
Abstract
Study Design
A biomechanical study.
Objective
We aimed to assess temperature fluctuations when applying the ultrasonic osteotome during laminectomy and identify the most appropriate cutting method for robot-assisted laminectomy to mitigate the risk of heat-related injuries.
Methods
Utilizing a robotic system for laminectomy, the study implemented the ultrasonic bone scalpel to cut both artificial polyurethane bones and animal spinal bones. The research focused on comparing and analyzing the maximum temperature of the inner surface of four types of artificial bones through three different cutting techniques: vertical constant cutting at speeds of .5 mm/s and 1 mm/s, as well as robot-assisted vertical reciprocating cutting. After the initial results, two optimal vertical cutting approaches were selected for subsequent trials, evaluating the effectiveness and temperature impact of various ultrasonic osteotome modes on 10 isolated spinal bones from pigs.
Results
When cutting polyurethane bones, reciprocating cutting demonstrated the lowest maximum temperature in contrast to constant speed cutting at .5 mm/s and 1 mm/s. In the animal bone trial, direct cutting registered an average maximum temperature of 43.25°C with an average cutting duration of 688.3 s, while reciprocating cutting recorded an average maximum temperature of 34.20°C with an average cutting time of 713.0 s.
Conclusions
The reciprocating cutting strategy utilized in robot-assisted ultrasonic osteotome is effective in reducing heat generation and maintaining high cutting efficiency.
Introduction
Studies have shown that both high-speed abrasive drills and ultrasonic bone scalpels can easily exceed 50°C during bone cutting.1,2 This can lead to bone necrosis, adjacent nerve damage, and dural tears.3,4 When the temperature exceeds 47°C for 1 minute, bone tissue will be damaged to different degrees. 5 The maximum temperature tolerated by spinal cord tissue is about 44°C. 6 The critical value of nerve root damage is about 48.9°C7, and when exposed to 70°C for 5 min, nerve function is completely blocked. 8
The risk of injury to the spinal cord and nerves is the main concern of laminectomy, which is one of the key steps in spinal surgery. The sudden rise in temperature occurs at the bone surface, but if the temperature of the bone surface near the spinal cord and nerve roots is too high, the heat transferred to important tissues can exceed the threshold, causing possible damage. At the same time, if the depth is not controlled during the cutting process, the end of the hot bone-cutting tool may contact the dura mater or nerve roots directly, causing thermal damage. Therefore, the key issue related to safety in cutting is how to effectively control the inner laminar temperature during cutting operations.
We designed a collaborative spine robot system to assist with laminectomy before 9 and verified the accuracy test of this system through a cadaver study based on CT data. 10 This robot system uses the piezoelectric osteotome system as a bone-cutting tool and monitors whether the lamina will be penetrated based on force information. In order to monitor force feedback in real-time during the cutting process, the cutting mode is designed to be reciprocating cutting. The process involves cutting vertically downward at 5 mm/s, followed by backing up at 3 mm/s until the lamina is just through. Compared to the direct cutting mode in the force feedback process, this reciprocating cutting mode is safer.
Previous research has not determined which cutting method leads to reduced cutting temperatures and safeguards against thermal injury. In this research, we investigated the temperature control effect of the two cutting modes. This exploration not only offers insights into the security of robot-assisted laminectomy but also furnishes additional data reinforcement for selecting ultrasonic bone scalpel cutting techniques in routine spine surgeries.
Methods
Specimen Preparation
Informed consent is not required for this study. The experimental protocol was reviewed and approved by the relevant institutional Ethics Committee. In order to explore the method of cutting the inner wall of the lamina with the least temperature increase, we used artificial polyurethane bone blocks in two densities (#1522-02, density 240 mg/cm3; #1522-04, density 480 mg/cm3; Sawbone, Malmo, Sweden) and they were prepared into 5 mm and 10 mm thick standard blocks using a microtome (E300CP, EXAKT, Germany).
Animal spinal bone experiments were conducted on the isolated lumbar vertebrae of 10 experimental Guangxi Bama miniature pigs. After the completion of other research subjects, the experimental pigs were euthanized, and the unharmed lumbar vertebrae were extracted and segmented into individual spinal bones. The soft tissue attached to the lamina is removed, and the vertebral body is removed to directly expose the inner surface of the lamina and facilitate the observation of the inner wall surface of the lamina. The experiment was conducted within 1 day after the specimen was acquired.
Experimental Platform
The experimental platform consisted of a laminectomy robotic system, a specimen fixture and an infrared thermal imager (225,S, FOTRIC). The ultrasonic bone power unit in the laminectomy robot system was set at 85W with a flow rate of 50 mL/min to ensure the tip cooling and no excess cooling water. The thermal imager has a temperature range of −20 to 400°C and an infrared resolution of 320 × 240. The specimen to be cut was fixed by the specimen clamp, while the temperature of the internal surface of the model bone block or the internal surface of the lamina was captured by the infrared thermal imager, as shown in Figure 1. All experiments took place at 25°C room temperature, and the cooling water was normal saline at room temperature. Composition of experimental platform. It consists of laminectomy robotic system, specimen clamp and infrared thermal imager.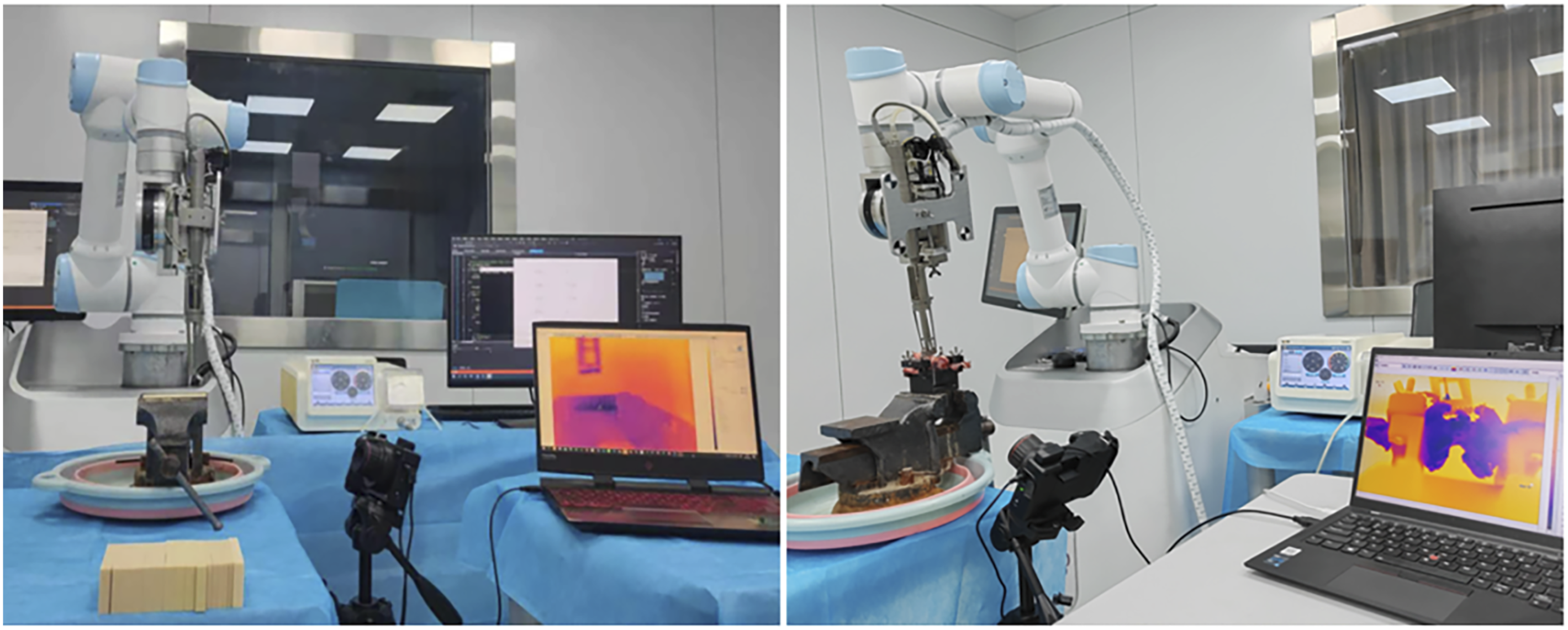
The robotic system consists of an operating system and a control system. The operating system includes a 6-degree of freedom (DOF) robotic arm (I5, AUBO Robotic Technology Co, Ltd), a force sensor (SRI, Shanghai Yuli Industrial), a piezoelectric (ultrasonic) osteotome system (XD880A, SMTP Technology) and an end effector. The end effector has 1 DOF in the vertical direction, and also includes a force sensor, (T1051, Changzhou Allison Technology), which is used to identify whether there is penetrating in the process of laminectomy.
The control terminal of the robotic system is integrated into the workstation of the trolley, and the interpretive operating software is installed on the workstation, through which the operator can control the ultrasonic bone scalpel. The scalpel’s tip is square and has a width of 3 mm and a thickness of .7 mm. This piezoelectric osteotome system operates at a frequency of 22.5 kHz, and the scalpel is continuously irrigated through its tip.
Study Design
Sample Types of Artificial Polyurethane Bone Blocks.
Based on the experiment of artificial polyurethane bone blocks, two optimal vertical cutting strategies were selected for further experiments on 10 isolated spinal bones of pigs. The robot cut continuously along the direction of the laminae, and there is overlap between each vertical cut, simulating the real robotic laminectomy scene. The animal bone was fixed on the fixture and the blade angle is manually aligned with the laminectomy direction (Figure 2). The two vertical cutting methods were carried out on the symmetric parts of the laminae on both sides of the same spinal bone. The maximum temperature generated by each cut on the inside of the lamina and the overall time taken to complete the unilateral laminectomy were recorded and compared between the two groups. Schematic diagram of reciprocating cutting. (A) The gray arrows signify the cutting process’s direction and trajectory, while the red arrows indicate that each cut entails a .5 mm vertical descent followed by a .3 mm retreat. (B) The situation after unilateral laminectomy. The grey line is close to the cutting groove.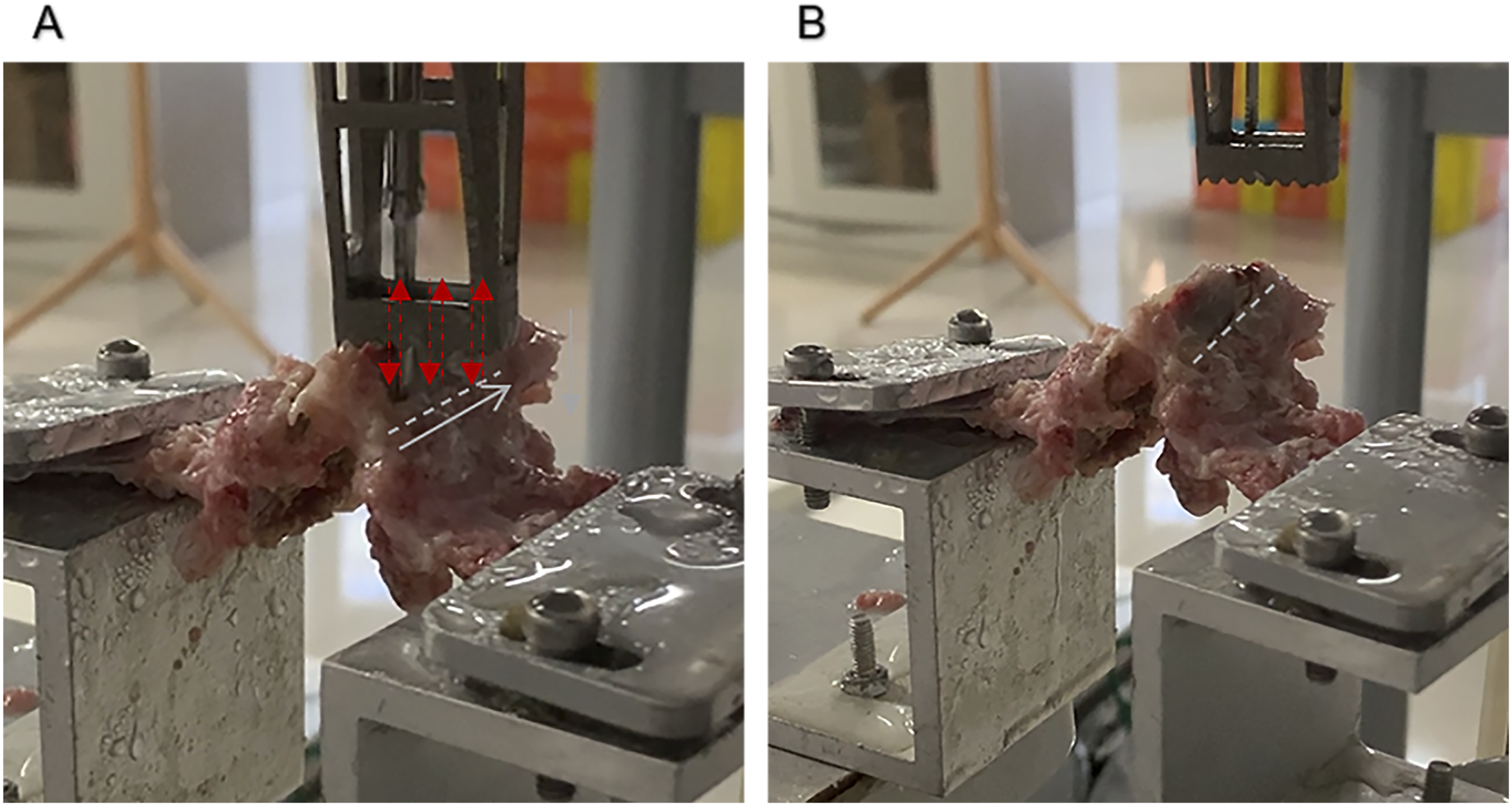
Statistical Analysis
SPSS version 26.0 statistical software (SPSS Inc) was utilized to analyze the collected data. Continuous variables subject to a normal distribution were expressed as mean ± standard deviation or upper and lower quartiles. Comparisons between three groups of artificial polyurethane bone blocks were made with using Kruskal-Wallis H test and one-way analysis of variance. Comparisons between two groups of animal bones were made using Mann-Whitney U test and independent samples t-test. Statistical significance was set at P value < .05.
Results
Maximum Temperature of Polyurethane Bone Blocks
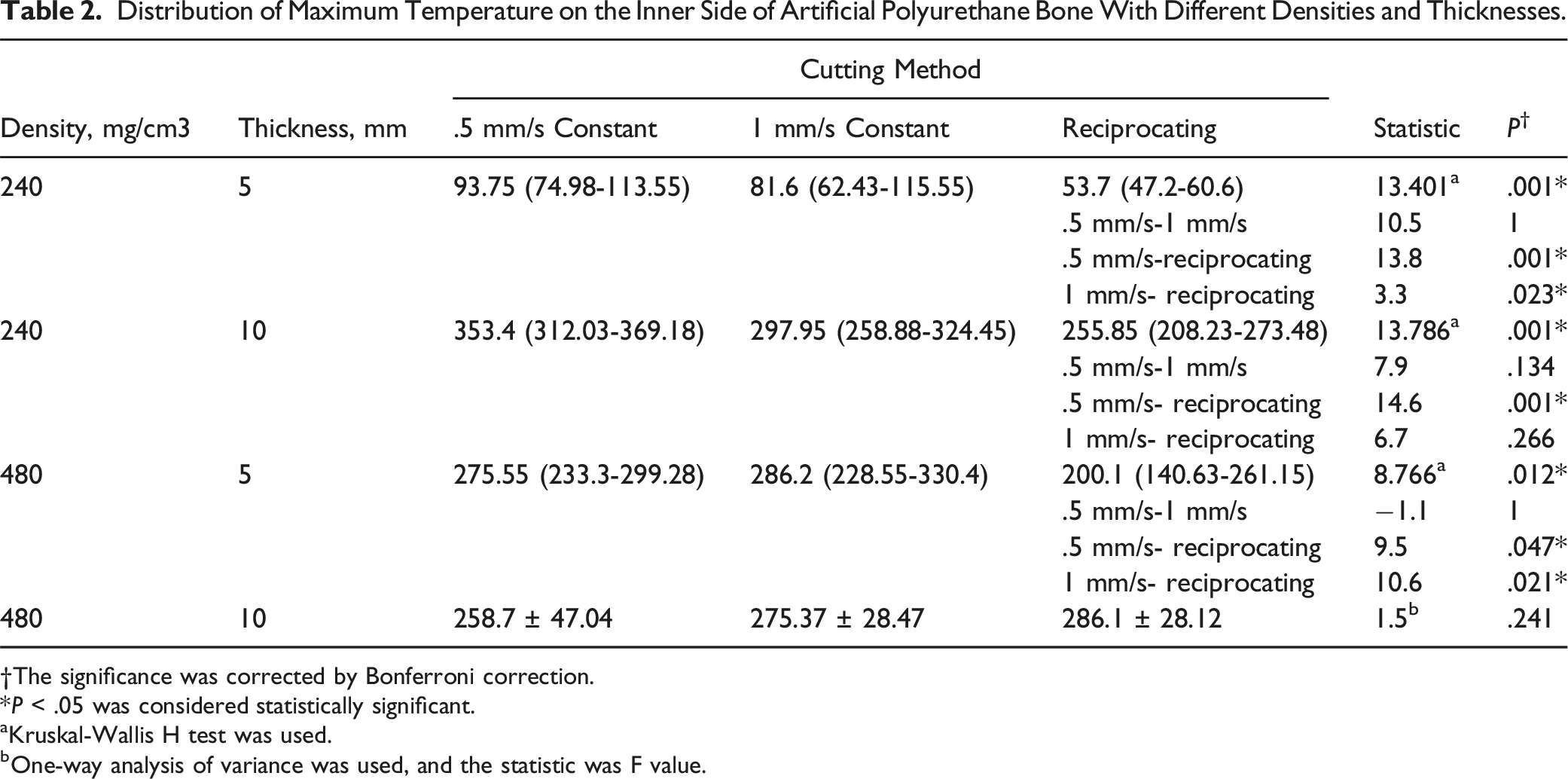
A total of 120 cuts were performed on artificial polyurethane bone blocks. When the Type I block was cut at a constant speed of .5 mm/s, the median maximum temperature (P25-P75) of the inner surface of the block was 93.75 (74.98-113.55)°C. For 1 mm/s constant speed cutting, the median maximum temperature was 81.6 (62.43-115.55)°C, and for reciprocating cutting, it was 53.7 (47.2-60.6)°C. Statistical analysis revealed a significant difference among the three groups (P = .001). In pairwise comparison, there was statistical significance between reciprocating cutting and .5 mm/s constant speed cutting (P = .001) and 1 mm/s constant speed cutting (P = .023). There was no significant difference between .5 mm/s constant speed cutting and 1 mm/s constant speed cutting (P = 1.0).
When cutting the Type II block at a constant speed of .5 mm/s, the median maximum temperature (P25-P75) of the inner surface of the block was 353.4 (312.03-369.18)°C. For 1 mm/s constant speed cutting, the median maximum temperature was 297.95 (258.88-324.45)°C, and for reciprocating cutting, it was 255.85 (208.23-273.48)°C. Statistical analysis revealed a significant difference among the three groups (P = .001). In pairwise comparison, the difference between reciprocating cutting and .5 mm/s constant speed cutting was statistically significant (P = .001). There was no significant difference between 1 mm/s constant cutting and reciprocating cutting (P = .266) and .5 mm/s constant cutting (P = .134).
When cutting the Type III block at a constant speed of .5 mm/s, the median maximum temperature (P25-P75) of the inner surface of the block was 275.55 (233.3-299.28)°C. For 1 mm/s constant speed cutting, the median maximum temperature was 286.2 (228.55-330.4)°C, and for reciprocating cutting, it was 200.1 (140.63.23-261.15)°C. Statistical analysis revealed a significant difference among the three groups (P = .012). In pairwise comparison, there were statistically significant differences between reciprocating cutting and .5 mm/s constant speed cutting (P = .047) and 1 mm/s constant speed cutting (P = .021). There was no significant difference between .5 mm/s constant speed cutting and 1 mm/s constant speed cutting (P = 1.0).
Distribution of Maximum Temperature on the Inner Side of Artificial Polyurethane Bone With Different Densities and Thicknesses.
†The significance was corrected by Bonferroni correction.
*P < .05 was considered statistically significant.
aKruskal-Wallis H test was used.
bOne-way analysis of variance was used, and the statistic was F value.
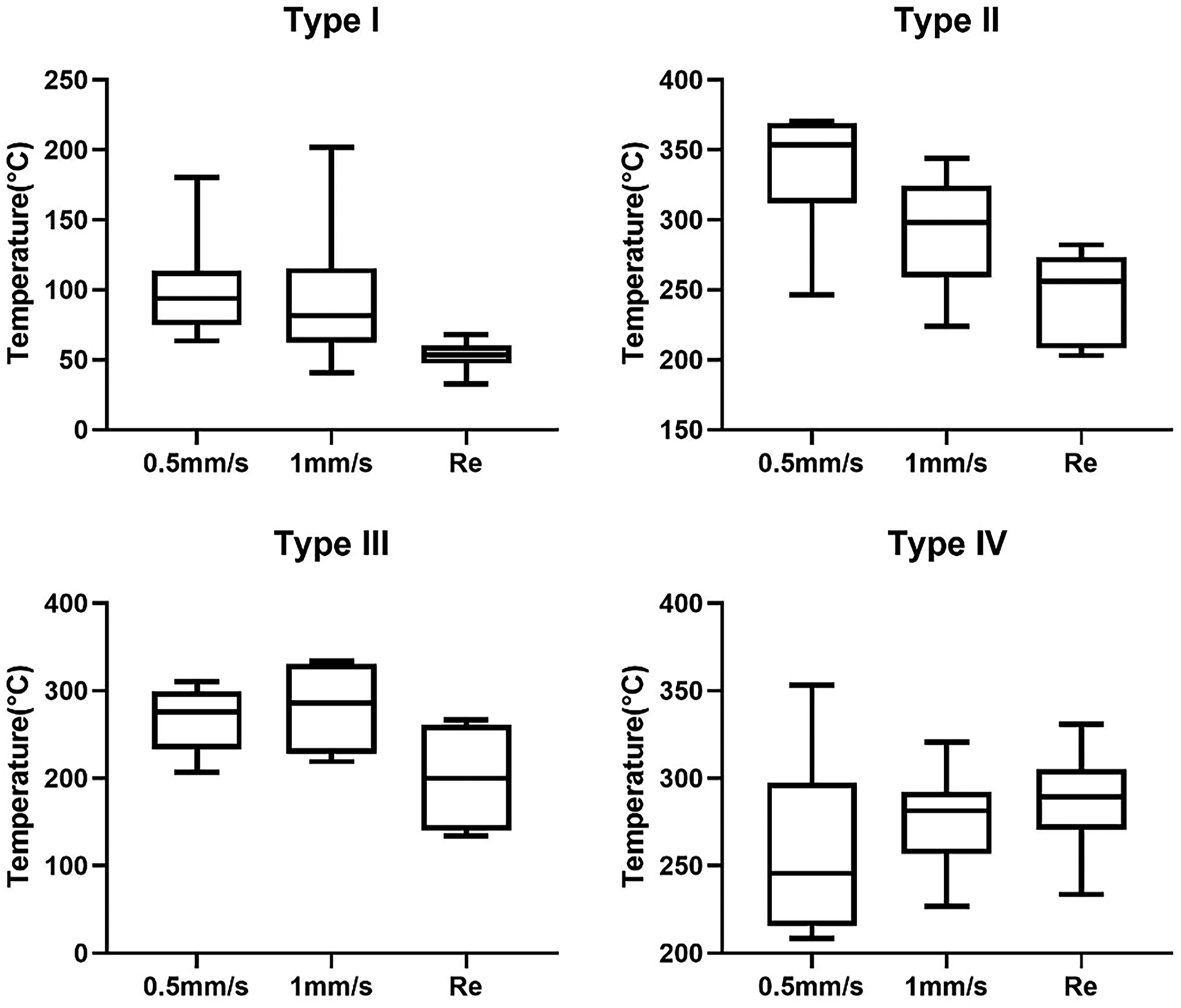
Distribution of maximum temperature on the inner side of artificial polyurethane bone with different densities and thicknesses.
Maximum Temperature and Penetration Time of Different Cutting Methods
The results of the previous experiment showed that the reciprocating cutting method has better temperature control ability compared to the constant speed cutting method. Although there was no significant difference in the maximum temperature between the .5 mm/s and 1 mm/s constant speed cutting methods, the latter was found to be more efficient. Therefore, for animal bone tests, we selected the 1 mm/s constant speed cutting and reciprocating cutting methods. During the tests, we performed a total of 92 constant-speed cuts and 85 reciprocating cuts on the isolated spinal bones of the pigs.
The median temperature (P25-P75) of the 1 mm/s constant speed cutting was 43.25 (38.03-49.58)°C, while that of the reciprocating cutting was 34.2 (32.75-36.75)°C. The difference between the two groups was statistically significant (P < .001). The distribution of maximum temperature between the two groups is shown in Figure 4. Additionally, the mean ± standard deviation of constant speed cutting time was 713 ± 105.23 s, while the average time of reciprocating cutting time was 688.3 ± 90.87 s. There was no statistical significance between the two groups (P = .323) (Table 3). Temperature comparison between 1 mm/s constant speed cutting and reciprocating cutting on animal bones. Temperature Comparison Between 1 mm/s Constant Speed Cutting and Reciprocating Cutting on Animal Bones. *P < .05 was considered statistically significant. aMann-Whitney U test was used, and the statistic was Z value. bIndependent samples t-test was used, and the statistic was t value.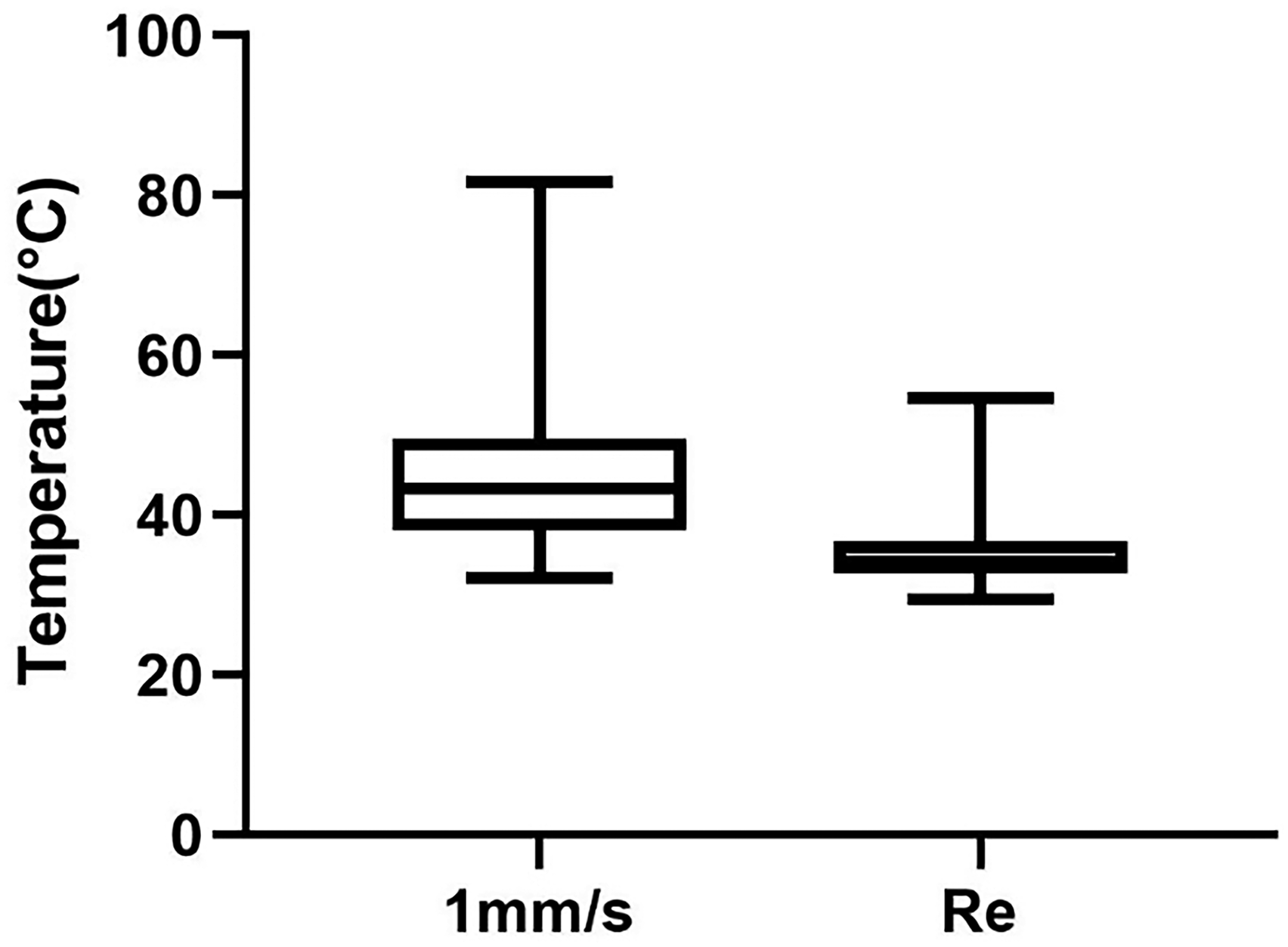

Discussion
The synthetic polyurethane bone block material has been endorsed by the American Society for Testing and Materials (ASTM) as suitable for comparative bone screw mechanical testing (ASTM F-1839-08). Due to its consistent density, Al-Abdullah et al. 11 utilized it in their research to simulate grinding force and maximum temperature outcomes, yielding positive outcomes. Additionally, considering the typical thickness of lumbar laminae based on prior literature, ranging around 6.7-7.8 mm, 12 the polyurethane bone blocks were crafted into 5 mm and 10 mm standard blocks to mirror laminae thickness. It’s important to note that these artificial bones are employed to eliminate density inconsistencies’ effects on maximum temperature, solely serving to assess various cutting methods’ pros and cons. The maximum temperatures observed in experiments may not accurately reflect actual bone cutting process peaks.
Both artificial bone and animal bone experiments outcomes indicate that the reciprocating cutting mode exhibits superior temperature control capabilities. Nevertheless, when faced with the thickest and most robust artificial bone blocks (Type IV), there was no significant difference in heat generation between the two cutting methods. This might be explained by excessive heat production during cutting, coupled with inadequate cooling water for swift heat dissipation. In actual surgical procedures, bones that are significantly hypertrophic are unlikely to exhibit the same level of hardness and density observed in our experiments. In the experiments on isolated animal bone, direct cutting recorded a maximum average temperature of 43.25 (38.03-49.58)°C, whereas reciprocating cutting showcased a maximum average temperature of 34.2 (32.75-36.75)°C (P < .001). However, given that human bones are denser and tougher than the pig bones utilized in this study, they could potentially reach higher temperatures during real surgical procedures. Taking into account the aforementioned circumstances, we are of the opinion that the reciprocating cutting approach is also likely to result in decreased thermal elevation throughout intricate surgical operations.
If the ultrasonic bone scalpel remains stationary for an extended period, there is an increased risk of thermal injury during the cutting procedure. Therefore, it is imperative to maintain movement while cutting bone to prevent localized nerve and dural thermal damage resulting from prolonged operation.13,14 The reciprocating cutting mode facilitates continuous movement of the scalpel tip, allowing for increased cooling water penetration into the cutting plane. Additionally, a greater number of cutting cycles reduces the feed rate of the tip and minimizes friction, potentially leading to reduced heat generation during reciprocating cutting.
The thermal energy produced during the cutting process is primarily influenced by factors such as the power output, cutting speed, tip size, and the amount of water used in the ultrasonic bone scalpel.15,16 We ensured the uniformity of these variables throughout the duration of the study. The vertical cutting speed was set at 1 mm/s based on our findings because exceeding this speed could resulted in tip breakage, while higher cutting speeds led to reduced heat generation and increased cutting efficiency. Additionally, bone mineral density was observed to impact heat production during laminectomy. To mitigate the impact of bone density in isolated bone experiments on animals, we selected laminae with consistent distance from both sides of the vertebral body to the spinous process as the cutting path, and ensured uniform thickness of the two laminae. Furthermore, the shape of the tip, rake angle, and margin width are influential factors affecting temperature and cutting efforts.17,18 These variables are not involved in this experiment, but can be used as the direction of further improvement of the ultrasonic bone scalpel.
The issue of spinal nerve heat injury cannot be overlooked when using bone powered surgical systems in spinal surgery. A safety hazard arises if surgeons neglect temperature control during the use of these tools. The achievement of this control can be attained through the acceleration of heat dissipation and the regulation of heat generation. The primary method employed is the application of saline irrigation. Takenaka et al. 19 reported that using chilled irrigation saline during bone drilling significantly decreased the upper limb palsy incidence. Tamai et al. 7 also reported that the incidence of nerve root injury in rabbit models with high-speed drill can be reduced by rinsing with frozen saline. Nonetheless, there is a limitation to this approach. If the incision into the bone is made too deep, the flow of saline solution to the tip of the scalpel is impeded, hindering the rapid dissipation of heat. Consequently, the management of heat generation is a critical consideration. Surgeons may intentionally decrease the cutting speed during manual operation to mitigate excessive heat production when they perceive that the temperature is becoming too elevated.
Robotic spine surgery will become more widespread as it continues to expand its applications to portions of the surgery beyond instrumentation. 20 Our previous work involved the development and utilization of a spinal robotic platform employing an ultrasound bone scalpel as the operative component for independent laminectomy procedures. This system is engineered to execute vertical cutting in a sequential manner, ensuring safety through force-based information. Our research has validated the precision of cutting depth and position through experimentation on models and cadavers.9,10 The robotic system maintained a consistent cutting velocity, which was instrumental in facilitating the condition of our experimental study. The ultrasound bone scalpel offers a precise, quick, and efficient approach to bone dissection, minimizing the potential for harm to the dural sac and nerve roots.21-24 The robotic system is designed to prevent mechanical damage caused by direct contact of the ultrasonic bone scalpel with the dural sac and nerve roots. However, the heat generated during cutting can still lead to nerve damage. Our findings indicate that vertical reciprocating cutting produces less heat and offers similar cutting efficiency compared to vertical constant speed cutting. This suggests that the vertical reciprocating cutting pattern can be implemented in autonomous robotic systems to enhance safety. Our results also have implications for the regular use of ultrasound osteotome for freehand laminectomy. Specifically, the use of ultrasonic bone scalpel should involve an increase in the number of cuts parallel to the laminae and a decrease in the number of cuts perpendicular to the laminae to minimize the potential risk of spinal cord and nerve root heat injury.
The study has several limitations. Firstly, it is an in-vitro study that utilized artificial bones and porcine vertebrae, which may not accurately represent the strength and heat dissipation mechanisms of human in-vivo bones. These differences cannot be replicated in our experimental process. Secondly, the study only measured the maximum temperature generated on the inner surface of the bone for each cutting operation, failing to capture the temperature changes throughout the entire cutting process. However, given the proximity of the inner surface of the laminae to the nerve root, monitoring the temperature of the inner surface is crucial for ensuring thermal safety during the cutting process. Lastly, while the focus was on heat production during laminectomy, the same research approach could be extended to other spinal structures such as the vertebral body and more complex pathological bone structures. Further experiments are necessary to confirm the generalizability of this cutting method.
Conclusion
With the aid of a robotic system, it is both feasible and imperative to investigate the thermogenesis of the ultrasonic bone scalpel across various cutting modes. Our findings indicate that the reciprocating bone-cutting mode can mitigate heat generation and exhibit superior cutting efficiency. This reciprocating cutting approach presents a more favorable safety profile for employment in both robotic spinal surgery and traditional spinal surgery.
Footnotes
Author Contributions
Chengxia Wang and Zhuofu Li designed the study, Zhuofu Li executed experiments, Woquan Zhong analyzed and interpreted the data, Shuai Jiang interpreted the data, Chengxia Wang wrote the manuscript, Weishi Li edited the manuscript. All authors read and approved the final manuscript.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [U20A20199 to Woquan Zhong], National Key Research and Development Program of China [2018YFB1307604 to Weishi Li].
Ethical Statement
Data Availability Statement
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.