
Abstract
Purpose:
To evaluate a newly developed system for dynamic analysis of gait kinematics and muscle activity.
Methods:
We recruited 10 healthy men into this study. Analyses of three-dimensional motion and wireless surface electromyogram (EMG) were integrated to achieve synchronous measurement. The participants walked continuously for 10 min under two conditions: comfortable and quick pace. Outcome measures were joint angles of the lower limbs determined from reflective markers and myoelectric activity of trunk and lower limbs determined from EMG sensors, comparing comfortable and quick gait pace.
Results:
Lower limb joint angle was significantly greater at the quick pace (maximum flexion of the hip joint: 4.1°, maximum extension of hip joint: 2.3°, and maximum flexion of the knee joint while standing: 7.4°). The period of maximum flexion of the ankle joint during a walking cycle was 2.5% longer at a quick pace. EMG amplitudes of all trunk muscles significantly increased during the period of support by two legs (cervical paraspinal: 55.1%, latissimus dorsi: 31.3%, and erector spinae: 32.6%). EMG amplitudes of quadriceps, femoral biceps, and tibialis anterior increased significantly by 223%, 60.9%, and 67.4%, respectively, between the periods of heel contact and loading response. EMG amplitude of the gastrocnemius significantly increased by 102% during the heel-off period.
Conclusion:
Our gait analysis synchronizing three-dimensional motion and wireless surface EMG successfully visualized dynamic changes in lower limb joint angles and activity of trunk and lower limb muscles induced by various walking speeds.
Introduction
Analyses of three-dimensional (3D) motion and electromyography are used to evaluate activity of daily living, including gait and standing, and motion in sports. In particular, gait motion analysis is useful to evaluate dynamic change while walking in degenerative diseases, deformity, and sport-related injury of the spine and the lower limbs. 1 –6 However, methods for gait motion analysis have not been fully established. We developed a method to analyze dynamic changes of kinematics and muscle activity accurately. Validation of the data obtained by the present gait analysis system is essential for further exploration of this system. The aim of the present study was to evaluate our newly developed system for dynamic analysis of gait kinematics and muscle activity. For this purpose, synchronized dynamic changes in lower limb joint angles and activity of the trunk and lower limb muscles in healthy individuals were analyzed at comfortable and quick walking speeds using the present gait analysis system.
Materials and methods
Participants
After approval of our study design by the ethics committee at the University of Tsukuba (H26-144) in accordance with the Declaration of Helsinki, we recruited 10 healthy, injury-free male volunteers into the present study. Written informed consent was obtained from all volunteers for their participation and publication of this report. The mean age of the participants was 23 years (range 22–25 years).
3D motion and wireless surface electromyogram analysis
3D motion was analyzed using a Vicon MX system (Vicon, Oxford, UK), which comprised 16 cameras set in our gait analysis room and 26 reflective markers variously attached on the participant’s head, spine, pelvis, and upper and lower limbs.
Wireless surface electromyograms were acquired using a Delsys Trigno Lab System (Delsys, Boston, Massachusetts, USA), which comprised 12 electromyogram (EMG) sensors variously attached to the trunk and lower limb muscles bilaterally, including the cervical paraspinal, latissimus dorsi, erector spinae, quadriceps, femoral biceps, tibialis anterior, and gastrocnemius. 3D motion and wireless surface EMG analysis were integrated to achieve synchronous measurement (Figure 1).

(a) Frontal view of a participant equipped with reflective markers and (b) back view equipped with wireless surface EMG sensors of trunk muscles in the gait analysis room.
Gait protocol
The participants were asked to walk for 10 min continuously at a comfortable pace around a rotary walkway that comprised two 10-m straight paths and two semicircular paths of approximately 1-m radius, and then rest. Subsequently, the participants walked for 10 min continuously at a quick pace.
Outcome measures
We calculated joint angles of lower limbs from reflective markers. The parameters obtained are defined as follows. Hip angle is the angle between the line connecting the reflective markers on the anterior superior iliac spine (ASIS) and the posterior superior iliac spine (PSIS) and the line connecting the reflective markers on the greater trochanter and the lateral femoral condyle. Knee angle is the angle between the line connecting the reflective markers on the greater trochanter and the lateral femoral condyle and the line connecting the reflective markers on the lateral femoral condyle and lateral malleolus. Ankle angle is the angle between the line connecting the reflective markers on the lateral femoral condyle and lateral malleolus and the line connecting the reflective markers on the heel and toe. We acquired myoelectric activity of trunk and lower limb muscles during gait from EMG sensors.
EMG data were normalized according to the detected walking cycles. The acquired kinetic data sequence was separated into each walking cycle using heel strikes of the right foot, and then averaged for each walking cycle to obtain representative values for the kinetic term of each walking cycle. To evaluate gait-induced kinetic changes, we compared each of the kinetic variables between the averaged values from earlier steps and those from later steps. Paired t tests were used to evaluate differences between comfortable and quick gaits. Data were analyzed using IBM SPSS Statistics, version 24. p < 0.05 was considered statistically significant.
Results
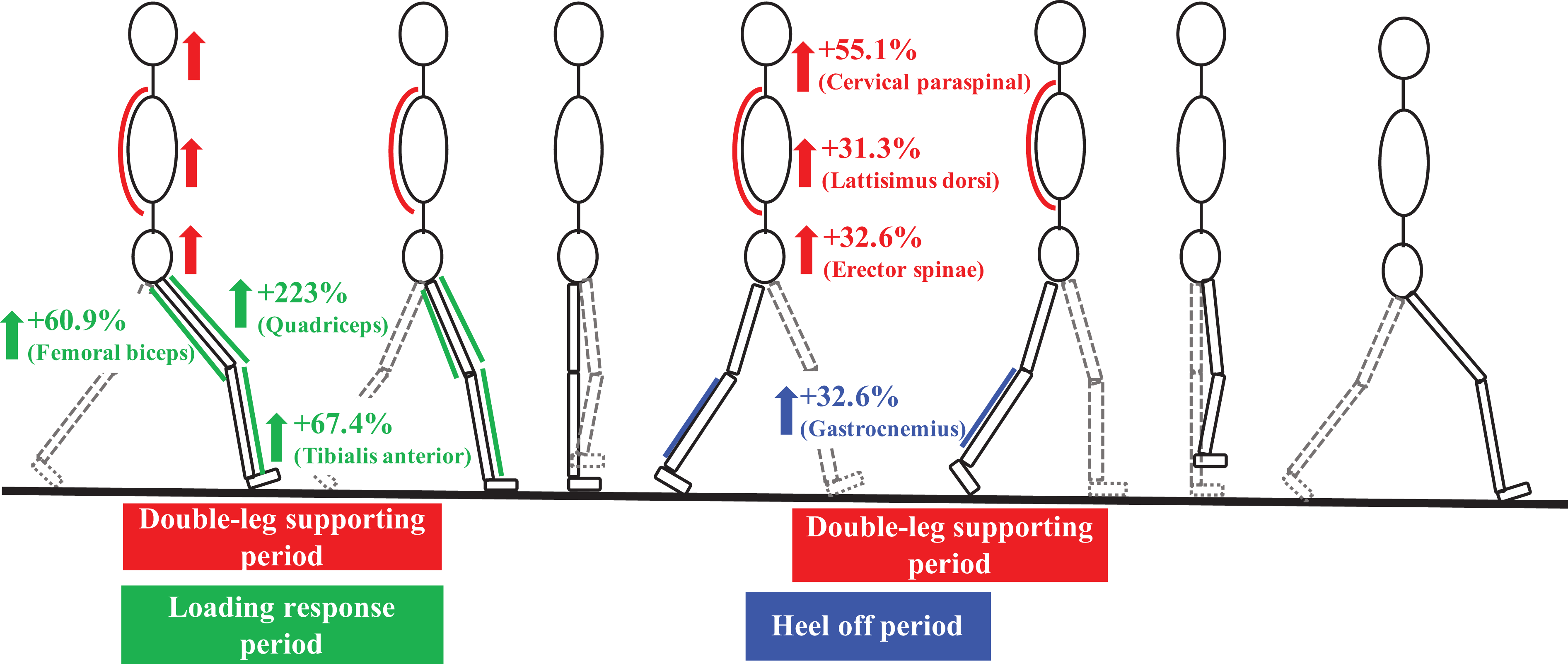
Maximum flexion angle of the hip joint at the quick pace was significantly larger (4.1°) than at the comfortable pace (p < 0.001). Maximum extension angle of the hip joint at the quick pace was significantly larger (2.3°) than at the comfortable pace (p < 0.001). Maximum flexion angle of the knee joint during the standing period at the quick pace was significantly larger (7.4°) than at the comfortable pace (p < 0.001). The period of maximum flexion of the ankle joint at the quick pace was 2.5% longer for a walking cycle than at the comfortable pace (p < 0.01; Figure 2). EMG amplitudes of the cervical paraspinal, latissimus dorsi, and erector spinae at the quick pace increased significantly by 55.1% (p < 0.01), 31.3% (p < 0.05), and 32.6% (p < 0.01), respectively, compared with those at the comfortable pace (Figure 3). EMG amplitudes of all trunk muscles increased during the period of support by both legs. EMG amplitudes of quadriceps, femoral biceps, and tibialis anterior at the quick pace increased significantly by 223% (p < 0.05), 60.9% (p < 0.01), and 67.4% (p < 0.01), respectively, compared with those at the comfortable pace. These EMG amplitudes increased from a heel contact period to a loading response period. EMG amplitude of the gastrocnemius at the quick pace increased significantly by 102% at the heel-off period compared with that at the comfortable pace (p < 0.01; Figure 4).
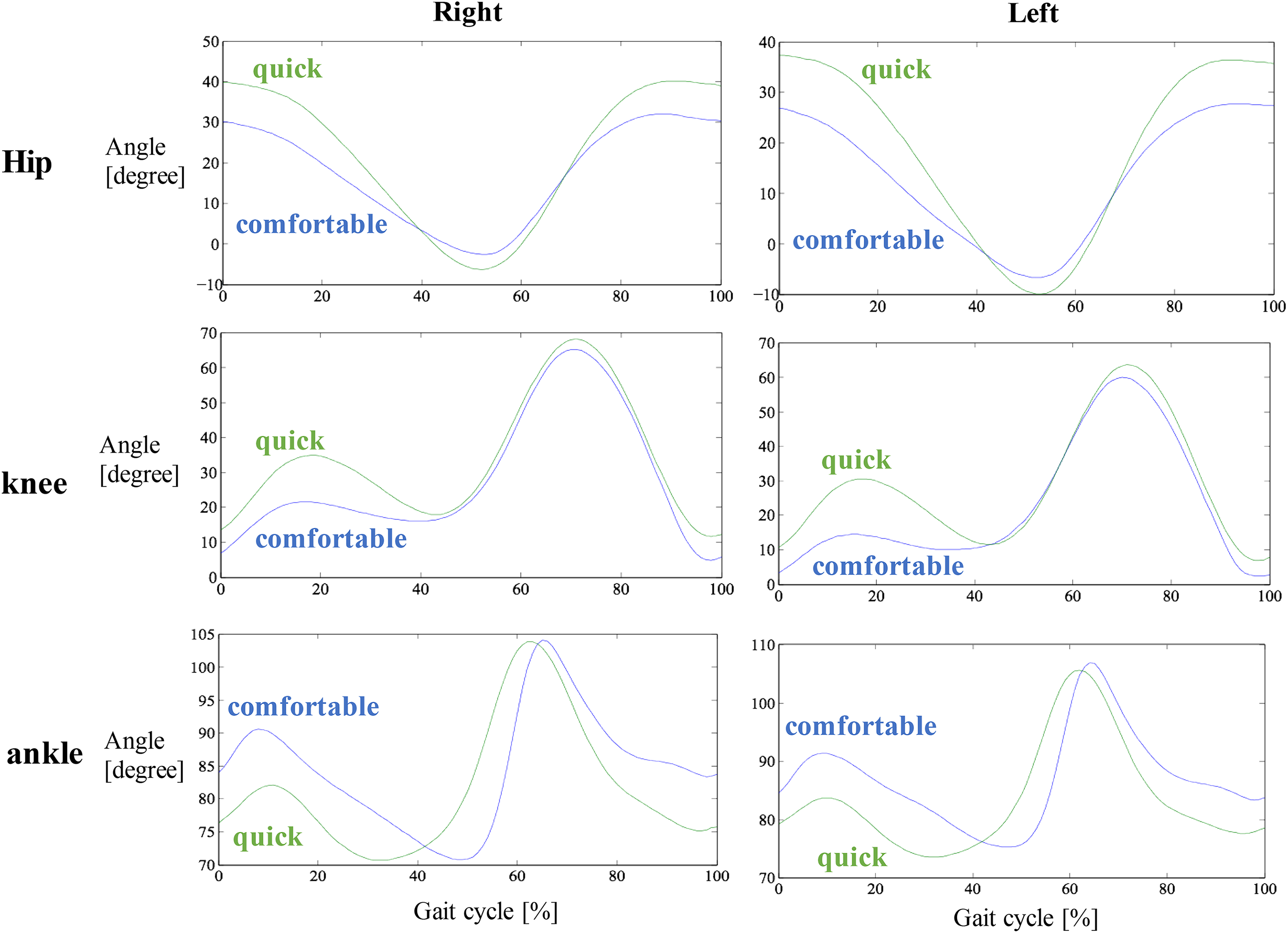
The mean of angular kinematics of hip joint (upper graphs), knee joint (middle graphs), and ankle joint (lower graphs) in the sagittal plane over a phase of a gait cycle (expressed from 0 to 100%) at each walking speed; quick (green) and comfortable pace (blue).
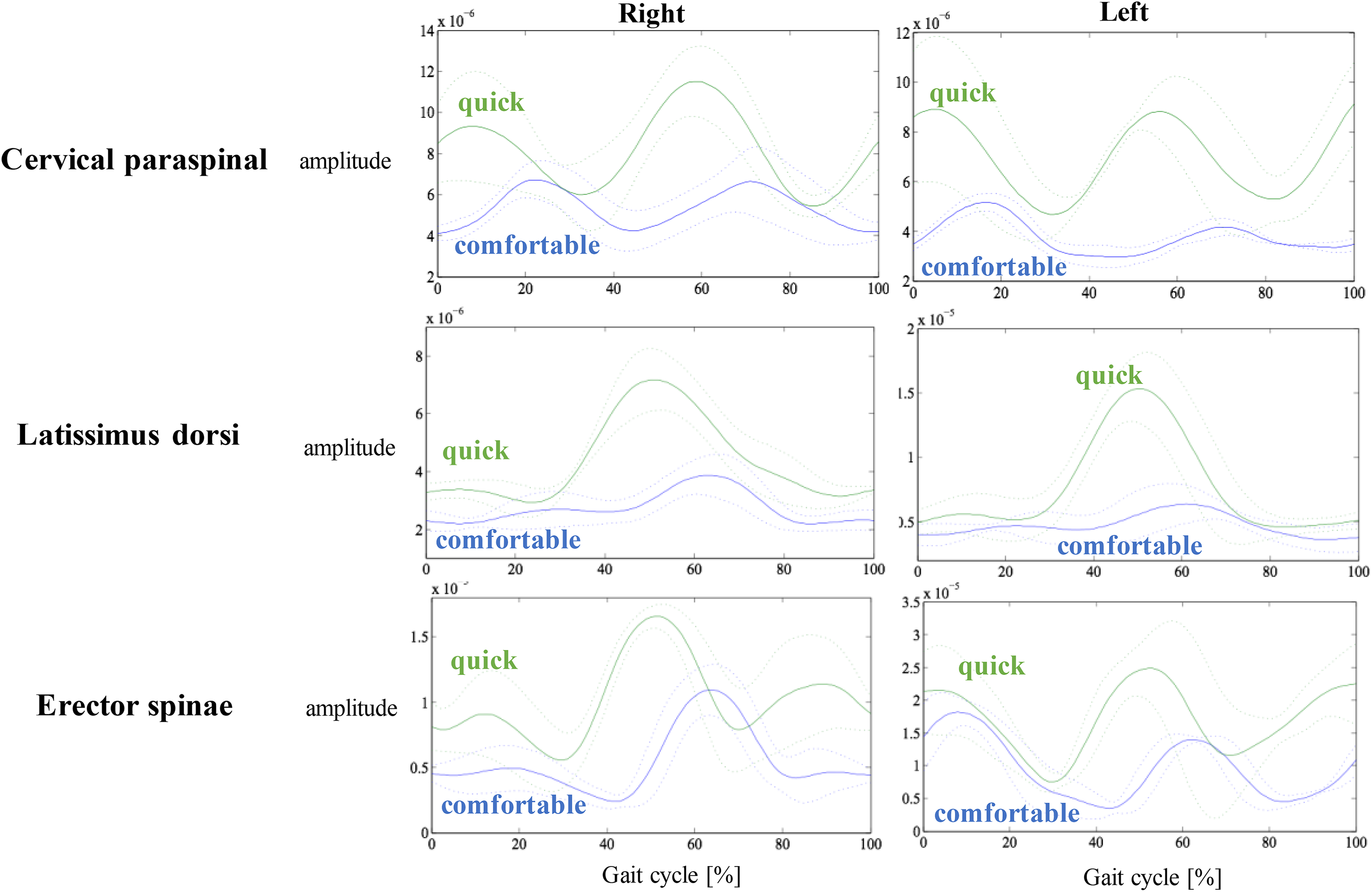
The mean of EMG variations of trunk muscles over a gait cycle at each walking speed; quick (green) and comfortable pace (blue).

The mean of EMG variations of lower limb muscles over a gait cycle at each walking speed; quick (green) and comfortable pace (blue).
Discussion
The present results show that joint angles of the lower limbs and EMG amplitudes of trunk and lower limbs increased significantly when walking at a quick pace compared with a comfortable pace in healthy individuals (Figures 5 and 6). From these findings, we consider that the period of maximum flexion of the ankle joint was longer, and EMG amplitude of the gastrocnemius increased at the heel-off period because quick pace walking involved strong foot takeoff. While walking at a quick pace, a large flexion angle of the knee joint was observed during the standing period. EMG amplitudes of quadriceps, femoral biceps, and tibialis anterior increased from the heel contact period to the loading response period because the trunk needs to be drawn to the forefoot located further forward than it is while walking at a comfortable pace.

Joint angular kinematics of the lower limbs while walking at a quick pace increased significantly compared with those while walking at a comfortable pace. Hip Flex, maximum flexion angle of the hip joint; Hip Ext, maximum extension angle of the hip joint; Knee Flex, maximum flexion angle of the knee joint while standing.
EMG amplitudes while walking at a quick pace increased significantly compared with those while walking at a comfortable pace.
Many approaches to the analysis of gait in healthy subjects have been investigated. These investigations have shown that high-speed walking increased EMG amplitudes of muscles in the trunk and lower limbs. 7 –12 The present data are consistent with previous findings, showing the feasibility of our newly developed system for the dynamic analysis of gait kinematics and the activity of trunk and lower limb muscles in healthy individuals. We developed our original method of analysis to measure 3D gait motion and surface EMG synchronously to evaluate dynamic change of kinematics and myoelectric activity accurately. By checking the graph of dynamic change of myoelectric activity in comparison with the graph of angular kinematics, it is easily visible to understand the myoelectric activity at each joint angle. For instance, EMG amplitudes of the trunk muscles increased at extension of hip joint, and EMG amplitudes of the quadriceps, femoral biceps, and tibialis anterior increased at flexion of hip joint. This new method has the advantage of analyzing dynamic muscular activity in the walking cycle more accurately than previous methods. By taking advantage of our method of analysis, we can observe increases in the joint angles of the lower limbs and EMG amplitudes of the muscles in the trunk and lower limbs while healthy individuals walk at a quick pace. Therefore, our 3D gait motion analysis is useful to determine conformity while walking. It is a subject of future study of our gait analysis for patients with various disorders and lower limb joints.
Conclusion
Our unique method of gait analysis developed to synchronize 3D motion, and wireless surface EMG analysis successfully detected walking speed variation-induced dynamic changes in lower limb joint angles and activity of trunk and lower limb muscles.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.