
Abstract
Numerical models of seismic-resistant structures are typically validated by comparing numerically predicted key seismic response parameters to those obtained from benchmark shake table experiments. However, studies have shown that for structures rocking on rigid foundations, the seismic response can be unrepeatable in experiments and deterministically unpredictable by numerical models. Therefore, researchers have proposed to validate rigid rocking models using statistical approaches, yet no experimental study has examined whether the same observations apply to slender multi-degree-of-freedom (MDOF) free-rocking structures or controlled rocking structures with positive post-rocking stiffness and dedicated energy dissipation. This data paper describes the now publicly available data obtained from a series of 254 shaking table tests of a slender MDOF tower structure with two base-rocking mechanisms, which can be used to examine the predictability of the seismic response of an MDOF rocking structure and to statistically validate different approaches aiming to model tall and slender structures that utilize base-rocking mechanisms to mitigate the dynamic response due to higher-mode effects.
Introduction
Designing structures to sustain less damage and residual drifts following major earthquakes is a key step toward developing more sustainable and resilient cities. One promising approach to achieving seismic resilient structures is through the foundation uplift and rocking response to resist seismic loads and limit the seismic demand transfer to the superstructure (Chopra and Yim, 1985). These structures rely on either foundation rocking on flexible soil or a specifically designed rocking base supported on a nondeformable foundation, both of which are characterized by an overall nonlinear force-deflection response at the base of a structure to limit seismic demands while exhibiting recentering capabilities that return to their pre-excitation configurations after an earthquake. Because of their ability to mitigate both damage and residual drifts, rocking structures have seen a sharp increase in interest among the earthquake engineering research community over the last two decades (Zhong and Christopoulos, 2021). Several researchers have proposed and experimentally studied the use of foundation rocking on flexible soil to provide enhanced seismic performance of structures (Anastasopoulos et al., 2010; Antonellis et al., 2015; Gajan and Kutter, 2008; Hakhamaneshi and Kutter, 2016; Kim et al., 2015; Liu et al., 2013; among others), whereas others have focused on utilizing engineered rocking base mechanisms that are typically supported on rigid foundation, as summarized by Zhong and Christopoulos (2021). While both cases limit the seismic force demands of a structure through the base-rocking response, foundation rocking on flexible soil tends to dissipate energy more gradually than the case with rigid rocking foundation where the kinetic energy dissipates instantaneously upon rocking impact (Chopra and Yim, 1985). Such abrupt changes in the latter case have raised concerns among researchers that rigid rocking motion is somewhat unpredictable, especially when numerical models used in a number of previous studies failed to capture the seismic response of rigid rocking structures obtained from experiments (Anagnostopoulos et al., 2019; Aslam et al., 1980; Bachmann et al., 2018; Drosos and Anastasopoulos, 2014; ElGawady et al., 2011; Kalliontzis and Sritharan, 2018; Lipscombe and Pellegrino, 1993; Makris and Konstantinidis, 2003; Mouzakis et al., 2002; Peña et al., 2007; Priestley et al., 1978; among others). These studies suggested that predicting the rocking response is challenging because the results are highly nonlinear and sensitive to perturbations of model parameters due to the abrupt impact response and the negative stiffness during the free-rocking phase. Because of the observed model sensitivity and the inherently stochastic nature of seismic loading, many have proposed to validate numerical models using statistical approaches rather than examining the models’ performance to one specific excitation (Bachmann et al., 2018; Lin and Yim, 1996; Vassiliou et al., 2021a). Nevertheless, the above studies and suggestions were made based on results of single-degree-of-freedom (SDOF) rocking structures or rigid-rocking blocks where the overall dynamic characteristics of these structures were governed by the free-rocking mechanism. Researchers have also started to investigate the dynamic response of rocking structures that have deformable cantilever superstructures with concentrated masses at the top (Bachmann et al., 2016; Truniger et al., 2015; Vassiliou et al., 2015). Although these studies showed improved predictability in terms of the maximum rocking displacements and superstructure deformation, the response time histories were still found to be difficult to predict numerically. No study has yet examined the predictability of multi-degree-of-freedom (MDOF) rocking structures where the overall response of the structure is dominated by the dynamic characteristics of the MDOF superstructure. In addition, as opposed to free-rocking structures where the dynamic response is characterized by negative post-rocking stiffness and low energy dissipation mainly upon rocking impacts, the majority of research and development on the practical application of rocking structures focus on the concept of controlled rocking, which typically relies on elastic restraints and structural fuses across the rocking interface to provide positive post-rocking stiffness and considerable energy dissipation to the rocking response in a controlled manner. An overview of different types of proposed controlled rocking systems can be found in the review paper by Zhong and Christopoulos (2021). While different numerical models have been proposed as part of the process of developing and evaluating these proposed systems, there is no explicit study focusing on the predictability of controlled rocking MDOF structures with positive post-rocking stiffness and dedicated energy dissipation.
This data paper discusses a new experimental data set for the dynamic response of a scaled slender MDOF rocking structure that is susceptible to higher modes of vibrations under earthquake loading with (1) a free-rocking base mechanism and (2) uncoupled free-rocking and controlled-rocking dual base mechanisms. This data set provides a well-documented experimental program on slender MDOF rocking structures for enhancing the understanding of the behavior of rocking structures that extends previously established data sets on structures rocking on flexible soils (Gavras et al., 2020; Hakhamaneshi et al., 2020) and on SDOF rigid rocking structures (Reggiani Manzo et al., 2022; Vassiliou et al., 2021b, 2021c). This data set can be used for the further validation of numerical models developed to capture the seismic response of slender MDOF structures with base-rocking mechanisms.
Specimen description
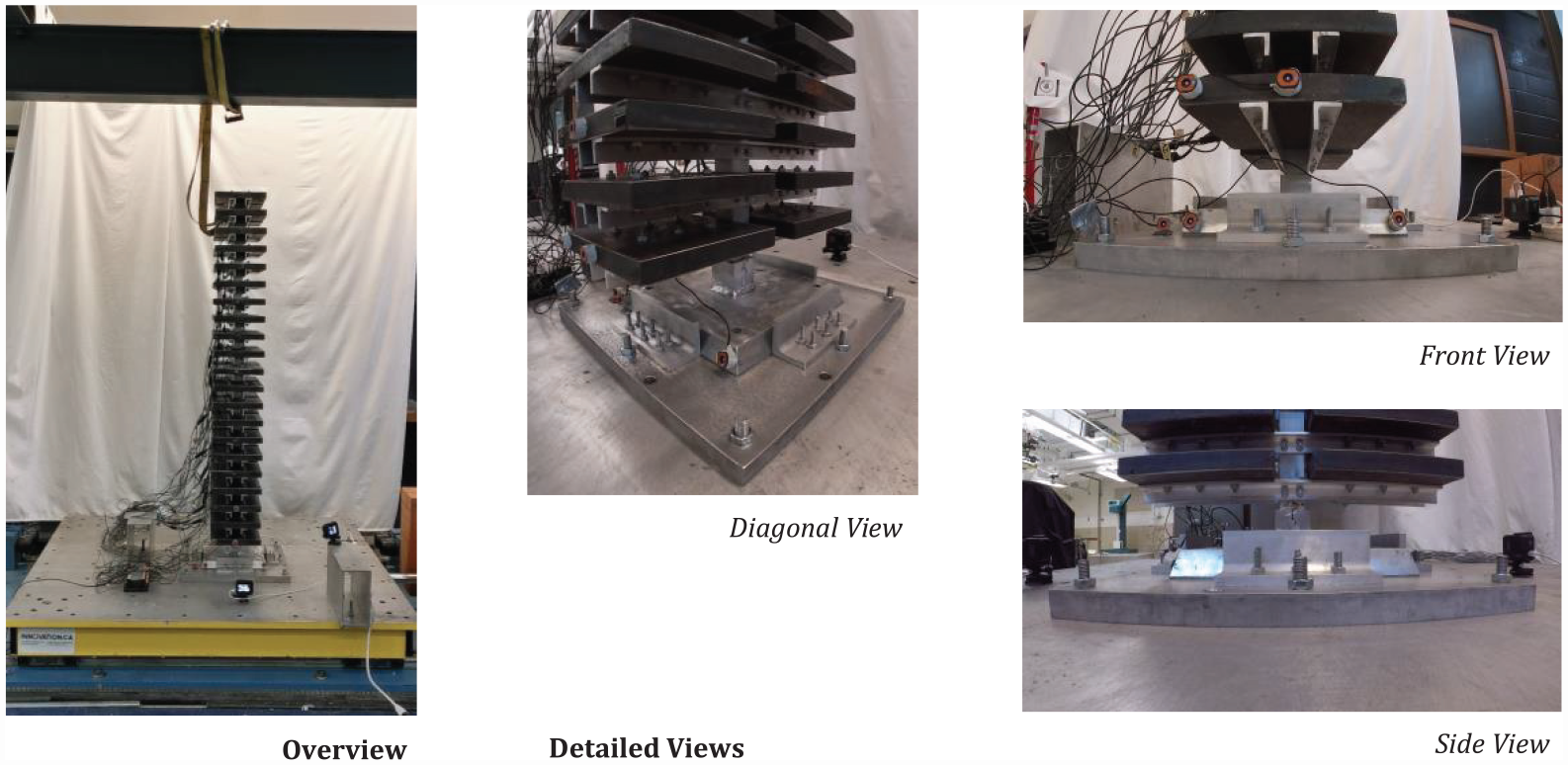
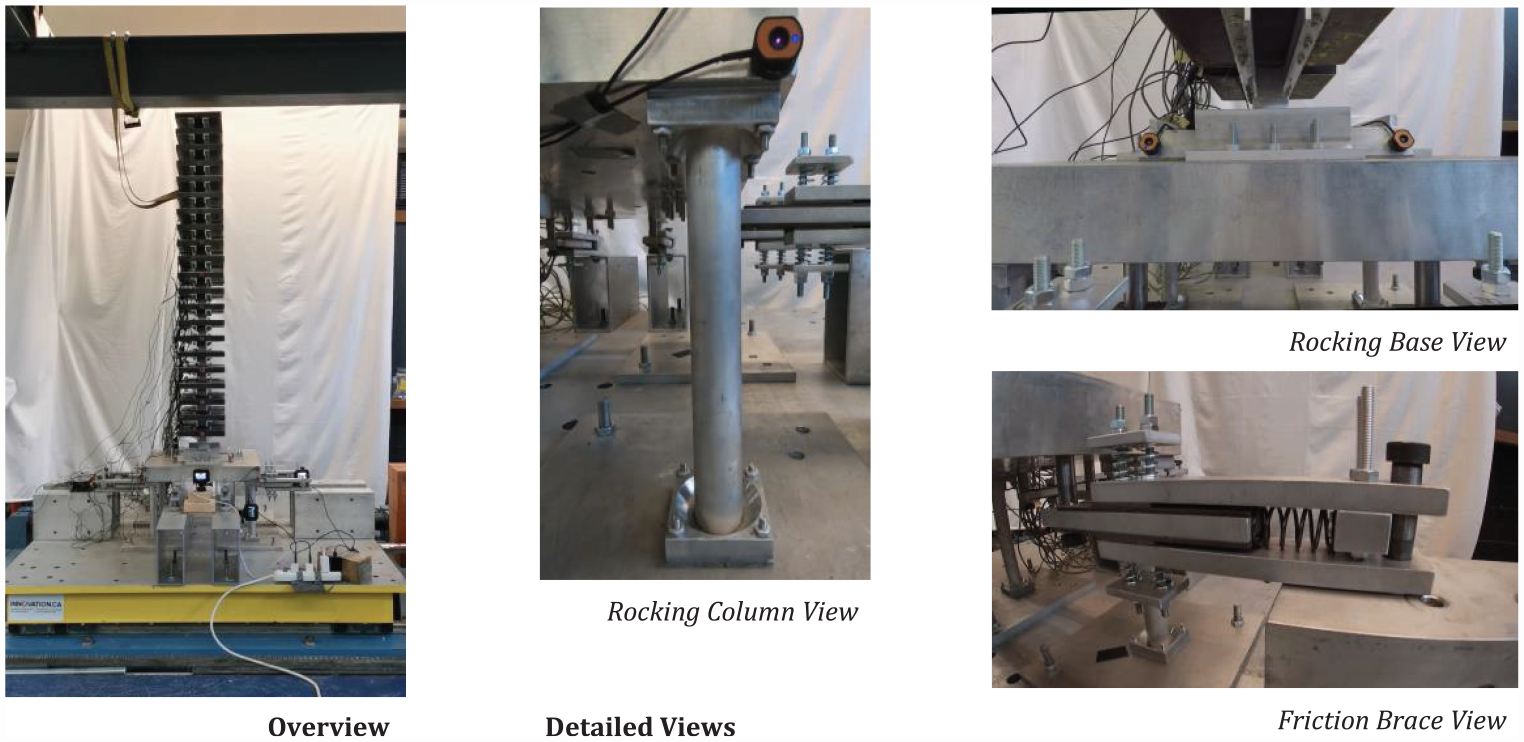
In order to examine the numerical predictability of slender MDOF structures with base-rocking mechanisms, the superstructure of the test specimen was designed based on a typical west-coast benchmark tall building that has been extensively studied (MacKay-Lyons et al., 2018; Moehle et al., 2011; Molina Hutt et al., 2022; Tong and Christopoulos, 2020; Yang et al., 2012; Zhong and Christopoulos, 2022a). In addition, the base mechanisms were designed to exhibit an elastic rocking response and full recentering capabilities such that the specimen would not sustain damage and allow for a quick reset after each test, allowing for a large pool of ground motion (GM) excitations to be applied. An overview of the shaking table specimen is shown in Figure 1. The specimen consists of a 1.5-m-tall aluminum hollow structural section (HSS) tower with a total seismic weight of 3600 N distributed along its height at 21 levels, which resulted in a fundamental period of 0.98 s in both principal horizontal directions. Details of this specimen can be found in the fabrication drawings uploaded as part of the data set. The design and scaling of the tower superstructure of the specimen presented in Figure 1 followed a higher-mode similarity method discussed in detail by Zhong and Christopoulos (2023a) to enable measurable higher-mode effects similar to that in a typical RC core-wall tall building, by specifically maintaining the ratios of dynamic amplification factors in each mode between the specimen and the benchmark tall building. The base of the HSS tower was welded to a square aluminum base plate that would rock on top of either (1) a free-standing foundation plate with peripheral shear keys for the free-rocking test configuration or (2) a previously proposed shear-controlling rocking-isolation podium (SCRIP) base mechanism (Zhong and Christopoulos, 2022a) for the controlled-rocking test configuration. The free-rocking base provided a rocking moment resistance of approximately 400 Nm at the base without any hysteretic energy–dissipating mechanism, whereas the SCRIP system provided an additional control on the base shear resistance at about 600 N with a frictional energy–dissipating mechanism. Details about the design and characteristics of these mechanisms are discussed in Zhong and Christopoulos (2023b). Figure 2 presents photographs of the specimen on the shaking table with the two base mechanisms.
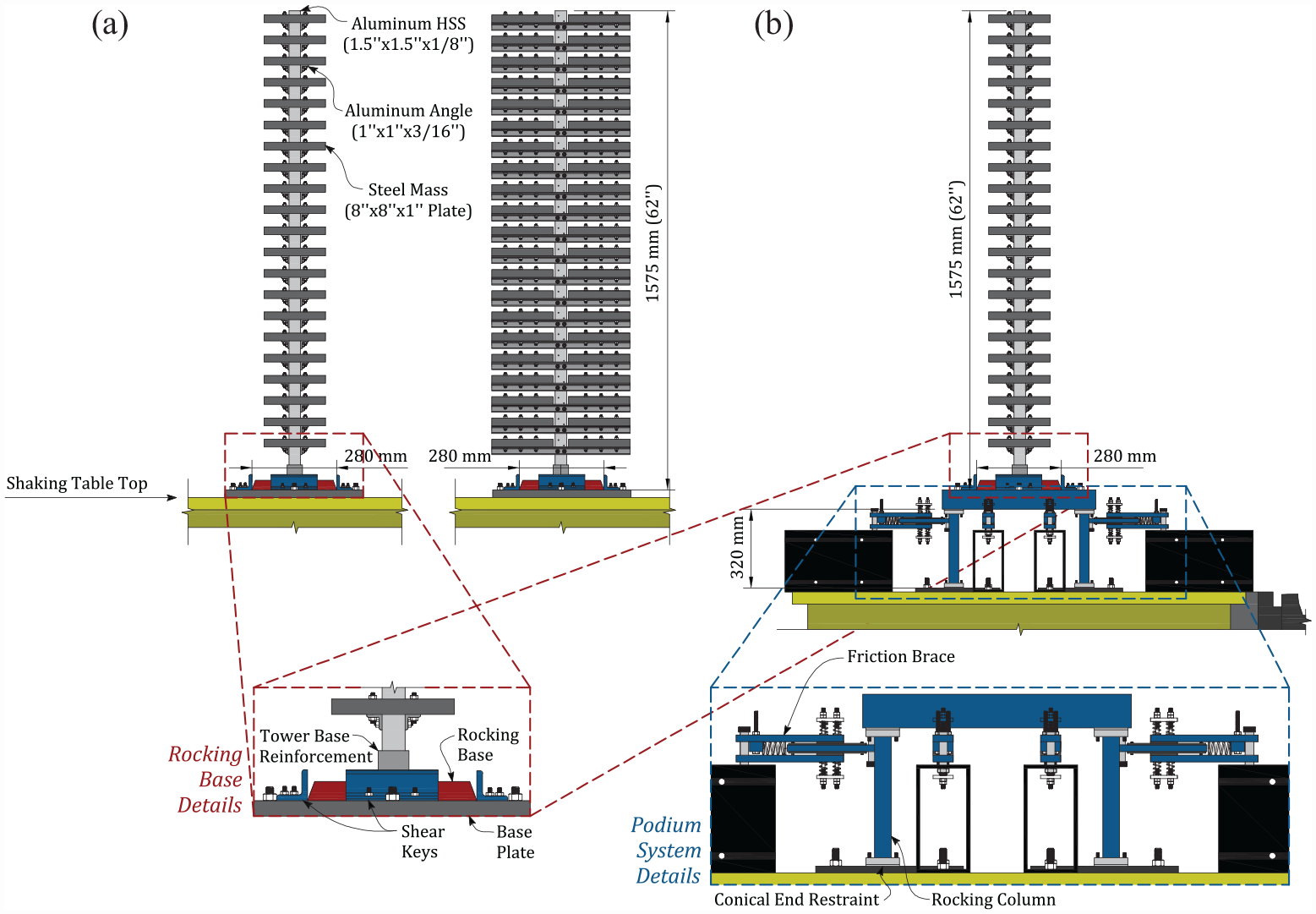
Overview of the shaking table tests: (a) specimen with a free-rocking base mechanism and (b) specimen with a controlled-rocking SCRIP base mechanism.
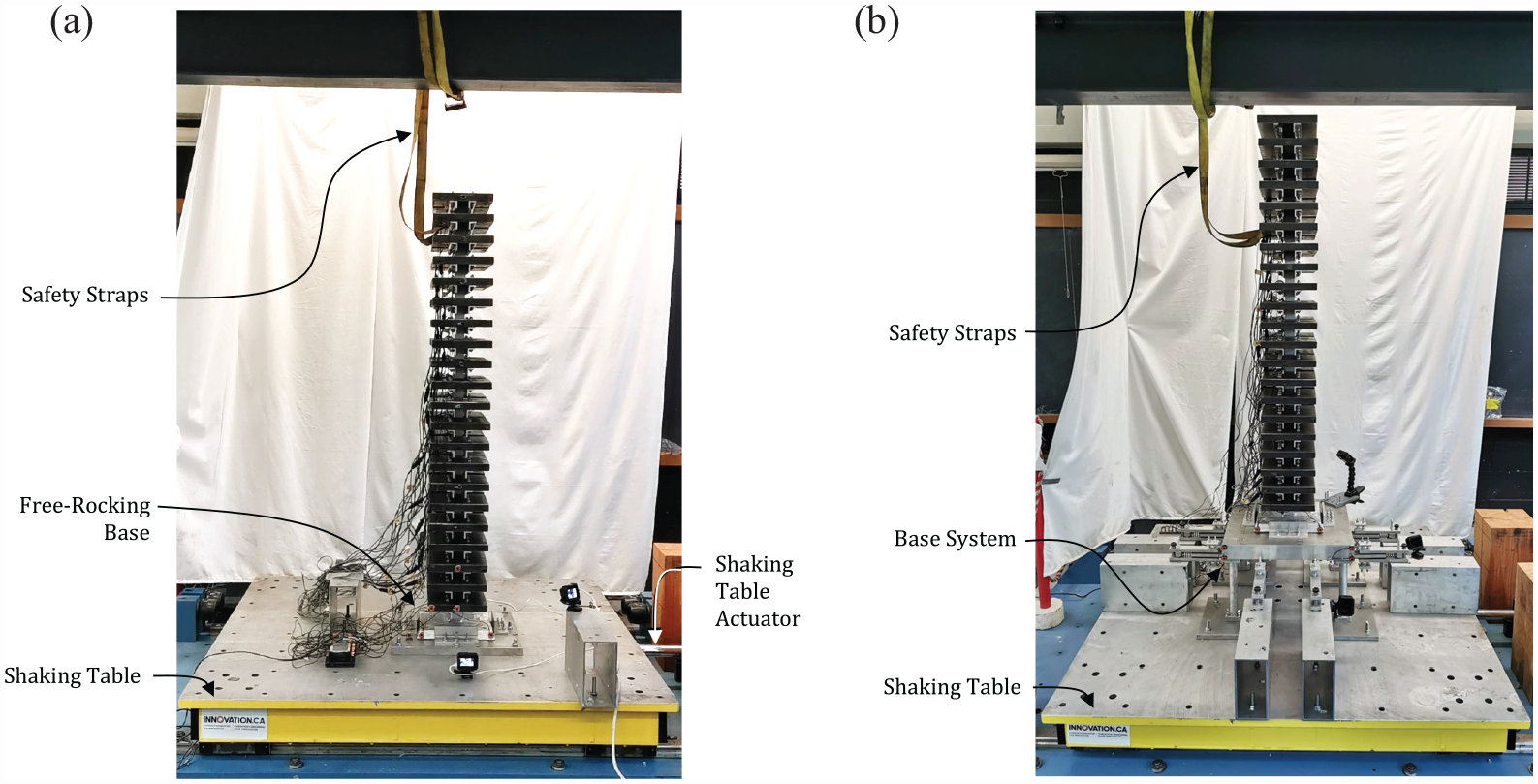
Photograph of the shaking table specimen: (a) with a free-rocking base mechanism and (b) with a controlled-rocking SCRIP base mechanism.
Input GM excitations
The shaking table tests used 100 spectral-compatible synthesized GM excitations generated from one seed GM (shown in Figure 3a), based on a spectral-based stochastic GM model (Broccardo and Dabaghi, 2017; Broccardo and Der Kiureghian, 2014; Rezaeian and Der Kiureghian, 2008; Vassiliou et al., 2021a, 2021b, 2021c). Scaling of the seed GM followed an approach to achieve similarity in terms of higher-mode effects between the specimen and the reference structure by maintaining the relative ratios of spectral accelerations among the first three modes (Zhong and Christopoulos, 2023a). Figure 3b plots the 5%-damped elastic response spectra of the input GM excitations that were applied to the shaking table during tests (these spectra were computed using the recorded GM on the shake table during each test).
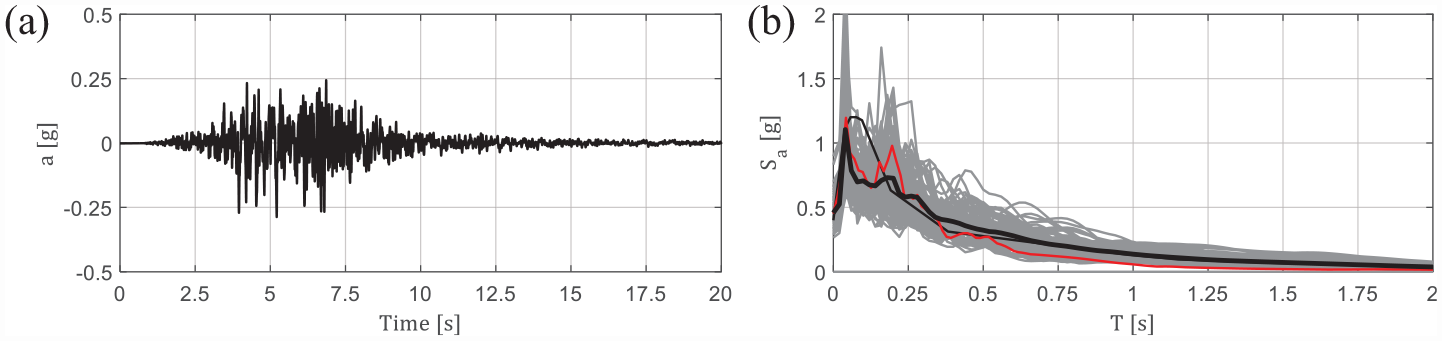
(a) Seed ground motion and (b) measured, mean measured, and original 5%-damped elastic response spectra of input ground motion excitations.
Testing protocol
Frequency characterization tests were first performed to determine the natural frequencies of the specimen using an artificial white noise excitation with equal intensity up to 30 Hz. This was repeated before and after each change in specimen configurations to monitor any change in the specimen properties during earthquake tests. This resulted in tests T1, T129, T130, and T258 as shown in Table 1.
List of the frequency characterization tests
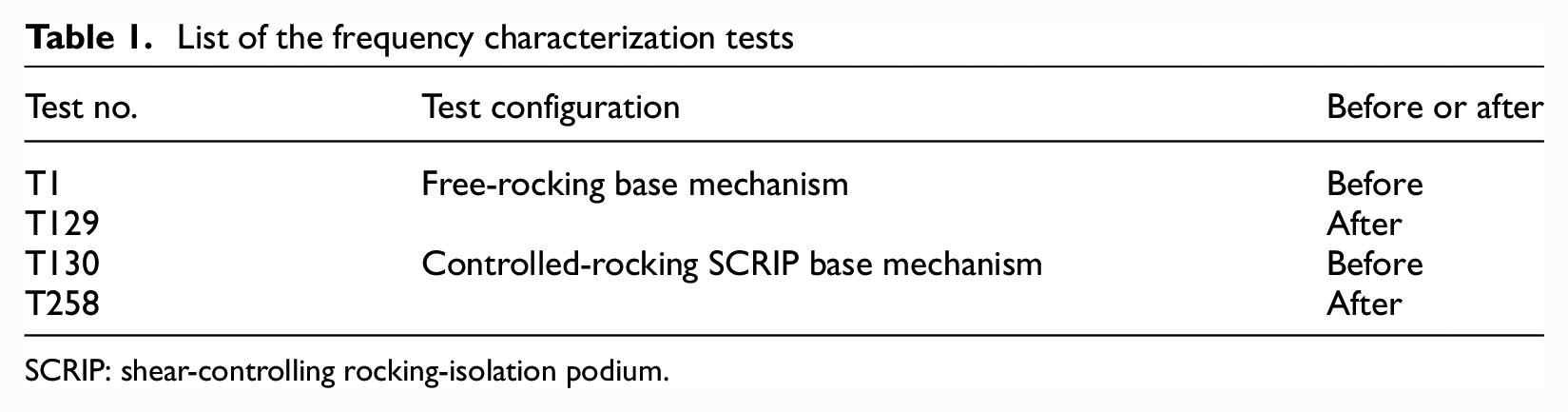
SCRIP: shear-controlling rocking-isolation podium.
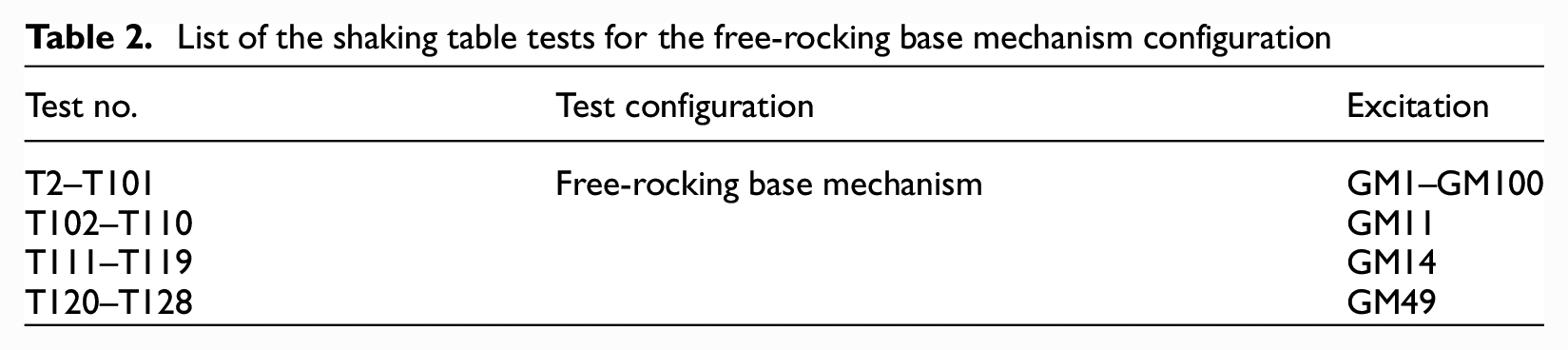
Next, shaking table tests using the 100 synthetic GMs were performed on the specimen with a free-standing rocking base configuration and an uncoupled free-rocking and controlled-shear base configuration, as illustrated in Figures 1 and 2. GMs GM11, GM14, and GM49 were used several times to check the repeatability of tests under the same GM excitations. This resulted in tests T2-T128 (for the free-standing rocking base configuration) shown in Table 2 and T131-T257 (for the controlled-rocking SCRIP base configuration) shown in Table 3.
List of the shaking table tests for the free-rocking base mechanism configuration
List of the shaking table tests for the controlled rocking SCRIP base mechanism configuration
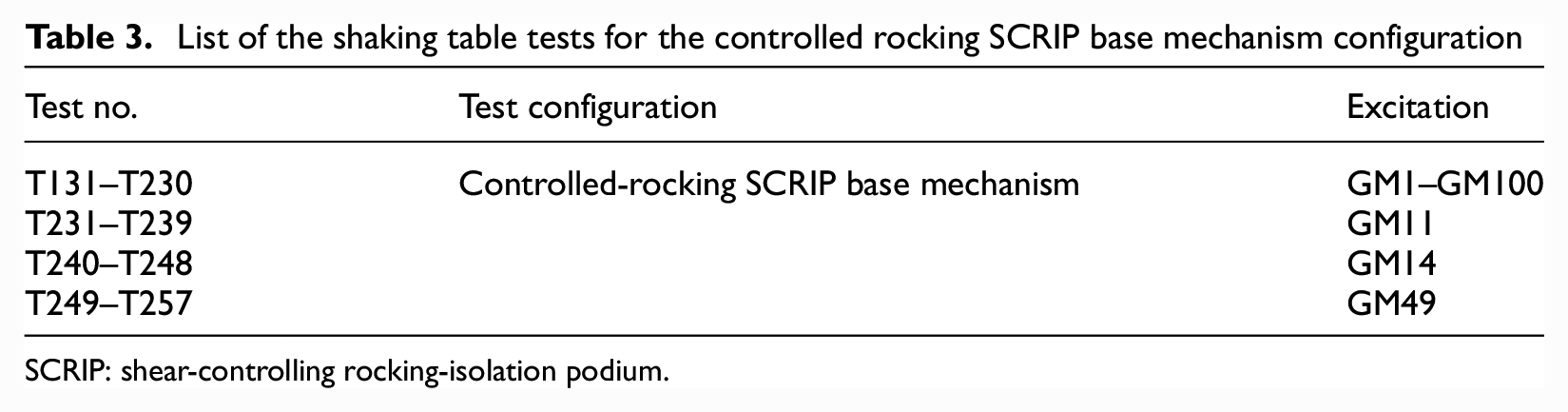
SCRIP: shear-controlling rocking-isolation podium.
Instrumentation
Displacement and acceleration measure
Figure 4 shows the location of the displacement and acceleration measuring instruments used in the shaking table tests and included in the data set. The numbering of these instruments was consistent between the two test configurations. Light-emitting diode (LED) markers were used to track the 3-dimensional displacements at (1) the shaking table surface (M0), (2) alternating levels of the HSS tower (M1 to M10), (3) two ends of the rocking base (M11 and M12), and (4) edges of the podium slab face (M13 to M17) for the uncoupled free-rocking and controlled-shear base configuration. The 3D movements of the LED markers were tracked using a Nikon K610 optical coordinate measuring machine at its maximum sampling rate of 50 Hz. The displacement of the shaking table platform was also recorded by the linear variable displacement transducer (LVDT) within the shaking table actuator at a sampling rate of 300 Hz.
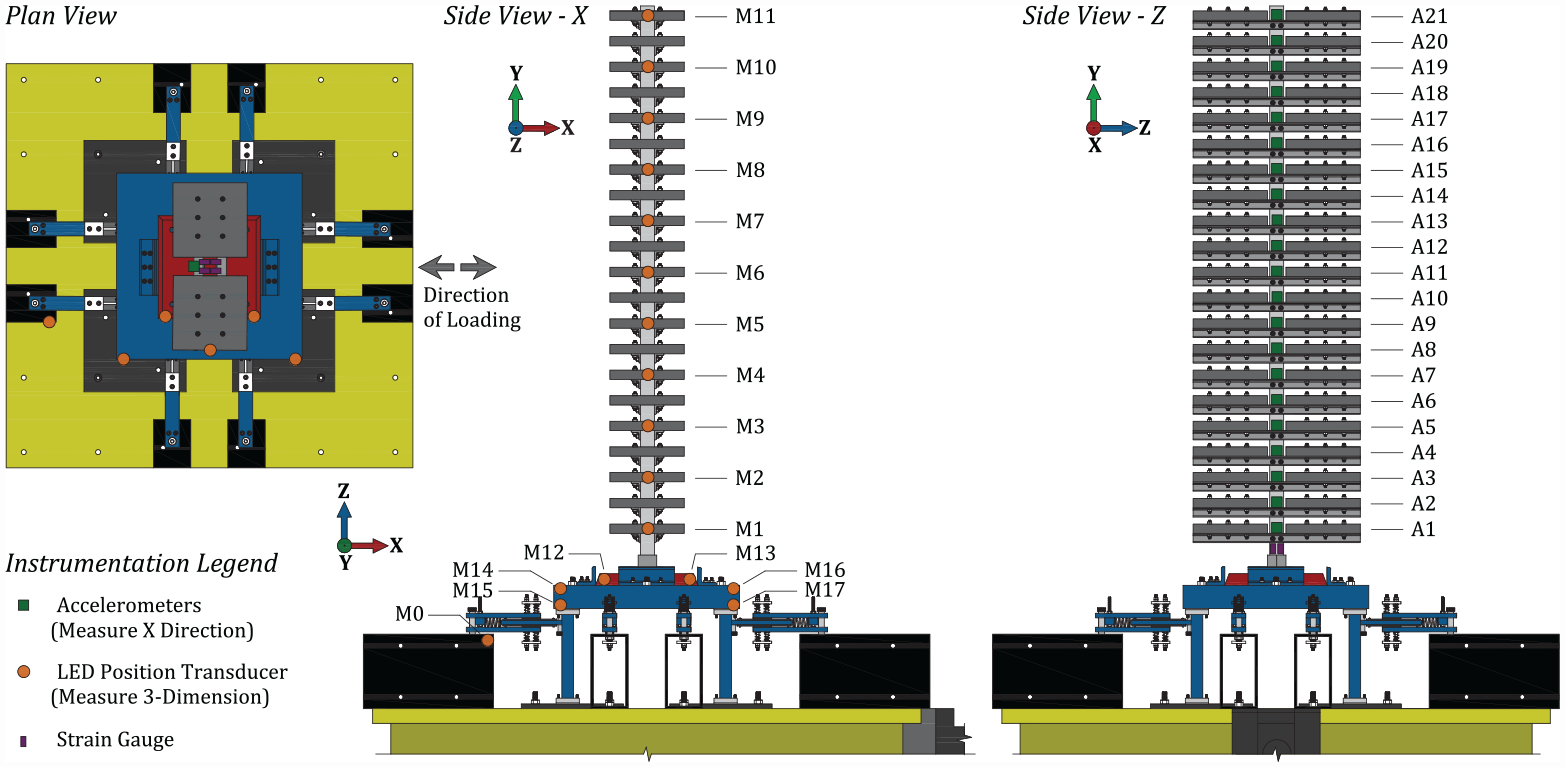
Locations of displacement and acceleration measuring instruments.
The horizontal accelerations of the tower specimen in the direction of the loading were measured by the ICSensors’ ICS3150 accelerometers mounted at every level of the tower specimen where seismic masses were installed. The accelerometers were set to a measuring range of ±10 g. The sampling rate was 300 Hz, and the acquired data were filtered to remove noise above 30 Hz.
Photos and video recordings
Photos of the specimen were taken regularly before, in between, and after the tests. Videos of each test were recorded using multiple cameras to capture different views. Due to the large size of the videos, only selected photos and videos are included in the data set. Figures 5 and 6 present typical views of the recorded videos for tests of the free-standing rocking base configuration and the uncoupled free-rocking and controlled-shear base configuration, respectively.
Typical views of the recorded videos for tests of the free-rocking base mechanism configuration.
Typical views of the recorded videos for tests of the controlled rocking SCRIP base mechanism configuration.
Test data set
Organization of the data set
The test data set is publicly available for download at Borealis (Zhong and Christopoulos, 2022b). The data set contains six compressed files in ZIP format that are (1) the recorded displacement input and acceleration of each shaking table test, (2) the recorded and filtered accelerometer measurements, (3) the recorded 3D movements of the LED markers, (4) the selected test videos, (5) drawings of the specimens, and (6) selected photos of the specimen. Figure 7 provides an overview of the data organization at Borealis (Zhong and Christopoulos, 2022b).
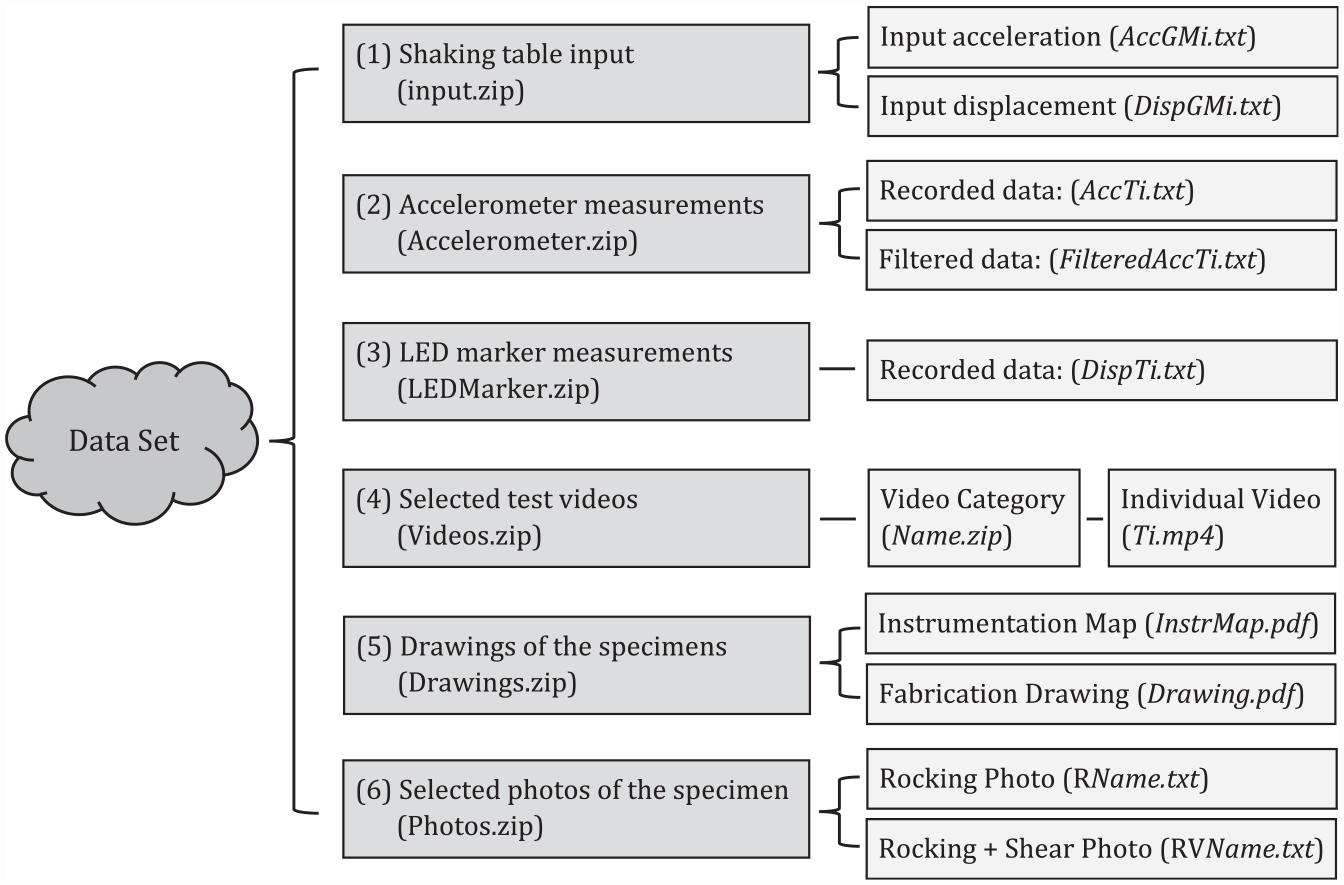
Overview of the data organization.
Acceleration data
The recorded and filtered acceleration time history records from all tests are provided as text files. The files are named AccGMi.txt for input GM excitations and AccTi.txt for the accelerometer measurements, where i is the test number indicated in Tables 1 to 3. Within each AccGMi.txt file, the first and second columns are the time in seconds and the acceleration in units of the acceleration of gravity g, respectively. For each AccTi.txt file, each column is the accelerometer measurements in units of the acceleration of gravity g, from columns 1 to 21 for accelerometer A1 to A21 shown in Figure 4.
Displacement data
The input displacement time history records from all tests are provided as text files named DispGMi.txt. The recorded 3D movements of LED markers are provided as text files named DispTi.txt. For each file, the first column is the time in seconds, following each of the three columns that correspond to the position of each marker along the x, y, and z directions in millimeters (e.g. columns 2 to 5 are x, y, and z directions of marker M0, columns 6 to 8 are x, y, and z directions of marker M1, and columns 9 to 11 are x, y, and z directions of marker M2, etc.). The marker locations are indicated in Figure 4.
Example of derived data
This section discusses the example results of frequency characterization tests and shaking table tests under the GM14 excitation that was repeated several times to check the repeatability of tests under the same GM excitations.
Figure 8 plots the results of the frequency characterization tests listed in Table 1. In each case, the power spectra are generated from the accelerometer A21 installed on the roof. Based on the spectral peaks, the frequencies of the first three modes for the free-standing rocking base configuration were approximately 1.00, 6.72, and 17.90 Hz, respectively. As for the uncoupled free-rocking and controlled-shear base configuration, the frequencies of the first two modes were approximately 0.97 and 6.69 Hz, respectively, whereas the third mode frequency was not obvious due to lower spectral amplitudes at higher frequencies.
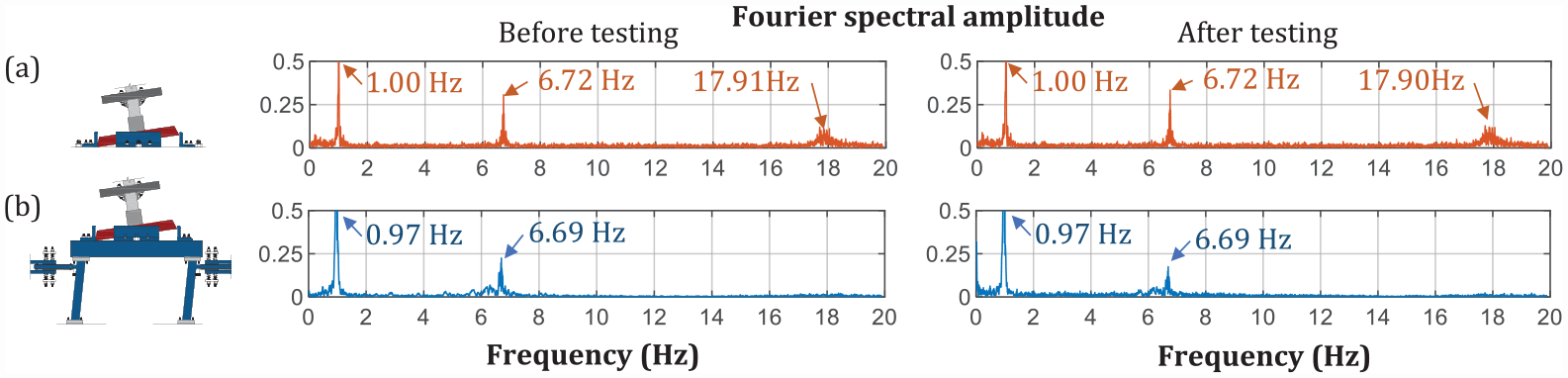
Power spectra of accelerometer A21 on the roof for frequency characterization tests in (a) the free-rocking base mechanism configuration and (b) the controlled rocking SCRIP base mechanism configuration.
Figure 9 plots the outcomes of five repeatability tests (T111 to T115) for the free-standing rocking base configuration under excitation GM14. The base shear and overturning moment (OTM) response histories calculated from the recorded accelerometer measurements (A1 to A21) are presented, as well as the displacement history at the roof level as recorded by the LED marker (M11) at the roof level. The recorded rocking uplift response of the rocking mechanism (from LED marker M12 and M13) is also plotted. For each of the response parameters, results are plotted with offsets for clarity.
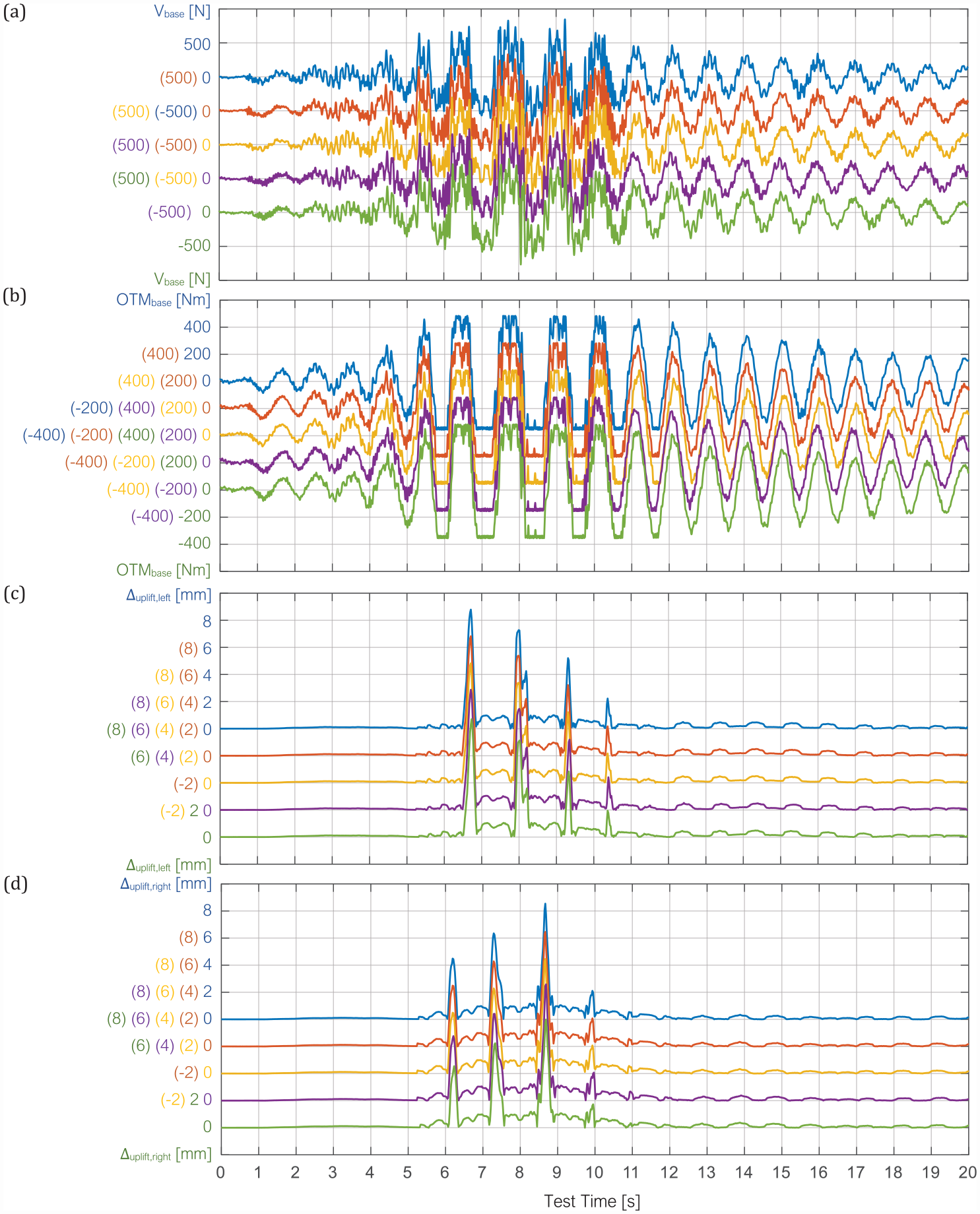
Repeatability test results under excitation GM14 (tests T111 to T115) for the free-rocking base mechanism configuration: (a) base shear history, (b) base OTM history, (c) rocking uplift history (left edge), and (d) rocking uplift history (right edge).
Figure 10 plots the outcomes of five repeatability tests (T240 to T244) for the uncoupled free-rocking and controlled-shear base configuration under excitation GM14, in a similar manner as Figure 9. In addition, the recorded lateral displacement response of the controlled-shear base mechanism (from LED marker M14) is plotted.
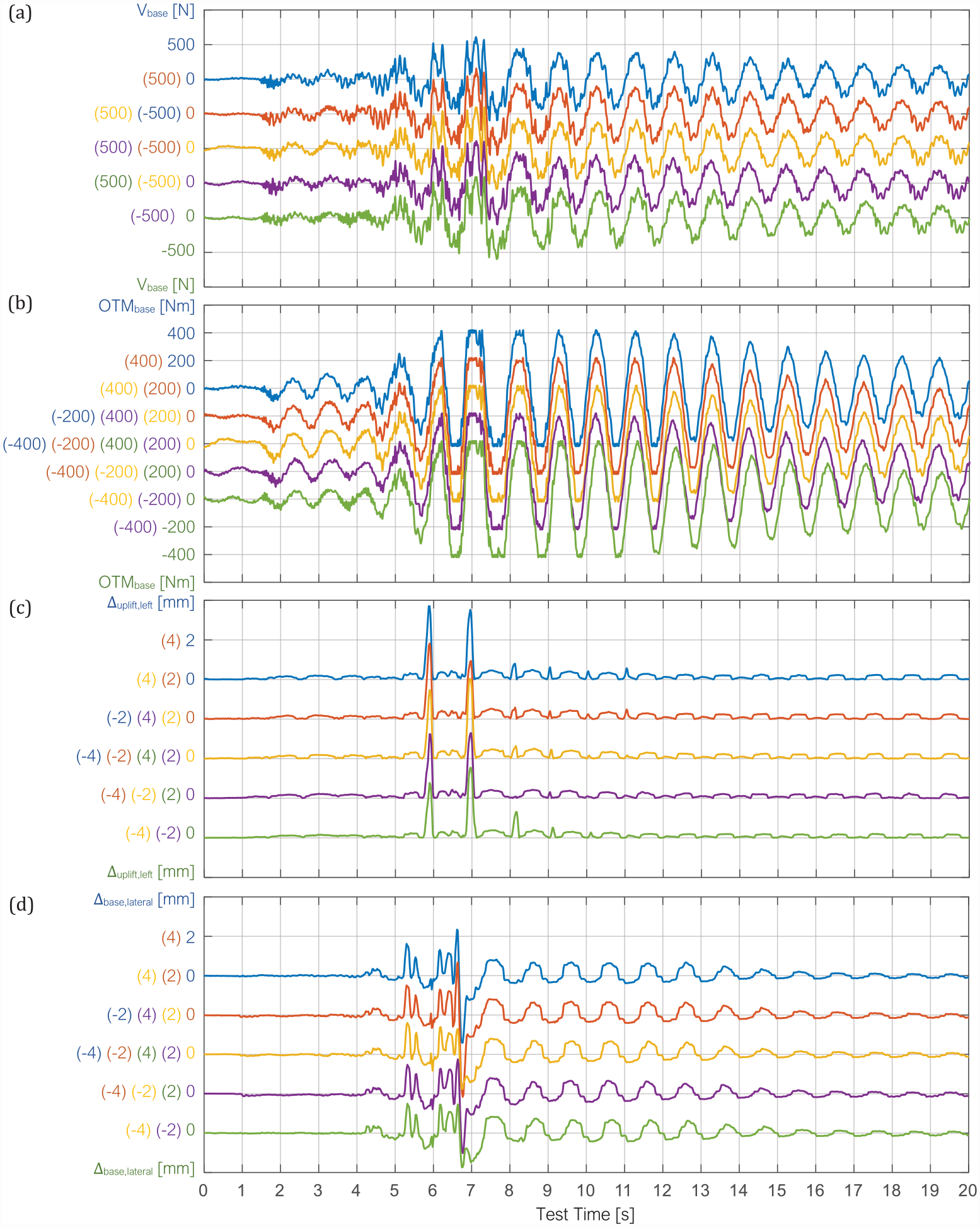
Repeatability test results under excitation GM14 (tests T240 to T244) for the controlled rocking SCRIP base mechanism configuration: (a) base shear history, (b) base OTM history, (c) rocking uplift history (left edge), and (d) lateral displacement history of the shear mechanism.
As illustrated in Figures 9 and 10, test results showed good repeatability under the same GM excitation for both test configurations. Similar observations were made from the results of the other two repeatability test series under excitations GM11 and GM49. These results suggest that for MDOF base-rocking structures whose dynamic response is dominated by the dynamic characteristics of the superstructure (thereby minimizing the influence of the modeling of the rocking mechanisms), their seismic response under a particular GM excitation was found to be repeatable despite the highly nonlinear behavior of rocking mechanisms involved as the main inelastic mechanisms. This is contrary to the reports from other studies where it was found that rocking motion could be unrepeatable, although further investigations are required to verify and further generalize this observation.
Data use
The main purpose of the data set discussed in this article is to provide publicly available experimental data that can be used to evaluate the predictability of the seismic response of slender MDOF structures using base-rocking mechanisms as the main seismic-resisting systems and to allow the validation of numerical and analytical models developed for these types of structures. Because the tested structure was scaled based on a reference tall building, validated models using this data set could be used to infer the seismic behavior of tall buildings that utilize base mechanisms to mitigate the seismic response of the slender superstructure (Christopoulos and Zhong, 2022), such as rocking base (Kurama et al., 1999; Priestley et al., 1996; Stanton et al., 1993), base isolation (Becker et al., 2015; Calugaru and Panagiotou, 2014; Komuro et al., 2005, among others), and combined flexural and shear dual base systems (Kent et al., 2022; Tong and Christopoulos, 2020; Zhong and Christopoulos, 2022a, 2023c).
Since the results of repeatability tests showed good consistency for the selected GM excitations, they can be used for initial model calibration. The data set presented herein can then be used to compare modeling methodologies based on both deterministic and statistical approaches and potentially simplify some modeling assumptions while maintaining reasonable accuracy. Furthermore, the data set can be used to study the relative importance of the different modeling parameters on the overall model predictability, as well as that of the different GM characteristics on the seismic response of slender MDOF structures with base mechanisms.
Concluding remarks
This data paper introduces a publicly available data set obtained from extensive shaking table tests on a slender MDOF structure with two different base-rocking mechanisms: (1) a free-rocking base mechanism and (2) a controlled rocking SCRIP base mechanism. The purpose of the data set is to serve as a benchmark for the validation of numerical models used to predict the seismic response of slender MDOF structures that rely on base mechanisms to dissipate seismic energy. This data set is intended to contribute toward a better understanding of the dynamic behavior of slender MDOF rocking structures and to develop numerical models that are more accurate and less computationally demanding. Further studies are planned to investigate the numerical predictability of slender MDOF rocking structures and the experimental repeatability of the dynamic response of rocking structures in general. These efforts will hopefully accelerate a wider application of rocking structural systems in practice.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The financial support of the Natural Sciences and Engineering Research Council of Canada (NSERC) is gratefully acknowledged.