
Abstract
Service robots have been adopted in many industries, including hospitality. Yet the conditions under which customers see these robotic assistants as social entities remain unclear. This research investigates how different levels of social influence, including a service robot’s communication skills (i.e., congruent co-verbal gestures), the degree of commensality (i.e., social practice of dining together), and customers’ interactive experiences (i.e., interaction with the robot), shape human–robot interaction and subsequent service robot adoption. Three interconnected studies, including two online experiments and one field study at a restaurant, were conducted based on social impact theory. The results suggest that customers require a certain level of social influence to perceive a service robot’s social presence. This type of presence is the primary factor informing service robot adoption at low to moderate levels of social influence. However, as the level of social influence increases, customers begin to rely more on their interactive experiences (e.g., while dining or interacting with the service robot directly) when making adoption decisions. This research offers several meaningful implications. Theoretically, it is one of the first to experimentally assess the effects of social presence, customers’ dining experiences, and interactivity on service robot adoption under varying levels of social influence. Practically, it provides useful insights for managers by contextualizing customers’ real-world behavior in a restaurant setting.
Introduction
Robotics’ penetration into numerous industries, including tourism and hospitality, has expanded the possibilities for human–robot interaction (HRI; Huang et al., 2024; Kim et al., 2022; Liu et al., 2025; So et al., 2024). For example, service robot (SR) usage in the food sector was estimated to have generated roughly half a billion U.S. dollars ($0.43 billion) in revenue by 2024, with an anticipated annual growth rate of 4.36% through 2028 (Statista, 2024). SRs’ use has attracted attention from both customers and the academic community, given these robots’ abilities to perform tasks and interact with humans (Huang et al., 2025; So et al., 2023, 2024).
SR-related investigations often examine the design of robots that assume social roles while performing required service tasks, which are key to frontline service delivery (Liu et al., 2025; Qian & Wan, 2024). Experiential and psychological factors have been studied in recent years to gauge consumers’ perceptions of SRs. Aspects of interest include the customer experience (e.g., Begum et al., 2025; Mende et al., 2019; Rana et al., 2025), social presence (e.g., Himanshu Goel et al., 2025; van Doorn et al., 2017), and customers’ attitudes and behavioral intentions (e.g., Cui & Zhong, 2023; Qian & Wan, 2024). In terms of human sociality, SR adoption is intended to better assist customers (Fotheringham & Wiles, 2023; McCartney & McCartney, 2020) as they navigate the service ecosystem’s social environment alongside other actors (e.g., employees and other patrons). It is accordingly crucial to explore social influence (Kim et al., 2022).
Social cues, such as voice and body language, can introduce stereotypes and shape people’s opinions of SRs (van Doorn et al., 2017; Premathilake & Li, 2024). The extended “computers are social actors” paradigm (Nass & Moon, 2000) holds that people apply social cues to interact with computers as they would with humans (Rana et al., 2025). As robots increasingly operate in human settings (e.g., homes, workplaces, and public spaces), they are no longer seen as mere tools; they represent social actors capable of interpersonal engagement (Jang et al., 2024; Liu et al., 2025). From a psychological standpoint, humans are predisposed to respond to social cues even when interacting with non-human agents (Kao & Huang, 2023; Li & Larivière, 2023; Rana et al., 2025). Research in social robotics and computer-mediated communication has demonstrated that people attribute intentions, emotions, and personalities to robots, particularly when these agents exhibit human-like behaviors such as eye contact, gestures, or speech (e.g., Liu et al., 2025). Such social cues activate normative expectations and social scripts that guide people’s behavior: individuals then conform, comply, or otherwise adjust their actions based on perceived social presence or pressure (Fox & Gambino, 2021; Himanshu Goel et al., 2025). These features are known to mold consumers’ perceptions of SR (e.g., Himanshu Goel et al., 2025; Huang et al., 2025). Despite this recognition, the relationships among social influence, social presence, and SR adoption remain underexplored; scholars have not fully described social factors in this context (e.g., Jiao et al., 2024; Wilson et al., 2025). Little is known about how HRI may alter customers’ adoption strategies through mechanisms of social impact (e.g., physiological states, subjective feelings, motives and emotions, cognitions, and beliefs; Latané, 1981). These mechanisms—namely strength, immediacy, and the number of social sources—heighten social presence and in turn guide individuals’ experiences and willingness to use SRs (Jang et al., 2024; Li et al., 2025). Restaurants naturally involve varied interactions during service encounters, such as in terms of ordering and seating (Kao & Huang, 2023), technology use (Jang et al., 2024), and checking in or asking questions (So et al., 2023). This context offers rich opportunities to consider how SRs affect customers’ social and experiential outcomes (Himanshu Goel et al., 2025; Jiao et al., 2024).
Given the centrality of social presence and interactivity to SR adoption (Begum et al., 2025), this research addresses the identified knowledge gap by applying social impact theory (Latané, 1981). We specifically investigate how differing levels of social influence shape restaurant customers’ HRI experiences and subsequent SR adoption. In doing so, we highlight potential barriers that restaurants may face due to a lack of a comprehensive framework for HRI and SR adoption (e.g., how customers modify their SR adoption strategies based on social influence). Furthermore, we respond to calls for theoretical advances in SR research (e.g., Kim et al., 2022; Mende et al., 2019) by conducting field experiments that manipulate a sophisticated SR in hypothetical and real-world restaurant settings. Our design emphasizes the salience of direct interactive experiences and social presence in SR adoption while showing that social interaction can extend beyond humans to include HRI. Our work also offers insights for industry professionals seeking to efficiently manage SRs during restaurant service, showcasing the promise of SR adoption in the ever-evolving hospitality industry. The following section describes our theoretical foundation and hypothesis development. Our three experiments are presented thereafter.
Conceptual Development
Social Impact Theory and Service Robots (SRs)
Social impact theory posits that social interaction can induce changes in one’s emotions, opinions, attitudes, or behavior, especially across varying levels of socialness (Latané, 1981). Researchers have pondered the role of social influence in HRI from several theoretical angles, including “computers are social actors” theory (Fox & Gambino, 2021), the unified theory of acceptance and use of technology (Goel et al., 2025), and social presence theory (Song et al., 2024). However, the literature has tended to stress utilitarian predictors (e.g., performance expectancy, effort expectancy, facilitating conditions, and privacy risk) while overlooking social influence’s multidimensional nature (e.g., Lee et al., 2025; Marghany et al., 2025). Building on theoretical progress, social impact theory offers a valuable lens for discerning the nuanced effects of social influence in HRI; this factor is modeled as a function of interaction strength, immediacy, and the number of influencing sources (Liu et al., 2025). This viewpoint yields insights for designing SRs that are perceived not just as tools but as entities capable of authentic interaction across numerous dimensions. For instance, scholars have found that people are inclined to interact with humanoid robots when these agents are highly sociable (Liu et al., 2025). An SR’s ability to be socially present (i.e., viewed by others as a real subject or person) enables it to influence those around it (Kim et al., 2021). Furthermore, socially impactful robots can inform people’s choices, ranging from consumption decisions to ethical judgments (Kim et al., 2022; Li & Larivière, 2023). We leverage social impact theory to further illuminate decision-making realms where SRs considerably affect individuals’ choices.
Social Influence and Anthropomorphism
Anthropomorphism, a concept that HRI studies have emphasized (So et al., 2024), enhances people’s perceptions of certain traits of non-human entities (Huang et al., 2024; Li et al., 2023; Song et al., 2024). The HRI literature indicates that social influence crucially shapes customers’ SR acceptance, with anthropomorphism being one mechanism through which this influence operates (Kim et al., 2025). Robots more easily align with customers’ social expectations when they display human-like features and behavior: these attributes render them more familiar, trustworthy, and socially acceptable to consumers (So et al., 2024; Song et al., 2024; Zourrig et al., 2025). Higher anthropomorphism strengthens the social influence’s impact by signaling that robots can engage meaningfully in interpersonal interaction. The effects of peers, family, or other customers’ opinions on one’s willingness to adopt and use SRs in hospitality settings are amplified as well (Huang et al., 2024; Kim et al., 2025; So et al., 2024). We draw from research on anthropomorphism in scrutinizing HRI. In particular, we contemplate how different dimensions of social influence affect people’s interactions with robots and their ultimate SR adoption in a hospitality setting. This approach integrates important but understudied social factors while offering guidance on designing robots that are at once technologically effective and socially appealing.
Social Influence on Customers
Social influence (e.g., social cues and information) affects people’s social cognition and subsequent behavior (Bandura, 1986). Nass and Moon (2000) argued that individuals often use social cues to trigger cognitive heuristics and therefore interact with computers as if they were humans. SRs’ social influence has thus far been examined based on characteristics such as social norms (Shi et al., 2021) and spontaneous social influence (Tojib et al., 2022). Studies have explored social influence in HRI through assorted dimensions, including voice and body language (Premathilake & Li, 2024), personality (Li & Larivière, 2023), interactive experiences (Fang et al., 2025), rapport (Kao & Huang, 2023), and SRs’ social skills and usefulness (Fox & Gambino, 2021). People appear more likely to view SRs positively when social factors are incorporated into interactions (Huang et al., 2024). However, social impact theory asserts that social influence is not a unidimensional construct; it instead comprises multiple layers, especially strength, immediacy, and the number of influencing sources (Latané, 1981). Meanwhile, scholars have yet to determine how varied levels of social influence shape customers’ HRI experiences.
Researchers have discussed HRI experiences with reference to concepts such as perceived automated social presence (Kim et al., 2022; van Doorn et al., 2017), service experiences (Zhang et al., 2024), and interactive experiences (Kim et al., 2021). Despite these considerations, the relationships among levels of social influence, social presence, HRI experiences, and SR adoption are unclear. We aim to fill these gaps by applying social impact theory to address the following research questions: (1) How do varying degrees of social influence affect the HRI experience? (2) How does the HRI experience contribute to customers’ perceptions of SR adoption across different social situations? Figure 1 depicts our proposed conceptual model.
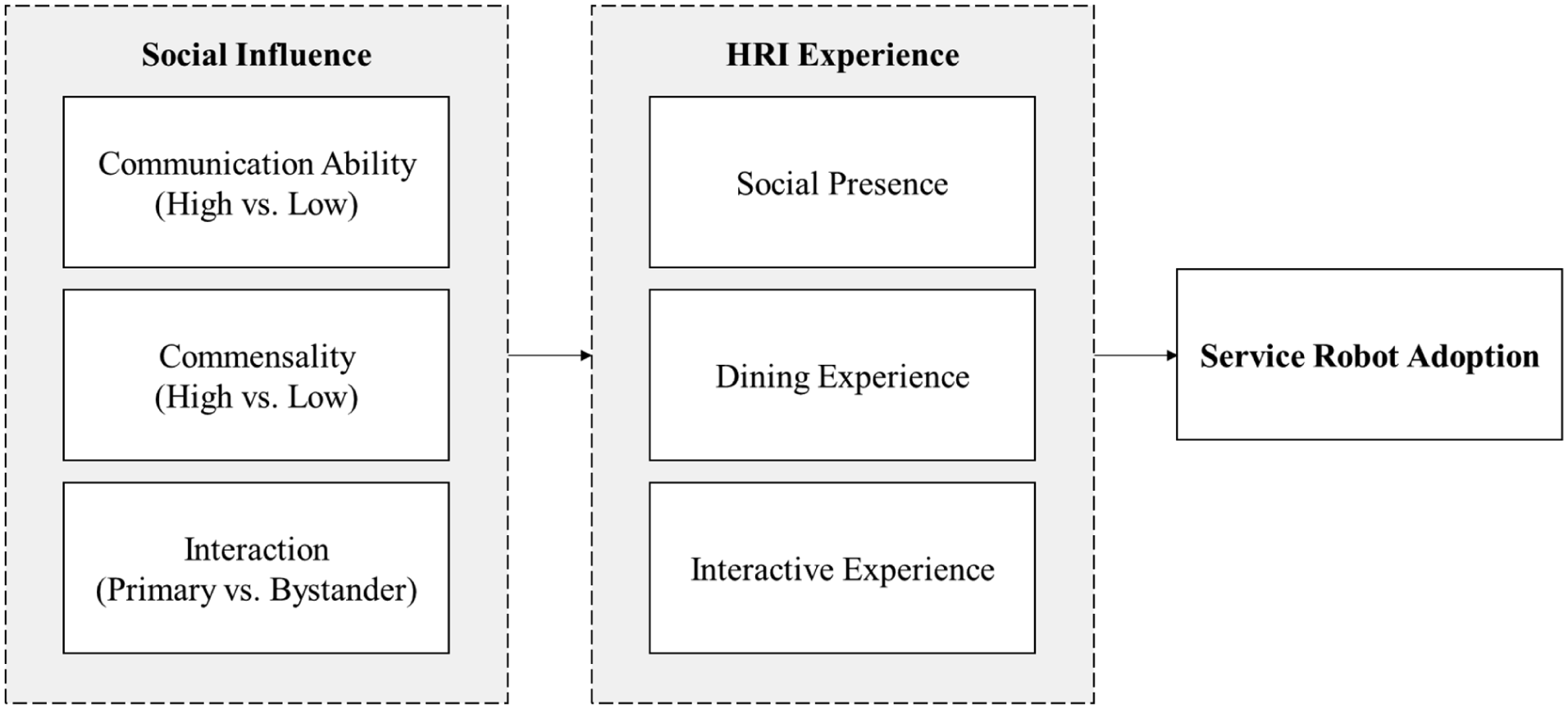
Proposed Model.
Social Presence and SR Adoption
Humans need social information to activate social cognition and develop an impression of being physically with a social identity (van Doorn et al., 2017). For example, SRs that possess a social appearance and can interact with people are thought to have a more robust social presence than SRs without these features (Chen et al., 2024; Kim et al., 2022). Presumably, and in line with social impact theory, an SR’s social presence will likely strengthen as the robot’s number of social factors increases.
Communication ability is a common social factor. It has often been studied along with SRs’ anthropomorphic features (e.g., sociability) in hopes of improving these robots’ social skills (Goble & Edwards, 2018). SRs that can verbally communicate have been found to engender perceived friendship (Grigore et al., 2016) and to deliver interpersonal communication cues that enhance social presence during HRI (Goble & Edwards, 2018; Saunderson & Nejat, 2019). In addition, Salem et al. (2013) observed that SRs equipped with verbal communication abilities and congruent co-verbal gestures could promote users’ SR reception, including in terms of likability, shared reality, and future contact intention. We thus consider SRs’ presence or absence of co-verbal gestures as a social factor that could influence consumers’ perceived social presence.
Social factors’ roles can also be extended to environmental influence (i.e., how the social environment affects people). Commensality, defined as the practice of an individual eating or sharing food in a group with one or more guests (Fischler, 2011), exemplifies this type of influence. It has played a major role in European society for years and exerts an overall social impact (Sobal & Nelson, 2003), particularly with respect to group interaction (Bugge & Almås, 2006).
When a customer engages in service consumption at a restaurant, their opinion of service will differ based on whether they are a solo or group diner (Sobal & Nelson, 2003). Solo diners usually value the food and the complete restaurant experience more (Choi et al., 2020), whereas many group diners enjoy building connections with others (Pramudya et al., 2022). More importantly, because forms of sociality can vary between humans themselves and between humans and things, SRs may enrich the social context in which service is provided (Reckwitz, 2018). For instance, Preusse et al. (2021) noted that groups are more likely to interact with an SR than with individual people in public.
Service consumption regularly involves more than one customer. We therefore expand on the idea of serving multiple people by accounting for commensality’s role during gastronomic service (Muñoz et al., 2018). In brief, we assume that the degree of commensality shapes consumers’ perceptions of HRI and social presence in a service scenario. This relationship operates through the mechanisms that link commensality to robot social influence. First, the act of eating together creates a distinctive social environment with heightened interpersonal awareness; diners in this situation are generally more receptive to social signals from all participants (including SRs). In such cases, when multiple customers engage with a robot, their shared experience validates the robot’s social presence through collective observation and response. Second, social facilitation effects (Uziel, 2007) may extend to HRI in group dining: customers’ reactions to robots are influenced by and reinforce fellow diners’ responses. Finally, when an SR becomes the focus of joint attention during commensal dining, it transitions from a functional service element to an integrated participant. This attentional convergence (i.e., one diner’s engagement triggers similar reactions from others) boosts the robot’s social influence by embedding the SR in the collective dining experience. Through these mechanisms, commensality serves as a social catalyst that strengthens an SR’s social presence. We reflect on social impact theory and the notions of communication ability and commensality in proposing that stronger social influence will enhance an SR’s social presence as perceived by customers:
Social presence activates individuals’ social cognition. This process causes people to acknowledge the existence of a target object (e.g., an SR) and in turn affects their behavior (Čaić et al., 2020). The perceived social presence of SRs is quite influential: it plays a role in customers’ usage intentions (Kim et al., 2022); the perceived usefulness, trustworthiness, and emotional appeal of SRs (Chen et al., 2024; Shin & Choo, 2011); and anticipated service quality (Flavián et al., 2024).
Because social presence can inspire customers to see an SR as a social entity, it also mediates HRI. Consider the relationship between service provision and customer satisfaction: even if a certain type of service provider does not directly affect customers, its influence can be indirectly transferred to customers through social presence (van Doorn et al., 2017). Put simply, people gather social cues from HRI to identify the level of social presence, form an impression of the target object, and evaluate associated perceptions (e.g., the SR’s credibility and personal trust in the SR). Therefore, we expect social influence factors (i.e., communication ability and commensality) to inform individuals’ SR adoption through social presence:
Dining Experiences and SR Adoption
Customers’ experiences mold their behavior in the service industry, whether through direct participation or observation (Jain et al., 2017). This phenomenon has also been researched in terms of HRI in restaurants (Ali et al., 2025). High-quality restaurant experiences typically enhance diners’ satisfaction (Manhas et al., 2024) and affect their behavioral intentions, such as revisit decisions (Guan et al., 2022; Öksüz et al., 2025; Tsaur et al., 2024). The level of humanness in experiences affects customers’ interaction-related satisfaction (Fox & Gambino, 2021; Mende et al., 2019). We thus expect people with stronger perceptions of social influence to react more positively toward SRs (akin to interacting with human service providers), which should improve these individuals’ experiences overall.
Social presence and the customer experience are usually studied together in the HRI context because one must interact with a target object (either directly or indirectly) to sense social presence; the customer experience develops throughout this process (Čaić et al., 2020; van Doorn et al., 2017). Research has demonstrated the relationship between social presence and HRI experiences as well as both factors’ effects on people’s robot adoption (Chen et al., 2024; van Doorn et al., 2017). Extending this line of research, it is also conceptually critical to explore whether either factor is notably important, or both factors are equally essential and affect customers as the level of social influence increases. Therefore, we attend to how people’s perceived social presence and dining experiences with SRs inform SR adoption under varying degrees of social influence based on social factors:
Interactive Experiences and SR Adoption
The social relations literature has described service interaction as a core means of influencing people’s behavior (Henderson et al., 1980; Millar & Millar, 1996). As a primary social factor, interaction represents a process of reciprocal influence among individuals (Henderson et al., 1980). It normally transpires during face-to-face encounters of a particular duration and can influence customers’ service-oriented satisfaction and experiences (Gazzoli et al., 2013). Nass and Moon (2000) identified interpersonal interaction as a societal value; thus, people presumably receive and apply social cues to form perceptions when interfacing with SRs.
Research on HRI has indicated that individuals report more favorable interactive experiences with robots after personally engaging with these agents (Begum et al., 2025; Müller-Abdelrazeq et al., 2019), which introduces higher social presence (Chen et al., 2024; Shin & Choo, 2011). SRs’ sophisticated social capabilities (e.g., in tone of voice and use of gestures) can enrich the interactive experience and foster SR adoption (Tuomi et al., 2021). Perceived social presence can lead directly to relational outcomes (e.g., rapport and trust) and indirectly to usage intentions (Kim et al., 2022). People seem particularly willing to interact with highly sociable humanoid robots (Liu et al., 2025). More anthropomorphic robots can boost social recognition, thereby improving customers’ attitudes and intentions to revisit restaurants (Ruiz-Equihua et al., 2023).
However, interaction does not guarantee positive experiences. People have been found to express negative attitudes after interacting with SRs that have low social capabilities (Mende et al., 2019). Since an SR’s degree of sociability can hence determine users’ interactive experiences, a direct and physical interaction with a well-designed SR is apt to create more social cues and thus enhance people’s perceptions of SRs. In this research, we operationalize interactive experience based on the quality of interaction, referring to consumers’ perceived level of excellence during service provider encounters (Brady & Cronin, 2001). We speculate that when customers interact with SRs directly (i.e., as a primary user) in a context featuring high social influence, the encounter will yield stronger social presence and a more favorable interactive experience compared with indirect interaction (i.e., as a bystander):
We also examine the roles of social presence and interactive experience in settings with high social influence. Both factors affect people’s SR adoption (Molinillo et al., 2023). The decision-making process (in terms of the aspects that customers consider and why) has been somewhat neglected in relevant research. By adding interaction as another social factor, we contend that an SR will be deemed to have a social identity when customers perceive rich social influence and interact directly with a robot that has social capabilities. An SR’s social presence may then translate to interaction quality: this transmission process conveys people’s perceived level of excellence during the interactive experience and is the principal metric by which customers appraise their attitudes and revisit intentions toward service providers in a regular service context (i.e., human-to-human). The following hypothesis applies:
Indirect interaction is thought to affect people as well. Fazio et al. (1983) discovered that, for bystanders who only watched the primary interactors play in puzzle games, this indirect interactive experience could influence the observers’ attitudes. An HRI study more recently came to similar conclusions: Green et al. (2022) found that in a human–robot game, primary users evaluated the robot more favorably and as more competent than bystanders did. Accordingly, we anticipate that indirect interaction will affect customers’ social presence, interactive experiences, and SR adoption. Bystanders only watch primary users interact with an SR; these individuals therefore have less social interaction with, and receive less information from, the robot. We hence expect bystanders to evaluate SR adoption based on perceived social presence rather than interactive experiences:
Methodology
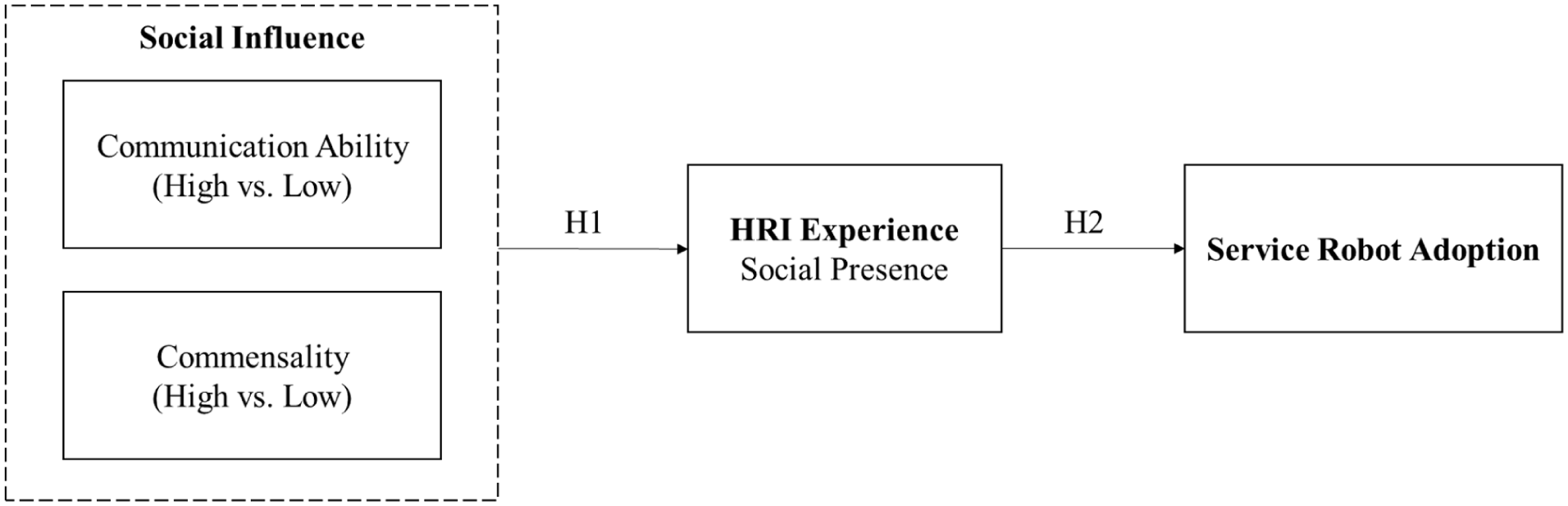
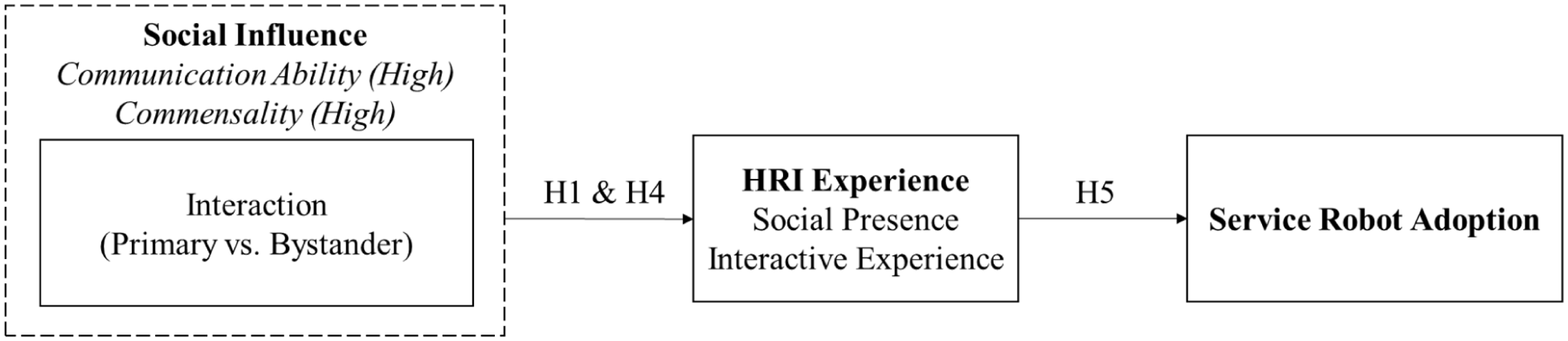
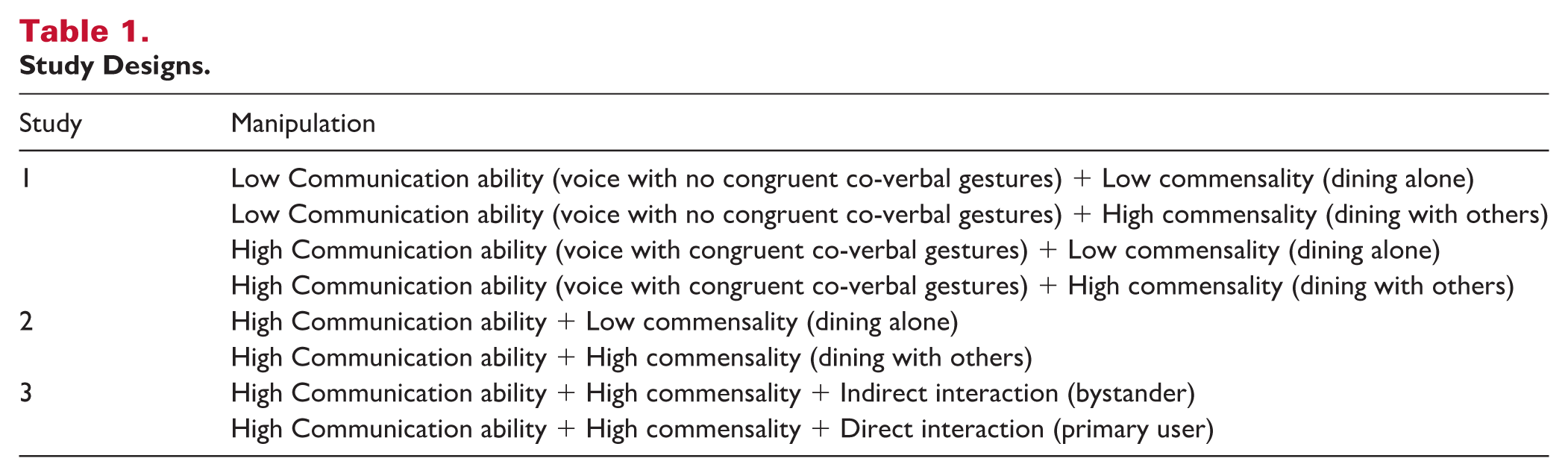
We conducted three interconnected studies with manipulations to investigate our hypotheses, consisting of two online experiments (Studies 1 and 2) and one field experiment (Study 3). Informed by social impact theory, we identified social influence’s role in HRI by (a) studying the impacts of three social factors, namely communication ability, commensality, and interaction; and (b) assessing the effects of the social source’s strength by manipulating the strength of the proposed social factors. In Study 1, we tested H1a, H1b, H2a, and H2b (Figure 2). Study 2 was intended to reaffirm H1 and to test H3a and H3b (Figure 3). In Study 3, we addressed H4, H5a, and H5b and re-examined H1 (Figure 4). Table 1 outlines our experimental manipulations.
Study 1.

Study 2.
Study 3.
Study Designs.
Study 1
Research Context and Design
A 2 (communication ability: high vs. low) × 2 (commensality: high vs. low) between-subjects experimental design was employed to measure the impacts of social influence. Based on the extant literature, we defined an SR’s communication ability as a combination of verbal and co-verbal gestures (Salem et al., 2013; Saunderson & Nejat, 2019); commensality was conceptualized as the level of interactive social contact with others in a dining situation (Sobal & Nelson, 2003).
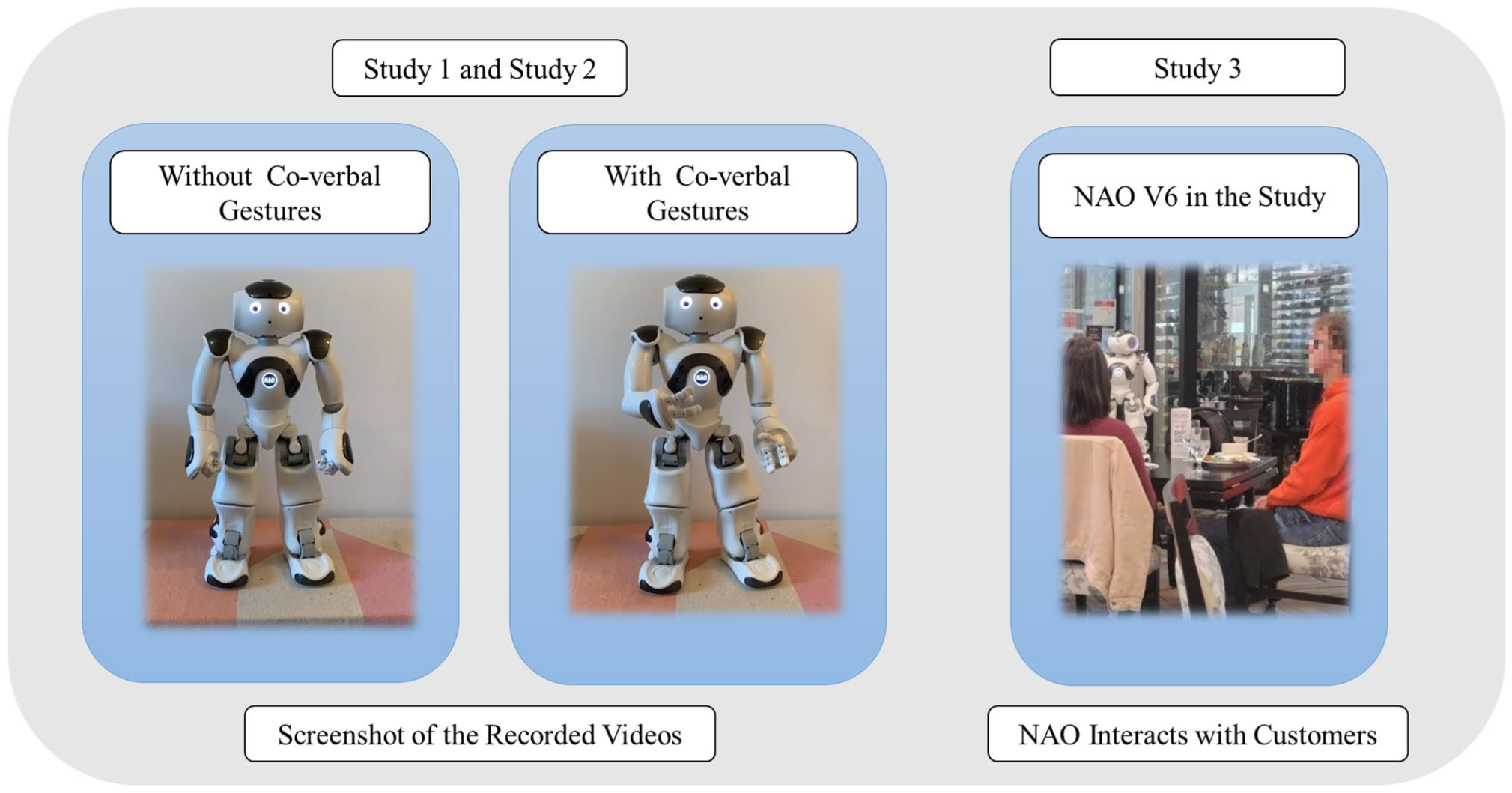
This experiment included a scenario-based online survey because this approach allows for better control and has been widely adopted in previous work (e.g., Kao, 2025; Mende et al., 2019). An SR named “NAO” was used in our study. NAO is a humanoid and programmable robot designed by SoftBank Robotics as a companion robot. It can listen to and talk to people as well as perform different movements. NAO permits researchers to install commands in it to execute tasks and react to participants’ questions and requests; it has been employed in research and industry (e.g., restaurants and hotels). We employed an interactive survey method (Dolnicar, 2013) to improve participants’ survey experience and obtain high-quality data. Specifically, we recorded multiple videos so that participants could interact with NAO based on the questions posed (see Figure 5).
Study Demonstrations.
We recruited 300 participants (34% women) who resided in the United States and offered them $1 as compensation via an online research panel (Prolific). Participants were first asked to report their demographic characteristics such as age and gender. Next, they were randomly assigned to one of the two commensality conditions (i.e., they went to a restaurant either alone or with a companion) and one of the two communication ability conditions (i.e., voice with or without physical gestures).
In the first recorded video, NAO introduced itself to the participants (i.e., “Hello, welcome to the Global Buffet at Taylor’s restaurant. My name is NAO, your robotic assistant . . .”) and gave an overview of the restaurant (e.g., “First, let me introduce the restaurant to you. Taylor’s restaurant is fully operated . . .”). In the second video, NAO mentioned the restaurant’s beverages (i.e., “We have fountain drinks like Coke, Sprite, and Dr. Pepper, as well as sweet tea . . .”), and participants were directed to choose a beverage after viewing the video. Next, NAO presented the main menu (i.e., “For the entrée, we have roasted beef . . .”), and participants were asked to place an order. In the final video, NAO acknowledged participants’ choices and thanked them for ordering (i.e., “Great choice, your order will be ready soon . . .”).
After viewing the given recordings, participants responded to questions about NAO, including its social presence and SR adoption. Participants also completed a manipulation check about whether they considered NAO akin to a human with social influence (i.e., “I feel the robot assistant is sociable”).
Measures
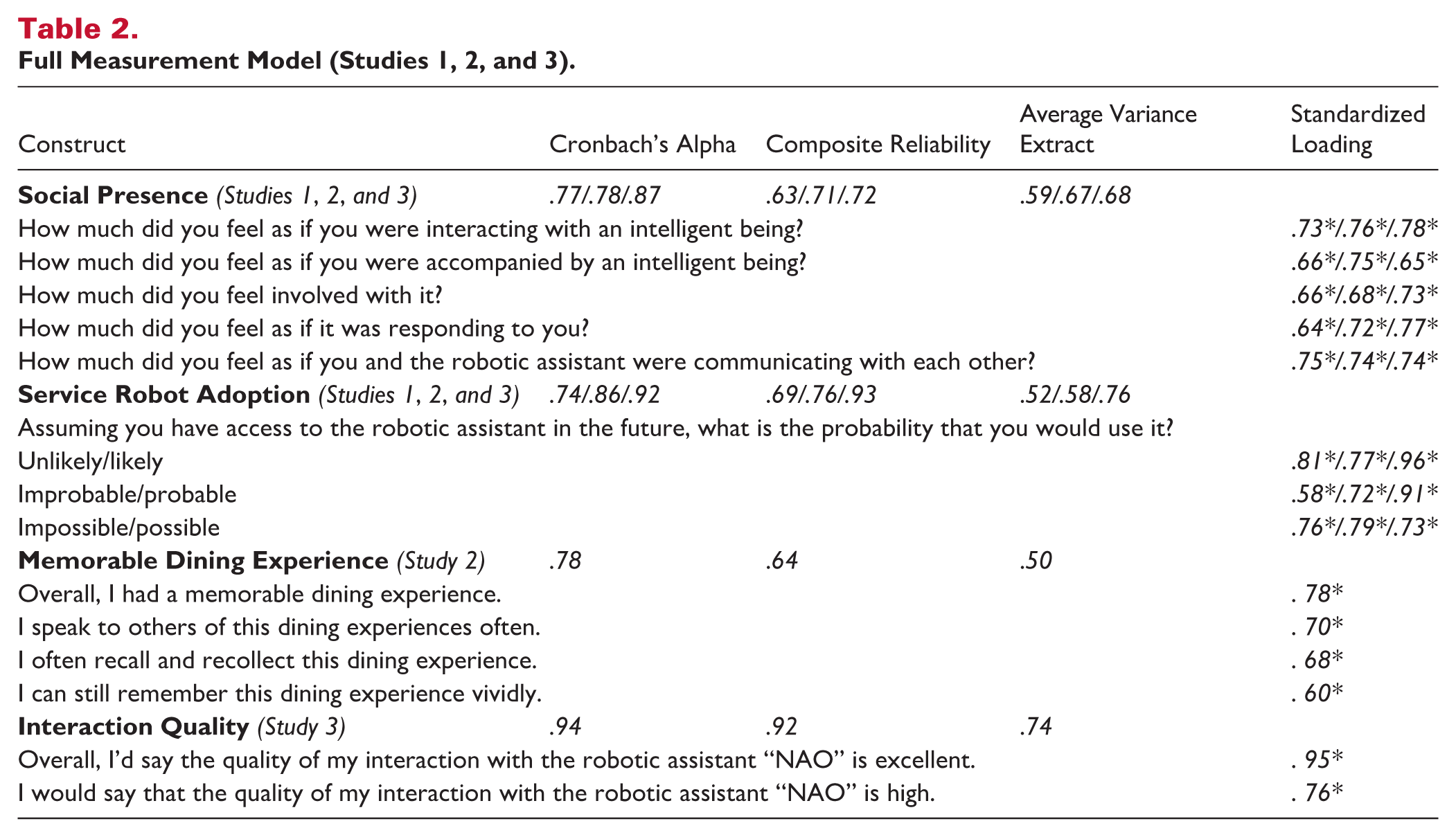
To assess NAO’s perceived presence, we used Lee et al.’s (2006) scale and asked participants to indicate the extent to which they felt as if they were interacting with a real social entity (α = .77). We assessed SR adoption by adapting MacKenzie et al.’s (1986) scale on SR adoption intention (α = .74). Table 2 contains the complete measures.
Full Measurement Model (Studies 1, 2, and 3).
Manipulation Check
We conducted a two-step manipulation check to confirm our experimental manipulation’s validity. First, participants were asked to recall whether they had been served by an SR who communicated with or without gestures and whether they experienced the service situation alone or in the presence of others. These questions were intended to ensure that the assigned experimental conditions were perceived by the participants as expected. Chi-square tests revealed significant associations between the manipulation situations or participants’ perceived situations [communication ability: χ2(1) = 28.51, p < .01; commensality: χ2(1) = 15.21, p < .01]. The manipulation check on socialness showed that participants considered NAO more sociable in the high (vs. low) communication ability condition [Mhigh = 5.52, SD = 1.52 vs. Mlow = 5.14, SD = 1.23; F(1, 298) = 4.75, p < .05, hp2 = .02] and in the high (vs. low) commensality condition [Mhigh = 5.46, SD = 1.48 vs. Mlow = 5.09, SD = 1.28; F(1, 298) = 3.01, p < .05, hp2 = .01]. These outcomes confirmed our manipulations’ effectiveness.
Hypothesis Testing
Main Effects of Communication Ability and Commensality
A 2 (communication ability: high vs. low) × 2 (commensality: high vs. low) between-subjects analysis of variance on social presence, which controlled for participants’ previous experiences using self-service kiosks (yes vs. no) and SRs (yes vs. no), demonstrated significant main effects. Participants in the high communication ability condition reported sensing more social presence than those in the low communication ability condition [Mhigh = 5.50, SD = 1.31 vs. Mlow = 5.17, SD = .93; F(1, 294) = 6.98, p < .01, hp2 = .02]. Similarly, participants in the high commensality condition noted greater social presence than those in the low commensality condition [Mhigh = 5.47, SD = 1.19 vs. Mlow = 5.20, SD = 1.10; F(1, 298) = 5.01, p = .02, hp2 = .02]. These findings lent support to H1a and H1b.
Mediating Role of Social Presence
We conducted two mediation analyses (PROCESS Model 4; Hayes, 2017) to explore the mediating role of social presence. The first model included communication ability as the predictor, social presence as the mediator, previous experience with self-service kiosks and SRs as covariates, and SR adoption as the dependent variable. As expected, with a higher level of communication ability, NAO’s social presence (b = .36, 95% confidence interval [CI] = [.11, .62]) significantly affected participants’ SR adoption. The second model, with commensality as the predictor, uncovered a significant mediating effect of high commensality through social presence on SR adoption (b = .25, 95% CI = [.00, .50]). These results confirmed H2a and H2b.
Study 2
Research Context and Design
Similar to Study 1, Study 2 involved an interactive online survey with recorded videos. Based on the results of our preceding study, we manipulated commensality (high vs. low) with communication ability being held at a high level. In the high commensality condition, participants were instructed to imagine that they had gone to a restaurant with several friends. In contrast, in the low commensality condition, they were instructed to imagine that they had gone to the restaurant alone. Both conditions used the same recorded videos. This approach enabled us to compare the effects of social presence and the dining experience on SR adoption between the two social influence conditions. Data were obtained via an online research panel, and participants (N = 279; 113 women) received $1 as compensation. Participants provided their demographic information and were then randomly assigned to one of the two conditions (commensality: high vs. low) and asked to watch a series of videos about an SR (NAO) speaking and introducing the menu to them. After that, they were asked to evaluate NAO’s social presence, SR adoption, and their dining experience. They also completed a manipulation check.
Measures
Consistent with Study 1, we used Lee’s et al. (2006; α = .78) scale and MacKenzie et al.’s (1986; α = .86) scale to measure perceived social presence and SR adoption intention, respectively. Next, because this experiment was conducted in a restaurant setting, participants’ dining experiences were evaluated with four items from the memorable dining experience scale (Cao et al., 2019; α = .78; see Table 2).
Manipulation Check
The results of the first manipulation check showed a significant association between the manipulation and participants’ perceived situation [χ2(1) = 9.07, p < .01]. Participants also deemed NAO more sociable in the high (vs. low) commensality condition [Mhigh = 5.64, SD = 1.43 vs. Mlow = 5.37, SD = 1.19; F(1, 277) = 3.78, p < .05, hp2 = .01]. Our manipulation was thus effective.
Hypothesis Testing
Main Effect of Commensality
A univariate analysis (commensality: high vs low) on social presence, controlling for participants’ previous experience with self-service kiosks and SR, displayed a main effect of commensality: individuals in the high commensality condition perceived higher social presence than those in the low commensality condition [Mhigh = 3.97, SD = .71 vs. Mlow = 3.80, SD = .62; F(1,275) = 4.69, p = .03, hp2 = .02]. This pattern implies that a high level of commensality can introduce stronger social presence. H1 was therefore reaffirmed.
Mediating Roles of Social Presence and Dining Experience
To further examine the proposed relationships, we conducted a mediation analysis (PROCESS Model 4; Hayes, 2017) with commensality (high vs. low) as the predictor, social presence and the dining experience as mediators, and SR adoption as the dependent variable. We controlled for participants’ prior experience with self-service kiosks and SRs as we had in previous analyses. In the low commensality condition, social presence (b = .37, 95% CI = [.09, .65]) and the dining experience (b = .20, 95% CI = [.01, .40]) each significantly influenced participants’ SR adoption. The dining experience had a strong and positive effect on participants’ SR adoption in the high commensality condition (b = .37, 95% CI = [.18, .57]); however, social presence did not appear to affect adoption (b = .18, 95% CI = [−.08, .44], p = .19). These findings supported H3a and H3b.
Study 3
Research Context and Design
We carried out a field experiment to further investigate participants’ SR perceptions and to test our hypothesized model. We chose to complete a field experiment because it provides a clearer sense of the studied factors’ impacts while conferring lower bias and higher external validity; it also suggests real-life causality due to its natural setting (Bart et al., 2014). We manipulated interaction (primary user vs. bystander) to evaluate customers’ interactions with NAO, an autonomous humanoid robot capable of listening to and conversing with customers. NAO was selected over food delivery robots, such as X1, because this study focused on the social dimension of HRI rather than utilitarian functions. Besides its applicability in the restaurant context, NAO has been tested as a concierge by Hilton Hotels & Resorts and as an airport information provider at Haneda Airport in Tokyo, Japan. We considered NAO to be conceptually and practically suitable in our case, given this study’s main objective. Customers could interact with the SR directly in the primary user condition (e.g., by talking to it and playing with it); in the bystander condition, customers could only watch others interact with it at the same table. We adapted a manipulation of the highest social influence condition (i.e., congruent co-verbal gestures and high commensality) and explored the manipulated effects of interaction isolated in a high social influence condition.
This field experiment was conducted in a full-service restaurant at a university in the United States. NAO interacted with participants as an SR server (see Figure 5). The selected restaurant is open to the public, and the customer population represents the diverse demographics of a college town. We recruited participants by randomly approaching customers in groups of two. We then provided an overview of the study and asked whether they would be willing to take part in it. Upon receiving participants’ consent, they were led to their seats, assigned their roles (i.e., primary user or bystander), and introduced to NAO. First, NAO orally greeted the primary user and introduced itself and the restaurant. It then welcomed the participants to the restaurant and explained the beverage menu. After this initial introduction, NAO helped take the primary user’s beverage order and stayed at the table to interact with the primary user and answer any questions they had. This procedure was designed to elicit firsthand HRIs; participants likely had varying levels of experience with SRs, which enhanced the study’s ecological validity. Pilot results showed that the manipulation lasted an average of about 11 minutes before participants proceeded to the online survey: as the participants finished their meals, they were asked to scan a QR code to answer a series of questions. This survey captured the customers’ perceived social presence, interactive experiences with NAO, and SR adoption; a manipulation check was included as well. Participants received a restaurant voucher worth $12.50 upon completing the experiment. A member of the research team was present throughout data collection to oversee the field experiment, communicate with the primary user regarding commands for NAO, ensure instructions’ accuracy, and generally facilitate the experimental process. A total of 107 participants (70 women) provided useful data, in line with the recommended sample size for field studies (Malodia et al., 2023). Most participants (73%) were between ages 18% and 29, 17% were between 30 and 39 years old, and 10% were over age 40.
Measures
We evaluated customers’ social presence and SR adoption via scales from Lee (2006; α = .87) and MacKenzie et al. (1986; α = .92). Participants’ perceived interactive experience with the SR was measured using the adjusted interaction quality scale (Brady & Cronin, 2001; α = .94; see Table 2).
Manipulation Check
A chi-square test indicated no significant difference between the manipulation condition and participants’ perceived condition [χ2(1) = 0.31, p = .58]. The primary users who directly interacted with NAO (vs. the bystanders) saw this SR as more sociable [Mprimaryuser = 5.63, SD = 1.56 vs. Mbystander = 5.00, SD = 1.19; F(1, 106) = 7.07, p < .01, hp2 = .06]. Thus, our manipulation was valid.
Hypothesis Testing
Main Effect of Direct Interaction
A multivariate analysis of variance (primary user vs. bystander), controlling for customers’ previous experience using self-service kiosks and SRs, revealed main effects of direct interaction on social presence. In particular, primary users reported higher social presence [Mprimaryuser = 4.62, SD = .86 vs. Mbystander = 4.06, SD = 1.02; F(1, 103) = 8.66, p < .01, hp2 = .08] and a more interactive experience [Mprimaryuser = 5.52, SD = 1.01 vs. Mbystander = 4.59, SD = 1.20; F(1, 103) = 23.20, p < .01, hp2 = .18] than bystanders. H4 was therefore confirmed. These results also reaffirmed H1: as the level of social influence increased, so did perceived social presence.
Mediating Roles of Social Presence and Interactive Experience
Consistent with Study 2, we completed a mediation analysis (PROCESS Model 4; Hayes, 2017). Direct interaction (primary vs. bystander) was taken as the predictor, social presence and interactive experience as mediators, customers’ prior experience with self-service kiosks and SRs as covariates, and SR adoption as the dependent variable. Interactive experience had a significant positive effect on SR adoption for primary users (b = 1.59, 95% CI = [.12, 3.06]), whereas the impact of social presence was not significant (b = 1.10, 95% CI = [−.01, 2.30], p = .10). H5a was confirmed as such. As for bystanders, neither perceived social presence (b = .98, 95% CI = [−.21, 2.16], p = .11) nor interactive experience (b = .21, 95% CI = [−.94, 1.38], p = .72) influenced their SR adoption. H5b was hence not supported.
Discussion
This research examines how social influence affects people’s HRI experiences and adoption. We found that consumers’ perceived social presence of the SR developed once they experienced a certain degree of social influence and was significantly greater under conditions of high social influence. These outcomes suggest that social influence affords people social information and helps build social presence, which guides their SR adoption. More importantly, we contest Reckwitz’s (2018) claim that “sociality” is exclusively transmitted through human-to-human interaction by providing preliminary evidence that meaningful social dynamics can also emerge in human–thing relationships—particularly in interactions with SRs.
We additionally noticed that social presence did not influence participants’ SR adoption in the high social contact setting. Customers’ dining experiences instead contributed to this effect. Because social presence entails an impression of the proposed object, scholars have asserted that people’s sense of social presence represents the object’s social image and their level of engagement with that object (van Doorn et al., 2017). Thus, in situations characterized by high social influence, an SR could logically be seen as a form of social identity: individuals have a lesser need to establish a social image of the SR when receiving sufficient social information.
Finally, consistent with our hypothesis, primary users reported more perceived social presence from and interactive experiences with the SR than bystanders. Direct interaction therefore had a positive impact. The actual interactive experience guided primary users’ SR adoption, with the SR being a more dominant aspect than perceived social presence. We argue that when customers encounter robust social influence, they will respond as if they are interacting with human servers. The impact of the interactive experience between customers and the service provider will then be used to gauge customers’ attitudes toward the provider and their revisit intentions (Gazzoli et al., 2013). Interestingly, neither perceived social presence nor interactive experiences informed bystanders’ SR adoption. This result did not fully support our hypothesis but was consistent with our assumption that customers’ level of interactive experience would shape their intentions when reacting to services in a regular service setting. Bystanders’ perceived image and interaction quality toward the SR was not expected to affect SR adoption because the interaction was limited. In other words, without direct interaction (i.e., when only watching as a bystander), consumers’ perceived social presence and interactive experiences with the SR had limited effects on SR adoption.
Theoretical Implications
This research offers several theoretical contributions. First, it represents a step forward in empirically testing how levels of social influence operate in HRI by extending social impact theory. We examined social factors’ roles in customers’ experiences. Building on earlier efforts (e.g., Buduneli, 2020; Liu et al., 2025), we integrated several such factors (e.g., co-verbal gesture communication abilities and commensality) and measured their impacts on the development of social presence. We also considered how these effects influenced customers’ SR adoption. Our findings complement studies in this vein (e.g., Jang et al., 2024; Li & Larivière, 2023) by showing that the degree of social influence enhances HRI and strengthens consumers’ willingness to adopt SRs in the restaurant setting. These results serve as initial experimental evidence of how distinct dimensions of social influence jointly mold HRI outcomes.
Second, we have enriched the SR literature by exploring how HRI experiences affect customers’ responses to SRs. Scholars have emphasized perceived social presence as a main driver of these experiences (e.g., Flavián et al., 2024; Himanshu Goel et al., 2025; Kim et al., 2022; van Doorn et al., 2017). Our findings imply that its influence is in fact conditional. In short, customers exposed to low levels of social influence rely on perceived social presence as a principal decision-making aid. However, the need for social presence diminishes as the level of social influence increases: customers start making judgments based on firsthand experience (e.g., Ali et al., 2025) with the SR instead of on an imagined or projected image of the robot. This tendency casts new light on the prevailing belief that social presence is the dominant pathway in HRI; customers’ dependence on social presence rather seems to differ with the degree of social influence that exists in a given context.
Third, we have expanded the literature by describing how direct interaction functions in human-to-human and human-to-robot service encounters (e.g., Liu et al., 2025) when high social influence is present. Our field experiment highlighted direct interaction as the key factor behind consumers’ perceptions of SRs. Bystanders who engaged only in indirect interaction expressed little or no interest in adopting SRs either currently or in the future. These patterns imply that in cases of high social influence, consumers appraise interactions with SRs in ways that are strikingly similar to their evaluations of human servers. Our research thus theoretically bolsters the HRI literature (e.g., Chen et al., 2024; Liu et al., 2025) by demonstrating that customers employ distinct strategies for assessing and using SRs depending on the social setting. These insights have deepened our understanding of how social influence shapes HRI, underlining the need to account for situational factors when contemplating SR adoption.
Finally, many other studies on SRs and HRI have simulated customer–SR interaction via online, text-based scenarios (e.g., So et al., 2024). A defining limitation of such designs is their restricted ability to convey authentic social interaction (Mende et al., 2019). Given our focus on social factors in SR adoption, we opted for novel strategies to foster social interaction. We specifically answered calls from robotics research (e.g., Kao & Huang, 2023; Mende et al., 2019) to address real-world settings: we recruited walk-in restaurant customers and invited diners to interact with the SR, NAO, as if it were a human server. This approach enabled us to meaningfully manipulate social factors and to capture participants’ genuine reactions to subtle social cues after SR interaction. Our results are therefore grounded in participants’ personal experiences.
Practical Implications
High employee turnover in the restaurant industry, which the post-pandemic great resignation exacerbated, has spurred interest in SR adoption. Our research offers evidence-based guidance for restaurant managers applying these technologies. Social presence emergence was found to be conditional on adequate social information, suggesting that implementation strategies should be stratified across service contexts. For instance, full-service establishments require more sophisticated solutions: advanced SRs can be adopted at upscale restaurants to display nuanced facial expressions and engage in context-aware conversations that complement the dining experience. Social influence also significantly affects SR acceptance and opens clear implementation pathways for restaurant managers. In full-service environments with ample social cues, restaurateurs should strive to create memorable interactive experiences.
Relatedly, direct interaction is crucial for SR adoption. Our research shows that customers developed positive attitudes only when directly engaging with robots. Restaurants should construct deliberate “first contact” protocols to ensure every diner has a meaningful social exchange with the SR. Practically, tiered interaction strategies can accommodate varied comfort levels with technology; customers may choose their preferred degree of SR engagement and gradually increase their familiarity over successive visits.
Our findings on commensality reveal that group dynamics significantly influence SR perception. Restaurants can leverage this impact through strategic table management. For example, seating first-time SR users near tables with repeat customers who are already comfortable with robotic service would promote social influence that enhances adoption through observational learning. For community-style dining, introducing “robot service sections” could maximize the social amplification effect we identified while ensuring that primary and secondary customers both receive sufficient social interaction to fulfill their expectations for human–robot service.
In summary, our findings provide a roadmap for restaurant managers to use SRs in real-world settings. Firsthand, superior HRI experiences can drive adoption. SR deployment should be adapted to the occasion and the level of social influence, with seating arrangements being optimized to maximize engagement. These practices can help managers navigate challenges in the fast-evolving, highly competitive restaurant industry while capitalizing on the opportunities that SRs offer. Powered by technological advances and service innovation (Huang et al., 2025; So et al., 2023; So & Li, 2023), the vision of robots serving customers—once only seen in science fiction or Star Wars—has become a reality that is reshaping dining experiences specifically and hospitality operations more broadly.
Limitations and Future Research
Several limitations of this research provide directions for future studies. The first issue concerns the chosen SR’s functionality: NAO possesses strong companionship skills and is one of the most advanced companion robots for service, but it is too small to deliver food. In our case, NAO interacted with customers and took orders, after which human staff completed the service experience. An SR combining delivery with advanced social interaction features was not available at the time of data collection. Subsequent research could explore integrating the functions of a companion robot (e.g., NAO) and a delivery robot (e.g., X1) to develop a more human-like robotic server. The results may further validate our findings in field settings and offer more generalizability. The second constraint involves the source of social influence. We accounted for popular social factors, but other aspects should be considered as well (e.g., the SR’s emotions and facial expressions, dining companions’ relationships, and varied service settings). Finally, it remains necessary to evaluate when customers’ SR adoption strategies move from social presence to the actual experience. The median level of social influence in this research largely led participants to use social presence and experience to determine adoption behavior. Experience became the dominant tool as the extent of social influence rose. Follow-up work can investigate these boundaries as well as customers’ decision-making processes to specify why certain degrees of social influence affect people.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, or publication of this article: This paper was funded by the Harrisburg University of Science and Technology PRG research grant 2021
Declaration of Conflicting Interests
The authors declared no potential conflicts of interest with respect to the research, authorship, or publication of this article.