
Abstract
In automated laboratories consisting of multiple different types of instruments, scheduling algorithms are useful for determining the optimal allocations of instruments to minimize the time required to complete experimental procedures. However, previous studies on scheduling algorithms for laboratory automation have not emphasized the time constraints by mutual boundaries (TCMBs) among operations, which is important in procedures involving live cells or unstable biomolecules. Here, we define the “scheduling for laboratory automation in biology” (S-LAB) problem as a scheduling problem for automated laboratories in which operations with TCMBs are performed by multiple different instruments. We formulate an S-LAB problem as a mixed-integer programming (MIP) problem and propose a scheduling method using the branch-and-bound algorithm. Simulations show that our method can find the optimal schedules of S-LAB problems that minimize overall execution time while satisfying the TCMBs. Furthermore, we propose the use of our scheduling method for the simulation-based design of job definitions and laboratory configurations.
Keywords
Introduction
Automating experimental procedures in life science is important for stabilizing quality, saving cost, and improving efficiency. For instance, thermal cyclers were invented to automate the complicated PCR procedures that had previously required manual transfer of labware between water baths. 1 Recent advances in mechanical engineering and robotics have enabled the automation of more advanced and complex experimental procedures in the life sciences through the development of specialized instruments for large-scale genome editing, 2 library preparation for next-generation sequencing (NGS), 3 cell culture,4–6 omics measurements,7,8 and high-throughput assays.9–12 Automating these kinds of advanced experimental procedures reduces the cost of training human operators, dependency on experts, and the burden of repeating procedures. On the other hand, multipurpose instruments (e.g., liquid handling workstations and dual-arm humanoid robots) have also been actively developed because they offer the flexibility to carry out various kinds of experiments.13–16 However, despite the development of these laboratory automation instruments, one generally needs to use several different types of instruments to execute even one procedure composed of multiple steps17,18 because a single instrument is rarely capable of performing all the steps in the procedure.
When coordinating multiple types of instruments to execute procedures, it is often essential to reduce the execution time required to complete the procedures while avoiding resource conflicts. We can formulate this as a scheduling problem, such as the job shop problem19,20 and its variants. In scheduling problems for automated laboratories, the procedure is divided into operations that are processed by multiple instruments in a given order. 21 The objective of the scheduling problem is to find a schedule that allocates instruments to each operation so that all procedures are completed in a short execution time without resource conflicts. Several scheduling approaches have been proposed for laboratory automation in, for example, image-based cellular assays, 22 clinical blood tests, 23 bacterial engineering, 24 protein crystallization, 25 high-throughput screening, 26 and materials research. 27 Most of these scheduling algorithms fall into two categories: rule-based algorithms and mathematical optimization algorithms. Rule-based algorithms are specifically designed for specific scheduling problems and are easy to understand for users.23,24,27 For instance, Delaney et al. developed a dynamic scheduling method that selects the operation with the earliest prescribed time among the uncompleted operations as the next operation for execution. 24 Likewise, Burger et al. scheduled tasks so that the robot starts the oldest queued job on instruments in parallel. 27 In contrast, mathematical optimization algorithms aim to find an optimal schedule for minimizing the entire execution time. In particular, metaheuristic algorithms, a group of stochastic search algorithms that balance intensification and diversification strategies, 28 have been widely applied to scheduling problems in laboratory automation.25,26,29 For example, Cabrera et al. applied simulated annealing to scheduling plate imaging of protein crystallization. 25 Recently, genetic algorithms have been used for scheduling complex life science workflows in laboratory infrastructure composed of distributed automation systems connected by robot transporters and human operators.26,29 However, these scheduling methods do not guarantee the global optimality of the solution because they are based on metaheuristic algorithms,25,26,29 partly due to the computational burden of exact algorithms for mathematical optimization problems, that are guaranteed to find the global optimal solution.
Previous work on scheduling algorithms for laboratory automation has not focused on the time constraints by mutual boundaries (TCMBs) among operations. A TCMB is the upper limit of the time difference between the start or end (boundary) of an operation and the boundary of another. 21 For example, a TCMB can be used to represent a situation such as where operation B must be started within 10 min after operation A ends. These kinds of TCMBs exist widely in life science experiments.30–32 In particular, procedures involving live cells or unstable biomolecules (e.g., RNA or enzymes) require strict time constraints to avoid alteration, denaturation, or degradation of the samples. Therefore, scheduling methods for use in the life sciences need to ensure that solutions satisfy the TCMBs.
In this study, we defined the “scheduling for laboratory automation in biology” (S-LAB) problem as a scheduling problem in which operations with TCMBs are performed by multiple different instruments. We formulated the S-LAB problem as an instance of the mixed-integer programming (MIP) problem and proposed a scheduling method using the branch-and-bound algorithm, an exact algorithm for MIP problems. By performing a scheduling simulation, we demonstrated that our method can find optimal schedules of S-LAB problems that minimize overall execution time while satisfying the TCMBs. Furthermore, we also proposed the use of our scheduling method for designing job definition and laboratory configuration.
Materials and Methods
Definition of Terms
Protocol: A description of how to complete a procedure. A protocol is composed of multiple experimental steps.
Experimental step: The smallest unit in a protocol.
Job: The counterpart to a procedure in a scheduling problem. A job is composed of a series of operations.
Operation: The smallest unit for scheduling in a job. An operation consists of one or more experimental steps and is processed by an instrument.
S-LAB Problem
We formulated the S-LAB problem based on the job shop problem, one of many classical scheduling problems.19,20 In the job shop problem, there are (1) multiple types of instruments and (2) jobs consisting of multiple operations processed in a certain order. Each operation has a process time and a type of instrument that processes it. The objective of the job shop problem is to find a schedule that allocates instruments to each operation so that all jobs are completed in the minimum execution time without resource conflicts.
We formulated the S-LAB problem for an automated laboratory composed of multiple instruments as follows (
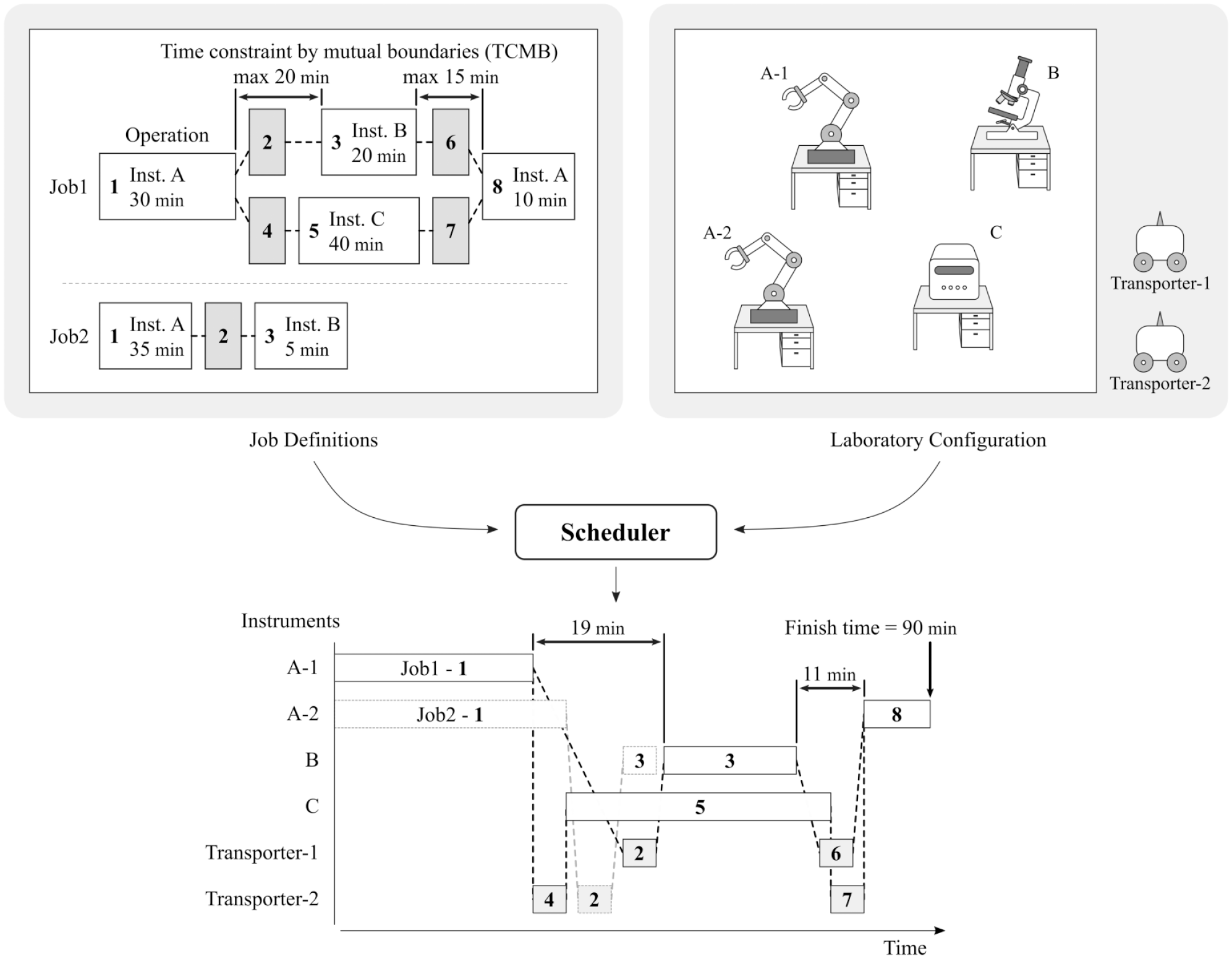
Overview of the S-LAB problem.
Job Definition
There are M instruments in a laboratory, each of which has an instrument type Tm (1 ≤ m ≤ M, 1 ≤ Tm ≤ K), where K is the number of different instrument types.
There are J jobs.
The j-th (1 ≤ j ≤ J) job is composed of Nj operations. In total, there are
The a-th operation Oa (1 ≤ a ≤ N) has a compatible instrument type Ca (1 ≤ Ca ≤ K); that is, Oa needs to be processed by an instrument m with the instrument type Tm = Ca.
Oa has process time τa, which is intrinsically determined by the combination of the nature of the operation and the instrument type Ca to process it.
There are dependencies among operations; that is, one operation must start after another ends. The operation dependency graph P is a directed acyclic graph, in which each node represents an operation and each directed edge represents the dependency between a pair of operations:
There must be a buffer time between a pair of operations consecutively processed on the same instrument. The length of the buffer time β (β > 0) is determined by the user.
Each instrument has parking positions through which an instrument passes samples to transporters or receives them from transporters. Here, we assume that each instrument has a sufficient number of parking positions so that samples can wait if the instrument is occupied by another operation.
Scheduling Solutions
A schedule is defined by determining the start time Sa and the processor Ea for each Oa.
Ea (1 ≤ Ea ≤ M) is the instrument that processes Oa, chosen from the set of compatible instruments that have the type Tm = Ca.
Constraints
When multiple instruments are allocated to multiple operations, one instrument can process at most one operation at a time.
The order of operations defined by P needs to be maintained.
There are I TCMBs. The i-th (1 ≤ i ≤ I) TCMB sets the upper limit αi of the maximum tolerable difference between the start or end time of each of a pair of operations Oa and Ob. If a TCMB is specified as the difference between the start times of two operations, then
Objective
Based on these definitions and constraints, a scheduling method attempts to find the optimal schedule that minimizes the entire execution time of the jobs, that is, the end time of the lastly processed operation
The objective of our method is to minimize this value, as in
Formulation as a MIP Problem
We formulate the S-LAB problem as an instance of the MIP problem and propose a scheduling method using the branch-and-bound algorithm. 33 The branch-and-bound algorithm is an exact algorithm, which is guaranteed to find a global optimal solution, for MIP problems. To search for the optimal solution efficiently in the solution space, the branch-and-bound algorithm recursively prunes (narrows) the solution space so that the algorithm can avoid performing an exhaustive search. For details of the problem formulation as a MIP problem and the branch-and-bound algorithm, see Supplemental Material Sections 1 and 2.
Implementation
We implemented the proposed scheduling method for the S-LAB problem in the Julia language,34,35 using JuMP.jl 36 and Cbc.jl, a Julia API for an open-source MIP solver named Cbc. 37 The code is available at https://github.com/labauto/SLab.jl.
Results
To validate the utility of the proposed method, we simulated the scheduling of several jobs having typical properties observed in real biological experiments. We formulated these experimental procedures as S-LAB problems and solved the problems using the proposed method. We set β = 1.0 min for all the simulations below. We conducted these simulations on a computer with an Intel Core i7-8700K CPU.
Scheduling Jobs with Various Time Constraints
Dealing with TCMBs is an important aspect of the S-LAB problem. Let us consider scheduling several jobs with TCMBs in a laboratory equipped with three types of instruments (
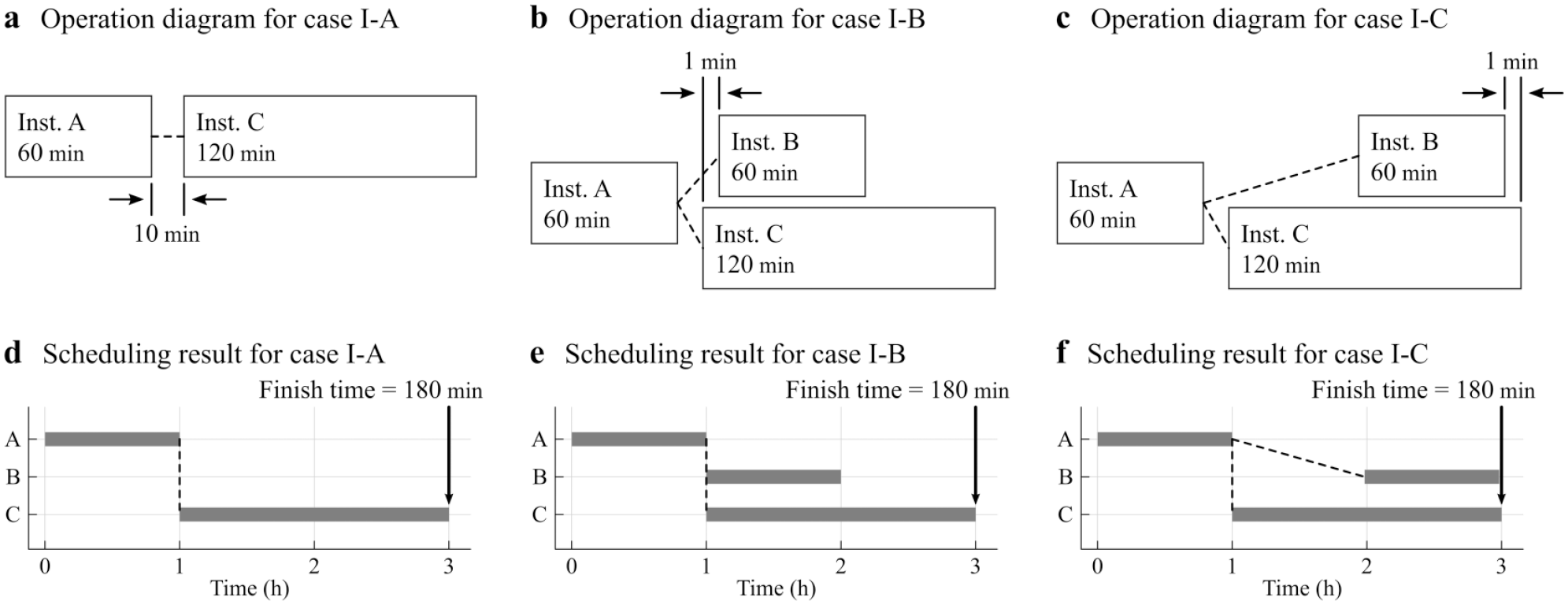
Scheduling with different types of time constraints: case I. (
Scheduling Jobs with Branching and Convergence
In some life science experiments, the protocols might have branching dependencies in which multiple experimental steps depend on the same preceding step or converging dependencies in which an experimental step depends on multiple preceding steps. For example, an instrument might produce two or more samples delivered to distinct instruments for succeeding experimental steps. Optimizing the schedules for these kinds of protocols, which contain branching and converging dependencies, is more difficult than scheduling serial protocols without these dependencies. 38
We therefore tested whether our scheduling method is applicable to such protocols. We formulated a protocol based on that used by Gu et al.,
26
which is for a high-throughput screening involving coordination of multiple instruments, as an S-LAB problem (
Fig. 3a
,
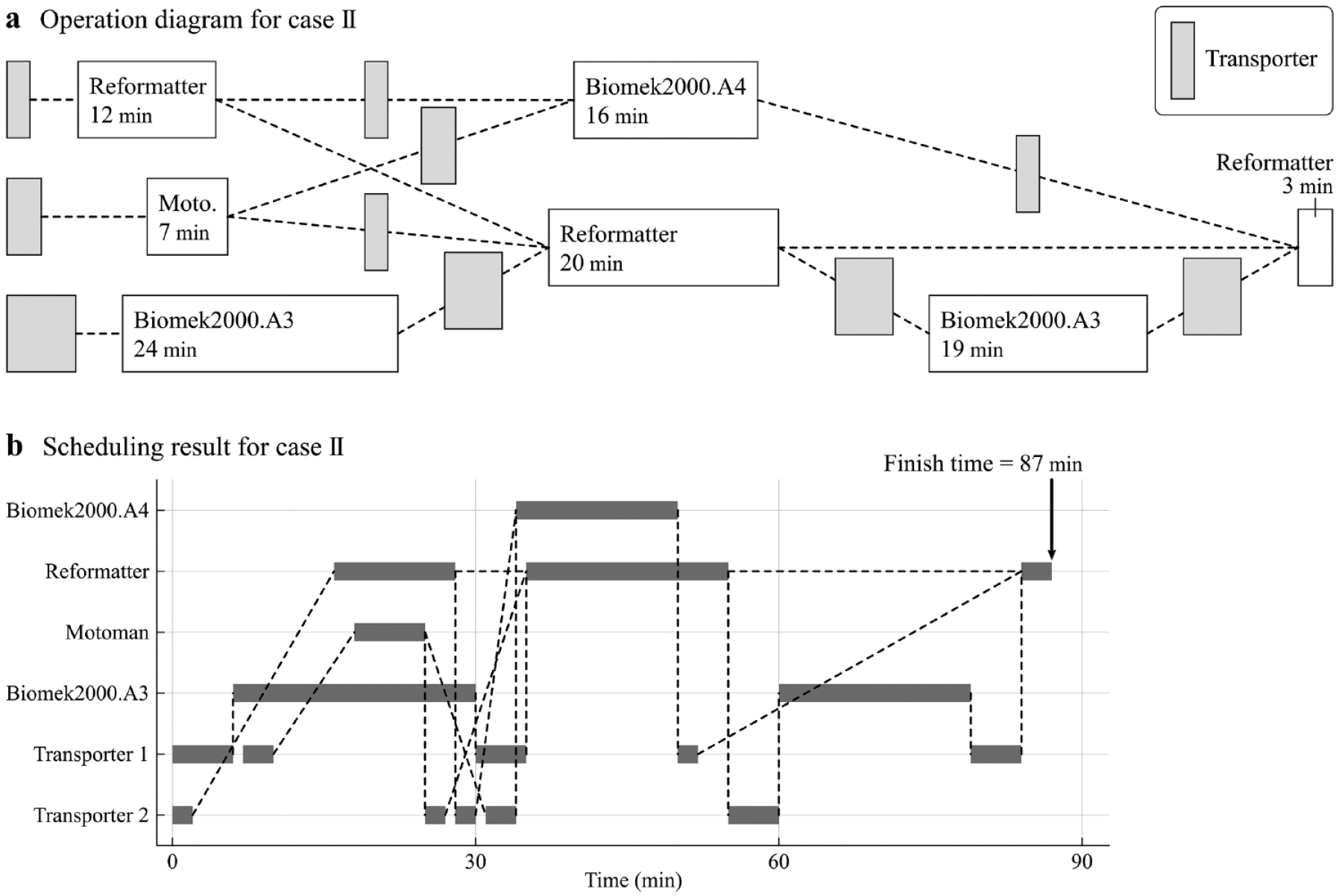
Scheduling of S-LAB problem with branched operation dependencies: case II. (
Simulation-Based Job Design
Modern biological laboratories are often equipped with integrated workstations capable of processing multiple kinds of experimental steps as well as specialized instruments for particular experimental steps. In this kind of laboratory, there might be multiple options for selecting which type of instrument to use to process each operation. For example, although a workstation may be able to process several experimental steps as a single operation, it may alternatively be possible to use multiple specialized instruments to process the same steps as multiple separate operations. This kind of variation in job design may affect the execution time of a job, and it may be possible to shorten the execution time of a procedure by altering the job design.
To address this possibility, we simulated the scheduling of a procedure in two different job designs—one using only a single automated workstation (case III-A) (
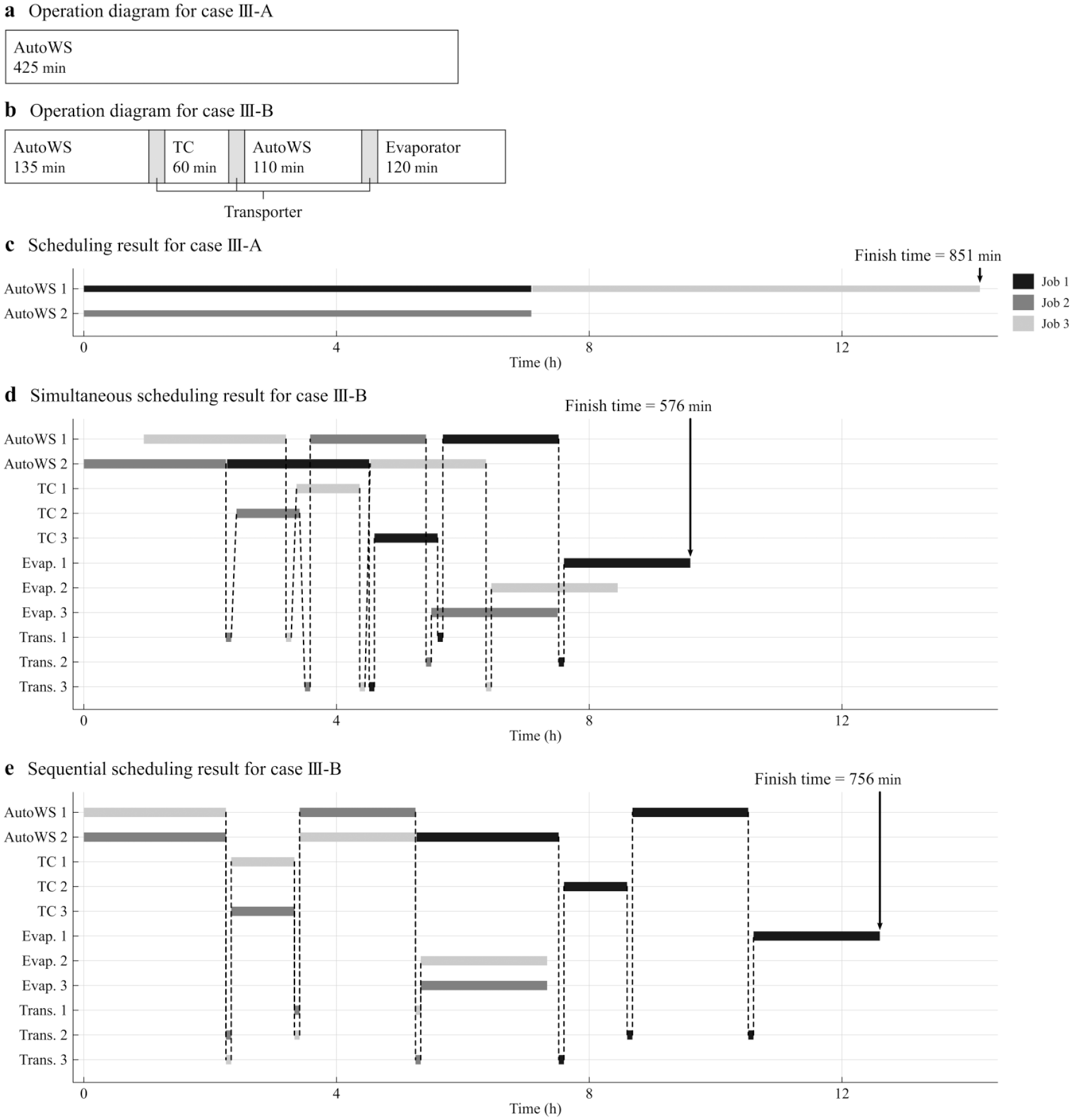
Simulation-based job design through scheduling: case III. (
We simulated a situation in which three instances of the job were executed. Figure 4c shows the scheduling results for case III-A. It took 851 min to complete the three jobs. Figure 4d shows the scheduling results for case III-B, in which we scheduled the three jobs simultaneously, whereas Figure 4e shows the results of the same case, but the three jobs were scheduled sequentially. When simultaneously scheduled, the jobs took 576 min, or 68% of the time in case III-A. In contrast, when sequentially scheduled, the jobs took 756 min, or 89% of the time in case III-A. The computation times were 1.0, 1.4 × 102, and 1.1 s for cases III-A, III-B (simultaneous), and III-B (sequential), respectively. These results suggest that job designs affect the throughput, but simultaneous scheduling of multiple jobs is important to fully enjoy the benefit.
Simulation-Based Laboratory Configuration Design
The execution time of procedures can also be reduced by modifying the laboratory configuration, including the types and numbers of instruments. For example, it is reasonable to expect that jobs can be executed in less time if there are more instruments. However, the trade-off between the cost and benefits of adding new instruments needs to be evaluated in advance based on the expected throughput improvement of adding more instruments. Therefore, we next consider the use of scheduling simulations to evaluate the throughput improvement of different laboratory configurations.
To test this possibility, we scheduled the same jobs using different laboratory configurations by changing the number of instruments. We prepared a job definition composed of five operations, each of which is processed by different types of instruments A, B, C, D, and E (
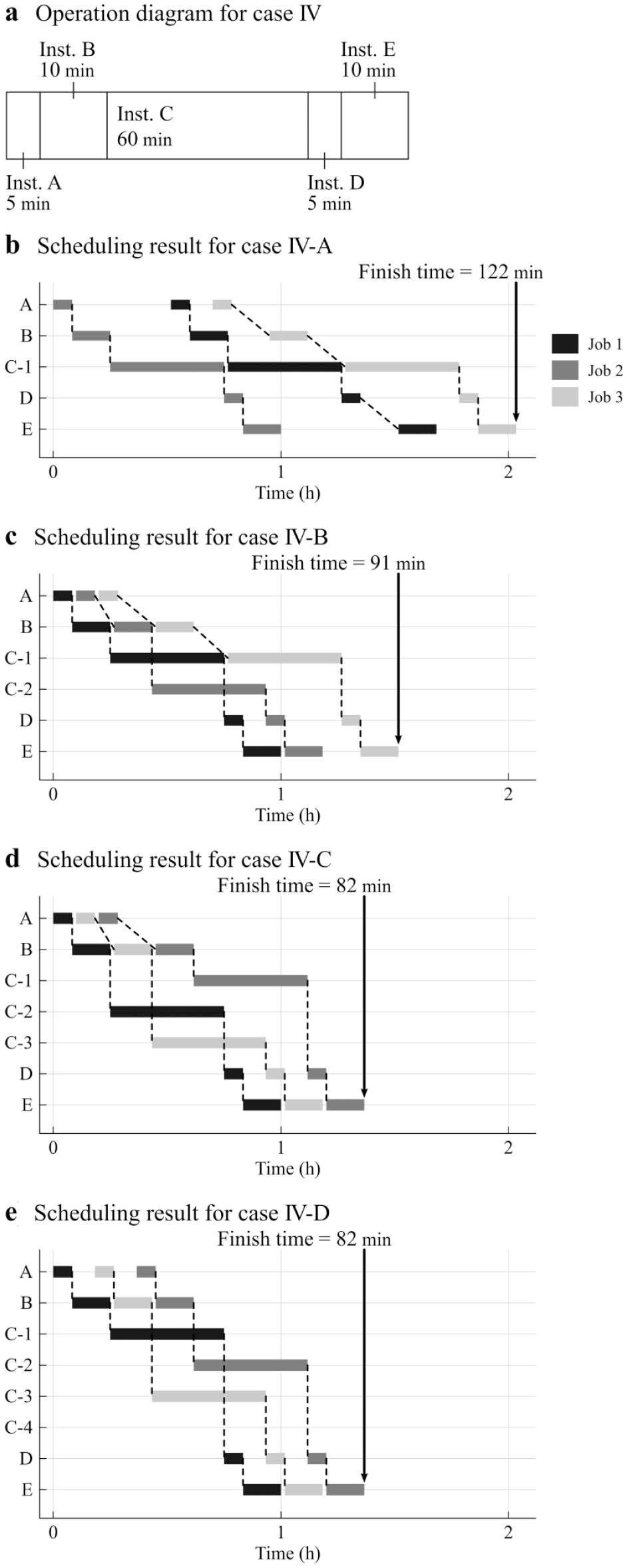
Laboratory configuration design by simulation: case IV. (
Discussion
In this study, we formulated the S-LAB problem as an instance of the MIP problem. S-LAB problems are scheduling problems for life science experiments using multiple types of instruments with TCMBs among operations. We proposed a scheduling method for determining optimal schedules for S-LAB problems based on the branch-and-bound algorithm (
We further applied this method to evaluate the effect on the throughput of different job designs of a procedure (
Fig. 4
) or increasing the number of instruments to parallel bottleneck operations (
Previous studies have employed metaheuristic algorithms for scheduling,25,26,29 partly due to the lower computational cost compared with exact algorithms. We showed that the branch-and-bound algorithm, an exact algorithm for MIP problems, was able to determine an optimal schedule for the S-LAB problems at a reasonably low computational cost. However, because we did not exhaustively evaluate various kinds of S-LAB problems, it might be possible that our method cannot determine an optimal solution for other S-LAB problems with a small computational time, which is particularly important for simulating multiple job designs and laboratory configurations. In such a case, the calculation might need to be stopped in the middle to obtain a tentative solution.
There are several possible directions for improving the proposed method. The first is support for more flexible time constraints. For example, in Autoprotocol, a descriptive language for experimental protocols, one can specify not only a lower and upper bound, but also a flexible cost function on the time difference between two operations. 41 Although allowing this kind of flexible constraint makes the optimization problem more difficult, it may decrease the number of cases in which S-LAB problems have no feasible solutions. The second is support for different optimization criteria. In this study, we used the throughput as the only optimization criterion for scheduling, but there can be different criteria, like quality of results or cost of experiments. In the future, it would be useful to incorporate such different multiple criteria in S-LAB scheduling. The third is dynamic scheduling. Instrument malfunctions and human errors can interrupt procedures or limit the availability of resources, forcing the reallocation of instruments to pending operations. A dynamic scheduling method has been proposed to deal with this kind of situation 42 and might be integrated with our method. Fourth, there is the problem of deciding which type of instrument to use to process an operation. In this study, the compatible instrument type for each operation was predetermined in the job definition. However, there are cases in which the same operation can be processed by different types of instruments. In the future, it would be useful to automatically determine which type of instrument to use for each operation by considering the availability of resources and the performance of each instrument type. Fifth, the method for evaluating the effect on the throughput of increasing the number of instruments can be improved. In this study, we evaluated the execution time of a fixed amount of jobs and showed that the effect saturates at some point ( Fig. 5 ). However, it is important to evaluate the amount of jobs processed per unit time in the future because, when more instruments are available, more jobs can generally be executed by exploiting the increased resources. We note that this corresponds to the contrast between Amdahl’s law 43 and Gustafson’s law 44 in parallel computing: when evaluating the throughput improvement by multiple processors, the former uses the execution time of a fixed amount of workload and the latter uses the amount of workload processed per unit time.
By using the proposed scheduling method considering TCMBs, automated laboratories can improve the efficiencies of a wider range of life science experiments involving the use of multiple different types of instruments. Likewise, the idea of simulation-based evaluation using the scheduling method is expected to contribute to the design of job definitions and laboratory configurations in the future. In conclusion, this study could help the realization of laboratory automation in the life sciences by enabling sophisticated coordination of multiple different types of automation instruments.
Supplemental Material
sj-pdf-1-jla-10.1177_24726303211021790 – Supplemental material for Optimal Scheduling for Laboratory Automation of Life Science Experiments with Time Constraints
Supplemental material, sj-pdf-1-jla-10.1177_24726303211021790 for Optimal Scheduling for Laboratory Automation of Life Science Experiments with Time Constraints by Takeshi D. Itoh, Takaaki Horinouchi, Hiroki Uchida, Koichi Takahashi and Haruka Ozaki in SLAS Technology
Footnotes
Acknowledgements
We thank T. Mitsuyama and K. Kai for helpful discussions and G. N. Kanda for assistance in project administration.
Supplemental material is available online with this article.
Declaration of Conflicting Interests
The authors declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: H.U. is an employee of Tecan Japan Co., Ltd., which might benefit financially from increased scientific use of the Freedom EVO NGS workstation. T.D.I., T.H., K.T., and H.O. have filed for a patent on related technology.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the JST-Mirai Program (grant number JPMJMI18G4).
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.