78 N, with a 3.629% error between the simulation and experimental results. The right wheel experienced a force of 11.14 N, with a 4.69% error between the simulation and experimental results. Finally, the left wheel experienced a force of 7.9 N, with a 3.18% error between the simulation and experimental results.
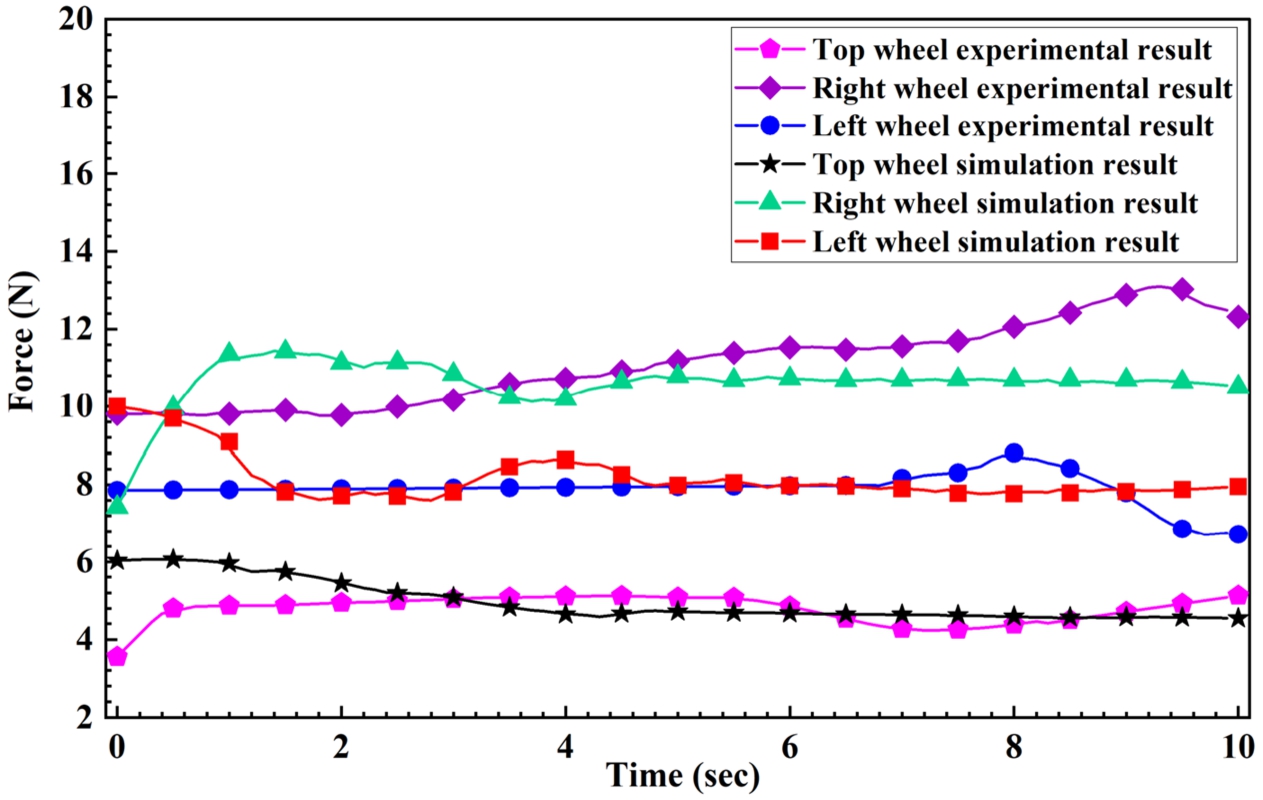
Force acting on wheels when passing through a curved pipe.
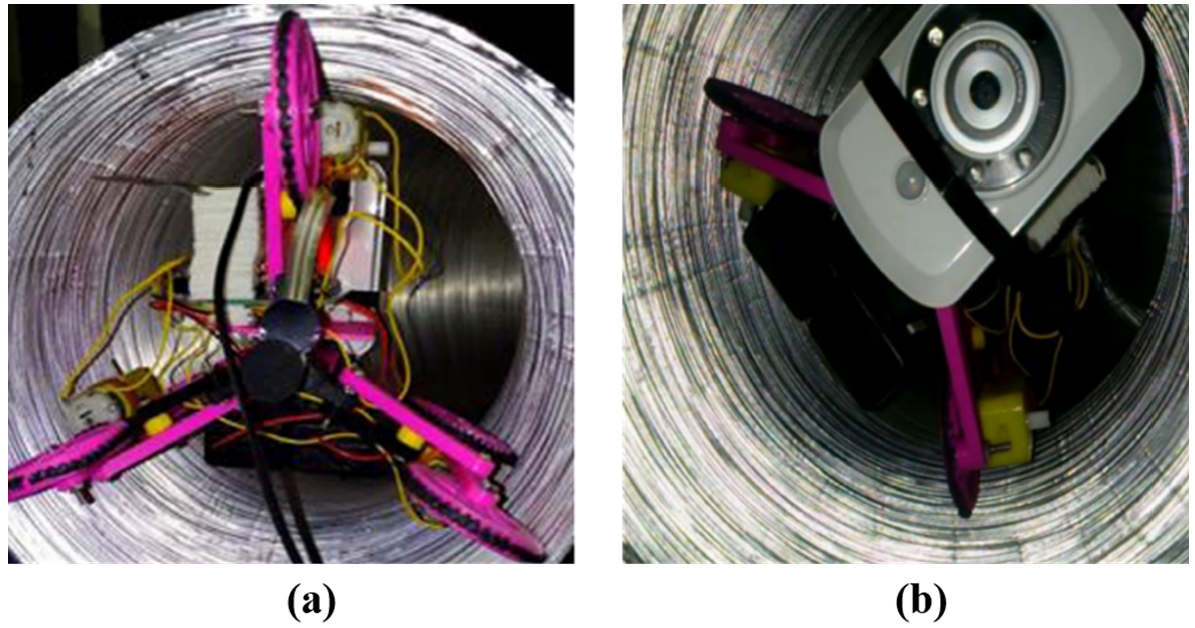
Performance tests were also carried out using Kuzhali II and it was found that the robot can pass through horizontal, vertical, curved and branched pipes. Figure 15 shows Kuzhali II passing inside a vertical pipe.
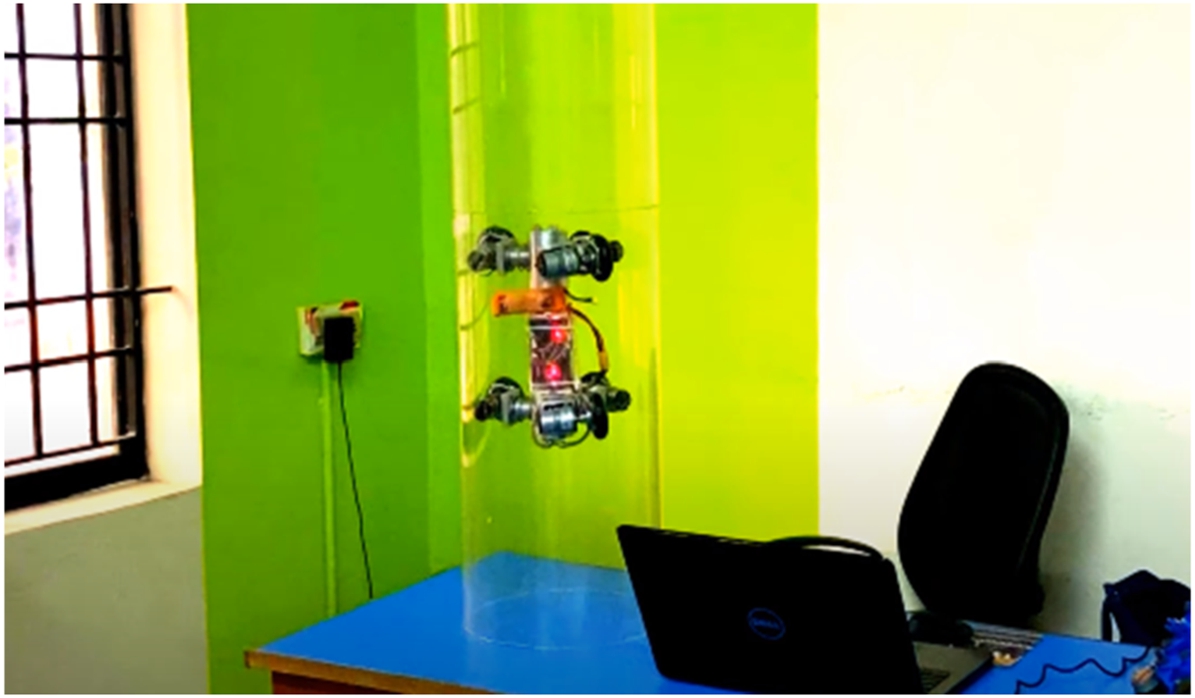
Kuzhali II climbing inside a vertical pipe.
This research shows the development of wheeled-type IPIRs, Kuzhali I and Kuzhali II, which have successfully addressed the limitations of traditional human inspection methods and earlier robot designs. The studies show that wheeled IPIRs encounter motion singularity while passing through the curved pipeline. Thus, the robot Kuzhali I was proposed to overcome the issue of motion singularity experienced by IPIRs when navigating through curved pipes. Kuzhali I overcome motion singularity with its unique wheel placement. Kuzhali I encountered stability issues when traversing vertical pipelines having obstacles, despite resolving the motion singularity problem. The limitation was due to its use of a prismatic mechanism. Kuzhali II was proposed as a solution, which replaced the prismatic mechanism with a telescopic one while maintaining the exact wheel placement as Kuzhali I. Simulations were performed with Kuzhali II to check whether it can pass through vertical pipes with obstacles and can overcome motion singularity in curved pipes.
The results demonstrate that Kuzhali II can pass through vertical pipes with obstacles without losing stability and overcome motion singularity in curved pipes. Then Kuzhali II was developed to verify the simulation result. Kuzhali II was made to pass through a curved and vertical pipeline to check its performance. The performance test indicates that Kuzhali II is safe to use for pipeline inspection and can easily navigate vertical pipelines. An experiment was conducted to measure the forces exerted on the legs of Kuzhali II as it traversed a curved pipeline. The experiment was done by attaching a load cell to the robot’s legs. The results of the experiment were then compared to those obtained through simulation, and it was found that the difference between them was less than 5%. As a result, Kuzhali II is a reliable and secure option for inspecting pipelines. These robots offer a faster, more accurate, and safer alternative to human inspection, which can reduce the risk of pipeline failures and associated environmental and safety hazards. The use of pipeline inspection robots (PIRs) has become an essential tool in pipeline maintenance and safety, enabling faster and more accurate inspections, which in turn can reduce the risk of pipeline failures and associated environmental and safety hazards. The development of Kuzhali I and Kuzhali II significantly contributes to pipeline inspection robotics. Further research and development in this area could lead to more efficient and effective pipeline inspections, improving pipeline infrastructure’s overall safety and reliability.
Conflict of interest
None to report.