
Abstract
The mobility of people with severe visual impairment is limited affecting their comfort and productivity. There are about 45 million people who are blind with global financial burden and annual global cost of productivity estimated to be USD411 billion according to World Health Organization report of 2024. The contributions of the people who are visually impaired to the gross domestic product (GDP) can be enhanced deploying technology. A novel sensory substitution device that enables people who are visually impaired or blind to fairly hear objects in place of seeing objects is proposed. The wearable echolocation device was developed using three ultrasonic sensors, one placed in the right, left, and middle of the goggle with each connected to a buzzer. Audible compass is implemented in the circuitry to guide the user on the direction while walking. In this configuration, the user is guided and alerted of any obstacle within the field of coverage and so can navigate to any desired destination unaided without relying on internet. The developed prototype is easy to use and does not require complex training. The echolocation device was tested by ten enrolled people that are visually impaired or blind who validated its effectiveness and efficiency. The device is comparatively low cost, noninvasive, energy efficient and mass producible.
Keywords
Introduction
Echolocation describes the ability which can be used to sense the surrounding environments based on sound without relying on vision. 1 Animals like bats and dolphins emit ultrasound waves and use the reflected ultrasound waves to locate distant objects. It is therefore possible to either complement or even substitute the sense of vision with hearing in order to perceive the environment.2,3 The understanding and application of this nature defined fact forms the bedrock of this research towards the creation and development of a solution for the people who are visually impaired or blind to enhance their mobility.
Several approaches have been used to aid the people who are visually impaired or blind in moving around safely. People who are visually impaired or blind use white cane or other artifacts to locate obstacles and to move freely. 4 The white colour of the cane makes it conspicuous for people to easily recognize the visually impaired and to avoid being hit by the cane. People who are visually impaired or blind identifies reference points using the white cane and uses same for orientation purposes. The white cane suffers limitations owing to variations in obstacles dimensions, shape, or localization.5,6
Another approach is the use of a guide dog. Seeing-Eye Dog or guide dog is a dog that has been trained to lead people who are visually impaired or blind. The person that is being aided by a guide dog needs to be very alert and to master the signals from the dog. Considering the height of the dog, the obstacles higher than the guide dog may not be detected by the people who are visually impaired or blind. The effectiveness of the guide dog depends on the level of training of the dog and the communication between the people who are visually impaired or blind and the guide dog. 7
Mouth clicks and the returned echo have been used by some people who are visually impaired or blind to sense the surrounding environments. Daniel Kish is an American expert in human echolocation. He uses mouth clicks and the reflected echo to determine obstacles in front of the path. 8 This approach is very complicated and difficult to train the people who are visually impaired or blind because of the distortions and complexity in the spatial resolution of echo.
The conventional assistive navigation solutions for people who are visually impaired or blind are categorized into Electronic Orientation Aids (EOA), Position Locator Devices (PLD), and Electronic Travel Aids (ETA). The EOA focuses on finding the navigation path; it does not detect moving obstacles along the path. The PLD’s deploy the Global Positioning System (GPS) and Geographic Information System (GIS) to accurately determine the precise position of the assistive device during operation. It is not designed to detect obstacles along the path. The ETA’s are focused on detecting obstacles along the path.9,10 There is a need for assistive navigation solution that will provide the functions of EOA, PLD, and ETA to enable the user to not only detect obstacles but as well perceive orientation. In creating this solution, emerging technologies have incorporated GPS and GIS in a manner that makes the developed device dependent on the availability of internet network for operations. Fluctuations in internet connections leading to unstable and unreliable internet service will mean that the users of the device will continuously be exposed to abrupt interruptions and failures of the system. Also internet is scarce, expensive, and unavailable in some locations thereby limiting the use of the existing navigation solutions. This paper therefore proposes an assistive navigation solution that does not rely on internet for operation.
Advanced technologies have introduced vision-to-audio sensory substituted devices using cameras to capture scenes and then transform the image shapes and edges to sound. 11 The captured images needs to be formatted to a gray scale map by scanning and encoding before serially converting to sound and then output using a headphone. 12 These devices suffer a major limitation in its operation process due to its inability to interpret the depth information. Also, it does not deliver real-time output as it will first compare the input image data with the gray-scale map before producing an output thereby introducing delays. 13
The existing artificial intelligence (AI) enabled echolocation devices rely on internet 14 and are not user friendly. Presently, there is a dire need for sensory substituted blind assistance devices with capabilities that will deliver real time, optimal intuitive framework that enables enhanced independent mobility for the people who are visually impaired or blind even in the absence of internet. 15 The critical factors to be considered for echolocation devices deploying ultrasonic sensors are the positioning of the sensor either on the wrist, chest, the forehead, or attached to a wearable goggle. Another important factor is the number of ultrasonic sensors implemented in the device. These two factors determine the field of view covered by the device.
The identified limitations of the existing navigational products for people who are visually impaired or blind are high cost, over reliance on internet, delays caused by conversion of camera images, complex systems that are not user friendly, limited field of view, and high electric power consumption due to the complexity of the devices. This research therefore developed a wearable goggle echolocation device with three ultrasonic sensors and audible compass that cover the limitations of the existing technologies.
The global visual impairment market is estimated at US$4,362.8 million in 2023 and is expected to exhibit a Compound Annual Growth Rate (CAGR) of 8.1% over the forecast period (2023 – 2027) according to Coherent Market Insights report.
16
This shows strong market potentials for the developed novel product. The global visual impairment market share percent in terms of value by region as at 2023 is presented in Figure 1. The global visual impairment market share percent in terms of value by region as at 2023. Source: Coherent Market Insights.
The design objectives of this research is to develop a wearable goggle echolocation device that is independent of internet, low cost, easily deployable with little training, with the capacity to detect obstacles and sense orientation.
Design approach and methods
Design approach (empathy-based design)
In this research, the engineering design method that was used to develop the echolocation device is empathy-based design to create a perceptual support that aims to substitute the deficiency in vision with haptic and acoustic solutions deploying ultrasonic sensors and audible compass. Empathy-based design engineering method focuses on achieving inclusive and effective community through providing care and support for the wellbeing of others especially the vulnerable. The process involves collecting data directly from users via interviews, surveys, observation and persona evaluation towards conceptualizing, designing developing products that perfectly solves the users’ needs. 17 Deploying this method, the users’ participated and contributed significantly in the design and development process enabling the authors to understand and translate the perspectives of diverse stakeholders in the wearable goggle echolocation device.
In order to reinforce all-inclusiveness and empathetic engineering, the following steps were followed in the development process of the wearable goggle echolocation device. Establishment of contact with the community of people who are visually impaired or blind at the University of Lagos, Nigeria, through the Student Affairs office at the campus; Holding of periodic meetings and interviews with the community to share ideas on the assistive device effects on moral, social, ecological dimensions of human life; Identifying the needs of the target community and clearly explaining the progress in the development of the device, adopting feedback from the community and implementing ideas that focuses on cost reduction, operational efficiency, and convenience of the users; Validation and refinement of the developed device through trial tests by volunteered participants drawn from the community.
Ethical approval
All the people who are visually impaired or blind that participated in the validation of the developed echolocation device were briefed on the background and details of the experiment. The ultrasonic waves are sound waves with frequencies above human audible range of 20 KHz.
18
The generated ultrasonic waves are not harmful and have no health hazard. Each of the participants executed a consent form indicating their consent and awareness of the experiment protocols. The University of Lagos, Nigeria Research Management Office reviewed the research protocols and granted an ethical approval for the research to be conducted. The authors hereby state as follows: • In this research, all methods were carried out in accordance with relevant guidelines and regulations. • All experimental protocols were approved by Research Management Office, University of Lagos, Nigeria (NHREC/07/02/2022A). • Informed written consent was obtained from all the people who are visually impaired or blind that participated in the validation of the developed device.
Participants
The University of Lagos, Nigeria community for the people who are visually impaired or blind with a population of 325 candidates both past and present students participated in the survey.
Survey to identify the actual navigation assistive tools needed by the people who are visually impaired or blind
The University of Lagos, Nigeria, community for people who are visually impaired or blind usually meets and interacts at the library created for them located inside the Akoka campus. The community maintains detailed records of all their current and former student members for collaborations and their well-beings. A questionnaire seeking to identify the needs of the people who are visually impaired or blind in echolocation device was designed and shared to the community for people who are visually impaired or blind at University of Lagos, Nigeria with a population of 56 students. The questionnaire was also transmitted via email to former members of the community numbering 269 students. The questionnaire covers information on the awareness of the available echolocation devices, its limitations, effectiveness and efficiencies of the existing echolocation devices, the desirable features needed to be introduced to the echolocation devices.
In the feedback report, 237 candidates unanimously mentioned that the available echolocation devices in the market are too complex, not user friendly, with limited poor field of view, unaffordable, and are based on internet making them non-functional and unattractive for them since they do not have access to steady internet. 13 candidates stated that they only use theirs indoors and when they travel to America because of the reliance on internet but also wish that it could be made more user-friendly. 53 candidates mentioned that they have never been in contact with echolocation device. 22 candidates did not respond. The identified limitations of echolocation devices are dependence on internet, high cost, poor field of view, and complexity leading to difficulty in learning how to use the device. 19
Instrument
The approach of this design is to eliminate dependence on internet by introducing audible compass as a substitution to Internet of Things (IoT) solution. Also to deploy ultrasonic sensors for the detection of objects in simple architecture that enhanced the field of view of the developed device and lowered the overall cost of the device.
The development of the prototype wearable goggle echolocation device
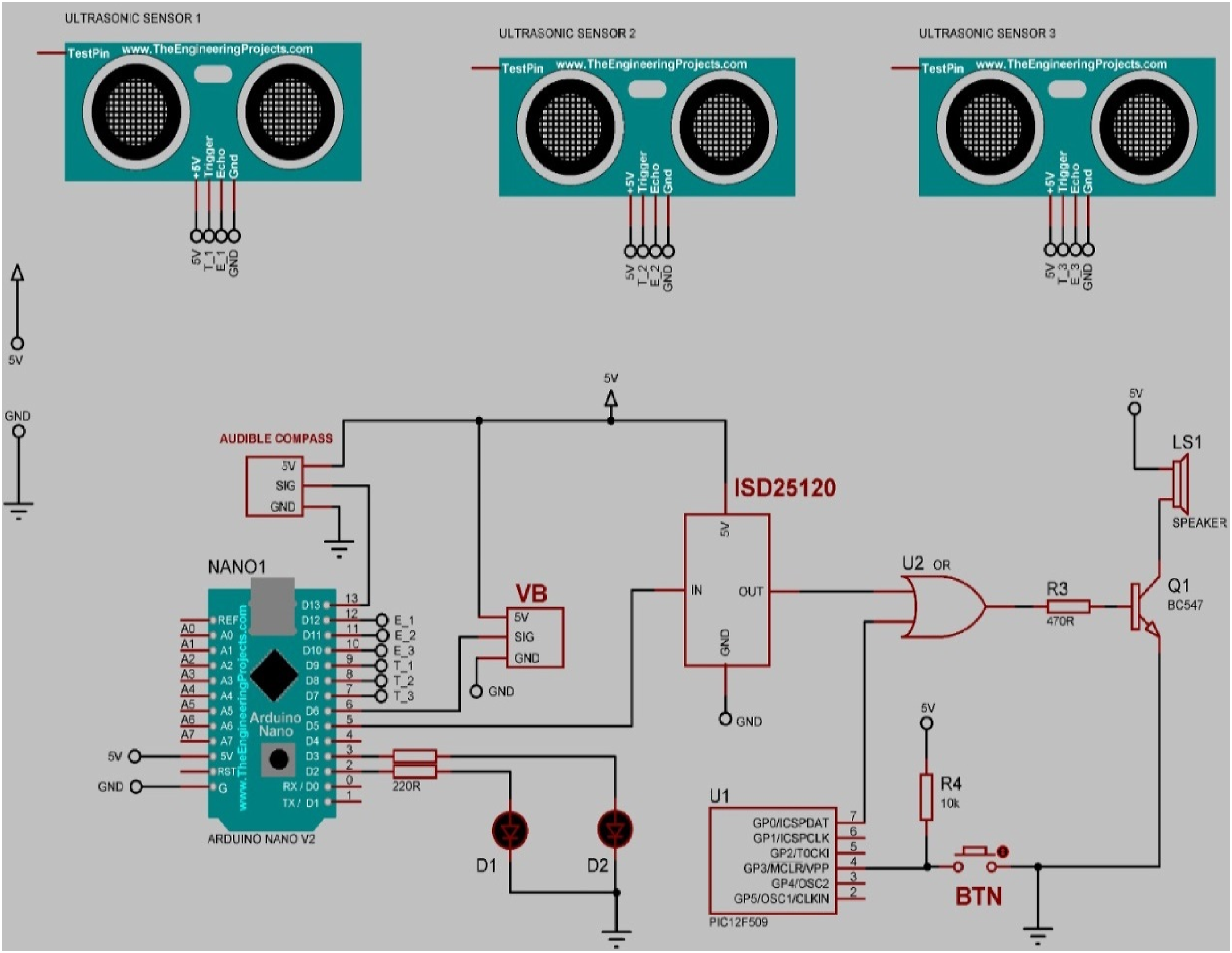
The developed echolocation device key components are three ultrasonic sensors, audible compass, microcontrollers, buzzer, wearable goggle, and a 9 Volts power supply unit. The block diagram showing the operation of the developed device is presented in Figure 2(a) and the developed wearable echolocation device with the button is shown in Figure 2(b). The flowchart illustrating the assigning of each unique sound to each logic condition is as described in Figure 3. The circuit diagram of the developed echolocation device showing the components and connections of the electronic circuit is presented in Figure 4. (a) Block diagram showing the operation of the wearable goggle echolocation device. (b) is the developed wearable goggle echolocation device front view, side view, back view and the handheld button. Flowchart illustrating the assignment of sound for each logic position. The circuit diagram of the developed echolocation device.

Design
The heart of the developed echolocation device is the ultrasonic sensor. Three ultrasonic sensors were positioned one on the right, 12 cm from the center of the goggle, one on the left at 12 cm from the center of the goggle, and another on the center of the wearable goggle. Ultrasonic waves generated and transmitted within 60 cm range from each of the sensors will reflect back upon interactions with any obstacle. A microcontroller determines the distance between each of the ultrasonic sensors and the detected obstacle and then triggers the buzzer to output unique recorded sound. The buzzer connected to the microcontroller is configured to output any of the recorded sounds from a sample of eight recorded sounds in the ISD25120. A sound is also assigned, when no obstacle is detected simultaneously by the three ultrasonic sensors. The various sounds assigned to each logic condition are achieved by using the logic as described in the flow chat in Figure 3.
A 3-Axis Compass integrated circuit (IC) HMC5883L connected to the ATMEGA microcontroller performs the function of an audible compass with the output connected to the speaker as described in Figure 2. The audible compass guides the user on the direction and location while in motion.
The echolocation wearable goggle device can be kept at any convenient place by the people who are visually impaired or blind when not in use. In order to create easy access to the device at any spot towards identifying the exact location of the device at any time, a handheld miniaturized button is provided in the design. The user upon clicking the button will activate the vibrator through the PIC12P509 microchip which sends signal to the speaker generating a sound that alerts the user of the position of the echolocation device. That way the user can follow the generated sound each time the person clicks the button to easily track and pick the echolocation goggle.
Both the recorded sounds for detecting obstacles and the sound activated by the button use the same output speaker. OR-Gate logic was implemented in the circuitry to achieve this system as shown in Figure 4. So it is either the speaker is having an output from the device while in use or it is delivering an output from the button when it is not in use.
It is very important that a faulty ultrasonic sensor is detected immediately to prevent endangering the life of the user by delivering false reports. A combination of two light emitting diodes (LED), one red and the other green together with the vibrator system were used to determine when any of the ultrasonic sensors is malfunctioning. Initially samples of the ultrasonic pulse frequency delivered by each of the ultrasonic sensors which is usually 40 kHz are fed into the input of the Arduino microcontroller to read the signal. The transmitted ultrasonic waves from each of the sensors are compared with the stored frequency of 40 kHz through the comparator of the microcontroller. Any output out of the range will switch on the red LED and also activate the vibrator to be continuously ON. If the output is within the range, then the microcontroller will switch on the green LED and it will remain ON. In the implemented system, it is easy to detect a malfunctioning ultrasonic sensor if the vibrator is continuously ON. Although the visually impaired user will not see the LEDs, it is easy to feel the continuous vibration generated by the vibrator. Also, diagnosing a faulty ultrasonic sensor during repairs is simple since the red LED will be permanently ON.
Echolocation device power supply
The wearable echolocation goggle use 12 V 7.2 AH Direct current (DC) rechargeable battery designed for mobile phones. The battery small size and light weight enables it to fit inside the circuitry in the headset. It is projected that the battery if fully charged, will last for 48 hours before fully drained. 20 It is recommended to have a spare fully charged battery while using the developed echolocation goggle so that the battery can be replaced immediately with the spare battery once it drains. The device can also be connected and be recharged using a lithium ion battery power-bank.
The operation of the ultrasonic sensor
The HC-SR04 ultrasonic sensor was used in the developed echolocation device. The ultrasonic sensor comes with four pins, the voltage common collector (VCC), Trigger, Echo, and Ground. The three ultrasonic sensors were interfaced with the Arduino microcontroller as shown in the circuit diagram on Figure 4. In the active state the three ultrasonic sensors transmits sonic signals which reflects back part of the emitted waves upon impact with a surface and is received by the receiver. Theoretically, the relationship between the speed and time of the generated signal is described in equations (1) and (2)


The rated speed of the acoustic waves emitted by the ultrasonic sensor is about 330 m/s so the distance is derived from the time taken between the transmitted signals and the received signals. 21 The actual distance is obtained by dividing the given distance by two since the signal reflects back to origin. An obstacle is detected by the echolocation device by the reflection of the ultrasonic waves and the beeping sound generated by the speaker depends on the logic output from the three ultrasonic sensors. Any faulty ultrasonic sensor will trigger the red LED to be switched ON and the vibrator to constantly vibrate. So, the safety of the user is ensured by promptly being alerted when the device malfunctions.
The echolocation microcontroller
The Arduino Nano board based on microcontroller ATmega328 was used to interface the three ultrasonic sensors, the vibrator, the ISD25120 chip, and the audible compass. Here we implement the Arduino Nano V3 because of its smallest dimensions and pin headers that allow for easy attachment onto a circuit board. 22 The wearable goggle is designed to be light weight and small in size and hence the choice of Arduino Nano. The Arduino Nano is equipped with 30 input/output headers, in a Dual in-line package 30 like configuration as shown in the circuit diagram in Figure 4. The microcontroller was programmed using the Arduino software integrated development environment (IDE). 23 The code and programming of the microcontroller is available upon request via email from the corresponding author. As part of the plans for the commercialization of the echolocation device, the current design will be replaced with a printed circuit to further miniaturize the circuit and also reduce the weight. 24
The recording of the distinctive unique sounds in the echolocation device
Truth-table for the possible outcomes using three ultrasonic sensors.

Describing the Assignment of sounds for the possible outcomes using three ultrasonic sensors.

Cost of the developed echolocation device
Costing of the echolocation device.

Experiments conducted (design testing details)
Each of the participants performed the series of tasks by completing all the tasks from A to E before repeating each task. So, the first participant engaged in the five different tasks for the first trial before repeating the different tasks for the second trial. The first task “A” is to pass through the stairs and open the door wearing the developed echolocation device as the navigation aid. The second task “B” is to pass through the corridor. The third task “C” is to walk through the corridor without hitting any of the obstacles positioned randomly. The fourth task “D” is to enter the room and pick a cup placed on the table. The fifth task “E” is to click the echolocation button and follow the generated sound to pick the echolocation goggle where it was placed on a stool. The participants completed all the tasks ten times by engaging in different tasks during each trial session. The testing of the echolocation goggle is described in Figure 5(a) and (b). The various tests performed by the participants followed the previously demonstrated tests in existing literature.
26
(a) Each of the five people who are visually impaired or blind that participated in the trial tests performed the tasks from ‘A’ to ‘E’ ten times. Task ‘A’ pass through the stairs and open the door. Task ‘B’ pass through the corridor. Task ‘C’ pass through the corridor without hitting any of the obstacles positioned randomly. Task ‘D’ enter the room and pick the cup placed on the table. Task ‘E’ click the echolocation button and follow the generated sound to pick the echolocation goggle where it was placed on a stool. (b) The average percentage pass and failure rate for the entire tasks.
Results
Trial test of the developed echolocation goggle by five participants.

Average Percentage Pass = 95.6%. Average Percentage Failure = 4.4%.
The developed wearable echolocation goggle performed well delivering only 4.4% failure rate. It is important to note that there are no established regulatory tests for wearable sensory substitution devices making the failure rate to be dependent on the trial tasks, deployed technology, and the participants’ cognitive ability. The adopted tasks are similar to the one previously reported by Petsiuk and Pearce 27 in 2019 which produced failure rate of 6.7% so, the developed wearable echolocation goggle demonstrates a remarkable improvement. The more challenging tasks were in climbing the stairs and also in picking the cup placed on the table. The participants needed to understand the change in sound as they climbed the stairs. Same applies to picking the cup from the table. It was observed that the failure was recorded within the first to third attempts while other trials were successful.
In executing task ‘D’, the participants were already informed of the position of the cup on the table so they were expected to follow the direction of the audible compass to locate the cup. The task was the most challenging for all the participants.
Generally, the more time the participants used the echolocation goggle, the more they adapted to the different sounds and effectively and efficiently implemented the sensory substitution.28,29 Figure 5(a) describes the various tests while Figure 5(b) be presents the outcome in percentage pass and failure rate.
Discussion
The results show that the developed device not only detects an obstacle but also indicates the orientation and direction of the user while in motion. It is very convenient to wear and possesses a very wide field of view enabled by the arrangement of the three ultrasonic sensors covering the front and side views.
A comparison of the cost of some of the available sensory substitution products and their sensor technologies. 30

The novelty of the developed echolocation device
The developed echolocation device solves the problems of unstable internet by eliminating the reliance on internet. The incorporated audible compass guides the user on the desired direction and location there by replacing the need for IoT. Understanding the geographical location while the user is in motion is a very important factor lacking in the available variants. In the developed device, the user is prompted on the orientation and direction with respect to the north, south, east and west poles.
The implementation of ultrasonic sensors in unique architecture enabled the developed echolocation device to deliver real-time detection of obstacles similar to the operation of eye vision with a wider field of view. The device is very user-friendly as demonstrated in the trial tests. The developed device does not rely on cameras to capture scenes which eliminate the delay in response time of the existing variants. 31 It does not require implantation of any part of the device into the body making it totally noninvasive. The design and packaging of the device enables it to be affordable and easily available and sold in stores to the needy people who are visually impaired or blind without any specialists’ recommendation.
A collapsible platform wirelessly connected to a remote push button was included as an ad-on to the device to enable the user to be able to identify the location where the echolocation device is kept when not in use. So, the user clicks on the button and then follows the beep sound from the buzzer on the collapsible platform to get to the position of the echolocation device to collect it before use.
The limitations of this research
The developed device at the present prototype stage, cannot detect horizontal land gradients like gutters or abrupt valleys around an uneven landscape. Further improvements in the developed device will include more sensor technologies to train the system to identify depressions and valleys in the landscape but that will come with increased number of electronic components, more power consumption, and additional cost. 32 The fabrication of the virtual reality headset used in the packaging of the device is not discussed in this paper.
According to existing reports, indoors soft fabrics, such as window curtains, furniture, and indoor flowers, foams on liquid surfaces, can cause distortions in distance estimation due to acoustic wave absorption. 27 The users of the developed echolocation device are informed of these limitations of ultrasonic based devices.
Contributions of the present work
The all-inclusive empathetic engineering method deployed in the conceptualization, design, development and validation of this wearable echolocation goggle is a major contribution to the protocols towards the development of assistive devices for people who are visually impaired or blind. 33 The combination of three ultrasonic sensors in the deployed architecture of the echolocation device is unique and achieved high levels of efficiency in guiding the people who are visually impaired or blind by increasing the field of view. Also the incorporation of audio compass to the echolocation device is very ideal for proper orientation of the user and eliminated its dependence on internet.
The mobility of the people who are visually impaired or blind will be significantly enhanced with the developed novel product since it is comparatively low cost and therefore is likely to be more affordable especially for people in low income countries of Africa. Fewer electronic components were deployed in the developed echolocation device achieving low electric power consumption. The aesthetic design of the wearable goggles is very beautiful and convenient with adjustable belt to hold it firmly to the face. Cameras are not implemented in the developed echolocation device which eliminates the delays introduced by the conversion of vision to sound in the existing available variants. The drawbacks associated with cost and complexities in the available variants are eliminated in this present work.
Other variants of echolocation devices have major setbacks with the battery life owing to high power consumption of the many electronic components deployed in the system. The design, light weight and compact size of the developed echolocation device make it very convenient to wear during operation.
Future work
The developed echolocation device capabilities will be enhanced to be able to detect abrupt horizontal depth variations in the next design planned in 2026. Artificial intelligence algorithms will be deployed to train the device operation. The circuit board will be replaced with a printed circuit to further miniaturize the echolocation goggle and also reduce the weight.
In the testing and validation of the advanced product, we plan to increase the number of participants from five to 50 for a more detailed data. The survey and validation tests will be conducted in four different geographic locations. 34 Also, the test methods will include more rigorous tasks to demonstrate its effectiveness and efficiency.
All the projected improvements of the echolocation device will be in collaboration with the people who are visually impaired or blind through a survey and validation testing to continuously monitor their navigation and mobility needs until the new product perfectly covers all their demands. In that way, an inclusive design method is planned for the next phase of the research work.
Conclusion
An echolocation device has been developed to enhance the mobility of the people who are visually impaired or blind and to increase their contributions to the global economy. The developed device proffers solutions to the limitations of the existing variants such as improved operational efficiency, convenience, non-dependence to internet and low cost.
This research is in line with sustainable development goal 10 which emphasizes on the significance of addressing the challenges faced by those with disabilities as it affects the people who are visually impaired or blind. The echolocation device is an adaptive technology for people with visually impaired disability enabling them to live an independent life. 35
There is a huge market for the developed device considering the global population of blind people. In a situation where vision enhancement or vision replacement strategies are unsuccessful, vision substitution is the last available option and succor. The components used in the development of the echolocation device are locally available in the electronic stores and the finished product is mass producible. Investing in the commercialization of the developed innovative product will create excellent return on investment for all the stakeholders considering the enormous market globally and the very low cost of the device.
Footnotes
Acknowledgements
We thank the staff of Department of Physics Workshop, University of Lagos for providing the materials and resources for this research. Also, we extend our gratitude to Mr Funso Williams for assisting in the preparation of the graphics for this paper.
Author Contributions
Uzoma Oduah: Conceptualization, Methodology, Software, Writing-Original draft preparation. Oluwasegun Adewumi: Implementation, Writing-Reviewing and Editing. Kingsley Agbakansi: Visualization, Construction, Packaging, Validation. Daniel Oluwole: Implementation, Software, Construction, Writing-Reviewing and Editing. All the authors reviewed and approved the submission of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Guarantor
University of Lagos, Nigeria.
Additional information
The microcontroller source code and any other information can be obtained from the corresponding author via email.