
Abstract
Liquid handling plays a pivotal role in life science laboratories. In experiments such as gene sequencing, protein crystallization, antibody testing, and drug screening, liquid biosamples frequently must be transferred between containers of varying sizes and/or dispensed onto substrates of varying types. The sample volumes are usually small, at the micro- or nanoliter level, and the number of transferred samples can be huge when investigating large-scope combinatorial conditions. Under these conditions, liquid handling by hand is tedious, time-consuming, and impractical. Consequently, there is a strong demand for automated liquid-handling methods such as sensor-integrated robotic systems. In this article, we survey the current state of the art in automatic liquid handling, including technologies developed by both industry and research institutions. We focus on methods for dealing with small volumes at high throughput and point out challenges for future advancements.
Introduction
In the past century, research in life science has helped scientists to discover the biological basis for life and to develop ways to overcome disease. In 2000, the genomics revolution arrived and ushered in a major expansion of research efforts on gene sequencing and protein-structure discovery.1-5 These efforts enable scientists to study the cause of disease at the molecular level and to practice structure-based drug development—efforts that have obvious implications for human health.
Liquid handling is an essential part of many experiments related to life science, most particularly for genomic and proteomic research. In such research, samples of protein or DNA solutions must be dispensed into microwells or onto substrates; subsequent synthesis and analysis steps often require dispensing of additional solutions. Examples of liquid handling in genomic and proteomic applications are listed in Table 1 .
Applications of Liquid Handling in Genomic and Proteomic Analysis
In modern life science laboratories, high-throughput liquid handling is frequently needed for the purpose of efficiency. For example, in the area of protein structure determination, the number of protein-coding genes in a species is huge, somewhere between 20 000 and 25 000. 6 Because specific conditions such as solution composition, temperature, and pH for optimum crystal growth cannot be predicted a priori, a large number of experiments must be performed to determine the appropriate conditions for protein crystal growth.7-12 Another example can be seen in drug development. Pharmaceutical companies and research institutions are engaged in a relentless pursuit of new drugs to combat diseases more effectively. In a single drug discovery experiment, a million compounds might be screened to identify a single new drug candidate. These experiments are often at the molecular level, and the bioactive assay samples can be fragile and expensive. Because of this, the sample volume dispensed needs to be precisely controlled and as small as possible. Microarray technology, which has been widely used in high-throughput experiments in the analysis of DNA sequence,1,13 to monitor the reactive activities of thousands of genes simultaneously,13-19 presents the typical requirements of liquid handling in life science: high accuracy and precision, high throughput, and low volume of samples. However, the activities are tedious, time-consuming, and even impossible if performed by hand. Consequently, automation for life science has become a very important field of study today.
In recent years, laboratory automation has attracted a great deal of attention, 20 and robotic technologies that have been in the field of factory automation for a long time are used for automatic liquid handling. Besides, new application-specific devices continuously emerge for the purpose. In this article, we report a survey result on the current state of the art in liquid handling and present technologies developed by both industry and research institutions. Unfortunately, the field of liquid handling in life science is too huge to cover with a single article for it involves a number of subfields, including liquid filling, dispensing, mixing, detecting, transferring containers in a laboratory environment, and so on. By far, dispensing is the major focus because it is the core of most experiments in life science. This review article therefore reports the state-of-the-art technologies for automatic liquid dispensing.
This article is organized as follows. In the second section, fundamental technologies for liquid dispensing are presented for the purpose of understanding the technical challenges of the field. In the third section, new development of automatic liquid dispensing is introduced from handheld tools to robotic workstations. In the fourth section, attention is given to the architecture of a liquid-handling robotic workstation. The main components of the robotic workstation, which integrate dispensing heads and actuators, substrates, robots, washing modules, and sensors together for a high degree of automation, are introduced in the fifth section. In the sixth section, a performance comparison of some commercial robotic workstations is made. And in seventh section, challenges for advancing the technologies in liquid handling are presented, followed by the conclusions of the article.
Fundamental Liquid-Dispensing Technologies
For liquid dispensing at the micro- or nanoliter level, surface adhesion is the dominant factor that affects the performance. Fundamentally, liquid-dispensing technologies have to overcome surface adhesion and dispense the droplet from the dispensing tool. Gravity is not sufficient for dropping viscous biosamples when the volume is small. A variety of methods have been developed to overcome the problem by generating additional driving forces to dispense the droplet. In general, those methods can be classified into two categories: contact and noncontact dispensing, respectively. Figure 1 shows the technology classification where noncontact dispensing is further divided into a number of branches according to how the driving force is generated for dispensing.
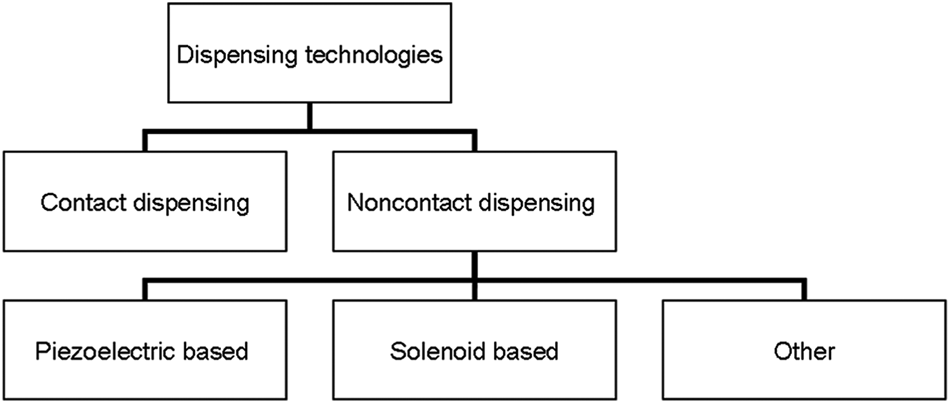
The classification of liquid-handling technologies.
Technologies for liquid dispensing in the high-throughput manner have been studied for well over a decade. In 2000, Dunn and Feygin 21 surveyed the then-technologies regarding dispensing methods and tools, including contact and noncontact dispensing, pins, syringes, and plates. For completion purposes, this article will still report these fundamental technologies in this and following sections with an emphasis on those developed since 2000.
Contact Dispensing
Contact dispensing means that a touch-off is necessary to complete the liquid dispensing. When the liquid attaches to a substrate, a drag-back action is done to overcome the surface tension between liquid and the dispensing tip, without which the liquid will not drop. Contact dispensing is most popular for dispensing samples of small volume from nano- to microliter because of its simplicity, reliability, and low cost. However, reliable dispensing requires an accurate positioning system. 22 Furthermore, special attention must be paid to hard contact, which may damage the dispenser tip by colliding with the container. In addition, it is necessary to wash or even replace the dispensing tips to avoid cross-contamination.
Noncontact Dispensing
Noncontact dispensing means liquid is ejected from an orifice instead of using a contact between the liquid and the surface container. It avoids some disadvantages of contact dispensing mentioned above. Of all the noncontact dispensing methods, the most common approaches are based on the inkjet printing technology, which further falls into three categories: solenoid, piezoelectric, and other.
Solenoid dispensing is a widely used approach. The liquid would be back pressed into the solenoid valve,23-25 and with the valve opening, the liquid is ejected. The performance of solenoid dispensing relies on the response speed of the valves.
A piezoelectric dispenser uses a piezoelectric crystal coupled to the glass tube (capillary) as a collar. 26 The collar would contract to cause pressure on the glass tube when the voltage signal is applied. Nanoliter liquid drops are then ejected. 26 The volume dispensed depends on a number of factors such as the diameter of the tube, the viscosity of the liquid, and the voltage pulse amplitude and frequency.
The most notable technology in the other category is acoustic dispensing, which uses focused acoustic energy to derive the liquid. The volume of the ejected droplet can be controlled by the intensity of acoustic energy without any physical contact.27,28 One equally or even better known technology in this category is thermal inkjet printing, which is a widely used mechanism in the inkjet printing industry. Researchers in life science use a commercially available thermal inkjet printer to print biosamples directly on substrates, and experimental results have shown that less than 8% of the samples are lysed during printing.29,30 However, this method can be used only in a limited number of applications because high temperature caused by the heat may shorten the life or alter the characteristics of the biosamples.
Gas drive is also a common traditional drive method.31,32 It is cost-effective to gain a large driving force in this way. But if the liquid is directly driven with compressed gas, it may cause microbubbles in the liquid. In addition, the compression characteristics of the gas will cause instability pressure, which may affect the consistency of dispensing results, especially in micro-even nanoliter volume dispensing works. These factors must be taken into consideration when building a pneumatic liquid-handling system.
Another interesting method of dispensing is by using electrostatic forces, introduced in recent years.33,34 The electrostatic force is generated by the potential application between the pipette tip and destination plate, which draws the sample to the plate.33,34 In recent years, researchers have developed unconventional methods for driving the liquid for noncontact dispensing, including superparamagnetic beads, 35 surface tension of the liquid, 36 light, 37 and a spatial light modulator for processing a large array of droplets. 38
Development of New Automatic Liquid-Handling Technologies
Handheld liquid-dispensing methods and devices have been widely used in life science experiments for many years. Syringe or pipette is the prime tool in this field. In recent years, however, the use of robotic workstations for liquid handling has increased significantly to meet the need for high accuracy and high throughput.
A syringe is a common tool for liquid handling. The core of a syringe is a tube and a plunger that fits tightly in the tube. The plunger can be pulled or pushed to act as a pump for taking in or expelling the sample through the orifice at the end of the tube. Sometimes, a thin needle serves as the tube and its open end as the orifice. As low-volume dispensing becomes increasingly common in life science, microsyringes have emerged ( Fig. 2a ), which have a high level of precision with hermetic seals.39,41 Some manual or electronic holders are designed to precisely control the piston displacement to ensure the accuracy of the dispensed volume.42,43
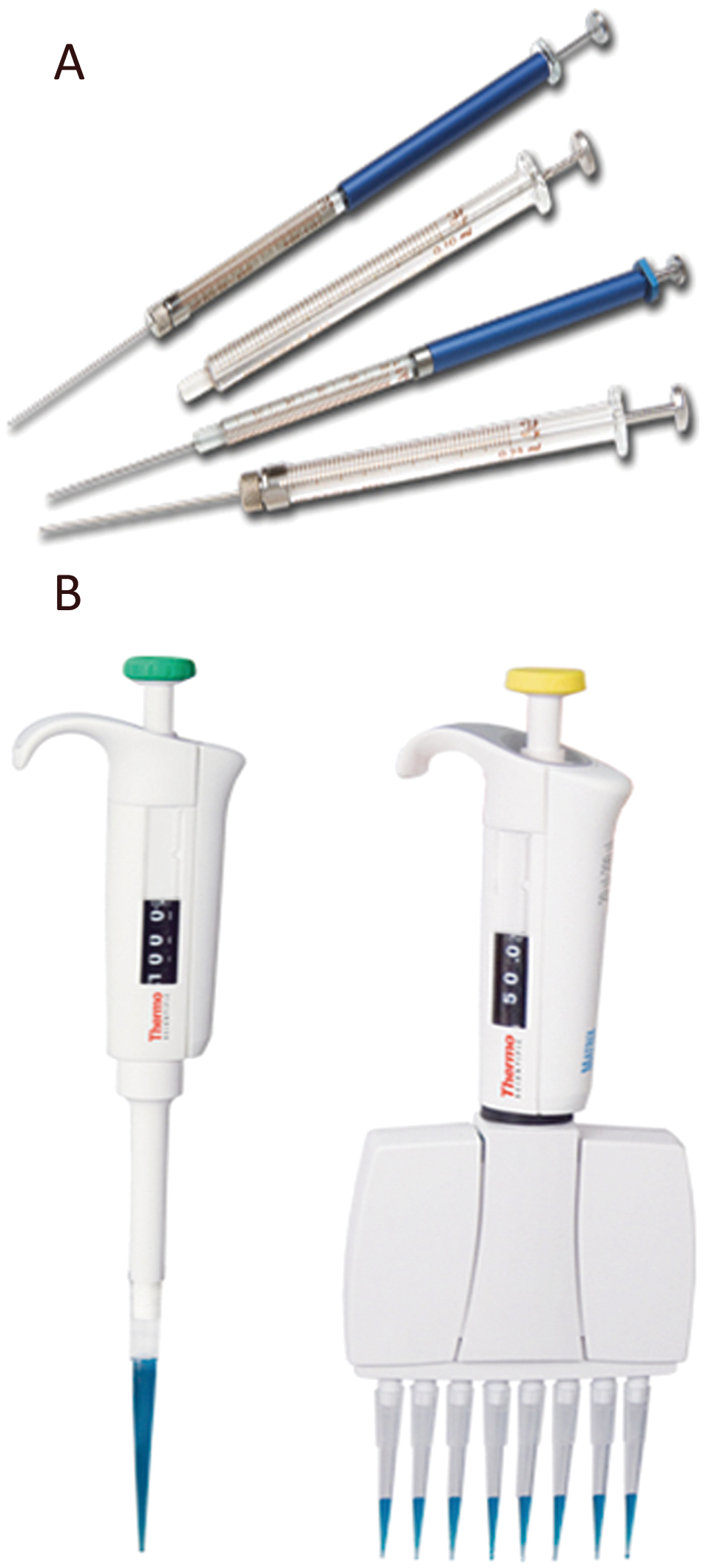
Besides the syringe, a pipette is another popular tool for liquid handling. It works by creating a partial vacuum above the liquid-holding tip and adjusting the vacuum to pull up and dispense liquid. The dispensed volume can be at the micro- or sub-microliter level. There are hundreds of different pipettes on the market. Multichannel pipettes were recommended for multirouting pipetting at one time ( Fig. 2b ). The design of adjustable tip spacing, as provided by Matrix Technologies Corporation (Hudson, NH), allows the transferring of multiple samples between different tube rack and microplate configurations. 44 There are both fixed- and adjustable-volume pipettes on the market. The former is more accurate and precise, whereas the latter has a larger scope of applications because the operator can choose different volumes according to the needs of the experiments.
In general, it is feasible for handheld tools to predetermine and control the dispensed volume. However, accuracy may deteriorate due to the wearing or failure of individual parts or human errors since even the most experienced users can make mistakes. The electronic pipettes are considered more accurate because they are more independent of user experience and can achieve self-calibration with optical feedbacks. After all, the users may still obtain incorrect volumes when thousands of trials need to be performed daily. Besides, high throughput has become critically important in life science research. One of the representative applications is microarray printing. This technology creates an array of biosample spots each at the nanoliter scale to enable the analysis of large numbers of experiments in parallel with only tiny quantities of samples. The process of spotting thousands of biosamples is almost an impossible task with a handheld dispensing tool, and robotic liquid handling has become more important than ever before.
Robotic workstations have advantages over manual liquid handling since robots can work without fatigue, increase the throughput, perform consistently, and ensure accuracy and precision. There is such a huge difference in the scale and scope of automation for robotic liquid dispensing. For some, the focus is on single-tasking of dispensing samples into plates, leaving the rest to human hands. This type is usually at a bench scale, with a different positioning system, dispensing liquid in a single- or multichannel mode. One example is the Wellmate dispenser of the Matrix Technologies Corporation, which can be programmed to dispense volumes from 1 to 2000 µL. 45 A washing station or detection sometimes may be included to ensure the dispensing accuracy. For others, the purpose is multitasking for a higher degree of automation. For a complete dispensing process, it may include sample transfer, substrate preparing, liquid dispense, experiment result store and detection, and so on. The multitask type is often the integration of a single-tasking workstation with expending accessories, including liquid handlers, plate washers, plate readers, plate sealers, and other devices that can constitute a versatile automation platform for liquid handling. According to the requirements for the platform with integration and multifunction, there are still more complex systems in which the liquid-handling task is only one part of the function. Figure 3 shows three products from the Hudson Control Group Laboratory (Springfield, NJ) with different levels of automation.
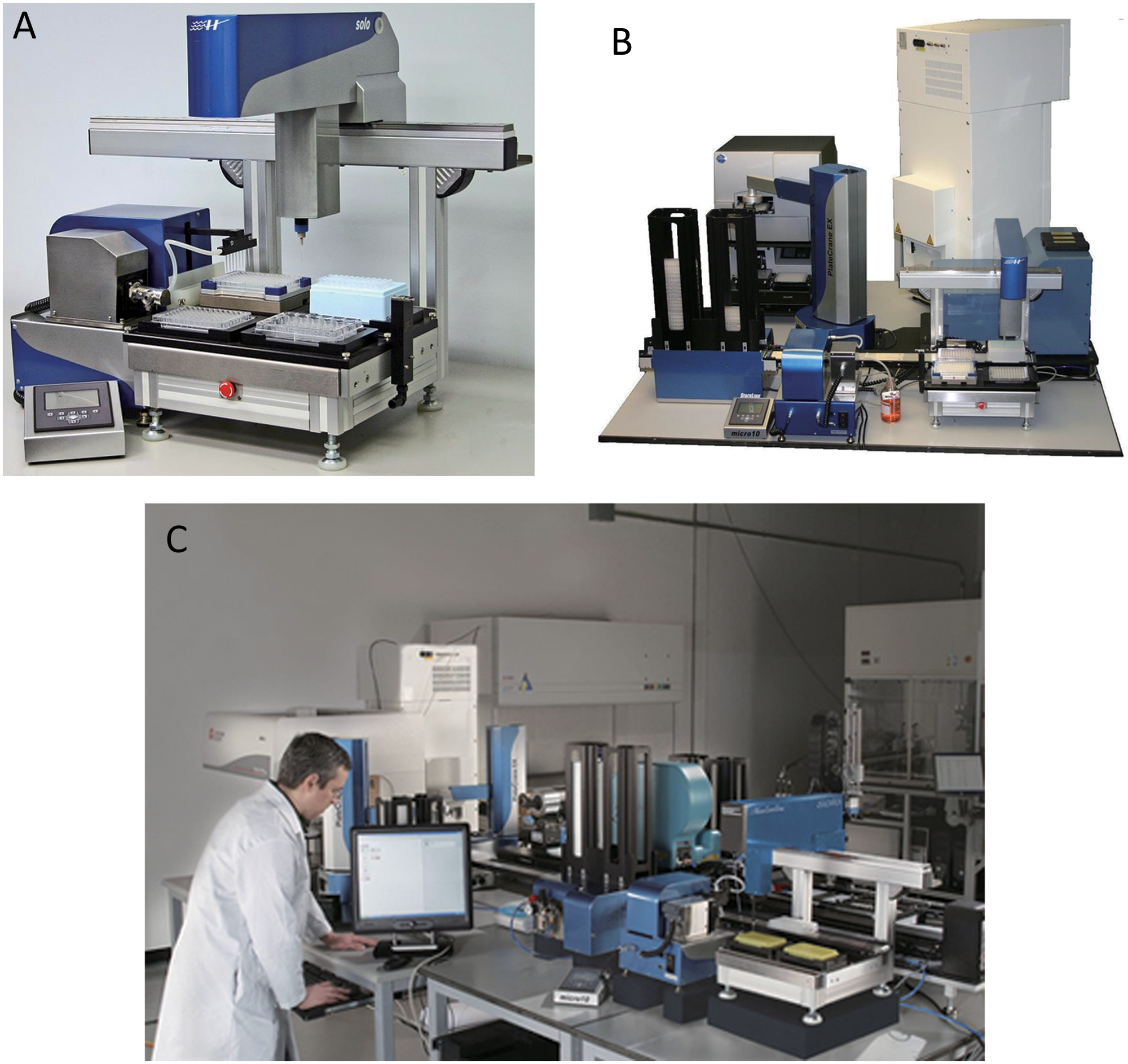
The SOLO plus combines Hudson SOLO, which is a high-throughput single-channel pipette, with the Micro10x Robotic Benchtop multichannel dispenser. Users can accurately transfer individual compounds of small quantity and then quickly add common reagents and solvents.46,47 The VaryScreen I integrates the dispensing module, the PlateCrane EX microplate robot, and the microplate reader with fluorescence, luminescence, and UV-visible detectors to carry out high-throughput multiassay screening tasks. 48 The ProLink Express also is a fully automated proteomics work cell. It integrates all the components needed for DNA expression of gene libraries and automates the entire process. 49
System Architecture for Liquid-Handling Robotic Workstations
The generic architecture of liquid-handling robotic workstations can be seen in Figure 4 . First, the control center controls a robot that moves between the dispensing part and the washing station of the robotic workstation. The washing station is used to clean the dispensing head for lengthening its life and for ensuring the safety of the sample. Liquid samples are expelled from the dispensing head and deposited on the substrates for further processing. Sensors are incorporated to monitor the status of the dispensing part such that feedback control can be performed by the control center. Sensors are not always installed on all the workstations but are more and more used to construct the feedback loop for delivering a better performance.
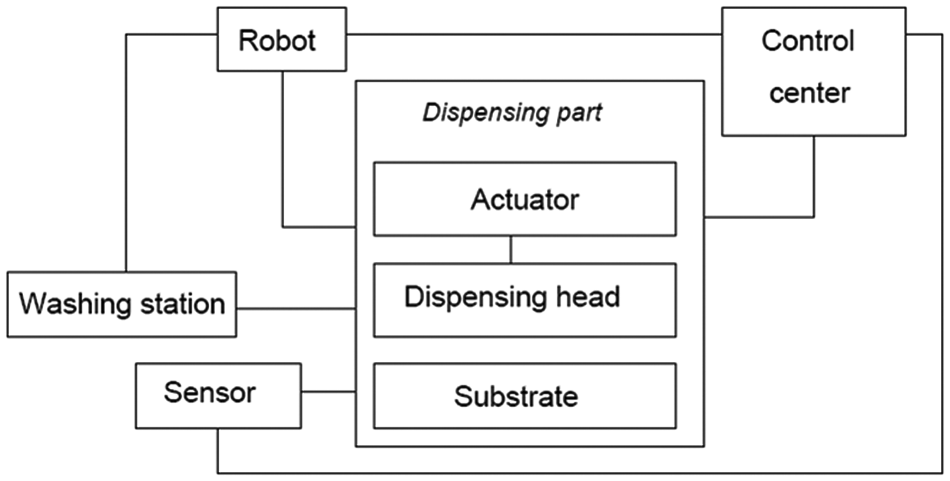
Generic system architecture of liquid-handling robotic workstations.
Figure 5 shows an integrated robotic workstation by The Ohio State University (OSU), 50 where all the components involved are also shown. The robotic workstation is designed for handling solutions even with high viscosities. It is built upon a commercially available liquid-handling robotic system (Xantus, Sias AG, Hombrechtikon, Switzerland). The robot has two arms. Arm 1 is used to hold pipettes for aspirating and dispensing microliter volumes of precipitant solutions, whereas arm 2 is equipped with a microprocessor-controlled microsyringe pump to hold a dispensing syringe. A standard Hamilton gas-tight 100-µL syringe is used to deliver nanoliter volumes of highly viscous mesophase. Researchers at OSU have also designed the cubic-phase-based coordinates measuring machine (CMM) to detect the position of the head of the dispensing syringe in real time. More details of this workstation will be introduced in the next section.
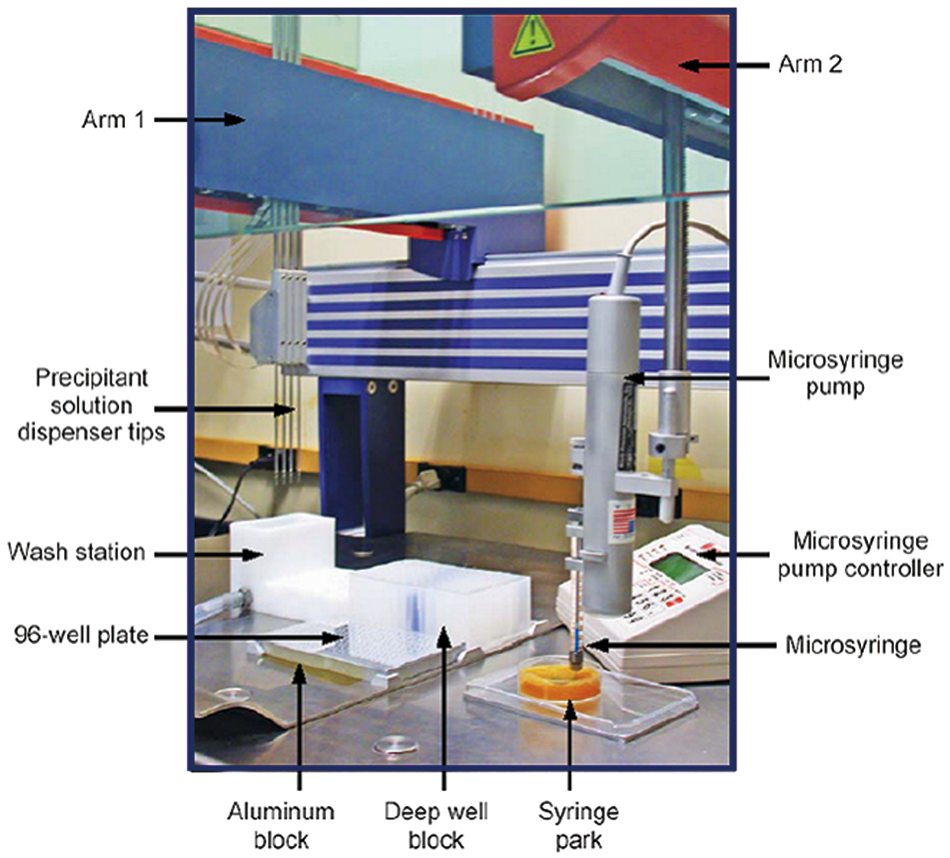
The Ohio State University liquid-dispensing robotic workstation. 50
Components of Liquid-Handling Robotic Workstations
Without well-designed components integrated into a workstation, it is not possible to reach the ultimate goal of automation. Those components include dispensing parts, robots, washing modules, and sensors, and the dispensing parts are composed of dispensing heads, actuators, and substrates.
Dispensing Parts
Dispensing heads
The dispensing head is a general term for devices that dispense solutions to a mechanical receiver, to a spot on a substrate, or into a container such as a microwell. It plays a decisive role in determining the quality of the dispensed spot or the accuracy of the volume dispensed. The material of the head should be chemically compatible to the sample (i.e., no chemical reaction takes place between the two). Cleaning and cost issues must also be taken into consideration. To satisfy all the above constraints, steel and virgin polypropylene are often used to ensure excellent clarity and smooth surface, easy cleanup, and no chemical reaction. Composite coating is often used for corrosion resistance and low friction. The most popular dispensing heads commercially available include pins, tips, and needles.
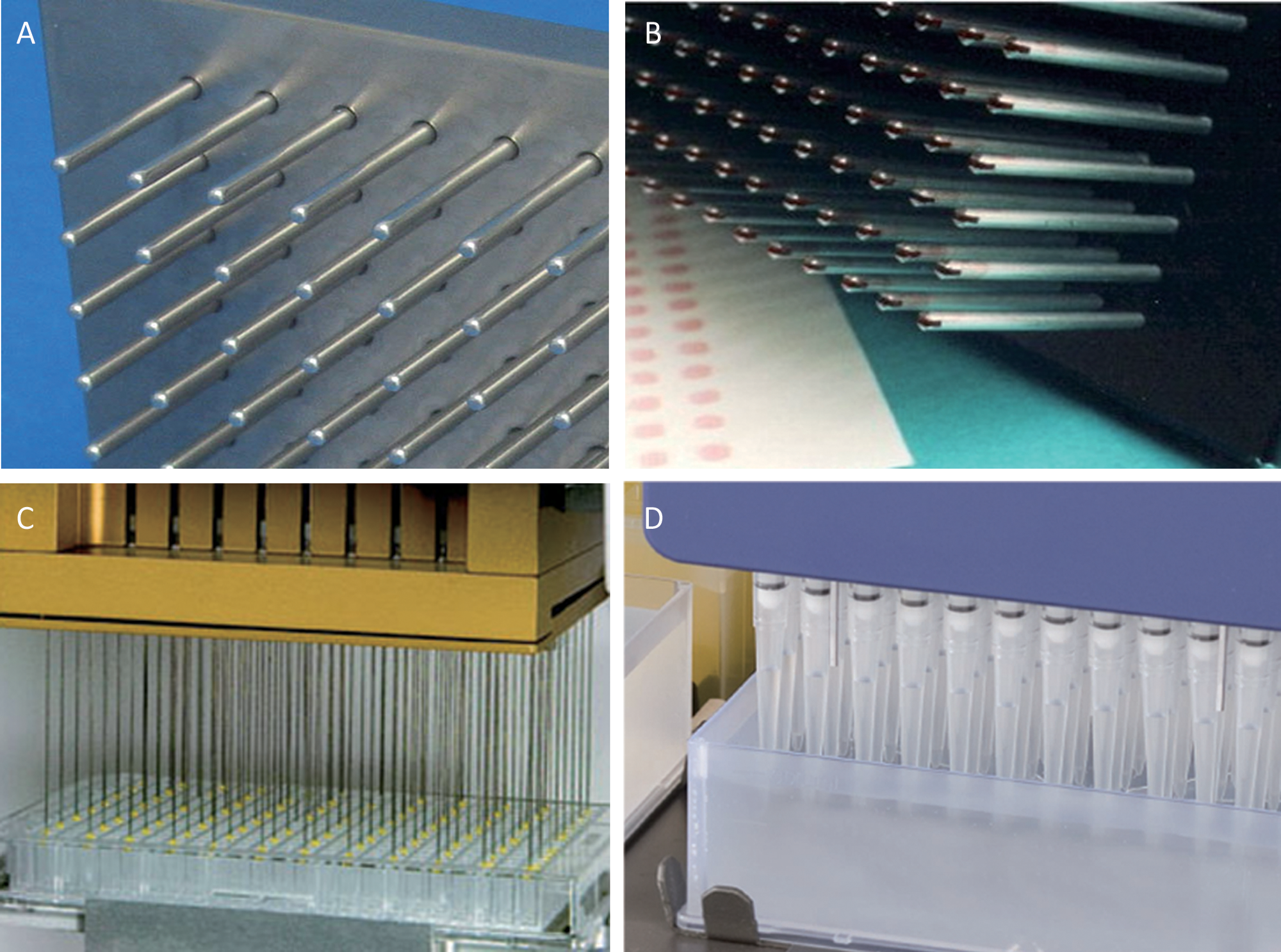
For hard contact dispensing (i.e., physical contact has to be made between the dispensing head and the receiver), one has to use a pin to tap the surface and deliver the sample. A number of types are in use, including the solid pin, split pin, capillary pin, and ring pin. The first two are more common, as shown in Figure 6 . Using the solid pin, the sample would be adhesive to the tip when it is submerged into the container and then be transferred to the substrate surface for dispensing, whereas the split pin can hold the sample inside the channel. The spot size dispensed can be determined by a number of factors, such as the dimension and the shape of the pin, the material and surface treatment of the pin, and the surface tension of the delivered liquid. The dwell time of the pin on the surface has an effect on the spot size as well: The longer a pin touches the surface, the more the sample is delivered. Besides, samples with different viscosity will vary the size of the spot under the same conditions. Pin tools can transfer smaller liquid drops than syringes or pipettes, but they may cause damage during the dispensing since the method is based on hard contact. V&P Scientific (San Diego, CA) has developed a floating pin technology. Instead of fixed on a certain base, each floating pin in a set has a degree of freedom to float up and down. This design ensures complete contact of all the pins to the substrate surface at once by the robotic system, avoiding the risk of damage at the same time, which makes the dispensing process more reliable and effective. 55
There are two kinds available—fixed tip and disposable tip. Fixed tips usually have smaller diameters, allowing lower volumes to be pipetted, but tip washing is troublesome and time-consuming. The primary motivation for using fixed tips is to contain the cost. When working with sticky samples that are difficult to wash, such as blood, the disposable ones are a better choice. Some companies such as Matrix Technologies Corporation provide filter tips to reduce the risk of cross-contamination. 56 The structure of the tip is uniform with different sizes, with a large range for needles. Both the diameter and the orifice shape of the needle influence the volume of the ejected droplet. Some numerical simulation and real experiments have been studied to obtain the relationship between the dispensed volume and those two factors.56-59
There is a difference in the use of pins, needles, and tips. The pin has to refill before each dispensing, but the needle and tip can both hold a relatively large volume of sample with one filling and dispense a small amount each time. Refilling takes place only when the sample is all dispensed.
In recent years, the design of the dispensing head has become a hot topic in the field because of its importance in dispensing quality and efficiency. One example is the StarJet dispenser, 60 named because of its star-shaped nozzle geometry, which can minimize the friction between the liquid and the wall of the nozzle. A four-directional ejector also has been introduced. 61 The key feature of this device is that it is nozzleless, which means it can eject droplets in any direction and without any risk of nozzle clog. Many kinds of products have been introduced through the development of microelectromechanical systems (MEMS) technology, which offers the advantage of miniaturization, flexibility in shape and structure design, cost reduction with batch production, and facilitation for integration.62,63 One example is the dispensing well plate (DWP), which is equipped with an array of nozzles, each being connected to a sample reservoir by independent channels. When adding pressure to the upper surface of the DWP, a fixed volume of liquid is ejected, whereas the refill process is accomplished by capillary force when the pressure disappears.64,65
Actuators
In commercial liquid-handling workstations, syringe and peristaltic pumps are the most popular choice to achieve liquid flow. The peristaltic pump has a rotating head, which includes several rollers. When the rollers move along the tube, liquid flowing inside the tube can be achieved. This mechanism can create a continuous flow without contacting the liquid inside the tube, and the cost is relatively lower. However, since the flow is not always uniform, reliability of the pump is a challenge when dealing with low volumes. It is therefore more suitable for bulk liquid transfer. Syringe pumps provide more accurate handling in comparison with the peristaltic pump. Reversing the direction of the plunger movement, one can achieve either liquid aspirating or dispensing. In recent years, MEMS technology has become a popular choice for the design of various micropumps,66-69 which mainly include piezoelectric, electromagnetic, and shape memory alloy actuated approaches. These micropumps are developed according to the principles of the microfluidic system and can be integrated with the dispensing head to minimize the size of the unit.
Substrates
A substrate is an important device in liquid handling since it ultimately provides a place for liquids to react and for scientists to observe the results. The substrates fall into three categories: well plate, solid slide, and membrane.
A well plate is well commercialized and standardized in the current market. Most well plates on the market today have 96 or 384 wells. Most well plates come with 384 wells, as shown in Figure 7 . 70 In recent years, the key improvement in laboratory automation has been in miniaturization (i.e., driving down the size of the wells such that the number of wells on a single plate increases from 384 to 1536 or even higher). With the increased number of wells, the plates tend to become very sensitive to airborne dust, minute air bubbles, and evaporation. 71 Adding a plate centrifugation step or using sonic disruption can eliminate the bubbles. Recently, Aurora Biotechnologies (Carlsbad, CA) introduced a 1536-well microplate with 164 dummy wells as well as a 3456-well microplate with 244 dummy wells. 72 The dummy wells, filled with working liquid, are used to protect the sample wells by reducing the edge effects caused by evaporation or water uptake. 72
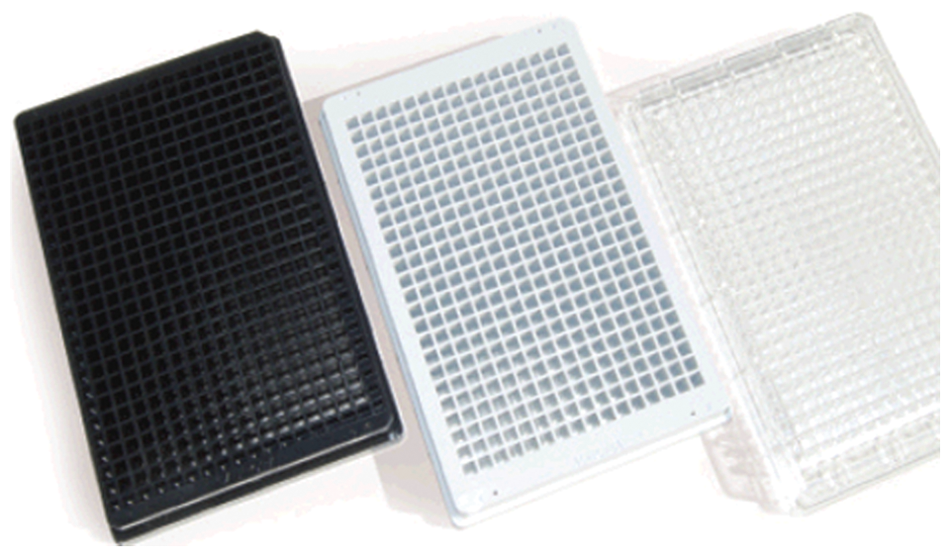
The mainstream 384-well plate. 70
A well plate can hold volumes from 1 sub-microliter to hundreds of microliters. It works as both a substrate and a sample reservoir for further dispensing. For example, in the microarray printing process, thousands of biosamples are pipetted first from bulk storage into the well plate array. Nano- and even picoliter spots are then printed on a chip substrate. This makes the printing process more efficient. The commercial plates now are always made of cyclo-olefin copolymer or polypropylene for high optical transmittance for low fluorescence and broad chemical resistance.
Solid slides and membranes usually work as the biochip substrate, such as the microarray, which contains samples with densities of 100 to 10 000 features/cm2. Glass and silicon slides are two common slides used in laboratory. Since optical methods are often used in laboratories to monitor experimental results in the wells and in a high-throughput fashion,73,74 demand for low-cost glass with excellent optical properties is always there. Microscope slides and plate cover slips with a perforated polymer spacer or silicone rubber sheet can all be made of flat glass to combine the advantages of the convenience for sample preparing in parallel and the detection of sample reactions through optical sensors.50,75
Microporous membranes are widely used for general filtration in the laboratories. Membrane filters work to trap or retain microparticles by selecting different filtration gap sizes. Combined with affinity purification, it has been used for high throughput of protein purifications since the 1990s. 76 Nitrocellulose, cellulose ester, Teflon, hydrophobic material, nylon, and polycarbonate are typical materials used to make membranes. For inkjet dispensing, the high-density glass substrate is not suitable, and membrane substrate always plays a role in these cases.
Robots
The most important component of a robotic workstation is the robot manipulator. The basic structure of robots designed for single-tasking of liquid dispensing usually includes x-y drives, plus sometimes a z drive, to control the translational motion of the end-effector, which holds the liquid-dispensing devices in the Cartesian coordinates. A liquid-handling robot usually has a gantry structure for its rigidity and stability. For smaller workstations, however, a cantilever structure can be used as a substitute to save cost. The positioning precision (repeatability) of the robot is usually up to 10 to 100 microns. According to the movement of substrate, dispensing robots can be divided into two modes: moveable substrate or fixed substrate. A fixed-substrate structure is simple, space savable with good stiffness, and most widely employed. In addition to dispensing positioning, a movable substrate structure can facilitate the automated substrate replacement process for high throughput; however, it requires a large movement space. The microplate positioning method in the workstations of Matrix Technologies Corporation enables active positioning of all the plates as well as precise placing of dispensing devices. 77 There are still some robots with more degrees of freedom to extend the volume of the workspace. For example, Protedyne (Windsor, CT) has introduced a specially designed robot for its biocube system that has an extra-angular drive to increase the flexibility of the motion. 78
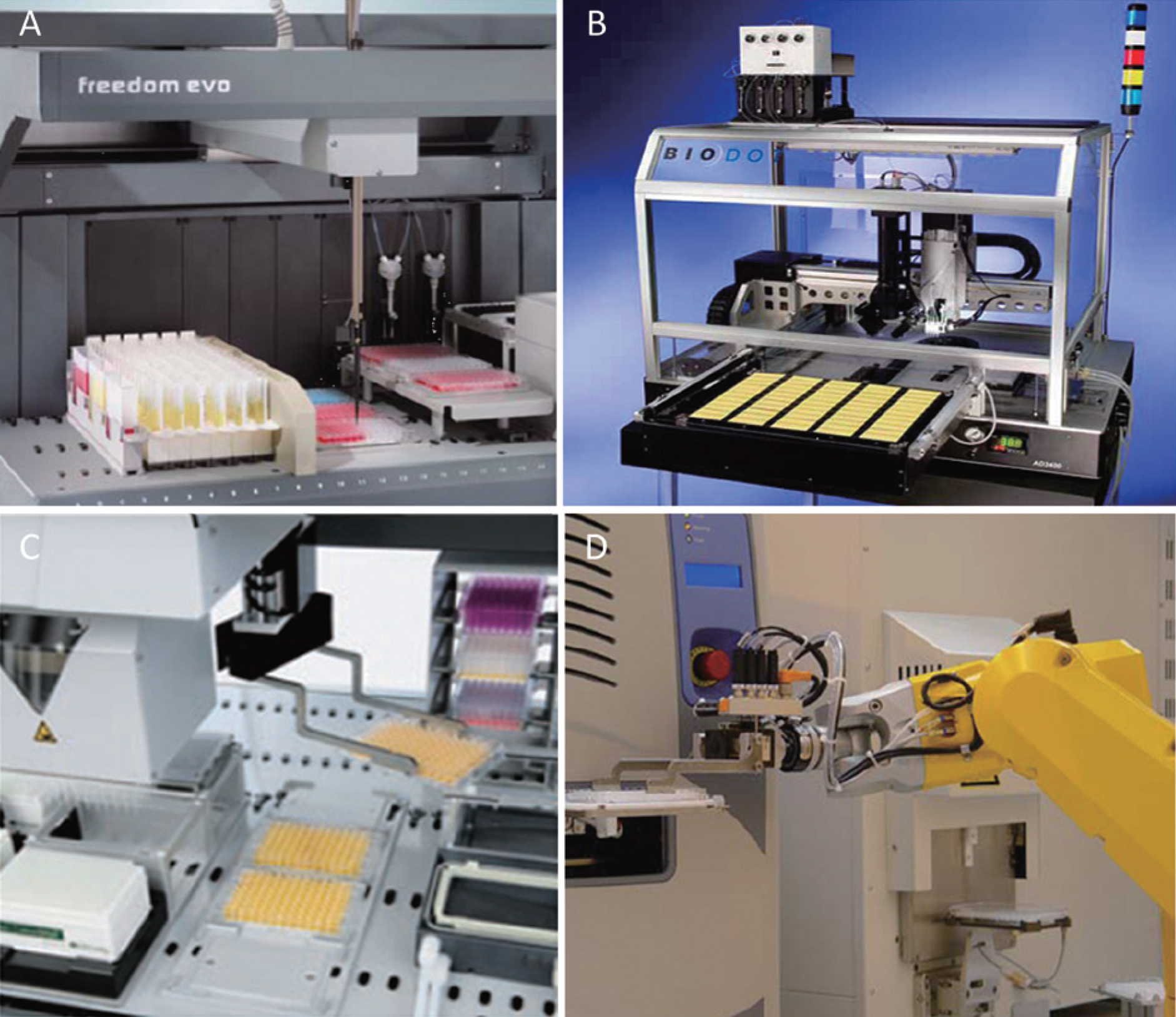
For even higher degrees of automation, robots are integrated for more purposes such as moving and changing plates, adding covers to the plates, transferring bulk liquid between workstations, and so on. In these cases, robots with more degrees of freedom are needed. The convenient choice is to use matured industrial robots. Beckman Coulter (Brea, CA) integrates Motoman industrial robots with its own automated liquid-handling system to provide the option of ultra-high throughput. 79 RTS Life Science (Irlam, Manchester, UK) has built an integrated sample storage and liquid-handling system, including the Echo 550 and 555 liquid handlers, and a six-axis articulated robot along with an intelligent plategripper is available for integration into the basic RTS platforms for a range of options. 80 Some typical commercial robots for life science liquid handling can be seen in Figure 8 .
Washing Modules
When using liquid-handling tools, cleaning up after each use is necessary to avoid cross-contamination. For well plates, the microplate washer has been available on the market, which can complete the cleanup work by pumps clearing water or detergent through manifold tubes to each well and aspirating the waste away. The tube number may be from several to more than 10, such as the HydroFlex 3-in-1 microplate washer of Tecan Group Ltd (Männedorf, Switzerland). 84 BioTek Instruments (Winooski, VT) has designed microplate washers for stand-alone operation or integration into robotic systems. 85
For cleaning the dispensing head or the whole capillaries, the cleaning module may be built separately but, more often, as a part of the dispensing process. In the first method, the dispensing head or the whole capillaries are cleaned at a special station. In the second method, a circular of liquid handling can be made, which results in highly automatic work. Ultrasonic is the usual way of cleaning in the laboratory. It can completely remove contamination adhering on the surface of experimental tools. However, extra devices are needed on the workstation to get ultrasonic cleaning. There is an easier method for liquid-dispensing workstations: Washing solution can be dispensed just as a sample solution. When it passes through the dispensing tools enough times, cleaning is completed. It is believed that the volume of the water used for cleaning should be approximately 100 times that of the sample volume. 86 However, for those systems using disposable dispensing heads or noncontact dispensing methods, cleaning is not an issue.
Sensors
A feedback loop in a workstation can achieve substantial improvement in dispensing accuracy and precision. Currently, sensors and related technologies are the main methods to achieve this requirement. For a liquid-dispensing workstation, they are essential to ensure minimal tip contact with liquid or no contact at all, detect clogging and air bubbles, or monitor the liquid flow and dispensed droplet. In general, a sensor is becoming a necessary component for accurate and precise liquid handling in automated robotic workstations.
A successful sensor method for liquid handling should have the following attributes: speed, repeatability, robustness, and low cost. 87 The first sensor is of the contact type by which most liquid handlers use a capacitance or resistance sensor. When contact between the tip and the liquid is made, the capacitance or resistance is changed, which can be used in the feedback control of the motion of the tip. Using the liquid cubic phase as the transducer also has been introduced. 7 It is based on the fact that the cubic phase contains almost 50% water and hence conducts electricity, although its resistance is high. The method expels a small bolus of the cubic phase at the needle tip. When this bolus makes contact with a metal clamp, which is used to fix the glass slide at the XY translation stage, an intermediate value of the resistance can be read. If the resistance drops from a high value to this intermediate value, a signal can be sent, which indicates contact.
Force sensor is another method. Researchers at Arizona State University have investigated the structure of a micropump for microliter liquid dispensing. In the design, a pressure sensor is installed in the reagent reservoir, which is used to control the flow rate of the dispensing liquid from the reservoir. 88 Another example is the device built by the researchers at Laboratoire d’Analyse et d’Architecture des Systemes and Laboratory for Integrated Micro-Mechatronic Systems of Centre National de la Recherche Scientifique,which is a contact dispensing system. Closed-loop position monitoring is integrated via force-sensing cantilevers to control the trim of the array, the contact time, and the contact force during the liquid deposition to create uniform picoliter droplets. 89 A flow sensor introduced at the Harbin Institute of Technology is based on two piezo-resistive pressure sensors integrated on the system fluid path to obtain the pressure difference across a flow channel, which can help the system to self-adjust the open time of a solenoid valve according to different viscosities of the solution.90,91
Capacitance sensors sometime also work as a contactless sensor.92,93 In these cases, liquid usually passes through an electric field of a capacitor without any contact and causes a change in the capacitance. The sensor information then can help achieve closed-loop control of liquid dispensing. For the contactless method, however, researchers more often use optical measuring. Absorbance and fluorescence are the most common methods to precisely verify the dispensed volume. Chang et al. 94 designed different optical measuring for their Liquid Dispensing Pin system. In the system, the optical fiber probe, with which the fluid delivery plunger is made, works as an optical lever to detect the distance between the fiber tip and the slide plate. A sudden reduction of the sensor signal indicates contact of the liquid with the slide. 94
There is also a trend to integrate different kinds of sensors for achieving robust and precise dispensing.95-100 A new micropipetting device for pipetting biological liquids has been introduced. 101 In the device, the pipette head includes two membranes. One works as a position sensor to measure the displaced volume, and the other works as a differential pressure sensor to measure the internal and external pressures. With these sensors installed, the pipetting process can be monitored and malfunction detected.
Performance Comparison of Commercial Robotic Workstations
Some laboratories have designed new dispensing tools or components,102-107 whereas others have built their own workstations.50,108-110 Still, most laboratories prefer commercially available ones since there are many components or integrated workstations for various purposes and at a reasonable cost.
For example, for contact dispensing, the BioDot, Inc. (Irvine, CA) has AD serious systems equipped with silicon pins that can work for high-throughput biochip manufacturing. When combined with their BioJet Puls, these systems can be actuated by syringe pump and dispense in the noncontact mode. 111 The Scienion (Berlin, Germany) sciFLEXARRAYER dispenser uses the piezo-based noncontact dispensing method to eject droplets in picoliters, which is suitable for the production of DNA and protein microarrays. 112 The Echo 555 liquid handler also employs acoustic droplet ejection technology for touchless transfer to perform direct microplate-to-microplate transfers of droplets for as small as 2.5 nL with the function of measuring the water content in DMSO as well as the volume of the fluid in the well. 113
According to the trend of versatility in this field, more and more products can deal with different numbers of well plates or dispensing tips. Tecan Group’s Multichannel Arm 384 works with disposable tips and washable stainless tips. 114 Hudson’s Micro10x automatically adjusts to the height and well-pattern of any standard microplate. 115 At the same time, the expansion and integration function of these commercial products for high-level automation become more and more important. An example is Sias’s Erobot system, which is based on the company’s Xantus platform to automate sample preparation, liquid handling, and plate washing and reading with an optional plate incubator. 116
Some critical factors determine the performance of all kinds of liquid-handling workstations. The first two important factors are precision and accuracy. Precision means repeatableolume dispensed without reduction of accuracy, whereas accuracy is the agreement between the selected and actual volumes.
Devices and workstations for liquid handling always need to be calibrated periodically to ensure their precision and accuracy with some accepted standards, such as DIN12560 or ISO8655. Gravimetric, spectrophotometric, and radioisotopic methods are the common calibration methods. The gravimetric method is for volumes in the microliter level since the analytical balance today can reach a resolution of up to 0.1 µg or better. 117 When the sample volume handled is down to nanoliter scale or weighs only a fraction of µg, the resolution of gravimetric methods is not enough, and spectrophotometric or radioisotopic methods become better choices. In the latter two, dye or fluorescence is added to the samples, and optical or radiated signals from different spots of samples can be compared to validate the result.
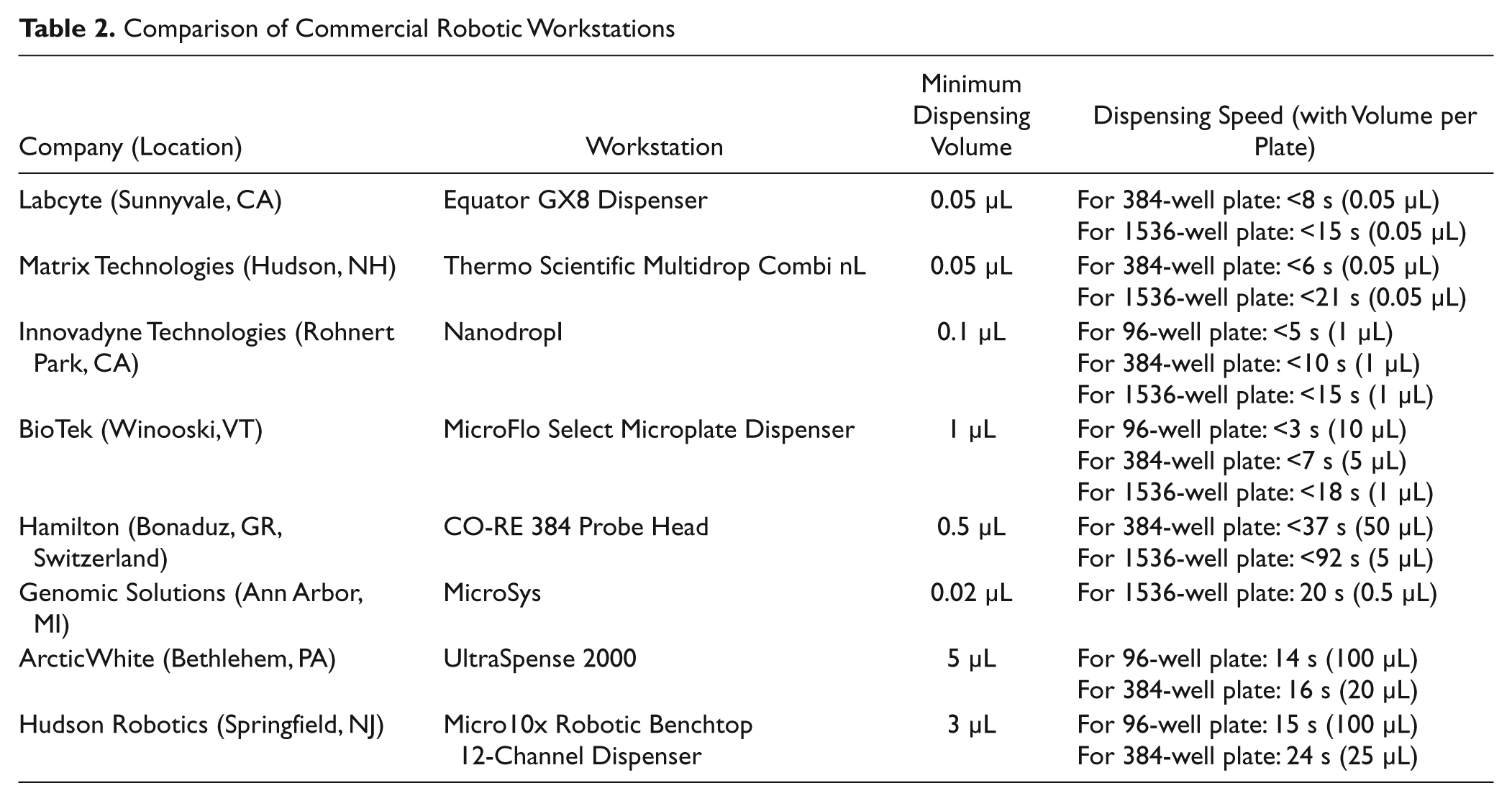
After all, minimal volume and level of throughput are two essential measurements of the performance of a system for liquid handling. A number of commercial robotic workstations for liquid handling are listed in Table 2 for performance comparison in terms of dispensing volume and speed.
Comparison of Commercial Robotic Workstations
Challenges in Automatic Liquid Handling
New technologies and products have been continuously emerging for liquid handling in life science. However, obstacles, which pose significant challenges to the researchers in the field, still exist. The primary challenge, of course, is always to achieve reliable, robust, repetitive, and high-speed operation, which can be approached in many directions. According to our investigation, the following issues are interests of research in recent years: evaporation control, viscous material handling, evaluation and calibration, clogging detection and air bubbles dissolution, and system integration.
Evaporation Control
When large volumes are being handled, evaporation may not be an issue. At the nanoliter scale, it becomes a serious problem. A simple method is to include an additional pool of water or have solutions to prevent the evaporation. The microplate of Aurora Biotechnologies (Carlsbad, CA) we introduced in the previous section is designed with extra dummy wells to hold working liquid in this way. 72 This method is widely used in laboratories to prevent the edge effect of microplates, which is often caused by evaporation in the outer wells of the plate. However, this is a relatively crude way without precise control. The current solution for this problem is to add highly sensitive sensors or a module within an automatic dispensing system to detect the conditions of environments. The recommended values of the condition parameter may be determined according to empirical results. Humidity-controlled chambers or rooms that maintain precise relative humidity and temperature can reduce evaporation. The method has been used by the OSU dispensing robotic workstation. 50
Researchers have also attempted more methods to further prevent the negative impact of evaporation. For example, the evaporation condition can be preestimated before the experiments are performed such that an extra volume of water can be added. This is helpful but not always effective since the degree of evaporation may change significantly with slightly different conditions. Researchers at the University of Southern California have designed a new microfluidic platform on which the reagent droplet is expelled into the oil microchambers in predefined directions. 118 The method can significantly reduce the evaporation rate of the aqueous reagent. However, this method adds unwanted material to the reagent, which is not acceptable in many cases.
The plate-sealing method may be more widely used because of its simplicity and effectiveness. However, with this approach, another new problem arises. That is, peeling of the sealing is necessary if the samples or products need to be further operated. A common approach is piercing, for which different kinds of piercing pin arrays have been designed for high throughput while sealing is not removed, which may cause tip clogging and cross-contamination. Tecan Group Ltd. has introduced the Corning Robolid as a novel microplate seal and Te-Lidder as a robotic workstation accessory to remove the seal completely. This patented technology, however, is specially designed for Tecan workstations and TRAC robotic systems. 119 The design and realization of a universal automatic seal-removing module or method is needed for a high-automation dispensing process.
Viscous Material Handling
Automatic handling of highly viscous biomaterials at the nanoliter volumes is practically challenging, but it is an important task in biology research and the drug industry. Viscous materials can adhere to any tools they touch, and the droplet release takes longer.120,121 The OSU researchers performed a great deal of research to discover the control factors for automatic contact dispensing of highly viscous materials at the nanoliter scale.122,123 They found that the most important factor is the dispensing distance (i.e., the height of the dispensing needle tip above the base of the well). If the distance is too large, the biosample emerging from the needle can form a continuous tube and hence is not delivered to the well. If the distance is too short, the sample can ball up and stick to the needle. A mathematical model is presented for guiding the handling process, and an automatic robotic system has been developed for automated dispensing of viscous biosamples. 50
Unfortunately, there is no noncontact method for this task, although the noncontact or inkjet technology has been accepted more and more today as an effective and suitable process for liquid handling in life science. Piezoelectric or acoustic handling devices may not provide enough driving force to overcome the high viscosity, whereas solenoid-based products have a high risk of mechanical failure. Automatic liquid refilling and flowing for the tube is another problem that is generally a feasible process in low-viscous liquid dispensing. Extra-large driving forces will have to be used to achieve aspiration, which may need a new method or mechanism.
Evaluation and Calibration
Many factors can influence the performance of a dispensing process, such as the environment condition, the liquid property, and so on. Calibration is required by most exiting dispensing devices and workstations. The current commercial dispensing systems often use experiment calibration. The standard solutions with different volumes can be dispensed several times, and the accuracy and precision can be calculated.124,125 The gravimetric method works only for the mean accuracy of dispensed samples but not for individual ones when the volume is low. Spectrophotometric and radioisotopic methods can be affected by sample dilution and fluorescence decay.126,127 Computer vision has been attempted in the laboratory in recent years. A high-speed camera is used to record the whole process of droplet flight, and the droplet volume can then be recorded for geometrical analysis. 128 However, this method depends heavily on a high speed and an effective image-processing algorithm.
When the performance result is not acceptable, parameter adjustments are required. For example, for a robotic workstation with a contact dispensing method, the two prime factors to influence the dispensing volume are the moving speed of the pin and the time it stays in contact with the substrate. For noncontact dispensing, it is the open time of the valve (solenoid based) and the excitation amplitude or frequency (piezoelectric based). A common method is to draw a curve or template relating the parameters of the system and dispensed volumes by offline experiments. 129 When a calibration is out of error limits, parameters should be adjusted according to the relation templates. This is a time-consuming process, and some researches have tried to automate this process.130,131 A model-based method seems more possible to realize real-time adjustment. However, the fluid dynamic model is complex, especially with the non-Newtonian fluid, which is often used in dispensing, and completing a simulation of a dispensing process needs a large amount of computation. 132
Clogging Detection and Air Bubble Dissolution
Clogging is a usual problem in the inkjet industry. Dusty and viscous material, particles, or just the accumulation of liquid debris may cause clogging in tubes, valves, and dispensing heads. Air bubbles may form during a filling process, such as aspiration. Moveable parts inside a liquid flow can also cause air bubbles. The bubbles can absorb the driving pressure, affecting the dispensing performance, and when they exit in a liquid-level detection process, an error occurs.
The current real-time detection of clogging and air bubbles is based on a sensor method we introduced before. However, when a problem is identified, there is no a dissolution method online. A traditional method is to use ultrasonic cleaning after each use. A long-time ultrasonic cleaning may damage the dispensing head. Consequently, new nondestructive, effective, and real-time resolutions are needed for this problem.
System Integration
For automatic liquid handling, there is a trend of purchasing a large number of components and integrating them together instead of acquiring a complex and custom-designed system because no manufacturer can provide all the components needed for a workstation. Unfortunately, the components are often designed without the consideration of integration. Integrating all of them together in an optimal way thus poses a significant challenge. It is undeniable that newer equipment, tools, and accessories are becoming more integratable due to more standards established in the industry. However, as the degree of integration increases, another challenge arises: software interoperability between various components of the system. The robotic software should have a consistent and intuitive graphical user interface, be easy to use, allow integration with others, and provide helpful manuals to the users, to name just a few important attributes.
As mentioned earlier, a liquid-handling workstation can be expanded with optional accessories for different purposes. Laboratory researchers therefore can make a plan to build the workstation according to the requirements. Most manufacturers provide lists of supplies and product recommendations for customers. Along this line, the researchers must consider the balance between flexibility and throughput since there is usually a compromise between the two. If high flexibility is a more desired feature, throughput has to be sacrificed to a certain extent.
Conclusions
Because of the rise of research activities in life science and drug screening in recent years, there is a high demand for automated liquid-handling systems. The trend is in favor of those that can dispense smaller volumes and operate in a high-throughput fashion. The purpose is to reduce the volume of biosamples used in the experiments as well as to increase the efficiency of the experiments as both biosamples and labor are expensive. In addition, accuracy and precision are two important attributes of an ideal system. In the limited space of this article, we have reviewed the current state-of-the-art for automatic liquid handling, including fundamental technologies as well as new developments in the design of dispensing devices, robotic workstations, and various components used in the integration of the robotic workstations as being developed by both research and industrial organizations. Through this review, we can see that a large number of technologies and products are available for dispensing small-volume liquid in a high-throughput fashion. Nevertheless, challenges for advancing the field continue to arise, which present opportunities to researchers and engineers in the field to further develop new technologies.
Footnotes
Acknowledgements
The authors are grateful to the collaborative arrangement between The Ohio State University and the Shanghai Jiao Tong University which has facilitated this work.
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article. The given conflict of interest statement is accurate and correct.
The authors disclosed receipt of the following financial support for the research and/or authorship of this article: This work was supported in part by the U.S. National Science Foundation under grant IIS-0712845, in part by the China Scholarship Council to Fanwei Kong, and in part by the National High Technology Research and Development Program of China under grant 2006AA040203.