
Abstract
Background:
Technology has the potential to prevent patient falls in healthcare settings and to reduce work-related injuries among healthcare providers. However, the usefulness and acceptability of each technology requires careful evaluation. Framed by the Technology Acceptance Model (TAM) and using the Adaptive Robotic Nursing Assistant (ARNA) to assist with patient ambulation, the present study examined the perceived usefulness of robots in patients’ fall prevention with implications for preventing associated work-related injuries among healthcare providers.
Methods:
Employing an experimental design, subjects were undergraduate nursing students (N = 38) and one external subject (not a nursing student) who played the role of the patient. Procedures included subjects ambulating a simulated patient in three ways: (a) following the practice of a nurse assisting a patient to walk with the patient wearing a gait belt; (b) an ARNA-assisted process with the gait belt attached to ARNA; (c) an ARNA-assisted process with a subject walking a patient wearing a harness that is attached to ARNA. Block randomization was used with the following experimental scenarios: Gait Belt (human with a gait belt), “ARNA + Gait Belt” (a robot with a gait belt), and “ARNA + Harness” (a robot with a harness). Descriptive statistics and a multiple regression model were used to analyze the data and compare the outcome described as the Perceived Usefulness (PU) of a robot for patient walking versus a human “nurse assistant” without a robot. The independent variables included the experimental conditions of “Gait Belt,” “ARNA + Gait Belt,” and “ARNA + Harness,” the subject’s age, race, and previous videogame playing experience.
Findings:
Results indicated that PU was significantly higher in the Gait Belt + ARNA and Harness + ARNA conditions than in the Gait Belt condition (p-value <.01 for both variables). In examining potential influencing factors, the effects of race (White, African American, and Asian), age, and previous video-playing experience were not statistically significant (p-value >.05).
Discussion:
Results demonstrated that using robot technology to assist in walking patients was perceived by subjects as more useful in preventing falls than the gait belt. Patient fall prevention also has implications for preventing associated work-related injuries among healthcare providers.
Implications:
Understanding the effects of a subject’s perceptions can guide further development of assistive robots in patient care. Robotic engineers and interdisciplinary teams can design robots to accommodate worker characteristics and individual differences to improve worker safety and reduce work injuries.
Background
Patient falls are a major concern in healthcare. In the United States alone medical costs associated with nonfatal fall-related injuries account for more than $50 billion, and spendings on fatal fall costs exceed $754 million (Centers for Disease Control and Prevention [CDC], 2024). In 2015, the total healthcare spending attributable to falls totaled more than $49.5 billion (Florence et al., 2018). For decades, hospitals have deployed strategies to reduce inpatient falls by focusing on patient fall risk assessments and nurse education—with few applications of technology (Zhao et al., 2019). The use of technologies has the potential to prevent patient falls as well as prevent workplace injuries in nurses related to patient falls, an area of concern for professionals focusing on workplace safety. Data related to the use of technology in preventing falls are mixed. For example, Coahran et al. (2018) found that a fall detection system only missed one clinically documented fall but detected four non-clinically documented falls. By contrast, Lipsitz et al. (2016) reported that a fall-detecting device recorded only 19% of the 89 falls that nurses manually recorded. Clearly, more work in this area is indicated.
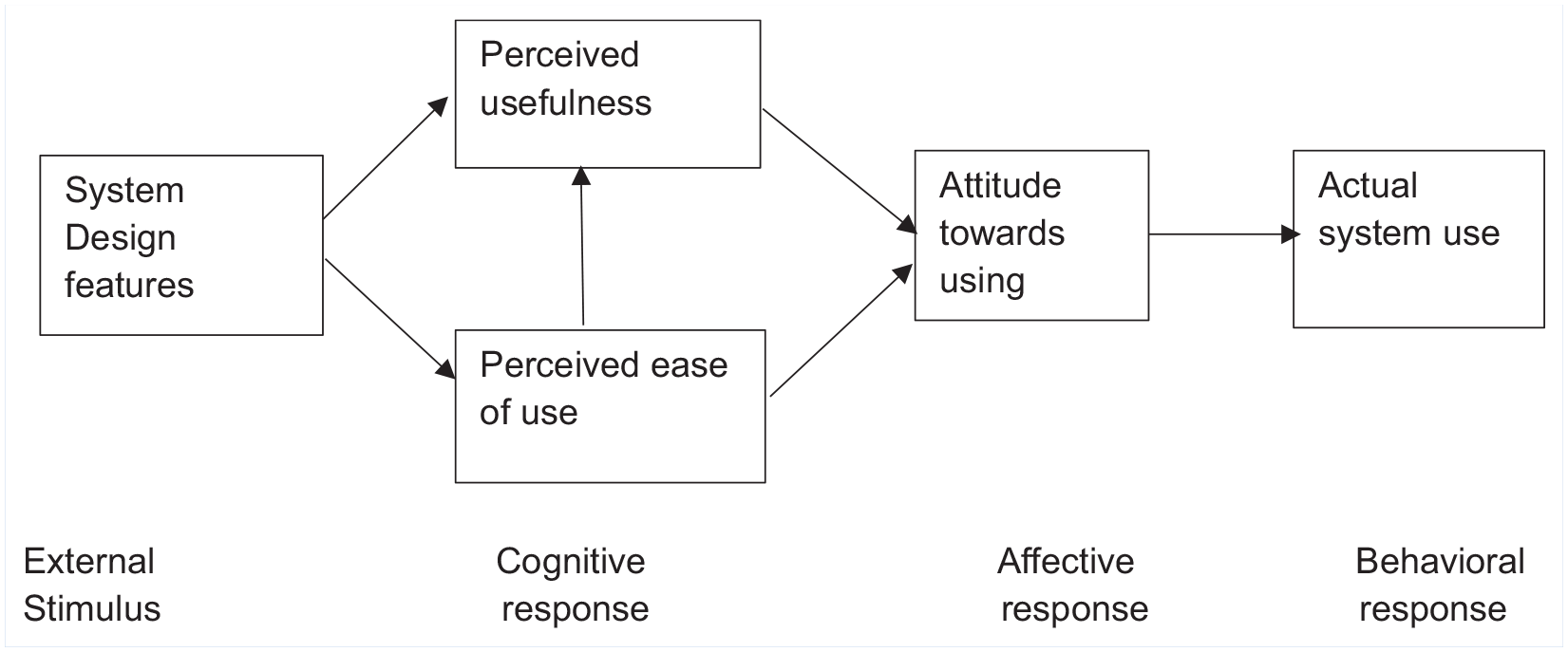
User acceptance of technology is important to consider (Choi & Swanson, 2021). The Technology Acceptance Model (TAM) was initially developed by Davis (1985, 1989) to identify attitudes and factors that may affect user’s acceptance of new technology. Initially, factors such as Perceived Usefulness and Perceived Ease of Use were considered to affect the attitude of the user, which was defined as the “general impression of the technology” (Davis, 1989). It was also conjectured that the attitude defines the behavior intention of the user. The schematic representation of the interrelations between various TAM constructs, Perceived Usefulness, and Perceived Ease of Use are provided in Figure 1. Later, the initial framework was expanded to include more external variables that may affect Perceived Usefulness and Perceived Ease of Use (Venkatesh, 2000; Venkatesh & Davis, 2000) and the Unified Theory of Acceptance and Use of Technology (Venkatesh et al., 2003) was proposed.
Technology Acceptance Model
Several studies employing TAM provide potential insights for the current study. Hauk et al. (2018) demonstrated that technology acceptance decreases as people age. Mitchell et al. (2019) reported that racial and ethnic minorities show lower health-related technology use compared with Whites and this discrepancy increased with age. Morán et al. (2014) found that previous experience with the use of a computer or game console had no significant effect on the perceived usefulness, ease of use, intention of use, and user experience of the elderly. Nevertheless, the effect was significant for perceived anxiety, which was slightly higher for the participants of the inexperienced user group. For this reason, age, race, and previous experience with gaming were measured in this study.
There is limited research in reporting work-related injuries to healthcare providers (HCPs) associated with robots. One study demonstrated that medical robotics could quickly react to an accident or emergency involving the target person via a wireless system (Jang et al., 2021). However, there are reports describing the many ways robots could serve healthcare professionals by completing routine logistical tasks and sending a report once a task has been completed. Tasks may include preparing patient rooms, tracking supplies, filing purchase orders, restocking medical supply cabinets, and transporting bed linens to and from laundry facilities (AdventHealth University, 2022).
Transfer or walking belts (GB) have been used by HCPs to assist patients with mobility tasks, such as transfers or ambulation. Full-Body Fall Protection Safety harnesses are safety devices that include several straps over the thighs, pelvis, waist, chest, and shoulders connecting the patient to a structure (in our case to the Adaptive Robotic Nursing Assistant [ARNA] robot), to arrest falls and to minimize injury to the patient. According to the American National Standards Institute (ANSI), walking belts may create hazards leading OSHA to prohibit body belts in 1998 as a means of personal protective equipment (PPE) for fall prevention (Occupational Safety and Health Administration [OSHA], 2024). The major advantages of the full-body harness over body belts include the uniform distribution of forces throughout the body during a fall (Kelechava, 2021). This study will focus on the perceived usefulness of three scenarios, two of which involve robots, that involve assistive devices to prevent falls.
Methods
Study Design
The present study examined the perceived usefulness of robots in patients’ fall prevention with implications for preventing associated work-related injuries among HCPs. In an experimental design using between-subjects block randomization, three groups of subjects (pre-licensure nursing students) were assigned to one of three interventions, two of which incorporated robots, to examine the perceived usefulness of assistive devices to prevent falls. An external subject who was not a nursing student played the role of the patient throughout the experiment under all conditions.
Participants
For this convenience sample, enrollment of 60 subjects was planned. Subjects were recruited from the School of Nursing pre-licensure programs via class announcements and announcements at social events on campus. Inclusion criteria included that participants were pre-licensed nursing students (BSN and MEPN) from the School of Nursing. Exclusion criteria included the inability to perform the tasks. Three clinical hours were awarded as compensation for participation in the study. Thirty-eight students enrolled as participants.
Instruments and Variables
Variables included perceived usefulness of intervention in falls prevention, previous video game experience, and demographics. Based on the TAM (Davis, 1985, 1989), four items measured perceived usefulness of the intervention (Davis, 1989) on a Likert-type scale (range, 1–5): enable nurses to complete patient care more quickly, improve patient care and management, increase nurses’ productivity in patient care, and make nurses’ patient care and management easier. One question measured previous video game experience (Likert-type scale variable, range 1–5): Please indicate the degree to which you are familiar with playing video games. Participants chose demographic variables of gender and ethnicity based on categories used by the university, and they entered their age manually. Perceived usefulness was considered to be a dependent variable and other variables as independent variables. The independent variables include a dummy-coded experimental SetUp variable (reference: “GB+Human”), race (reference: “White”), gender (reference: “male”), age, and previous video game playing experience.
Intervention
The robot ARNA was designed by engineers in the Louisville Automation and Robotics Research Institute (LARRI) to potentially assist and help nurses with routine tasks. Adaptive Robotic Nursing Assistant is a human-sized mobile platform augmented with a 6 degree-of-freedom robot arm with a built-in multitude of safety sensors (such as Kinect, ultrasonic, and infrared sensors), and user interface input devices (such as tablet app and joystick). Three types of intervention scenarios were employed to ambulate the patients coded as Gait Belt + Human (gait belt with human), GB + ARNA (gait belt with ARNA robot), and Harness + ARNA (a full-body fall protection safety Harness attached to ARNA robot). The location of the intervention took place at the LARRI lab, with a simulated patient room and hospital corridor.
Data Collection Procedure
In the three scenarios, the “patient” was sitting on a bed and the ARNA robot was positioned at the room entrance. Then, the subject (nursing student) followed scripted study procedures by entering the room, and putting the test devices such as a transfer/walking belt (gait belt [GB]) or a full-body fall protection safety harness (Harness) on the patient while standing at the side of the patient and robot. The subject consistently held either GB or Harness from the back of the patient and ambulated with the patient and robot along a predefined path. To properly wear the harness, the subject started by inspecting it for safety before putting it on the patient. The patient stepped into the leg loops and pulled the harness over their hips and waist, ensuring a snug fit without discomfort, and fastened all buckles securely and adjusted the straps evenly. Next, the subject made a final check for proper positioning and symmetry before starting the experimental trial. As shown in Figure 2, the harness is held by a ring in the middle of the back between the shoulder blades by a subject and is connected to the two hooks on the robot’s frame, as opposed to the gait belt held at the waist. Furthermore, an emergency button was placed on the subject’s side to enhance safety measures, and safety sensors were added to the robot to avoid collision with the environment. The patient had full guidance control over ARNA, via hands holding the handlebar and tugging it gently to move it forward, backward, sideways, or turn, as shown in Figure 2. In all ambulation periods, the subjects with the patient followed a straight 46.5-foot-long path with one right hand side turn (placed 15 foot away from the starting point). The ambulation part of the experiment lasted around 3 to 10 minutes depending on whether a robot was used. After an experiment, the subject completed a questionnaire administered via iPad using a Qualtrics Platform. The questionnaire was developed based on previously published research (Chen et al., 2008; Davis, 1989). The data were stored in an online cloud using the Qualtrics Platform. The data were downloaded in CSV format and analyzed using R software; only research personnel had access to the data.
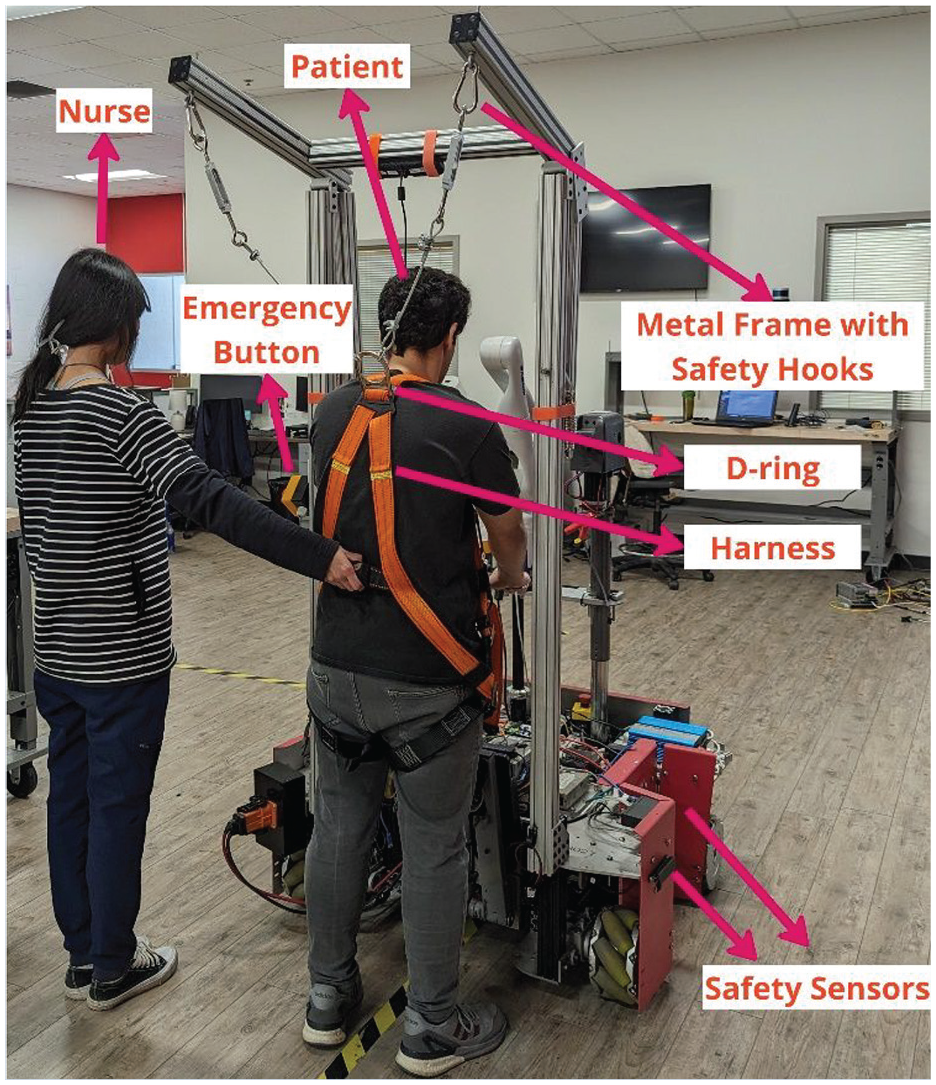
Example of Experimental Positions Between the Patient and the Nurse
Data Analysis
Quality checks and data cleaning were performed using R version 4.1.2 4 software. All participants’ personal information was de-identified after matching survey data with performance data. The relationship between the outcome, a perceived usefulness, and the rest of the independent variables was estimated using a Ordinary Least Squares multiple regression model via library(lm). A set of different regression models was tested using library (olsrr). Various model fit indices (Akaike information criterion [AIC], Mallows’s Cp, and adjusted R2) were inspected to choose a single best model. F-test was used to test the hypotheses. Confidence intervals and p-values were generated from a Wald t-distribution approximation.
Results
There were 38 nursing students included in the analysis. Table 1 summarizes the descriptive results for the subjects’ demographic characteristics and other variables. There were 92% females (Mean age = 23.61 years, range = 18–40 years old, SD = 5.1); 68.42% identified themselves as White, 26.32% as African American, and 5.26% as Asian. The mean value of the videogame playing experience was 2.92 years (Likert-type scale, range = 1–5, SD = 1.15).
Characteristics of Subjects and Variables
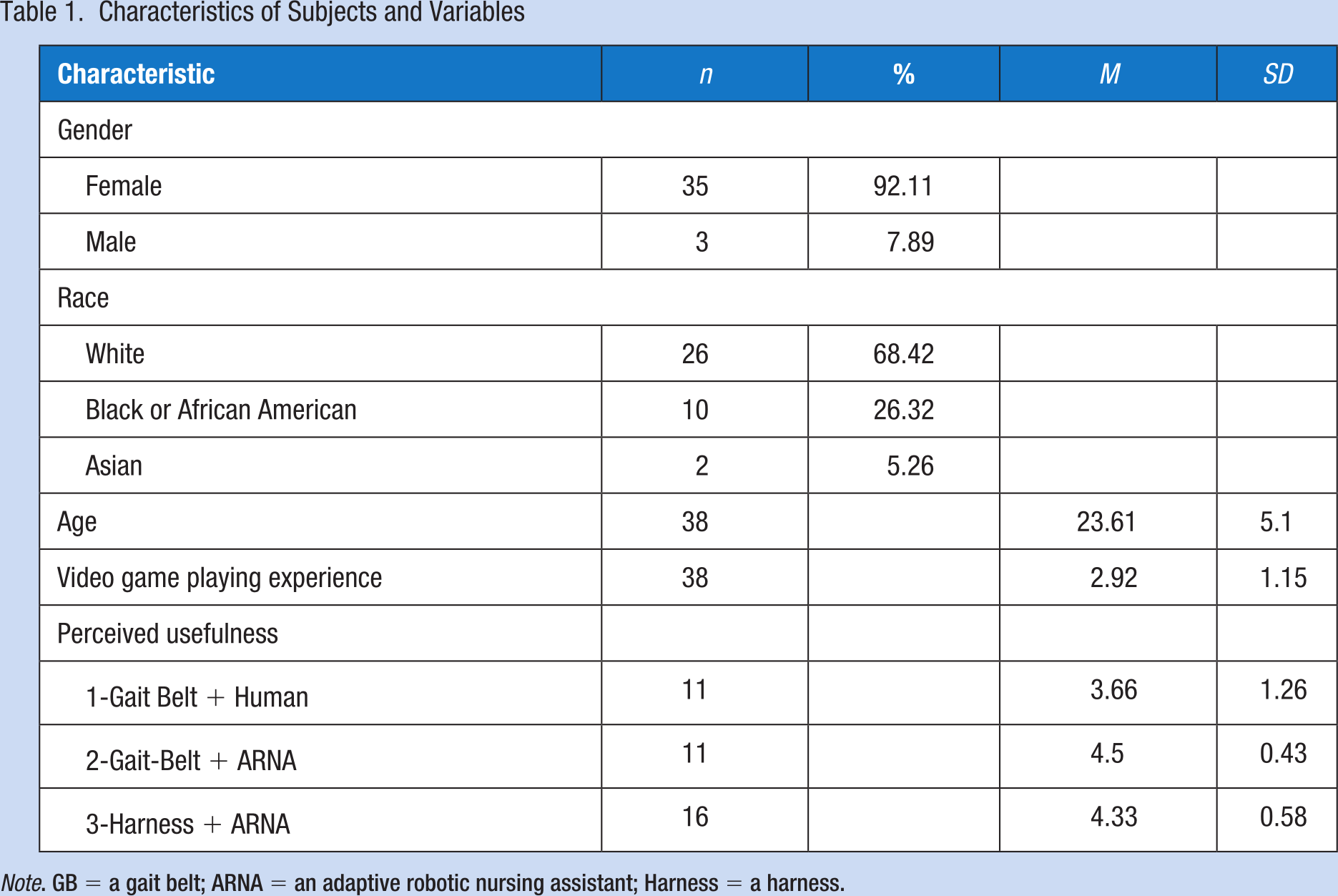
Note. GB = a gait belt; ARNA = an adaptive robotic nursing assistant; Harness = a harness.
In terms of other descriptive data, mean and standard deviation scores were calculated for each survey item for participants assigned to each intervention. For perceived usefulness Item 1 (Enable nurses to complete patient care more quickly), participants assigned to the GB task had corresponding means (M) and standard deviations (SD) of M = 3.7(SD = 1.42); for the Harness + ARNA task scores were M = 3.75 and SD = 1; for the GB + ARNA scores were M = 4.04 and SD = 0.88. For Item 2 (improve patient care and management), for participants assigned to the GB task, scores were as follows: M = 4 and SD = 0.94; for the GB + ARNA task, scores included M = 4.28, SD = 0.71; for the Harness + ARNA task, scores were M = 4.625, SD = 0.5. See also Figure 3 for boxplot of perceived usefulness data for three conditions.
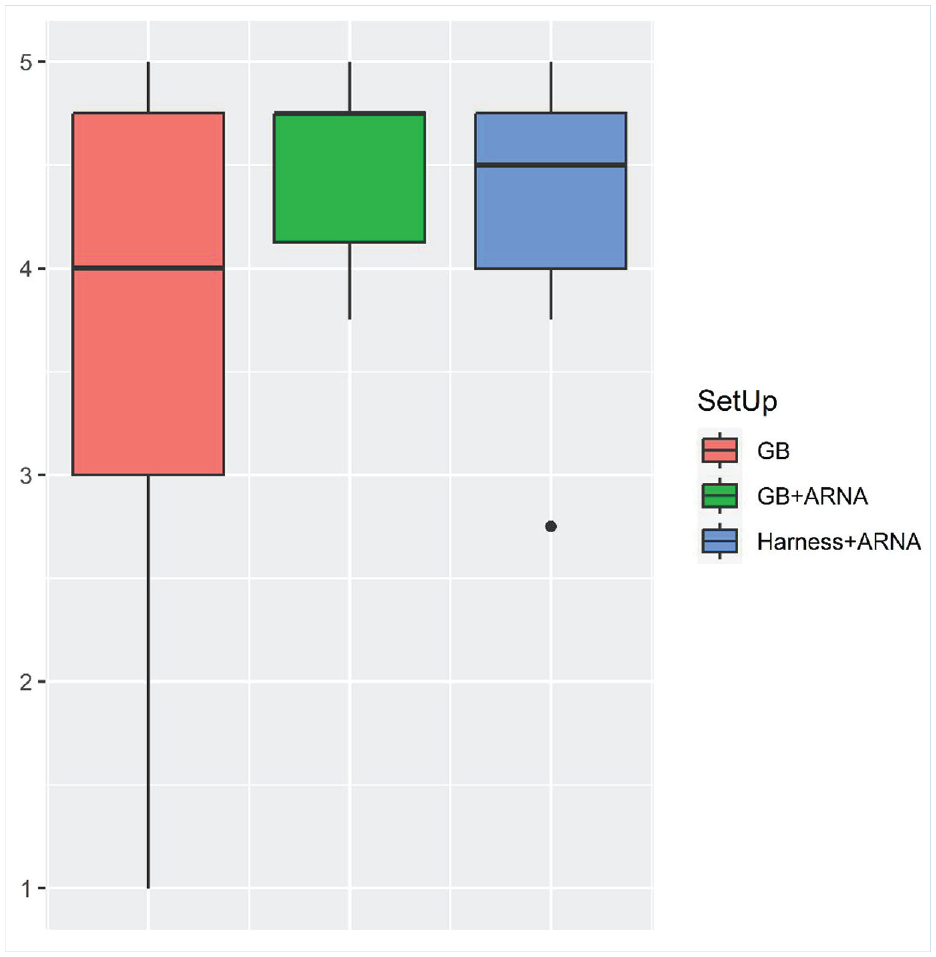
Boxplots of Perceived Usefulness for the Three Conditions
For Item 3 (increase nurses’ productivity in patient care), for participants assigned to the GB task scores were as follows: M = 3.7(SD = 1.19); for the GB + ARNA task, scores were M = 4.17(SD = 0.9); for the Harness + ARNA task, the corresponding means (M) and standard deviations were M = 4.31 (SD = 0.7). Finally, for Item 4 (make nurses’ patient care and management easier), for participants assigned to the GB task, scores were M = 4 (SD = 1.05); for the GB + ARNA task, the corresponding means (M) and standard deviations (SD) were M = 4.42 (SD = 0.69); for the Harness + ARNA task, scores were M = 4.63 (SD = 0.8). The estimates of Cronbach’s α for the GB task is .73, for the Gait Belt + ARNA task is .9, and for the Harness + ARNA task is .74, and these results indicate acceptable reliabilities for scores of our total measure of perceived usefulness in each task.
It can be seen immediately from Table 1 that the mean value of the GB + human condition (M = 3.66, SD = 1.26) is lower than for both GB + ARNA (M = 4.5, SD = 0.43) and Harness + ARNA conditions (M = 4.33, SD = 0.58). The effect size calculations (Cohen’s d) were d = 0.89 for GB + human versus GB + ARNA and d = 0.73 for GB + human versus Harness + ARNA. These effect sizes are large and demonstrate the importance of the differences in means for human versus robot assistance.
The results of the model fitting are presented in Table 2. The best subset of the predictors for the multiple regression model includes set up, age, and race variables (
Regression Results for Perceived Usefulness
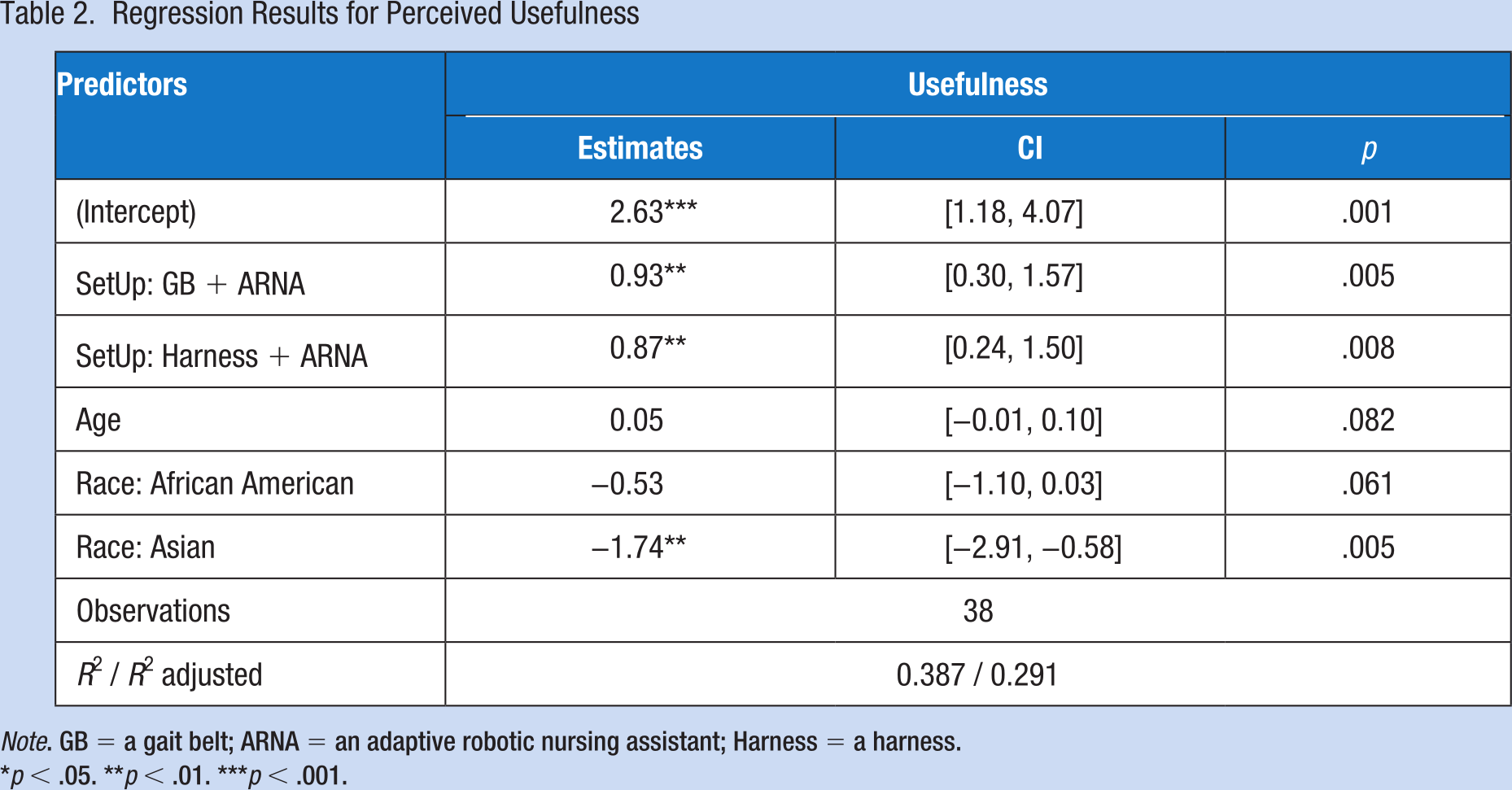
Note. GB = a gait belt; ARNA = an adaptive robotic nursing assistant; Harness = a harness.
p < .05. **p < .01. ***p < .001.
The University Institutional Review Board granted approval to conduct the experiments.
Discussion
Results demonstrated that using robot technology to assist in walking patients was perceived by subjects as more useful in preventing falls than the gait belt. Technology has the potential to help with routine care for patients but also may help with reducing work-related injuries for nurses (Brinkmann et al., 2022). He et al. (2018) focused on the underlying mechanism that explains the adoption of technology. When people believe that the technology is useful (perceived usefulness), they are more willing to use the technology (response efficacy). The Center for Occupational Robotics Research within CDC’s National Institute for Occupational Safety and Health has addressed the safety of today’s workers. Robots can improve worker safety by doing work that is especially dangerous, and service robots may help healthcare workers safely lift patients eliminating debilitating musculoskeletal injuries (CDC, 2021). Traditional patient handling is one of the most significant obstacles leading to musculoskeletal injuries among healthcare professionals. Advanced innovations that are designed to the physical capacity of nurses individually can enhance traditional working techniques. A study evaluated the use of a robotic system in providing physical relief by collaboratively assisting nurses in traditional patient-handling tasks and found that the use of collaborative robotics significantly reduced maximum force exertion in the caregiving process by up to 51% (Brinkmann et al., 2022). In the present study, the result of the perceived usefulness of technology was regressed on participants’ demographic and video-playing experience. Perceived usefulness was rated much stronger in the two scenarios of ambulating a patient with the robot (ARNA with a gait belt and harness conditions) versus the scenario ambulating a human with a gait belt (without ARNA). None of the descriptive variables (demographic, videogame playing experience) were related to perceived usefulness.
Limitations of the study included the small sample size, which potentially provides unstable parameter estimates, and the use of nursing students, which limits the potential generalizability of study findings to clinical practice. However, the study provides a step to testing robots with humans to prevent falls. Further research should investigate additional characteristics of individuals, the work setting, the dose of the intervention, and the robot itself that may predict widespread acceptance and use of technology.
Implication for Practice
Equipping nurses with technology can potentially reduce workload and improve patient care. Robot collaboration for ambulation was perceived by nurses as more useful than the gait belt only procedure (Gait Belt + human), indicating that robots may improve patient ambulation. Although fall detection has improved with technology, ARNA ultimately targets fall prevention, and the present intervention study helps us understand nurses’ perceived usefulness as a predictor for robot use. Understanding the perceived technology usefulness encourages developing and testing ARNA procedures within a range of other useful scenarios. Overall, this study supports the possibilities of technology utilization in practical healthcare settings.
One of the solutions to the enormous shortage of nursing professionals in the United States (Marć et al., 2019; Murray, 2002) includes the development of automated systems that could replace or assist with some routine nursing tasks, particularly tasks with the potential to cause workplace injury. An early implementation of the ARNA robot into a hospital or nursing home setting can serve its purpose of reducing the workloads of the nursing staff, creating a healthy, safer, and less burdensome work environment. That, in turn, can help with recruitment and retention efforts of nursing professionals. Potentially, it could be challenging to accept disruptive innovations; therefore, user participation is an important antecedent to the acceptance of assistive robots (Badr & Dankar, 2022).
Applying Research to Occupational Health Practice
The nursing occupation includes caring for the patient, mind, body, and soul. This expectation of the nursing role includes meeting the most basic needs of the patient, including ambulation.
Nursing practice includes aiding patients in sit-to-stand movements, ambulation, and walking, all activities of daily living. Research with ARNA robot directly applies to nurses that work with patients as well as occupational health nurses that develop guidance, policies, and procedures for safe and effective patient care.
The nursing occupation has a high number of physical injuries due to the manual labor component of the work, including moving the patient. The ARNA robot has the potential to reduce the amount of physical strain that is placed on the body during patient walking.
Footnotes
Acknowledgements
We would like to thank the nursing, biostatistics, and engineering students and other multidisciplinary colleagues who participated in this study, as well as our collaborator Dr. William Paiva.
Author Contributions
All authors have had input into drafting the manuscript or revising it critically for important intellectual content; AND Final approval of the version to be published; AND Agreement to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved. Drs. Popa, Logsdon, Nasraoui, and Edwards made substantial contributions to the conception and design of the work. The following co-authors were involved with the acquisition, analysis, or interpretation of data for the work: Nancy Zhang, Irina Kondaurova, M. Cynthia Logsdon, Emmaline B. Wuensch, Sumit K. Das, Moath HA. Alqatamin, Payman Sharafian Ardakani, Dan O. Popa, Marjorie Edrmann, Hyejin Yu, and Heather Mitchell. All authors are associated with the Louisville Automation & Robotics Research Institute (LARRI), University of Louisville.
Conflict of Interest
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the National Science Foundation grant #2026584, FW-HTF-RM: “Enhancing Future Work of Nursing Professionals through Collaborative Human-Robot Interfaces” to Dr. Popa at the Louisville Automation and Robotics Research Institute (LARRI), University of Louisville. The study was funded by the National Science Foundation (NSF grant IIP-1643989, Dan Popa, PI) and approved by the Human Subjects Protection Program, University of Louisville (18.0659), initial IRB approval date: 8/6/18.