
Abstract
This study introduces a cost-effective, multi-channel electromyography (EMG) sensor that is capable of simultaneously acquiring electrical activity from up to four muscles. Given the susceptibility of EMG signals to noise sources like power line interference (PLI), muscle cross-talk, and skin movement artifacts, the proposed sensor is designed to enhance EMG signal fidelity. It employs fine-tuned analog filters and a Driven Right Leg (DRL) circuit, which attenuates PLI by applying an inverted and amplified common-mode voltage back into the subject’s body. The sensor uses electronic components, including AD620 instrumentation and TL074 operational amplifiers and an SMD PJ-131 audio jack. It features four independent acquisition channels, processing raw input with low-pass and high-pass filters to form a band-pass filter for signals in the 20–440 Hz, where muscle activity typically occurs. The two-layer PCB, powered by two 9-V batteries, achieves an average SNR of 23 dB. Experimental results confirm its effectiveness in upper limb movements, with significant noise suppression and clear muscle state differentiation. The DRL reference circuit improves SNR to 23 dB, compared to 20 dB with the traditional ground reference. The proposed EMG system costs around 10 euros in components, with lower PCB manufacturing costs at scale, offering a cost-effective alternative.
Introduction
Advancements in science and technology have led to increased awareness of health monitoring, driving the development of medical electronic devices and instrumentation. Among these, Electromyography (EMG) is a key biomedical technique used to measure muscle response to electrical nerve stimulation. 1 Traditional methods for monitoring and assessing muscle activity during clinical evaluations or rehabilitation rely heavily on visual observation, which is often inaccurate and places additional strain on clinicians. EMG sensors offer a more efficient alternative by automating these tasks and providing objective, quantifiable data. Additionally, EMG signals can serve as input for human-machine interaction systems, such as rehabilitation mechanisms and exoskeleton robots, since they provide not only the real-time state of the measured muscle, but also the valuable insights into muscle fatigue levels and user recovery process.
Despite its advantages, EMG acquisition faces several challenges. The signals are highly susceptible to various types of noise, including internal noise, motion artifacts caused by skin movement, cross-talk from adjacent muscles, interference from electronic devices, and power-line interference (PLI). To mitigate these issues, commercial EMG devices incorporate sophisticated noise reduction techniques, but these solutions are often expensive. For example, the Shimmer EMG sensor unit, which provides only two channels, costs approximately 538 euros, excluding shipping. Given these constraints, developing a low-cost, customizable, and high-accuracy EMG acquisition system is essential to expand its applicability in control systems and human-machine interfaces.
This research focuses on the design of an advanced, multi-channel, cost-effective EMG acquisition system using commonly available electronic components. Such a system would significantly reduce the cost of technologies like exoskeletons, active prosthetic limbs, and smart wheelchairs. Furthermore, improving EMG signal quality enhances both signal accuracy and control precision while also refining training datasets, which are essential for muscle state classification models and joint angle regression models. The main technical contributions of this study can be highlighted as follows:
(1) A new design of EMG is proposed based on the combination of advanced active filter circuits to enhance performance.
(2) Parameters of the EMG are analyzed and specific integrated circuits (ICs) are recommended to achieve a cost-effective bill-of-material (BOM) with high performance.
(3) The investigation of upper-limb movement using the proposed EMG sensor.
The rest of this article is organized as follows: section “Related works” presents a discussion of the related works; in section “Proposed EMG sensor design,” the proposed EMG design and its manufacture are presented and analyzed; section “Application of EMG sensor for upper body and discussions” discusses the application of EMG sensor for upper body; as well as the limitations and future works; and finally, section “Conclusion” concludes this research.
Related works
There are different types of EMG acquisition systems from prototypes to commercial products that have been invented and developed throughout the years. Moreover, plenty of EMG-based algorithms were developed for human motion recognition. EMG acquisition systems can be classified based on the methodology of transmitting data to the computer or monitor devices. As a result, there are two types of EMG acquisition systems including wireless connections and cable connections. While wireless systems employ wireless modules such as Lora, ZigBee, Bluetooth-low-energy (BLE), and Wi-fi to transmit digitalized data from an EMG sensor to computer or smartphone, cable connection systems send data directly to a computer through serial communication such as RS-232, SPI, I2C, or Universal Serial Bus (USB) communication. Both wired and wireless systems have their own advantages and disadvantages. The wireless systems could utilize Wi-fi module as the transmission protocol in a low-cost wireless two-channel EMG acquisition system that was developed in Yang et al. 2 Alternatively, Ishak et al. propose a system that features X-Bee module to wirelessly communicate EMG signals to the computer as GUI captured wireless EMG signals. 3 Furthermore, Wu et al. develop a single-channel ultra-low-power EMG acquisition system consisting of a preamplifier, an active multiple feedback filter with cut-off frequency of 500 Hz, and a wireless communication using BLE module that transmitted the data to the smartphone was used as the wireless Soc module. 4 Although these systems show benefits in terms of compact design, convenience, and flexibility, largely due to the elimination of tangled cables, there are some drawbacks such as a limitation in the number of channels that can simultaneously collect data, or the wireless module is not enough possibility to realize the high-sampling rate. Nevertheless, the engineering and prototyping costs of the novel wireless systems have been hidden from the public. Conversely, Tariquzzaman et al. practically designed and implemented a wired low-cost three-channel EMG acquisition system using INA118 instrumentation for the pre-amplification stage, TL072 for rectification and smoothing. In the digitalization stage, a 10-bit analog to digital converter of Arduino UNO was used. The proposed system costs around 40 USD. 5 Another low-cost, low-power, and highly portable EMG acquisition system was proposed in Zhou et al. 6 The signals collected from one channel send to the ADC of microcontroller for post processing. In 2019, Fortune et al., publish their research about low-cost active electromyography. 7 In this study, INA128U was the selected instrumentation amplifier due to the high common mode reject ratio (CMRR) and low noise. The signal after passing the bandpass filter (21.2–430 Hz) was digitized by a 24-bit ADC (AD7768) at a sampling frequency of 1000 Hz. Each channel costs approximately 112 USD. 7 In general, wired EMG acquisition systems could be low-cost, and have a high sample rate, their portability is limited due to multiple cable connections. In recent years, a number of companies in over the world have been pioneers to design and develop EMG acquisition systems such as Delsys, Shimmer, Laxtha Inc, and others. However, the common point of these companies is that the price of their EMG acquisition products is quite expensive. For instance, a module containing two channels of Shimmer costs more than 500 euros excluding the shipping fee, as shown in the website. Concerning Ergonomics field, there have been numerous studies on the possibilities of EMG: work at desktop table, and impact on neck and shoulder muscles,8–10 production line workstation11,12; workspace optimization13,14; lifting tasks.15–17 Moreover, the number of channels in EMG acquisition plays an important role in specific applications in Rodríguez-Tapia et al. 18 In particular, muscular activation could be monitored by using a single channel, while silent speech recognition requires at least three channels. With four to eight channels, the EMG acquisition could aid in the control of exoskeletons, electrical wheelchairs, and handwriting recognition. To manage the prosthetic device smoothly, more than eight channels of EMG acquisition are necessary.
However, some may argue that EMG signals are not ideal for movement recognition due to their susceptibility to noise and their variability between individuals. The same movement performed by the same person at different joint angles can produce slightly different EMG signals, complicating the development of a comprehensive training dataset. As a result, Inertial Measurement Unit (IMU) sensors have been explored as inputs for many exoskeletons and prosthetic limbs in Bardi et al. 19 Despite these challenges, EMG signals remain preferable in certain situations. They are particularly useful for users who have lost a limb, where there is no suitable location to attach an IMU sensor. Furthermore, EMG signals can provide valuable insights into patient recovery in the context of rehabilitation robotics. In general, exoskeleton robotics represent a significant advancement in the field of rehabilitation and human augmentation, offering unparalleled support for individuals to execute tasks that surpass human physical limitations. These tasks include the lifting of substantial weights and the execution of strenuous activities over extended duration without inducing joint fatigue. The design of exoskeletons can be categorized into two primary types: those composed of rigid links coupled with motor-driven joints, and those that are intricate assemblies of soft robotic wearable devices.19,20 The control mechanisms employed by exoskeleton robotics are diverse, encompassing various input methods. These systems may integrate sensor technologies such as EMG and electroencephalography (EEG) to capture physiological signals within the human body, or they may measure external factors like ground pressure in lower-limb exoskeletons in Qiu et al. 21 Additionally, force/torque sensors are utilized to discern motion intentions in Yu et al. 22 There have been explorations into voice command control for exoskeletons; however, this approach is impractical in industrial settings due to ambient noise interference and the potential for misinterpretation of commands, which could result in severe accidents in Kim et al. 23 Other control strategies incorporate video cameras to identify targets for interaction; however, their utility is constrained by the finite number of pre-programmed trajectories, rendering them only suitable for neuromuscular rehabilitation purposes in Oguntosin et al. 24 An alternative control method involves the analysis of brain activity, which proves beneficial for enabling paralyzed patients to perform tasks that would otherwise be unattainable, such as standing and walking. The MINDWALKER exoskeleton employs an EEG sensor-equipped cap to monitor brain activity in Gancet et al. 25 Similarly, the powered exoskeleton glove developed by the Department of Neurological Surgery at Washington University incorporates a Brain-Computer Interface (BCI), yet it necessitates further testing to confirm its efficacy in Bundy et al. 26 Nonetheless, the presence of facial muscle-generated noise complicates the acquisition of accurate brain activity measurements without invasive procedures. In contrast, EMG sensors measure the electrical activity produced by muscles, which is directly related to the force and movement generated by these muscles. EMG-based control can also provide a form of biofeedback, helping users to learn how to better control their muscle activation patterns. This can be particularly beneficial in rehabilitation settings, where the goal is often to retrain impaired motor functions in Bardi et al. 19 Furthermore, studies have shown that EMG-based control strategies can detect the onset of movement with high sensitivity and specificity, and the low computational load makes them suitable for real-time applications in Bardi et al. 19
There are invasive and non-invasive EMG sensors, but the non-invasive surface EMG electrodes are commonly used due to the concerns over sanitation and user comfort. However, their placement on the skin’s surface makes them susceptible to cross-talk from adjacent muscles in Kuiken et al. 27 There are two main types of EMG electrodes: gel-based and dry. Gel-based electrodes establish a chemical interface between the skin and the electrode, consisting of a gelled electrolyte in Merletti et al. 28 Oxidation and reduction reactions at the metal electrode junction necessitate the use of metals with high oxidizing capacity, such as gold, silver, stainless steel, and their alloys. Silver-silver chloride (Ag-AgCl) is the most commonly employed metal in these electrodes for surface EMG applications, representing over 80% of such uses. Despite their popularity due to their lightweight nature, disposable gel-based electrodes require meticulous skin preparation, including hair removal and alcohol cleansing, to ensure optimal signal quality. In contrast, dry EMG electrodes adhere directly to the skin without a gel layer, allowing for multiple uses in Yang et al. 2 However, due to their greater weight (typically over 20 g compared to less than 1 g for surface electrodes), careful attention must be given to the electrode-skin contact to avoid artificial movement noise. However, EMG signals cannot be used directly and require several conditioning stages to become usable. These signals are characterized by small amplitudes (50–200 µV), making them difficult to analyze. Additionally, the frequency range of EMG signals spans from 20 to 500 Hz, and they are highly susceptible to noise, including cross-talk, skin movement artifacts, and electromagnetic interference. Despite these challenges, EMG signals are consistent with the same muscle movements, making them suitable as control inputs once properly processed and de-noised.
To address these challenges, various methods for denoising EMG signals have been developed, ranging from analog to digital techniques. Commonly, a band-pass filter is used to limit the capturing range, and notch filters are employed to eliminate the 50 Hz power-line interference (PLI) common in improperly grounded electronic equipment. Given the small amplitude, limited frequency range, and susceptibility to noise, it is essential to amplify, band-pass filter, and de-noise the EMG signal. Building on this foundation, this research proposes an EMG acquisition system with four channels, beginning with a bipolar electrode configuration and culminating in the presentation and storage of EMG signals on a PC. The second, third, and fourth channels follow identical procedures as the first. Two reference electrode configuration options are provided: one uses the driven right leg (DRL) circuit, and the other employs the same ground as the EMG acquisition system. As previously mentioned, differential amplification or pre-amplification is crucial in the EMG acquisition process. By inputting both positive and negative electrodes into an instrumentation amplifier, which collects the same amount of noise, the differential amplifier can subtract this noise, effectively eliminating it.
Previous studies have applied various band-pass filters to EMG signals. For example, a band-pass filter (20–500 Hz) was used in a low-cost wireless multichannel surface EMG acquisition system in Yang et al., 2 and Meltzner et al. 29 employed a fourth-order band-pass filter (20–450 Hz). According to statistical analyses, a band-pass filter with a range of 20–500 Hz is prevalent in the filtering stage in Rodríguez-Tapia et al. 18 Therefore, in the proposed system, a band-pass filter with cut-off frequencies at 20–440 Hz was designed and implemented. While removing power line interference (PLI) is essential, the proposed circuit lacks a notch filter. Notch filters can eliminate significant adjacent frequencies within the primary range of the EMG signal (0–500 Hz). However, they fail to attenuate multiple harmonic noises from the power supply and can vary with the power supply frequency across different countries in Khan et al. 30 To overcome these challenges, this study adopts a band-pass filter with a 20–440 Hz range and employs digital filtering techniques as needed.
In particular, this study focuses on the design of a four-channel EMG acquisition system featuring a DRL reference configuration for noise mitigation, while also incorporating a traditional ground reference for comparison. The selection between configurations is made easily interchangeable using jumper headers. Additionally, the study emphasizes cost-effectiveness and component availability, ensuring that all parts can be sourced from common electronic vendors.
To enhance signal quality, the system employs differential amplification and bandpass filter to effectively suppress noise. By advancing EMG signal processing, this research aims to develop a sensor unit suitable for human-machine interaction interfaces, particularly in applications such as exoskeletons, active prosthetic limbs, and smart wheelchairs. Additionally, if used for movement classification or joint angle regression model training, the proposed system enhances the quality of training datasets, thus contributing to more accurate models and improved rehabilitation outcomes.
Proposed EMG sensor design
EMG signal processing principle
In design a new EMG sensor, the progress for control from the signals of the EMG should be remarked with the flow as shown in Figure 1. The noise of the EMG sensor must be filtered in the modulus of pre-processing to decrease the magnitude for choosing the best data before entering the next modules. It is noted that the EMG’s signal has relation to the bio-signal processing, and this makes a noise chains including the elasticity of the skin, the blood flow networks, the operation of muscle groups. Hence, the pre-processing is as a main pillar in determination of the quality of the data. The components of the pre-processing module are shown in Figure 2. The pre-amplification section is as an instrumentation amplifier (in-amp in short), which is used as a differential amplifier in bipolar electrode configuration. This element is applied due to its low DC offset, high common-mode rejection ratio (CMMR in short), large bandwidth, and input impedance. It is remarked that the quality of EMG signals can be improved with high SNR and low baseline noise. The output data of the pre-amplification is continuously used for the filtering section. In this section, the bandpass-filter uses to collect valuable signals under two types such as active and passive models. The active filter with its advantages in low output impedance and high input impedance is normally use for the bandpass-filter. It can modify the sensitivity of the frequency response by setting the quality factor (Q factor) of 0.707 to obtain the best flattening impact. The filtered data is input of the main amplifier before applying to ADC module. The selection of gain for the amplifier depends on the specific application and group of muscle. The gain in EMG sensor should be chosen in range from 500 to 2000. The ADC resolution influences the ability of EMG acquisition. The muscular activation could be accomplished with an 8-bit ADC, whereas an electric powered wheelchair requires a 10-bit ADC to function properly. It is noteworthy that the applications concerning pathology detection, exoskeleton, prosthetic control, and handwriting recognition require ADC resolutions ranging from 12-bit to 24-bit.

The main progress to classify the EMG signals.

Components of the pre-processing module.
EMG sensor design
The architecture of an EMG sensor is the most important part of the design. The references of EMG sensor were not show an explicit form to give a general view as an instruction for any developer in improving performance. The signal processing components of the proposed EMG sensor are shown in Figure 1. In this block diagram, the system begins with bipolar electrode configuration and ends with the presentation and storage of EMG signals in a PC. The proposed model includes six modulus such as differential amplifier, driven light leg (DRL), high-pass filter, low-pass filter, main amplifier, and ADC, as shown in Figure 1. The second, third, and fourth channels of the system will follow the identical procedures as the first channel.
There are two reference electrode configuration options. One is that the reference electrodes takes a signal from the DRL circuit, whereas the other is the same ground of the EMG acquisition system. The specification and circuit for EMG elements in Figure 3 are depicted in Figure 4. The differential amplification is shown in Figure 4(a), which can be chosen based on the type of INA128, INA106, INA121, AD620, and AD8295 instrumentation amplifiers. In this study, the AD620 type is chosen based on its popular application in any design and the commercial market. The AD620 obtains high CMRR with minimum value 110 dB at gain of 100, high input impedance 10 kΩ, and low noise


The proposed EMG signal processing system.
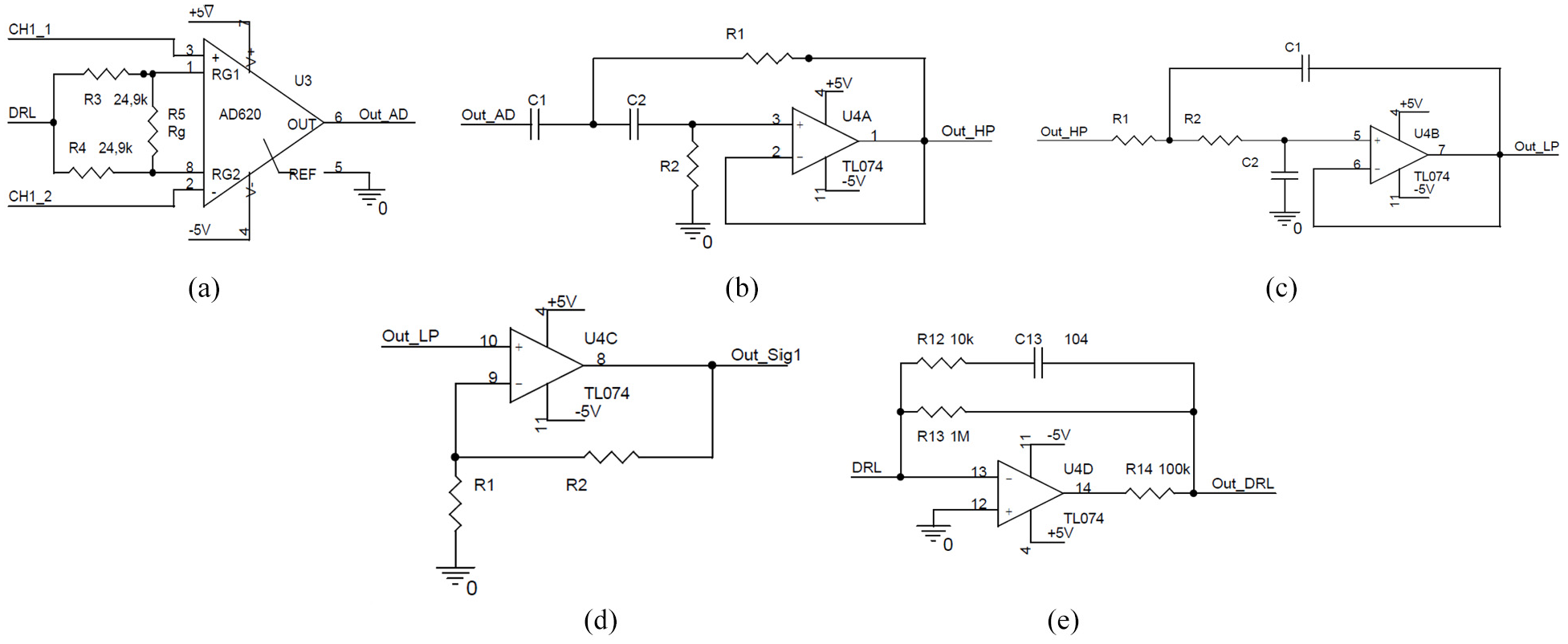
EMG elements and its specifications: (a) Differential amplifier circuit utilizing the AD620 instrumentation amplifier, chosen for its high CMRR, high input impedance, low noise performance, and widely used in precision applications. The differential amplification gain is
The value of equation (1) can be rounded off before choosing the final value of



Using equations (2)–(4), the chosen optimal values of the high-pass filter are 20 Hz for the frequency, 0.7 for Q factor, 56



Using equations (5)–(7), the chosen optimal values of the low-pass filter are 440 Hz for the frequency, 0.708 for Q factor, 33
The main amplification unit is shown in Figure 4(d) with the main gain function as follows:

Using the equation (8), the gain value and its resistances
The DRL unit is shown in Figure 4(e) which uses for attenuate PLI noise by applying inversed and amplified common-mode voltage back into the subject’s body through the reference electrode. This feedback mechanism effectively reduces common-mode interference, enhancing signal quality. A critical factor in the performance of the DRL circuit is the ratio of resistors
The ADC resolution influences the ability of EMG acquisition to execute specific applications. The muscular activation monitoring could be accomplished with 8-bit ADC. It is noted that an electric powered wheelchair requires a 10-bit ADC to function properly. It is remarked that the application concerning exoskeleton, prosthetic control requires ADC resolution ranging from 12-bit to 24-bit. Another important design related to the power supply of the EMG board is presented in Figure 5. It includes two regulator ICs, LM7805 and LM7905 to produce voltage 5 and −5 V, respectively. It is noted that two 9 V batteries are used as the main power supply.

Power supply design of the EMG board.
Assembled EMG sensor board
From the above principles, the EMG acquisition board is fabricated and assembled. The designed PCB on Orcard’s platform is shown in Figure 6.

The designed PCB on Orcad’s platform (a, b) and the prototype of the proposed EMG acquisition board (c): (a) top layer with silkscreen layer and (b) bottom layer.
The EMG acquisition board is designed and implemented as a Printed Circuit Board (PCB). The board was designed in Orcad and consisted of two layers (top and bottom), as shown in Figure 6(a) and (b). The total dimensions of the board is 10 cm × 7 cm (length × width). All ICs and electronic components are placed on the top layer, most of them were surface mount devices (SMD components) including AD620, TL074, resistors, and capacitors. The developed board uses SMD PJ-131 audio jack as a bridge between electrodes and the preamplifier. There are three terminals in total: one input terminal to connect to batteries, one output terminal to transfer signal from four channels to the ADC device, and one to collect signal of each phases (pre-amplification, high-pass filter, low-pass filter, main amplification) from channel 1 to further analysis. The prototype of the designed EMG acquisition board is depicted in Figure 6(c). The price of all components in this prototype of EMG acquisition is about 10.85 USD, which is less than the price of the commercial EMG. This price is acceptable for all development of exoskeleton featuring EMG sensors with the lowest cost.
Application of EMG sensor for upper body and discussions
Signal-to-noise ratio method
To evaluate the performance of the proposed system, the Signal-to-Noise Ratio (SNR) as a metric is applied in the collected signals. SNR quantifies the strength of a desired signal relative to the background noise. This method is crucial in various fields, including the determination of isotope levels in ice cores, assessment of cellular biochemical signaling efficacy, computation of communication channel bandwidth and capacity, and evaluation of EMG signal quality. SNR is expressed in decibels (dB), with a value greater than zero indicating that the signal exceeds the noise. A higher SNR signifies a stronger signal compared to the noise, while a lower SNR indicates excessive noise, which can impede data transfer. The SNR levels are categorized into five distinct groups, as shown in Table 1, with an SNR of over 18 dB considered the standard for EMG acquisition in Chang et al. 31
SNR level categories.

To determine the Signal-to-Noise Ratio (SNR), this study employs the SNR Estimation in Surface Myoelectric Signals (SEMES) method in Agostini and Knaflitz.
32
This method involves a series of steps designed to accurately assess signal quality. Initially, the EMG signal

Where,


Where,

The peaks in the smoothed data indicate the noise peak


The SNR is then calculated as the logarithmic ratio of the signal power to the noise power as follows:

Moreover, the root-mean-square (RMS) value of the background noise

This background noise is measured when the muscle is inactive, reflecting the stability of the skin-electrode interface. Thus, it serves as an appropriate metric for analyzing EMG signal quality. The estimated background noise can be compared to the acceptable
Experiment and discussion
As mentioned in the previous sections, this study introduces an innovative EMG acquisition device incorporating a DRL circuit to mitigate power line interference (PLI) noise. The device accomplishes this by injecting an inverted and amplified common-mode voltage back into the subject’s body via the reference electrode. A jumper connector on the PCB enables switching between common ground (GND) and DRL modes for performance comparison. The system’s output is recorded using the National Instruments PCIe-6321 Digital Analog Acquisition (DAQ) device in National Instruments. 33
Experimental setup
The EMG signal was acquired from the Biceps Brachii muscle of a healthy participant using channel 1 of the proposed device. To ensure accurate measurements, the positive and negative electrodes were carefully positioned on the surface of the belly of the left Bicep Brachii. The reference electrode, crucial for baseline comparison, is placed on the left wrist. For electrode placement, Kendall disposable H135SG Ag/AgCl sensors are utilized. These sensors feature an adhesive backing and conductive liquid hydrogel, ensuring reliable skin contact and minimizing impedance. Figure 7 illustrates the specific electrode positions relative to the Bicep Brachii muscle.

Electrode placements and elbow’s states: (a) position of EMG electrode and (b) experimental evaluation with two states: flexion state and resting state.
Proper electrode placement is critical to obtaining high-quality EMG signals. Surface EMG electrodes should be positioned along the longitudinal midline of the muscle, between the motor unit and the tendinous insertion, with an inter-electrode distance of 1–2 cm for optimal signal acquisition. Electrodes should not be placed on or near the tendon or at the muscle’s edge, as muscle fibers become thinner and fewer in number near the tendon, resulting in weaker EMG signals. Additionally, improper placement near the muscle’s edge increases the likelihood of crosstalk from adjacent muscles, disrupting the recorded signal. While the Surface EMG for the Non-Invasive Assessment of Muscles (SENIAM) project provides guidelines for optimal electrode placement on 27 different muscles, practical application requires experimental validation. 34 To ensure optimal detecting surfaces, it is necessary to evaluate signal amplitude, SNR, and noise levels before proceeding with full data collection.
Two experiments were conducted to activate the left Bicep Brachii muscle: holding and releasing a dumbbell, and elbow flexion. In holding and releasing a dumbbell, the participant sat on a chair with the left hand on the armrest. A 1.5 kg dumbbell was placed on the left hand and kept at rest before releasing the dumbbell. This procedure is repeated three times over 10 s. In elbow flexion, the participant flexed the elbow from its rest state to a 90° position, then returned it to the initial state. This activity was repeated five times within 10 s. The reference electrode was connected to the GND and the DRL circuit in each experiment. The performance of each method is measured using the SNR Estimation in SEMS method.
Results and discussions
The EMG signals collected during the experiments were analyzed in detail to assess the performance of the proposed sensor system. During the dumbbell hold and release experiment, the EMG signals exhibited a clear distinction between the muscle contraction and relaxation phases. The DC offset voltage observed was −40 mV, and the baseline drift of approximately 5 mV was primarily due to motion artifacts and the electrode-electrolyte interface. The high-pass filter effectively mitigated these issues, resulting in a stable signal with an average value around the zero line, as depicted in Figure 8.

EMG signals with DRL reference: (a) after differential amplifier, (b) after high-pass filter, (c) after low-pass filter, and (d) after main amplifier.
The spectral density analysis indicated that the primary energy of the EMG signals lay between 20 and 150 Hz, with high-frequency noise observed in the 150–500 Hz range. The low-pass filter stage smoothed the signal, removing peaks in the frequency domain, and ensuring that the main amplifier did not introduce additional noise, as depicted in Figure 9. The SNR values obtained in the experiments were indicative of the sensor’s ability to capture clean and reliable signals. Specifically, the DRL reference method provided a significant improvement in SNR compared to the GND reference, with values of 23.09 and 19.61 dB respectively, as shown in Table 2.

EMG signals with DRL reference in frequency domain: (a) after differential amplifier, (b) after high-pass filter, (c) after low-pass filter, and (d) after main amplifier.
SNR estimations of the first experiment.
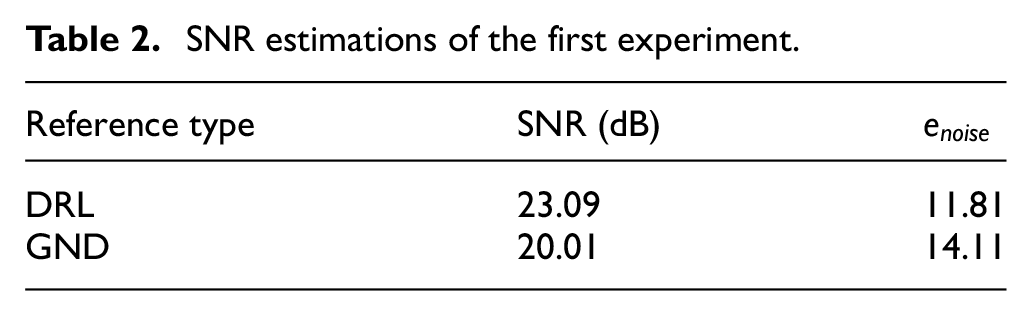
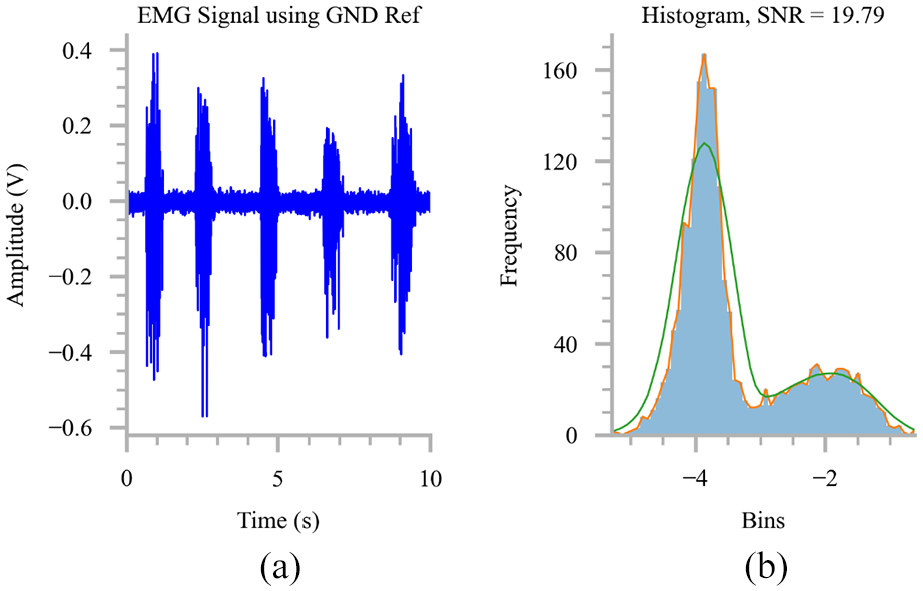
Compare to the GND reference, the baseline noise of EMG signals using the DRL reference was significantly smoother than those using the GND reference, as shown in Figures 10 to 12. Using the method discussed in section “Signal-to-noise ratio method,”Table 2 showed that the signal-to-noise ratio (SNR) using the DRL reference was approximately 3 dB higher than using the GND reference (23.09 vs 20.01 dB). The baseline noise with the DRL reference was also lower (11.81 vs 14.11 µV). Similar results were observed in the elbow flexion experiment included in Table 3, Figures 13 to 15.

EMG signal waveform and frequency spectrum during dumbbell hold and release with: (a, b) DRL reference and (c, d) ground reference.
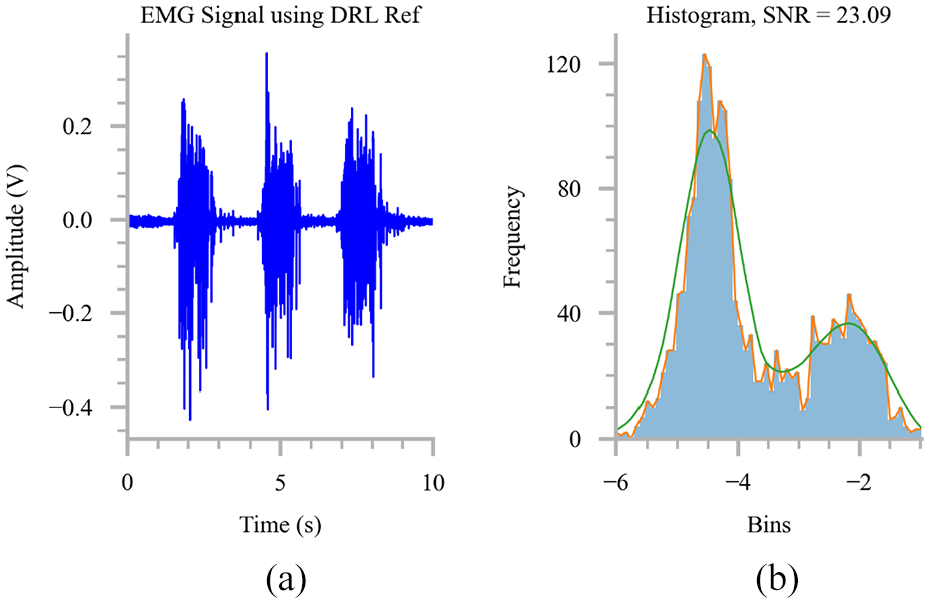
SNR estimation in the first experiment: (a) EMG signal using DRL ref. and (b) histogram.

SNR estimation in the first experiment: (a) EMG signal using GND ref. and (b) histogram.
SNR estimations of the second experiment.


EMG signal waveform and frequency spectrum during elbow flexion with: (a, b) DRL reference and (c, d) ground reference.

SNR estimation in the second experiment: (a) EMG signal using DRL ref. and (b) histogram.
SNR estimation in the second experiment: (a) EMG signal using GND ref. and (b) histogram.
As discussed in section “EMG sensor design,” the DRL circuit attenuates PLI by inverting and amplifying the common-mode voltage and feeding it back into the subject’s body through the reference electrode. This active feedback mechanism effectively cancels out the common-mode voltage and minimizes interference. In contrast, when using the GND reference, external interference may affect both the electrode lines and the subject’s body, leading to increased noise levels.
The performance of the proposed EMG sensor was benchmarked against other existing EMG sensors. Commercial products like the Delsys Trigno boast an SNR of 65 dB in Delsys Incorporated, 35 which is significantly higher than the 23.09 dB achieved by the proposed system. However, it surpasses the performance reported in previous studies (23.1 dB in Wu et al. 4 and 11.76 dB in Supuk et al. 36 ). The cost-effectiveness of the proposed sensor is a notable advantage, with a total component cost of approximately 10.85 USD, making it accessible for widespread application in both research and practical settings. Future research could focus on further improving the sensor’s performance and expanding its application scope. One potential area of improvement is the development of real-time adaptive filtering algorithms that can continuously adjust to varying noise conditions, dynamically enhancing signal clarity in Jamal et al. 37 Machine learning techniques could be employed to effectively identify and mitigate diverse interference sources, further improving the reliability of the EMG signals in Al-Ayyad et al. 38 Furthermore, the implementation of wavelet denoising techniques offers a robust solution for effectively removing Gaussian noise from the data in Chowdhury et al. 39 This advanced method not only cleanses the data by filtering out unwanted noise but also significantly enhances the process of feature extraction. By improving the clarity and quality of the extracted features, wavelet denoising facilitates more accurate and reliable data classification. Advancements in wireless transmission standards, such as improved Bluetooth protocols, could reduce data degradation and interference, ensuring higher data integrity and lower latency.2,6 Additionally, integrating sophisticated shielding materials and designs into the EMG acquisition systems could provide robust protection against environmental noise while maintaining device mobility. 40
Although the proposed system was successfully developed using cost-effective components and has demonstrated promising results, it still has certain limitations that require further research and refinement. One key area for improvement is the component footprint on the PCB, which remains relatively large. Since the current prototype was assembled manually, larger components were selected to facilitate handling with hand tools, such as tweezers. Future prototypes may focus on reducing PCB dimensions by incorporating smaller footprint components and integrating an ADC chip and microcontroller, enabling local EMG signal processing without requiring a PC for analysis. Additionally, the SNR of the proposed system remains significantly lower than that of commercial EMG systems. To address this, modern denoising techniques, such as wavelet denoising, should be explored and experimented. 39
Furthermore, using cable assemblies to capture output with an external device introduces susceptibility to external interference, potentially negating efforts to minimize noise. To mitigate this, future developments could include wireless communication options, such as BLE. By processing signals internally and transmitting the results in a structured message format (e.g. string data type), signal integrity can be preserved, ensuring reliable data transmission to the client device.2–4
Conclusion
This study introduces an innovative design for an electromyography (EMG) acquisition system aimed at enhancing the performance of exoskeletons while maintaining cost-effectiveness. The design provides a comprehensive view of the system’s architecture, encompassing all electrical elements necessary to achieve high-efficiency filter sections. The proposed EMG acquisition system incorporates a DRL circuit, which substantially improves the SNR ratio. Although the SNR does not reach the levels observed in high-end commercial systems, it surpasses those reported in previous studies of low-cost designs. This results in a cleaner and more reliable EMG signal, which is essential in both EMG-based rehabilitation and exoskeleton robot control. The architecture of the proposed EMG acquisition system includes several key components designed to optimize signal quality and processing efficiency. The system begins with a bipolar electrode configuration, progressing through differential amplification, high-pass and low-pass filtering, and finally, main amplification. The differential amplification stage employs the AD620 amplifier, chosen for its high CMRR and low noise characteristics. This stage effectively minimizes errors induced by common-mode voltages, ensuring high input impedance and adjustable gain for the sensor board. The filtering stages are crucial in processing the raw EMG signals. The high-pass filter is designed with a frequency cutoff of 20 Hz and a quality factor of 0.7, effectively eliminating low-frequency noise and motion artifacts. The low-pass filter, with a cutoff frequency of 440 Hz and a quality factor of 0.708, smooths the signal by removing high-frequency noise. These filtering stages enhance the signal’s clarity, facilitating more accurate data analysis and interpretation. The main amplification stage further amplifies the filtered signal, with gain values adjustable based on specific application requirements. Future advancements in EMG acquisition systems will likely focus on further reducing electromagnetic interference (EMI) and enhancing signal quality through several approaches. One promising direction is the implementation of real-time adaptive filtering algorithms. Machine learning techniques can be employed to identify and mitigate diverse interference sources effectively. Wavelet denoising techniques offer another avenue for improvement. By effectively removing Gaussian noise, these techniques can enhance feature extraction, leading to better data classification. The integration of machine learning-based signal detection methods can further improve the accuracy and reliability of the system. In addition to algorithmic enhancements, hardware improvements can also contribute to better signal processing. Implementing wireless connectivity can provide greater flexibility and ease of use, particularly in applications requiring mobility. Proper shielding of the electronic components can protect the system from environmental noise, preserving signal integrity.
Overall, the proposed EMG acquisition system represents a significant step forward in the design of cost-effective, high-performance EMG sensors. Its innovative use of the DRL circuit, combined with advanced filtering circuits, proves it as a valuable component for applications in EMG-based rehabilitation and robotic control. Future research and development efforts will continue to refine and expand the capabilities of such systems, driving advancements in both medical and assistive technologies.
Footnotes
Handling Editor: Chun-Ta Chen
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is funded by the Ministry of Education and Training (Vietnam) under Grant number B2024-VGU-02.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.