
Abstract
Introduction
To reduce muscle strain and enhance user comfort, a Pneumatically Actuated Soft Wearable Robotic Elbow Exoskeleton was developed. The design integrates human joint mechanics with a single-piece pneumatic structure for optimal assistance and reduced complexity.
Methods
Nineteen participants performed tasks under “Support On” and “Support Off” conditions to evaluate their effectiveness and feasibility. Muscle activity was measured using Surface Electromyography, while torque output and inflation times were assessed to gauge mechanical performance.
Results
The Soft Wearable Robotic Elbow Exoskeleton reduced muscle activity in the biceps by 22.36% and in the triceps by 18.19% at 18 PSI (Pounds per Square Inch). Torque tests revealed a maximum output of 4.39 Nm at 21 PSI. Inflation time tests showed that the exoskeleton could reach total inflation in as little as 0.22 seconds in high mode at 25 PSI, demonstrating the ability to achieve rapid actuation speed and efficiency.
Conclusions
These results indicate that the Soft Wearable Robotic Elbow Exoskeleton significantly reduces muscle activation, which may help mitigate the risk of work-related musculoskeletal disorders. By providing effective assistance during repetitive tasks, the exoskeleton enhances both mechanical performance and user comfort.
Keywords
Introduction
In the last 10 years, assistive
Related research
Research on exoskeletons has been ongoing for nearly 64 years since the 1960s, with significant progress in recent years. 12 While most of the research has focused on lower limb exoskeletons, limited progress has been made in upper limb exoskeletons due to the complexity of the human upper extremity. 7 However, several key innovations have emerged to alleviate muscle strain through exoskeleton technology. The primary distinctions in exoskeletons are whether they are passive or active (unpowered or powered), rigid or soft, and their mode of actuation (fluidic or cable-driven).6,8
Although little explored comparatively, Soft Wearable Robotic exoskeletons have been known to enhance human movement, augment physical capabilities, and support rehabilitation while being lightweight and versatile. 6 Unlike traditional rigid exoskeletons, soft wearable robots utilize flexible, lightweight materials and innovative actuation mechanisms to provide more comfortable and adaptive assistance. Recent advancements in soft robotics have revolutionized the design and development of these wearable devices. 13 High-force soft actuators are capable of generating significant force while maintaining a minimal weight profile, making them ideal for wearable robotics where comfort and minimal weight are crucial. 14 The combination of soft and hard robotic elements in rehabilitation devices has shown improved motor function recovery for patients with movement impairments. This hybrid approach benefits from soft materials’ flexibility and hard components’ stability (Irshaidat et al., 2019). 15
Nassour et al. (2021) investigated a fabric-based soft pneumatic elbow exoskeleton that significantly reduced muscle activity and metabolic cost during load-handling tasks. This suggests that such devices can improve worker efficiency and reduce fatigue in industrial environments. 16 Research into pneumatic energy sources, such as compressed air tanks, has shown ways to power autonomous wearable exoskeletons effectively. This balances power supply and device portability, essential for practical use across various settings. 17 Robotic exoskeletons have demonstrated efficacy in upper limb rehabilitation for stroke patients, improving muscle strength and coordination. This highlights the therapeutic potential of soft wearable robots in clinical environments (Rehmat et al., 2018). 18 Thalman et al. (2018) developed a soft elbow exosuit made of TPU that enhances bicep lifting capacity, significantly reducing muscle strain during repetitive tasks. This highlights its potential in labor-intensive industries. 19 Zhang et al. (2016) designed a soft wearable sleeve that improves joint mobility and reduces pain for patients with stiffness issues, broadening the application of soft wearable robots in managing chronic musculoskeletal conditions. 20 Zhao et al. (2022) introduced a novel interface based on soft skin sensors, enhancing the control and responsiveness of wearable exoskeletons. These innovations are crucial for improving user interaction and functionality. 21 Despite these advancements, several challenges persist in soft wearable robotics. These include balancing portability, comfort, and efficiency and developing advanced control strategies for seamless human-robot integration. Future research should focus on refining actuator technologies, enhancing material properties, and improving sensory feedback systems to create more effective and user-friendly wearable robots.13,14,16 The development of soft, wearable robotic exoskeletons marks a significant advancement in augmenting human capabilities and providing effective rehabilitation solutions. Ongoing innovation and interdisciplinary collaboration will be essential to overcoming current challenges and fully realizing the potential of these advanced assistive technologies.
In Industrial manufacturing settings, tasks such as repetitive lifting sustained overhead work, and prolonged static postures are major contributors to upper-limb Work-related Musculoskeletal Disorders (WMSDs).22,23 These tasks place excessive strain on the elbow joint over time. Although pneumatic elbow exoskeletons have been explored, few usability studies have evaluated how effectively these devices fit real-world manufacturing needs or reduce WMSDs. 22 Many existing designs employ multiple components and heavier materials, potentially limiting portability and comfort in repetitive, task-intensive environments. Our approach addresses these gaps by integrating a single-piece pneumatic actuator, lightweight neoprene, silicone materials, and a durable Onyx support plate to achieve controlled elbow bending. This combination enables simplified donning and improved comfort, allowing for prolonged use in settings where overhead and repetitive tasks are performed frequently. To benchmark our system against other soft wearable robotic elbow exoskeletons, we include a torque and usability comparison in a dedicated table, illustrating how our simplified design reduces complexity while delivering sufficient assistance. In this manner, our device targets specific manufacturing tasks that commonly lead to upper-limb injuries, pursuing the dual goals of mitigating injury risks and improving user comfort and efficiency. By focusing on portability, comfort, and minimal component requirements, our exoskeleton concept fills a critical niche among existing solutions, providing a platform for further development and validation in real-world industrial applications.
Materials and methods
Design and materials
(A) Isometric view of Actuator; (B) Isometric view of Base Plate; (C) Isometric view of Neoprene Layer. Isometric and Cross-sectional view of PASE. Dimensions and Weight Components of PASE.


Fabrication
The actuator’s fabrication process involved compression molding of XIAMETER® RTV-4234-T4 silicone. This design builds on the previous work of Erel et al. and Singh et al., where the fabrication process was conducted in two stages: the ridges were molded in the first stage, followed by the base in the second stage, allowing the creation of a cavity that enables uniform expansion of the actuator upon air inflation.24,27 The base plate, made of Onyx, was produced using 3D printing technology. Neoprene fabric was cut to the dimensions of the base plate, with holes precisely aligned for assembly. The silicone actuator, Onyx base plate, and neoprene fabric were sewn to complete the actuator assembly (Figures 3 and 4). Finite element analysis (FEA) was employed to refine and optimize the design. This analytical approach comprehensively evaluated the actuator under various operational scenarios, guiding adjustments to enhance force delivery and movement support. These simulations identified and addressed potential design limitations, ensuring the actuator was finely tuned for optimal functionality. PASE assembly Configuration: (A) silicone actuator; (B) Onyx base plate; (C) neoprene fabric contact layer. Multifaceted views of the inflated soft elbow Exoskeleton: (A) Isometric view; (B) Side view; (C) Rear view.

Pneumatic control box
The exoskeleton’s operation is managed by a control box (Figure 5) designed to regulate airflow and pressure precisely. This control box includes two solenoid valves, a two-station manifold for directing airflow, and a proportional valve mounted on a single-station manifold for accurate pressure adjustments. A pressure sensor provides real-time monitoring, while a microprocessor handles data processing and command execution. The system uses an In-house compressed air, with the initial pressure regulated from 50 PSI to 25 PSI. The working pressure is then further controlled to 18 PSI using feedback from the pressure sensor. Once the desired pressure is achieved, the system autonomously stops the air inflow to maintain safety and ensure optimal support. The control system was isolated from the user and manually inflated during the test trials to focus on evaluating the mechanical assistance provided by the exoskeleton, with its weight not being considered in the evaluation. Pneumatic control system of PASE.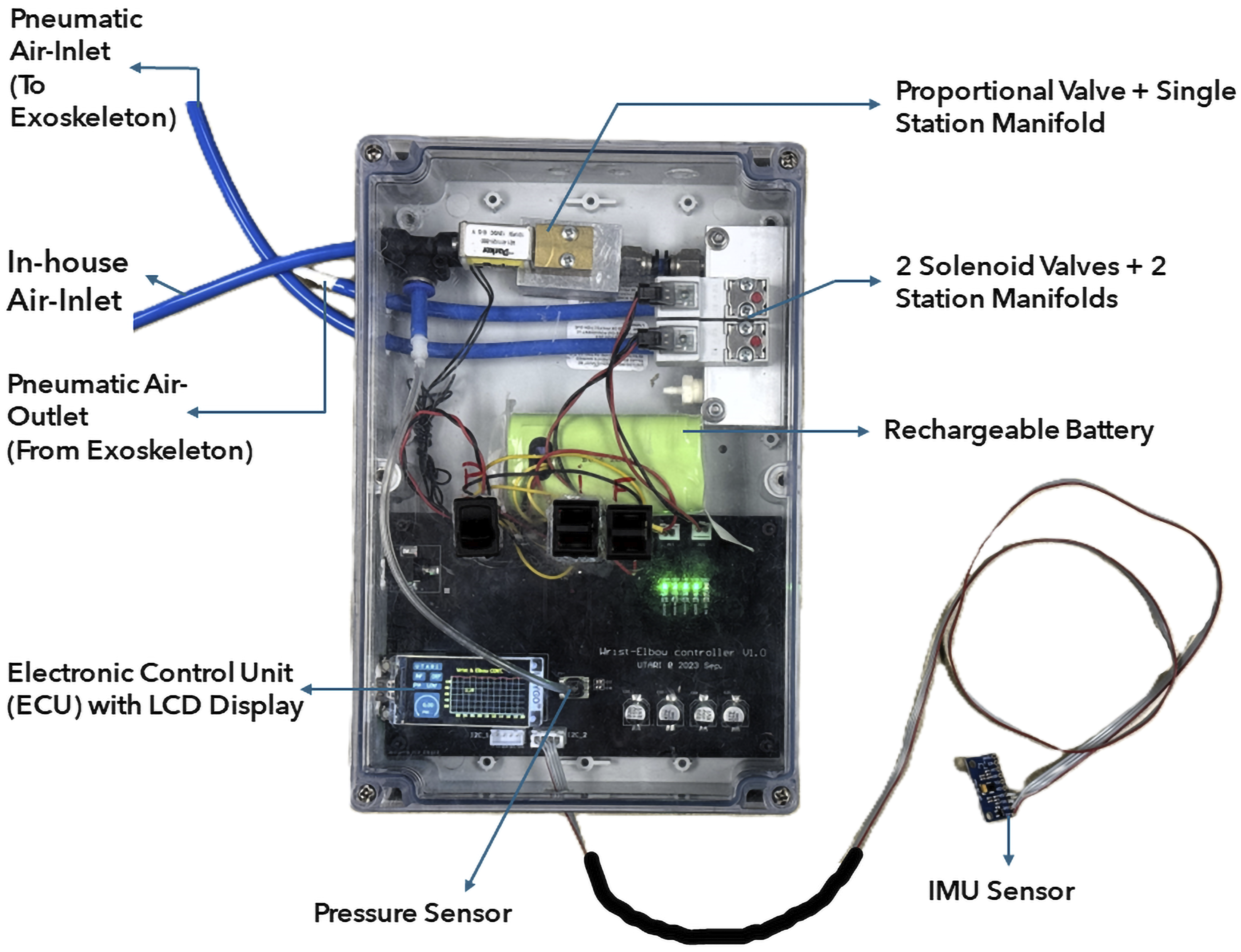
Mechanical testing
Torque test
An experimental setup (Figure 6) was developed to measure and characterize the torque generated by the exoskeleton. Torque measurements were taken at three angular positions (30, 60, and 90°) and three different pressures (15, 18, and 21 PSI). A load cell was mounted on the rotational axis of the exoskeleton, with a fixture at the endpoint applying perpendicular force to the load cell. A synthetic arm was created using a casting process incorporating 3D-printed bones and a revolute joint to replicate elbow movement. Alginate was used to cast the arm over the printed bones, forming a mold that produced the final silicone structure. The arm’s humeral segment (shoulder to elbow) measured 20 cm, and the forearm segment (elbow to fixture point) was 23 cm. The silicone arm weighs about 1.5 kg, which is low compared to a typical human arm. To minimize the effect of this weight, the wrist joint setup was mounted horizontally so that gravitational forces would not significantly influence the torque. Under these conditions, the arm’s mass did not substantially affect the torque data. We used a two-way ANOVA to examine the main effects of angle and pressure on torque, as well as their interaction. Experimental setup for Torque Evaluation.
Inflation time test
A similar setup measured the inflation time from 0 to 90° at varying pressures (20 and 25 PSI). The inflation speed was controlled by adjusting the electrical input to the solenoid, thereby regulating the airflow into the exoskeleton. Predefined modes (Low, Medium, and High) were established to vary the inflation speed. High mode corresponds to a fully open proportional valve, medium mode is half-open, and low mode restricts the valve opening to minimize airflow and inflation speed. This testing was crucial to accommodate different tasks and user needs, as not all scenarios require high-speed actuation.
Human subject testing
The human subject testing was aimed to evaluate the exoskeleton’s effectiveness in reducing muscle activation and perceived workload during various tasks. The study was approved by the
Participant demographics
The study included 19 participants, 14 males, and 5 females, reflecting the demographic availability during recruitment. The participant’s ages ranged from 18 to 45 years, with the majority (16 participants) falling within the 18-25 age bracket. They represented diverse ethnic backgrounds, including Hispanic or Latino, Asian or Pacific Islander, and White. The participants had different physical activity levels, varying from minimal to over 10 hours per week. All participants were free from musculoskeletal disorders and had no health conditions that would restrict physical activity, such as lifting a 10 lb weight. A pre-screening process also confirmed that none of the participants had known skin allergies or allergies to the gel used in the study.
Experimental protocol
Data collection involved three distinct tasks, each lasting 70 seconds and structured into five repetitions of 8-second tasks interspersed with 5-second rest periods. Audio cues via a beep were provided to participants at each interval to indicate the start of an action, with a longer beep signaling the end of the activity. The initial repetition was discarded to minimize the influence of participants relying on muscle strength over the exoskeleton assistance. This setup allowed for comparing muscle activation and perceived workload between activities performed with and without the exoskeleton. Tests were performed with the device worn in unpowered and powered modes to examine practical usage scenarios of intermittent assistance. The natural case was not included because our primary focus was to compare how external support modifies muscle activity relative to an identical physical setup.
Electromyography (EMG) data were collected using the BIOPAC MP36 system during these tasks. Disposable circular Ag/AgCl electrodes, approximately 35 mm in diameter, were used for signal acquisition. Electrodes were placed according to SENIAM guidelines: biceps electrodes were positioned between the medial acromion and fossa cubiti. In contrast, triceps electrodes were placed at the midpoint between the posterior crista of the acromion and the olecranon. 28 Reference electrodes were placed near the wrist for consistency. Data was sampled at 1000 Hz and analyzed using MATLAB. In the data analysis, raw surface EMG signals were cleaned by discarding initial segments to remove transient artifacts, then passed through a 4th-order Butterworth bandpass filter (50–200 Hz) to reduce noise. The filtered signals were rectified, and any outliers (based on a Z-score threshold) were replaced with NaNs and linearly interpolated. Each participant’s peak muscle activation was subsequently identified, and a 4-second window before and after that peak was extracted to compare assisted (exoskeleton) and unassisted conditions. This peak-aligned approach provided a focused window of maximum muscle demand, enabling the calculation of percent reductions in EMG amplitude when exoskeleton assistance was applied. 29
Muscle activation testing for different tasks
The muscle activation testing involved three simulated occupational tasks designed to assess the exoskeleton’s impact on muscle activity under static and dynamic conditions. Static tasks involve controlled, isolated movements focusing on specific muscle groups with minimal variation in movement patterns. On the other hand, Dynamic tasks involve more complex, multidirectional movements that engage multiple muscle groups and require coordination and adaptability. Each task was tested under assisted conditions, where the exoskeleton provided support, and unassisted conditions, where participants performed the tasks without the exoskeleton’s aid. A constant pressure setting was used during task-based experiments, providing steady torque output for straightforward gravity support without active torque modulation. The order of assisted and unassisted trials was not randomized to maintain consistent conditions for each participant. Electromyography (EMG) was used to measure muscle activation in each scenario. The tasks included: • • • Illustration of the evaluated tasks in the study: Task 1 - Weightlifting (A: Pre-lift, B: Post-lift); Task 2 - assembly with basic tools (C: Pre-lift, D: Post-lift); Task 3 - assembly with power tools (E: Pre-lift, F: Post-lift).

These tasks were selected to replicate typical manual material handling activities in manufacturing environments, focusing on repeated or sustained upper-limb movements. They were designed to evaluate the exoskeleton’s effectiveness in reducing muscle strain and perceived workload under realistic conditions. We calculated the relative difference in EMG amplitude (i.e., percentage change) for each participant during the “Support On” and “Support Off” conditions in the human subject tests.
Muscle activation comparison across different weights
A separate test was conducted to assess the exoskeleton’s performance further. A single participant lifted weights of 3, 5, 8, and 10 lbs. Based on preliminary testing, a pressure of 15 PSI was selected to ensure sufficient assistance and maintain user comfort. This test provided insights into how the exoskeleton handles varying loads and its effectiveness in reducing muscle activation across different weights.
Assessment of mental and perceived load
Two assessment tools were employed to evaluate the cognitive and physical workload and the user experience: the NASA Task Load Index (NASA-TLX) and a User Perception Survey.
NASA-TLX
The NASA-TLX survey was administered post-activity to gauge the participants’ perceived workload. This subjective workload assessment tool measures six dimensions: Mental Demand, Physical Demand, Temporal Demand, Performance, Effort, and Frustration. Participants rated each dimension on a scale from “Very Low” to “Very High”. 30 This comprehensive evaluation provided insights into the cognitive and physical demands placed on participants during the tasks with and without the exoskeleton. NASA-TLX dimensions are initially scored on a 0–20 range and later scaled to 0–100, where lower values imply reduced workload and higher values indicate greater perceived demand. The scores for each dimension were recorded and analyzed to understand the overall workload and identify areas where the exoskeleton may reduce strain. We will conduct pairwise t-tests to compare assisted and unassisted conditions across the three tasks.
User perception survey
After completing the tasks, participants were asked to complete a user perception survey. This survey assessed the exoskeleton’s utility, ease of use, comfort, and potential for extended use. The survey included the following items: • • • •
Additionally, an open-ended question allowed participants to provide comments or suggestions for improving the design of the exoskeleton to enhance safety and comfort. This qualitative feedback was crucial for understanding user experiences and identifying areas for future development.
Results
Torque test
The torque test results (Figure 8) demonstrate that the exoskeleton’s torque output increases with higher pressures (15, 18, and 21 PSI) and varies at angles of 30°, 60°, and 90°. At 15 PSI, the measured torque was 1.93 Nm, 1.53 Nm, and 1.10 Nm across the three angles. Increasing the pressure to 18 PSI yielded 3.15 Nm, 1.90 Nm, and 1.45 Nm, while at 21 PSI, the values rose to 4.39 Nm, 2.62 Nm, and 2.00 Nm. These observations confirm that higher pressures produce higher torque. To determine the significance of these differences, we used a linear regression model that included angle, PSI, and their interaction. This model accounted for 95.7% of the variance in torque ( Torque Output versus Angle for Different Pressures.
Inflation time test
The inflation time test results in Figure 9 demonstrate the time required to inflate the exoskeleton from 0 to 90° at different pressures and speed modes. At 20 PSI, the low mode took 5.26 seconds, the medium mode was 2.75 seconds, and the high mode was 0.24 seconds. When the pressure was increased to 25 PSI, the inflation times were slightly reduced to 4.99 seconds, 2.605 seconds, and 0.22 seconds for the low, medium, and high modes, respectively. These findings highlight the ability to achieve total inflation in as little as 0.22 seconds, indicating rapid actuation speed and efficiency. Grouped bar chart of inflation time by mode and pressure.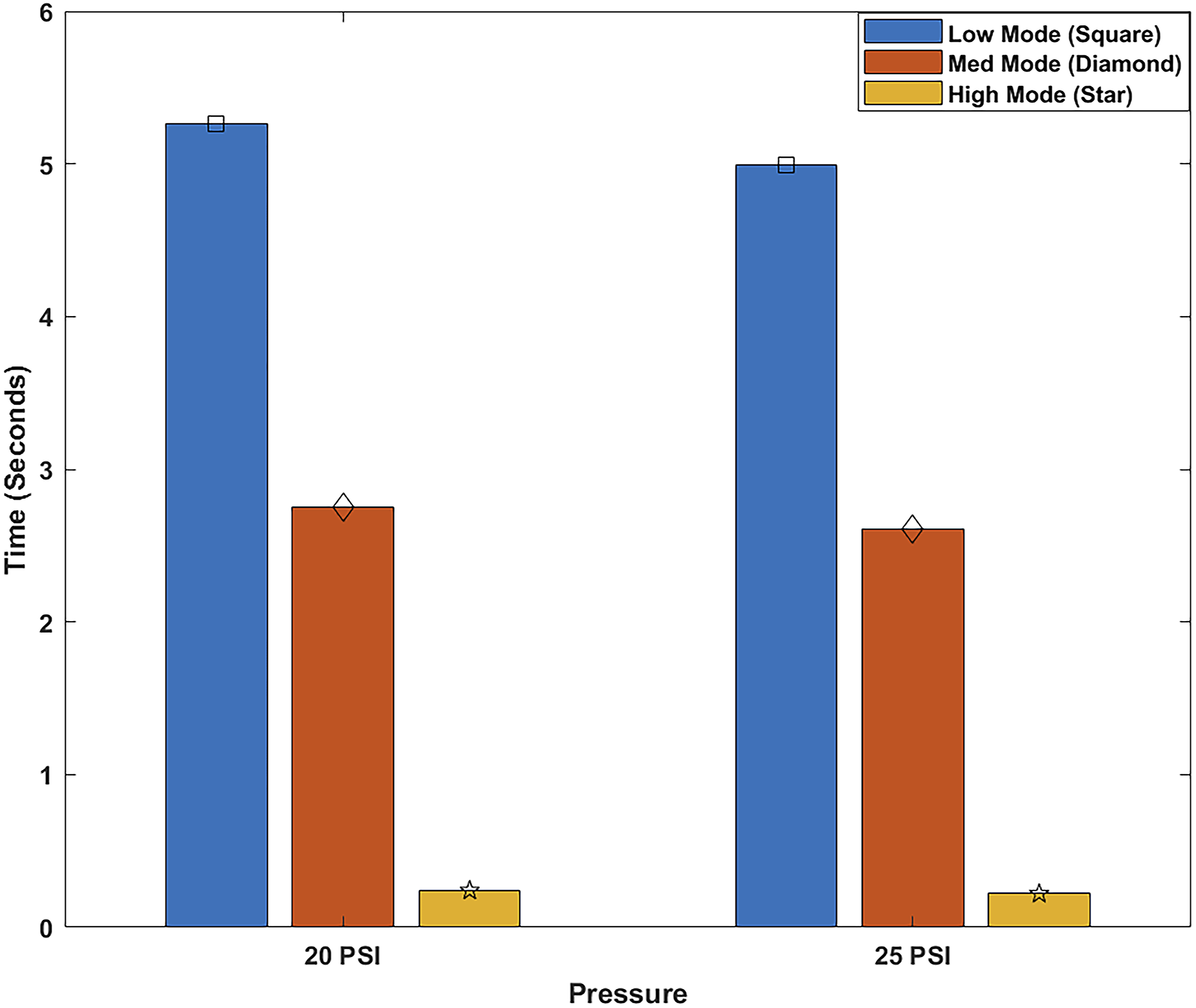
Muscle activation testing
Muscle Activation Reduction Across Tasks for Biceps and Triceps.


Task-wise peak muscle activity comparison - biceps and triceps.
Muscle activation comparison across different weights
Muscle Activation Reduction Across Different Weights.

Assessment of mental and perceived load
NASA-TLX
Participants completed the NASA-TLX in both “Support On” and “Support Off” conditions to assess the perceived workload. Across all tasks, average NASA-TLX scores were consistently lower with exoskeleton support. In Task 1, the assisted and unassisted means were Aggregate NASA-TLX Workload Scores by Task (Standard Error) - Lower is better.
User perception survey
The user perception survey results evaluated the exoskeleton’s utility, ease of use, and comfort. In Task 1, the mean scores for usefulness, ease of use, and comfort were 5.17 (±0.23), 4.61 (±0.34), and 4.11 (±0.40), respectively. For Task 2, the scores were higher, with 5.89 (±0.24) for usefulness, 4.83 (±0.26) for ease of use, and 4.44 (±0.30) for comfort. Task 3 recorded mean scores of 5.28 (±0.33) for usefulness, 5.06 (±0.32) for ease of use, and 4.33 (±0.35) for comfort (Figure 12). These results reflect a generally positive user experience, highlighting the exoskeleton’s perceived effectiveness and comfort across different tasks. Aggregate User Perception Scores by Task (Standard Error) - Higher is better.
These findings highlight the exoskeleton’s capacity to reduce muscle activation and perceived workload during various tasks and weights, underscoring its potential to mitigate work-related musculoskeletal strain.
Discussion
The results of this study offer a thorough evaluation of the soft pneumatic elbow exoskeleton’s ability to reduce muscle activation, decrease perceived workload, and enhance user comfort during various tasks. This section explores these findings, highlighting their implications for exoskeleton design and application in occupational settings.
Performance evaluation
Torque testing demonstrated that the exoskeleton generates substantial torque across different pressures and angular positions. At 21 PSI, the exoskeleton achieved a maximum torque of 4.38,552 Nm at 30°, indicating its capability to provide significant assistance during elbow flexion tasks, such as lifting and holding objects. The adjustable pressure feature enhances the exoskeleton’s versatility, allowing customization for specific task requirements. The inflation time test results further emphasize this adaptability, showing varying inflation times across low, medium, and high modes (from 5.26 seconds at low mode and 20 PSI to 0.22 seconds at high mode and 25 PSI). This flexibility is advantageous for tasks demanding rapid actuation, such as assembly line work or heavy items.
Comparison of performance against other exoskeletons
Torque performance comparison against other soft exoskeletons.

User benefits
Muscle activation tests indicated a significant reduction in muscle strain when using the exoskeleton. On average, biceps and triceps activation decreased by 22.36% and 18.19%, respectively, during Task 1. These reductions were consistent across various tasks and weights, showcasing the exoskeleton’s efficacy in mitigating muscle load. Such reductions prevent work-related musculoskeletal disorders (WMSDs) familiar with repetitive or forceful motion tasks. The decreased muscle activation also implies that users can perform tasks with less effort, potentially boosting productivity and reducing fatigue. This is particularly important for tasks requiring sustained muscle activity, as the exoskeleton helps maintain performance levels over extended periods.
Analysis of negative values in muscle activation testing (task 3)
During Task 3, some participants exhibited negative values in muscle activation reduction, which could be attributed to several factors. One possible reason is the tightness of the straps, which may have restricted natural arm movement and affected muscle performance. The insufficient vibration dampening of the exoskeleton may have led to heightened vibrations, disrupting EMG signals, and potentially creating an impression of increased muscle activation. Variations in fit and user compatibility could have also affected consistent support. Further investigation is needed to improve performance and user experience in high-vibration tasks.
Comfort and user experience
The NASA-TLX scores indicate a significant reduction in perceived workload across all tasks when using the exoskeleton. Assisted conditions consistently showed lower mean scores than unassisted conditions, with reductions ranging from approximately 7 to 9 points. This suggests that the exoskeleton reduces physical strain and lessens cognitive and temporal demands, making tasks less taxing for users. User perception scores further highlight the exoskeleton’s positive impact on user experience. High usefulness, ease of use, and comfort scores suggest that participants found the exoskeleton effective and user-friendly. Comfort scores, while slightly lower than those for usefulness and ease of use, still indicate a generally positive user experience. This is crucial for ensuring compliance and long-term use in real-world settings. Feedback from participants pointed out areas for improvement, such as enhancing fit and reducing weight. These insights are valuable for future design enhancements to increase user comfort and satisfaction. Ensuring the exoskeleton is comfortable for prolonged use is essential for practical application, as discomfort can deter consistent use.
Study limitations
Several limitations were noted in this study. The participant group consisted of young adults aged 18 to 26 and was primarily male, potentially limiting the generalizability of the results to a broader age range of worker populations and genders. In addition, the study only examined short-term effects, leaving long-term usage impacts unexplored. Moreover, all tasks were conducted in a controlled laboratory setting, which may not fully reflect real-world conditions, such as harsh and rough factory environments. Additional research is necessary to assess these findings in actual work environments. One other possible limitation that might arise from our study is the omission of MVC measurements. We employed a within-subject design, and each participant performed tasks with and without exoskeleton assistance, allowing direct comparisons of relative reductions in muscle activation. As each participant served as their own control, individual differences in muscle capacity did not significantly impact our primary outcome.
Implications for exoskeleton design
The findings from this study have significant implications for exoskeleton design and application. Adjusting torque and inflation speed provides flexibility, allowing the exoskeleton to be customized for different tasks and user preferences. This adaptability is a crucial advantage, enabling the exoskeleton to be used in various occupational settings. Reducing muscle activation and perceived workload highlights the exoskeleton’s potential to prevent WMSDs and improve occupational safety. Lowering physical and cognitive task demands can enhance worker productivity and well-being. Future research should optimize the exoskeleton’s design based on user feedback and expand its applicability to other joints and movements. Additionally, long-term studies are needed to evaluate the sustained benefits and challenges of using the exoskeleton in real-world settings.
Conclusion
This study demonstrates the effectiveness of a Pneumatically Actuated Soft Elbow Exoskeleton (PASE) in reducing muscle activity and perceived workload during various tasks. Integrating human joint mechanics with a single-piece pneumatic structure, the exoskeleton provides significant assistance in elbow flexion, which is crucial for lifting and holding the elbow at a flex position. Mechanical testing revealed that PASE can generate substantial torque, with a maximum output of 4.39 Nm at 21 PSI. The inflation time tests further highlighted its ability to achieve total inflation in as little as 0.22 seconds, indicating precise control over actuation speed and efficiency. These capabilities ensure the exoskeleton can adapt to various task requirements, enhancing its versatility and practical applicability. Human subject testing indicated consistent reductions in muscle activation, with average decreases of 22.36% in the biceps and 18.19% in the triceps at 18 PSI applied pressure to the actuator. The NASA-TLX and user perception surveys confirmed that the exoskeleton significantly lowers perceived workload, with high usefulness, ease of use, and comfort scores, underscoring its potential for long-term adoption in real-world settings. Despite these promising results, further research is needed to address the study’s limitations, including the short-term nature of the testing and the controlled laboratory environment. Future studies should focus on evaluating the long-term impacts of PASE in diverse occupational settings and optimizing its design based on user feedback to enhance comfort and usability. Further design refinements will target improved portability and integrated control strategies for a broader range of tasks. In conclusion, the PASE exoskeleton represents a significant advancement in wearable robotic technology, offering a viable solution for reducing work-related musculoskeletal disorders by providing effective assistance during repetitive tasks. The findings from this study contribute valuable insights into the practical applications and benefits of soft wearable robotic exoskeletons, paving the way for further innovation in this field.
Footnotes
Acknowledgements
We want to thank the Industrial, Manufacturing, and Systems Engineering Department at The University of Texas at Arlington and the Biomedical Technologies Division at The University of Texas at Arlington Research Institute for their support and assistance in this research. We also acknowledge the UTA IRB for their guidance and approval (The University of Texas at Arlington’s Federal wide Assurance (FWA) number is FWA00001762, expiring November 10, 2027).
Ethical Statement
Author contributions
Conceptualization: E.S., V.E., M.B.J.W., M.R.; Methodology: E.S., V.E., M.B.J.W., M.R.; Validation: E.S., V.E.; Data curation, E.S., V.E.; Writing - Original Draft Preparation, E.S.; Writing - Review and Editing, E.S., V.E., A.N., M.B.J.W., M.R.; Supervision, V.E., M.B.J.W., M.R.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the UTA Interdisciplinary Research Program, which enabled collaboration between the Industrial, Manufacturing, and Systems Engineering Department at the University of Texas at Arlington and the Biomedical Technologies Division at the University of Texas at Arlington Research Institute.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.