
Abstract
This study aims at the flexible landing control problem of vertical take-off and landing UAV. A control method based on Model Reference Adaptive Control (MRAC) is designed and verified to ensure the stability of the UAV when landing on the moving platform and reduce control errors and dynamic instability caused by bouncing. By establishing a mathematical model including landing gear stiffness and damping parameters, and combining it with MRAC for adaptive parameter adjustment, the system can adapt to different landing conditions in real time, ensuring the stability and feasibility of flexible landing. This study conducted experimental tests on multiple sets of stiffness and damping parameters and analyzed the effectiveness of the MRAC control strategy under different configurations through numerical simulation. Experimental results show that when the stiffness and damping configuration are appropriate, MRAC can quickly adjust the control parameters, so that the time domain response characteristics of the UAV tend to be stable when landing, and the loss function shows a decreasing trend, proving that the control method has good convergence characteristics and adaptability. This study analyzes the MRAC parameter adjustment process through game theory and proves that the system can achieve Nash equilibrium under certain conditions, making each landing gear control strategy optimal and further improving landing stability. In order to verify the feasibility of MRAC control in practical applications, this study also considered the effects of sensing errors and random noise. The results show that the method can still successfully converge, demonstrating its robustness under different environmental conditions. This study confirms the applicability of MRAC in the flexible landing control of UAV and provides a theoretical basis for the future development of dynamic stiffness and damping adaptation mechanisms.
Introduction
In recent years, the design of landing gear in the application of small UAV has gradually received attention because it is directly related to the safety and performance of UAV. When faced with uneven ground or emergencies, traditional rigid landing gear can easily cause the structure of the drone to be damaged or overturned, thus affecting the smooth completion of the mission. Flexible landing can effectively absorb the impact force during landing and reduce the stress on the drone body, thus improving its durability and stability. Many studies have been devoted to improving the design of the landing gear of small UAV, including innovative solutions such as adaptive passive landing gear and inflatable airbag landing gear. The adaptive passive landing gear can automatically adjust according to changes in the landing terrain to improve landing stability, while the inflatable airbag landing gear slows down the impact through inflation and adapts to different terrains and landing conditions. These designs not only improve the survivability of UAV in complex environments, but also allowing them to perform more diverse tasks. As drone technology continues to advance, the demand for flexible landing will become higher and higher.
In 2019, Luo, et al. proposed a soft-landing device that imitates birds landing on uneven surfaces, combined with a neural network control method. 1 Using a quadcopter helicopter consisting of a flight unit and a landing assist unit, a new soft mechanism is designed to absorb the remaining landing impact force. The control strategy is based on a dynamic model and applies a backstepping controller to achieve the desired trajectory. In 2007, Batterbee, et al. 2 proposed an innovative method of semi-active damping using magnetorheological fluid to solve the conflicting damping needs of aircraft landing gear under different excitation conditions, optimize the damping performance and magnetic circuit performance of the landing gear, and comply with space constraints, which is of great significance for commercial applications. Kyle, et al. 3 pointed out that flexible landing can effectively absorb energy during landing and braking, reduce aircraft structural stress, and improve safety and reliability. Zbigniew outlines general design solutions and installation methods for landing gears, 4 emphasizes the load function and calculation methods of oil and gas shock absorbers, and covers the requirements for shock absorber design basics, materials used and future developments. In 2001, Jocelyn. emphasized the importance of flexible landing in reducing landing impact and vibration. 5
The flexible landing device can effectively absorb landing energy, reduce aircraft structural stress, and improve safety and reliability. It provides stable support under different ground conditions, ensuring a stable landing of the aircraft, while reducing the weight of the landing gear and minimizing air resistance, making flexible landing crucial in aircraft design. In 2012, Elsa et al. introduced a flexible landing control method, which used a spring-deploying claw mechanism to allow the quadcopter to dock on a tree-like structure. 6 Flight tests proved its effectiveness in improving landing stability on complex terrain. In 2021, Chinvorarat and Vallikul introduced a retractable light amphibious aircraft main landing gear. An additional locking link was added to the design to ensure stability. 7 The oil and gas shock absorber strut absorbs impacts and reduces the force requirements for the retractable linear actuator. In 2023, Wang, et al. developed a three-dimensional flexible landing dynamics theoretical model and its numerical solution process. 8 The model considered the six-degree-of-freedom motion of the center of mass offset setting and the spatial motion of each landing gear. In 2021, Liang, et al. discussed the popularity of UAV in various applications, emphasizing the importance of appropriate landing gear for safe takeoff and landing. 9 Wang, et al. pointed out that UAV landing gear plays a key protective role in small UAV with short endurance and poor landing performance. 10 Wang, et al. proposes an inflatable UAV landing gear to address the shortcomings of existing designs, enhancing protection for small UAV in complex environments. Wang, et al. created a fast and universal mechanism design and optimization method, 11 conducted a comprehensive analysis of mechanisms with different numbers of components, and proposed a characterization method to achieve generalized kinematics simulation of complex mechanisms, and applied particle swarm optimization algorithms to optimize mechanism parameters, demonstrating the superiority of this method in the design of landing gear mechanisms. Khan, et al. 12 proposed a design, analysis and topology optimization method for the solid blade spring landing gear of a quadcopter. The landing gear supports and absorbs the aircraft weight and impact load under static and dynamic conditions. Gan, et al. proposed a relationship between light aircraft landing gear strut friction and landing performance, using drop tests and response surface methods for multi-objective optimization. 13
Yin, et al. introduced a hexapod mobile lander, which combines the functions of a lander and a probe and has the ability to land repeatedly. 14 Dynamic modeling and numerical simulation analysis show its flexible landing capability on the 5-DOF lunar gravity test platform, providing a new perspective for lunar exploration equipment. Dong, et al. emphasized the importance of safe and flexible landing for Mars exploration missions 15 and pointed out the key role of uncertain terrain analysis in lander design. Traditional UAV have separate designs for the lander and detector, which increases launch costs and limits the detection range. In 2021, Ke, et al. also designed the hexapod mobile repetitive lander, 16 which combined active and passive compliance hybrid mechanisms and integrated drive units to propose a flexible landing control method based on a state machine. Nekoo, et al. studied the flexible landing problem of quadcopter, 17 using the induced wind model method. The experimental results show that the proposed method successfully reproduces the wind model and achieves flexible landing. Zhou, et al. established and optimized the buffering energy absorption and motion planning model, 18 verified the effective energy absorption of aluminum honeycomb and a three-level aluminum honeycomb buffer, and designed a motion gait and minimum jitter drive trajectory. Langberg, et al. developed a landing gear and landing system and emphasized its ability to land safely and autonomously in unfamiliar terrain and changing weather conditions. 19 Ding, et al. designed a variable stiffness leg based on a four-bar linkage mechanism. 20
Taking into account the design constraints of the landing gap, a numerical model for the probe landing simulation was established. The second-order response surface method was used to obtain an alternative model, improve computational efficiency and optimize the variable stiffness leg and pressure. Liang, et al. developed a new method for landing impact dynamic analysis using the nonlinear finite element method, 21 simulating a flexible landing event, establishing an aluminum honeycomb shock absorber and lunar soil model, and demonstrating the connection point load, structural acceleration response and absorbed energy. Huang, et al. 22 introduced the rapid development of UAV in the field of remote detection. They proposed a lightweight robot landing gear to enable the UAV to land on irregular surfaces. They used a vacuum system to fix the robot landing gear and used a movable counterweight to balance the flight. Only one servo motor and passive mechanical structure were used to guide the vacuum suction cup to adapt to different surfaces. Nihat pointed out that vertical take-off and landing rotorcraft cannot land safely on ground with excessive slopes, and fixed landing gear increases the risk of rollover. 23 An adaptive passive landing gear design and control scheme is proposed, which is suitable for low take-off weight quad-rotor drones and follows the principles of rapid adaptation to the ground, low cost and weight.
In recent years, there are still many studies in this issue due to the diverse development of drone types. Yin, et al. designs a multirotor UAV with adaptive landing gears for stable landings on complex terrains, introducing the “terrain envelope” concept to predict landing stability. 24 The findings show that increasing positive lateral landing velocity expands the stable landing region, enhancing UAV landing success on slopes. In 2024 Ganesan, et al. evaluates Borassus Flabellifer fiber-reinforced epoxy composites for UAV landing gear, analyzing mechanical properties, thermal stability, and moisture resistance. 25 In 2025, Dinc, et al. analyzes oleo-pneumatic shock absorbers for carrier-based UAV landing gear, 26 demonstrating their ability to withstand high-impact forces and improve vibration damping. Chen and Xue presents a hybrid optimization method combining BP neural networks and genetic algorithms to enhance UAV landing gear buffering performance. 27 Qiu, et al. presents an impedance-based parallel cooperative control method for the hydraulic landing gear system of large UAV, enabling controlled tilting for smoother cargo loading and unloading. 28 Perkasa, et al. analyzes the impact load resistance of a UAV's retractable main landing gear using finite element methods, confirming its safety at vertical landing speeds up to 6 m/s. 29 Chu, et al. designs an adaptive UAV landing gear inspired by the praying mantis, utilizing a four-bar mechanism and a laser range sensor to enhance landing stability. 30 Ghods, et al. proposes an adaptive UAV landing gear with a single-degree-of-freedom arm mechanism, enhancing stability on inclined surfaces. 31 Darmawan, et al. examines the application of pre-straining spring momentum exchange impact damper to landing gear, demonstrating that its active time prediction system effectively reduces shock vibration acceleration. 32 Widanto, et al. designs a landing gear drop weight test to evaluate impact resistance and deformation, aiding future research and development. 33 The test system, based on CASR 23 standards, utilizes gravity propulsion and analyzes structural deflection to ensure reliability. Wang, et al. introduces a dual-function landing gear with an actively closing mechanism for coaxial drones, enhancing grasping efficiency while reducing energy consumption. 34
Flexible landing technology is critical in aerospace, especially for UAV operating on complex terrain. Traditional systems relied on passive components like springs and shock absorbers, but advances in materials (e.g., composites, shape memory alloys) have enhanced performance. Recent research highlights motor-driven simulated damping systems, which adjust damping characteristics in real time based on aircraft and terrain conditions, offering better impact absorption and structural protection. Though still emerging, this approach shows strong potential for small UAV, addressing limitations of passive systems and enabling precise, adaptive control for safer, more reliable landings.
Therefore, this study aims at the flexible landing control problem of vertical take-off and landing UAV. A control method based on Model Reference Adaptive Control (MRAC) is designed and verified to ensure the stability of the UAV when landing on the moving platform and reduce control errors and dynamic instability caused by bouncing. By establishing a mathematical model including landing gear stiffness and damping parameters, and combining it with MRAC for adaptive parameter adjustment, the system can adapt to different landing conditions in real time, ensuring the stability and feasibility of flexible landing.
Methods analysis
This study first establishes the motion equation of the UAV body described by rigid body dynamics and Newton-Euler equations, as shown in (1). where

Considering that each landing gear in the flexible landing gear target model is driven by a motor to simulate elastic and damping characteristics, an ideal elastic damping system is constructed. As shown in (2), where

The controller is designed with three key objectives. During the landing process, the first is to avoid the landing gear from bouncing off the ground. The second is to avoid unknown platform motion states based on different environments. The third is to ensure that the drone lands smoothly when the above two conditions are met, that is, the rigid load limit of the system must not be exceeded. Therefore, for this condition, assume that the control of the UAV is a known best solution, that is, the attitude and landing trajectory of the UAV are optimal. This study adjusts the stiffness and damping of the four landing gears to adapt to the landing process. The four landing gear deployment expressions in (2) are simplified into ideal response models to facilitate the response process corresponding to the motor simulation.
As shown in (3) and Figure 1,

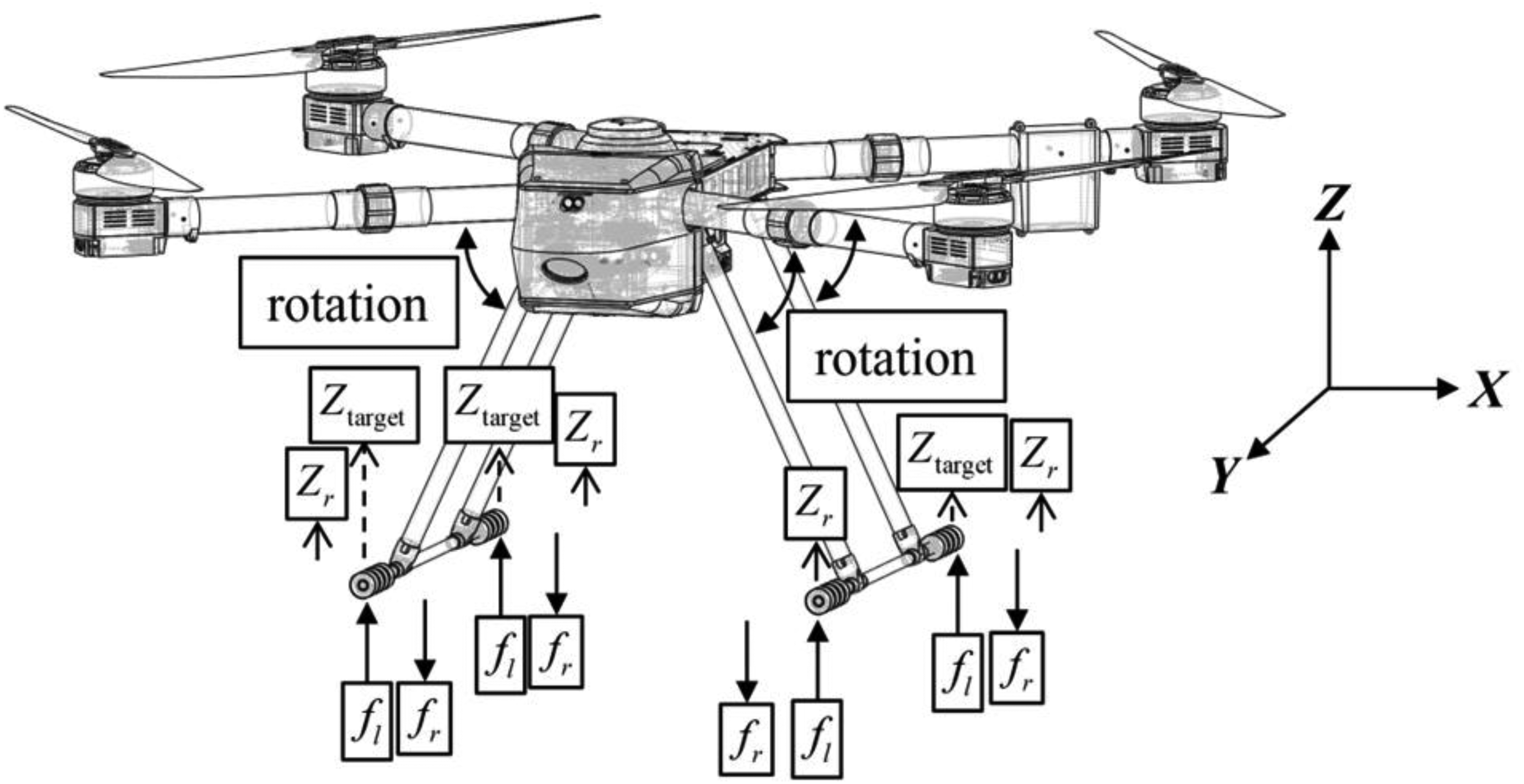
Parameters and coordinate of UAV landing system.
Based on (3), the errors of position, velocity and acceleration can be defined as

In the UAV landing system illustrated in Figure 1, each landing gear is equipped with spring-damper elements that are responsible for absorbing the impact energy during touchdown. To ensure a stable and flexible landing, the control strategy described by (4) employs a structure analogous to a Proportional-Derivative (PD) controller, enhanced with adaptive and feedforward dynamics. Specifically, the control force
According to (4), consider bringing in the Lyapunov function
35
and find its derivative, and choose the update law of

The Lyapunov function introduced in the MRAC framework for the UAV landing system plays a pivotal role in ensuring closed-loop stability and convergence during the adaptive control process. As expressed in (5), the Lyapunov function V incorporates three components: the kinetic energy-like term
The update process is implemented using MRAC through each complete landing process. The complete landing process includes three processes: starting of landing, buffering with current parameters after touching the ground, and stable stop. After the above three processes are completely executed, the MRAC parameters are updated according to the experiment, and the stiffness and damping are adjusted to ensure that the new landing can reduce more acceleration and negative displacement. In order to make each iteration of the convergence process tend to the target, a loss function is set as an indicator to measure the performance of the current iteration control system. The loss function is shown in (6),
36
where

The loss function of (6) mainly consists of three parts. The position error term
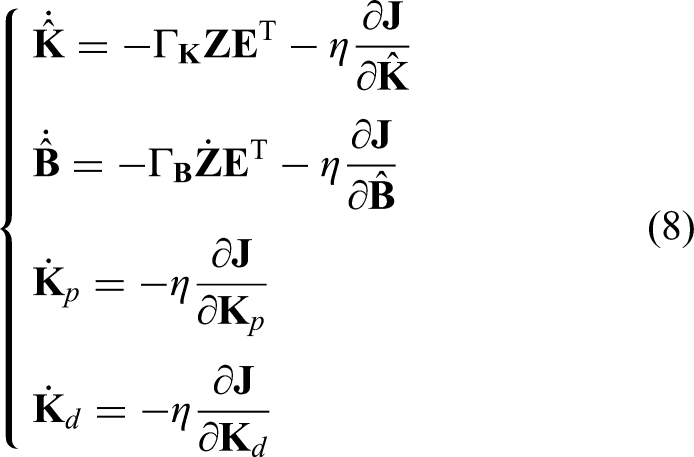
The parameters are updated through the gradient descent method of

In the context of the MRAC-based control strategy illustrated in the image, the arrow notation
After substituting gradient descent into the MRAC parameter update, it means that the update conditions of
Simplifying the process of (1) to (8), it can be expressed by Figure 2. After initializing the parameters, the experiment is conducted for each landing. Upon completion, the system state described in (4) and the parameter values from the previous experiment in (1) are feedback into the optimization iteration process defined in (7).

Optimization parameter process.
In order to avoid the problem of multiple optimal solutions during the convergence process, the target condition of this adaptive convergence process is designed as a non-cooperative dynamic game, in which the control outputs of the four landing gears can be regarded as strategies. The goal is to minimize landing errors and energy consumption while ensuring no bouncing phenomenon. The motor control strategy in the landing gear set (denoted as

From (9), the cost function is the sum of the utility functions of the landing gear, i.e.,

Based on (10), this control strategy optimization process must satisfy a condition that other players have no motivation to change



As the motor outputs of all landing gears at the Nash equilibrium point of

Based on the above strategy, the conditions for rebound bounce are analyzed to be that the normal force after contact is too large to produce upward acceleration and the damping force is insufficient to absorb kinetic energy. Based on non-smooth mechanics model dynamics and control analysis,
38
the control condition for a single landing gear is
Experiment analysis
The experimental design of this study is given in two parts: time domain response characteristic analysis and optimization process experimental analysis when the UAV (Figure 3) lands. The purpose of the experiment is to test the landing time domain response of the UAV under different initial conditions and control strategies and ensure three key points. The first is to land smoothly to avoid shock and bounce, the second is to minimize overshoot and steady-state errors during the landing process, and the third is to optimize the time for the system to converge to a stable state.

Proposed UAV system (a) equipped with experimental recorder and (b) its dimensions.
The first part establishes the analysis of time domain response characteristics during landing. The experimental variables are shown in Table 1. The adjustment range of MRAC adaptation gain
Constant physical quantity.

Each parameter in this UAV landing experiment plays a pivotal role in defining the dynamic behavior of the system and the subsequent performance of the MRAC control strategy. The UAV mass not only affects the platform's inertia during landing but also directly influences the impact forces experienced by the landing gear. Gravitational acceleration is incorporated as a constant to simulate real-world forces and to ensure that the dynamic model accurately represents weight-induced pressures during touchdown. The deck stiffness
The control parameters further refine the system's performance. The MRAC adaptation gain
A robust sensing and measurement framework is key to capturing these dynamic interactions. Integrated sensors such as high-frequency accelerometers, gyroscopes, and strain gauges are employed to continuously monitor the system during the landing process. Accelerometers record the deceleration patterns and impact forces, while strain gauges affixed to strategic points on the landing gear track deformation and load distribution in real time. Real-time data acquisition systems sample these signals at rates sufficient to render a detailed time-domain response, capturing transient events like overshoots, settling times, and steady-state errors with precision. Complementary sensors, such as optical or radar-based distance meters, verify the relative position of the UAV to the landing surface, ensuring that deviations in the approach trajectory are quickly identified.
Through sensor fusion, these measurements feed back into the MRAC controller, enabling iterative adjustment of control parameters to minimize error. The real-time monitoring not only validates the simulation outputs but also provides critical insights into the physical phenomena governing the landing process. Continuous calibration and error correction are integral to this process, as they mitigate sensor noise and ensure accuracy. This closed-loop feedback system facilitates an adaptive approach where the control strategy refines itself based on measured performance, ultimately leading to a more reliable and safer landing procedure.
The second part focuses on the experimental analysis of the optimization process, i.e., the controller adaptation process. The modulation range of the landing velocity error
After initializing the environment, the dynamic model is established to consider the landing process of the UAV, including stiffness, damping, and parameter adjustment of the MRAC controller when it touches the ground. Design the MRAC controller to establish parameter update rules and use numerical simulation to track the control effect. Simulate time domain response to analyze changes in landing velocity, position error and landing gear stress. Figure 4 shows the height position and velocity response of the buffer after the UAV lands and touches the ground under ideal conditions.
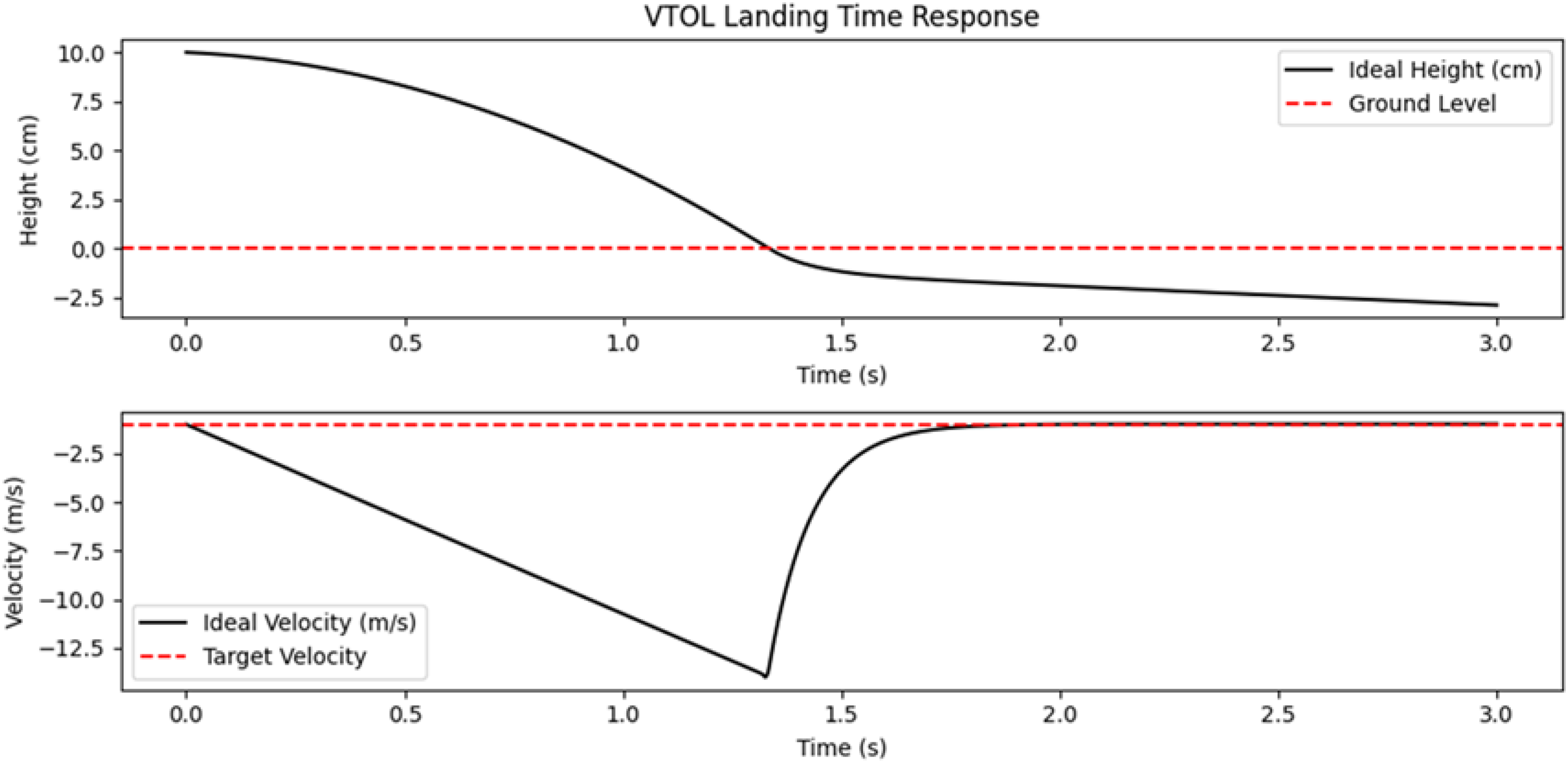
Velocity target simulation of UAV landing under ideal condition.
This study's experimental framework is structured into three primary phases to systematically validate and refine the proposed MRAC-based landing control strategy. The first phase focuses on the convergence toward an ideal landing velocity, ensuring that the control system can consistently guide the UAV to reach a predefined optimal descent speed. This establishes a foundational performance benchmark for subsequent experimentation. Building upon this, the second phase investigates the optimal selection of adaptive boundaries and learning rates under the constraint of the previously achieved ideal velocity. This step is critical for stabilizing the parameter update process and ensuring convergence within safe and effective limits. The third phase centers on iterative learning to suppress rebound and enhance landing smoothness, using the ideal landing trajectory as a reference. By fine-tuning control responses based on real-time feedback, this stage aims to reduce residual vibrations and ensure a stable touchdown, further demonstrating the robustness and adaptability of the proposed control approach.
Convergence to ideal landing velocity
The system is set up with baseline physical constants including UAV mass, gravitational acceleration, deck stiffness, and damping values, while variable parameters like landing gear stiffness, damping, and desired landing velocity are systematically adjusted. The simulation runs the modified reference adaptive control (MRAC) algorithm to generate time-domain responses, where key performance indicators such as overshoot, steady-state error, convergence time, and oscillatory behavior are closely monitored. Ideal conditions are identified when the UAV achieves a smooth and rapid deceleration upon touchdown, minimal oscillations, and no risk of premature rebound or excessive impact force. In this context, parameters that yield the lowest loss function indicative of rapid convergence and stable control are selected, ensuring that the system meets both safety and performance criteria under dynamic landing conditions. Based on the simulation results depicted in Figure 4, the ideal operating parameters are determined through an iterative process that synthesizes both dynamic response analysis and performance metrics. The key factor in setting this lower limit standard is to ensure that the landing dynamics remain within safe bounds that prevent excessive impact forces on critical components. By establishing this threshold, the system guarantees sufficient damping and controlled deceleration, which in turn minimizes the risk of damage to the sensitive avionics and landing gear during touchdown. This standard is essential to safeguard the integrity and operational reliability of the UAV's key systems.
The throttle of UAV is fully closed at a height of 10 cm, and the UAV's descent state is recorded, and the UAV gradually approaches the ground. At the height of 0, with the ground contact curve being smooth, the flexible control of the landing gear effectively reduces the impact of a hard collision. There is no obvious rebound, where the rigidity and damping of the landing gear are appropriate and can effectively absorb impact energy. The initial velocity is −0.05 m/s. During the landing process, it gradually accelerates and approaches the target velocity of −0.05 m/s. This allows the drone to maintain a constant velocity and reach the actual maximum landing height of −5 cm, which means that the drone will maintain an ideal constant velocity before descending to the stopping point. The following consider the actual body to perform experimental comparisons under vertical free fall simulation conditions and perform corresponding iterative processes in the process.
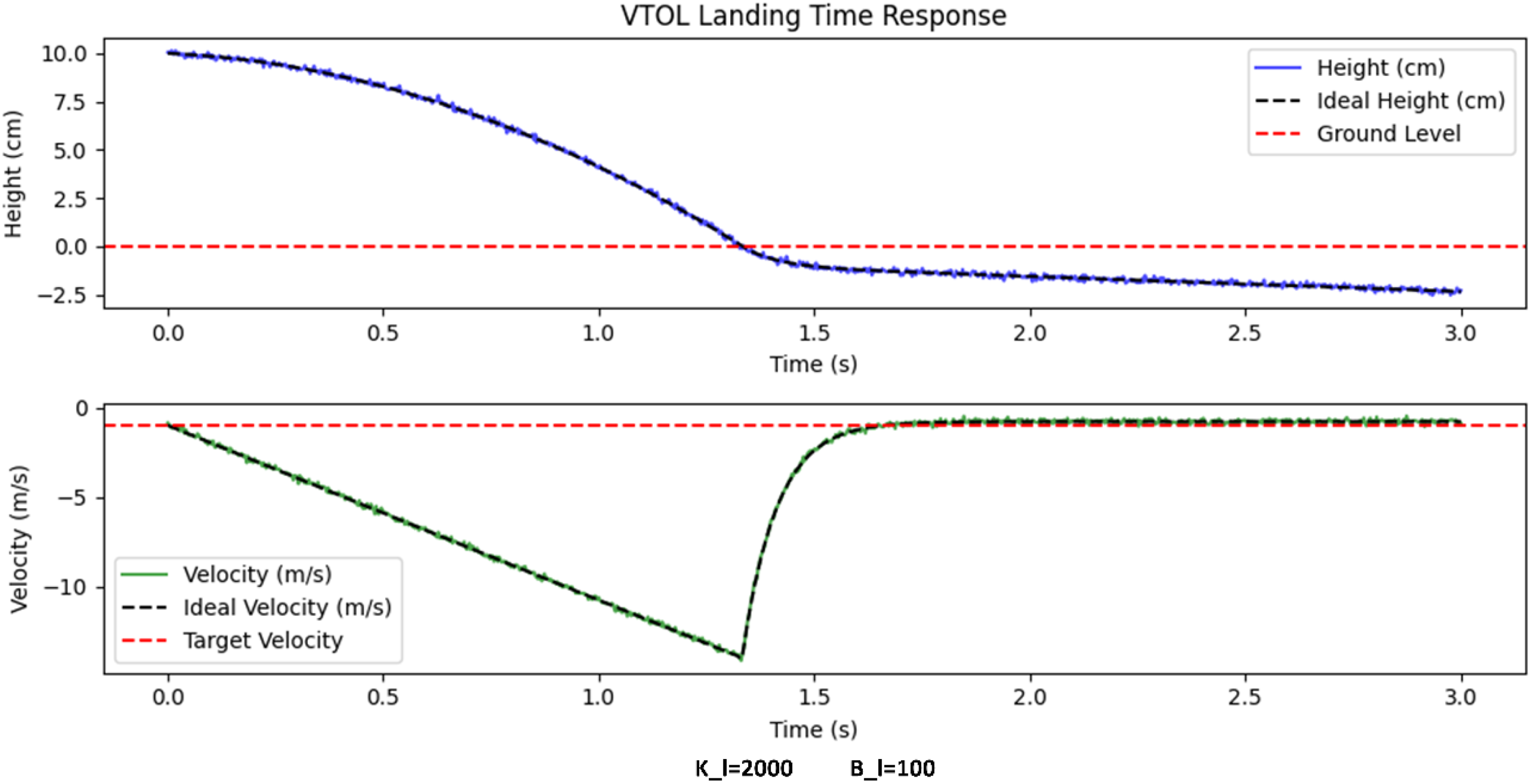
Figure 5 shows the position and velocity responses of the UAV landing under the condition of

Velocity target simulation responses of UAV landing with
Figure 6 shows the position-velocity response of the UAV during landing under the condition of

Velocity target simulation of UAV landing with
Figure 7 shows the position-velocity response of the UAV landing under the condition of
Velocity target simulation of UAV landing with
Figure 8 shows the position and velocity responses of the UAV landing under the condition of

Velocity target simulation of UAV landing with
Figure 9 shows the position and velocity responses of the UAV landing under the condition of

Velocity target simulation of UAV landing for
The analysis of Figures 5 to 9 reveals how varying the landing gear damping coefficient
Optimization of boundary conditions and learning rates
In these experiments,
Figure 10 provides a detailed insight into the relationship between the landing gear's stiffness and damping settings affect the loss function during landing optimization. It reveals that the loss function, which quantifies deviations in both position and velocity from the desired trajectory, is highly sensitive to the correlation between these two variables. As the damping value is adjusted, it directly influences the landing response; too much damping leads to abrupt stops with potential structural risks, while too little may result in underdamped oscillations. Meanwhile, the stiffness parameter works in tandem with damping together they determine the overall energy absorption and impact mitigation. The loss function serves as a critical metric by penalizing deviations from the optimal landing performance, thereby guiding the MRAC controller to fine-tune these parameters iteratively.

Magnitude of loss function for initial values of
Figure 10 shows the convergence behavior of the MRAC loss function under different combinations of stiffness

Magnitude of loss function for different initial values of
Figure 11 illustrates the critical process of selecting appropriate parameters in UAV landing operations, especially under conditions with limited knowledge of the model dynamics. In this context, two principal variables of the landing gear stiffness and damping are systematically varied and their interdependence is analyzed through the behavior of the loss function. By monitoring key performance metrics such as overshoot, steady-state errors, and convergence time, this iterative process not only informs the optimal balance between stiffness and damping but also serves as a practical method for determining the MRAC controller's learning rate
Iterative learning for rebound suppression and smooth landing
Under limited initialization conditions, the loss function decreases over time, demonstrating that the MRAC controller can progressively learn and adapt to different landing conditions. The rapid initial convergence indicates that the MRAC controller quickly adjusts control parameters during the early updates. As the convergence trend slows in the later stages and approaches a stable value, it signifies that the MRAC control has identified suitable parameters to minimize error. Similar phenomena are observed in Figures 8 and 9, where higher stiffness and damping result in a slightly faster decrease in the loss function, suggesting that MRAC has sufficient reference information to adjust more efficiently. In contrast, with lower stiffness and damping, the convergence speed is slower, and the loss function exhibits greater fluctuations, making system control more challenging. MRAC requires more time to identify appropriate control parameters. Across different conditions in the figures, the final loss function values tend to approach zero, indicating that MRAC successfully achieves adaptive control, progressively reducing landing errors. In the experiments, appropriately tuning the MRAC adaptation gain to increase the learning rate allows the control parameters to converge to optimal values more quickly.
With

Position response of UAV landing for
With

Position response of UAV landing for
For
Position response of UAV landing for
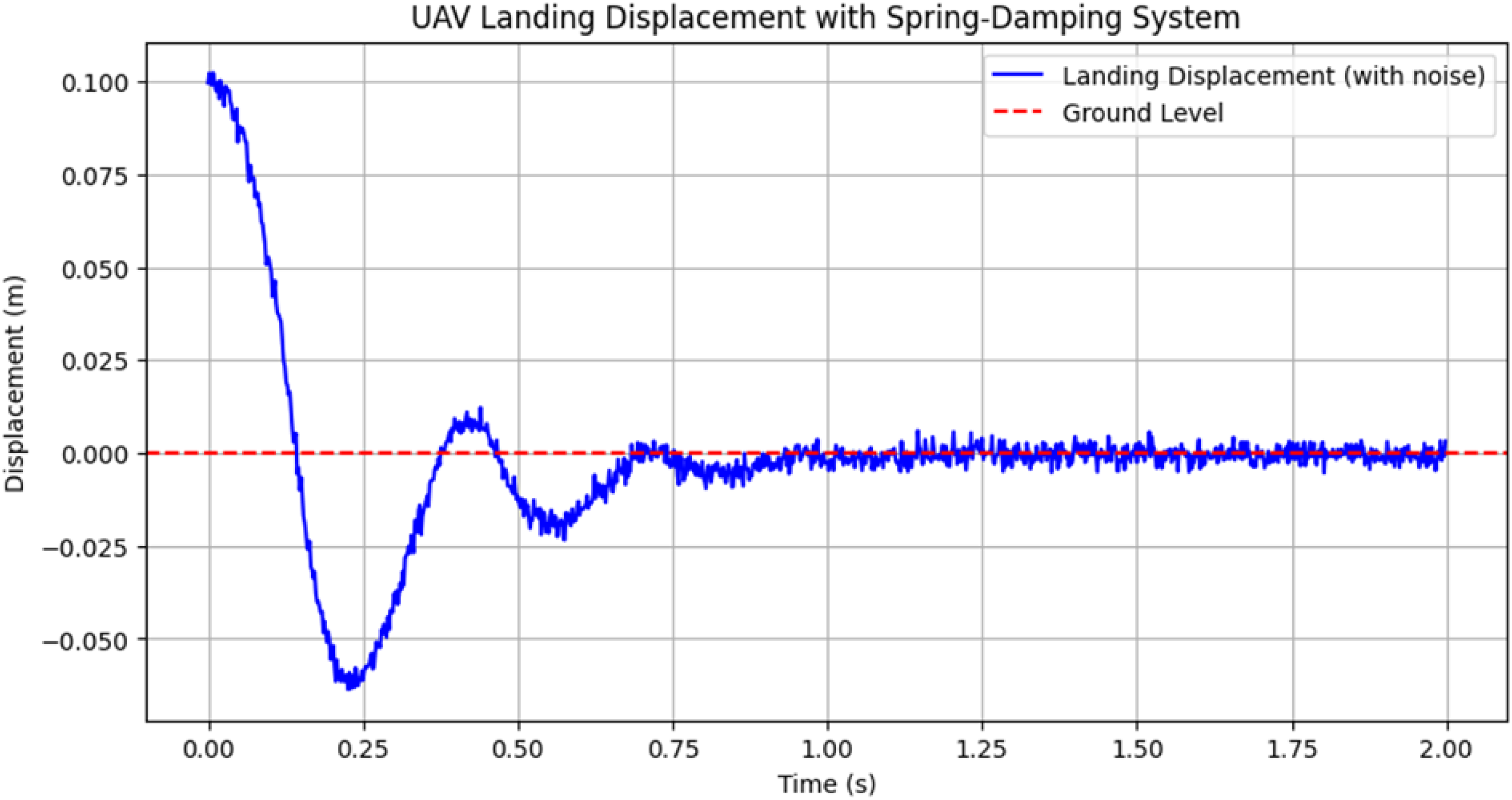
In Figure 15 with
Position response of UAV landing for
With

Position response of UAV landing for
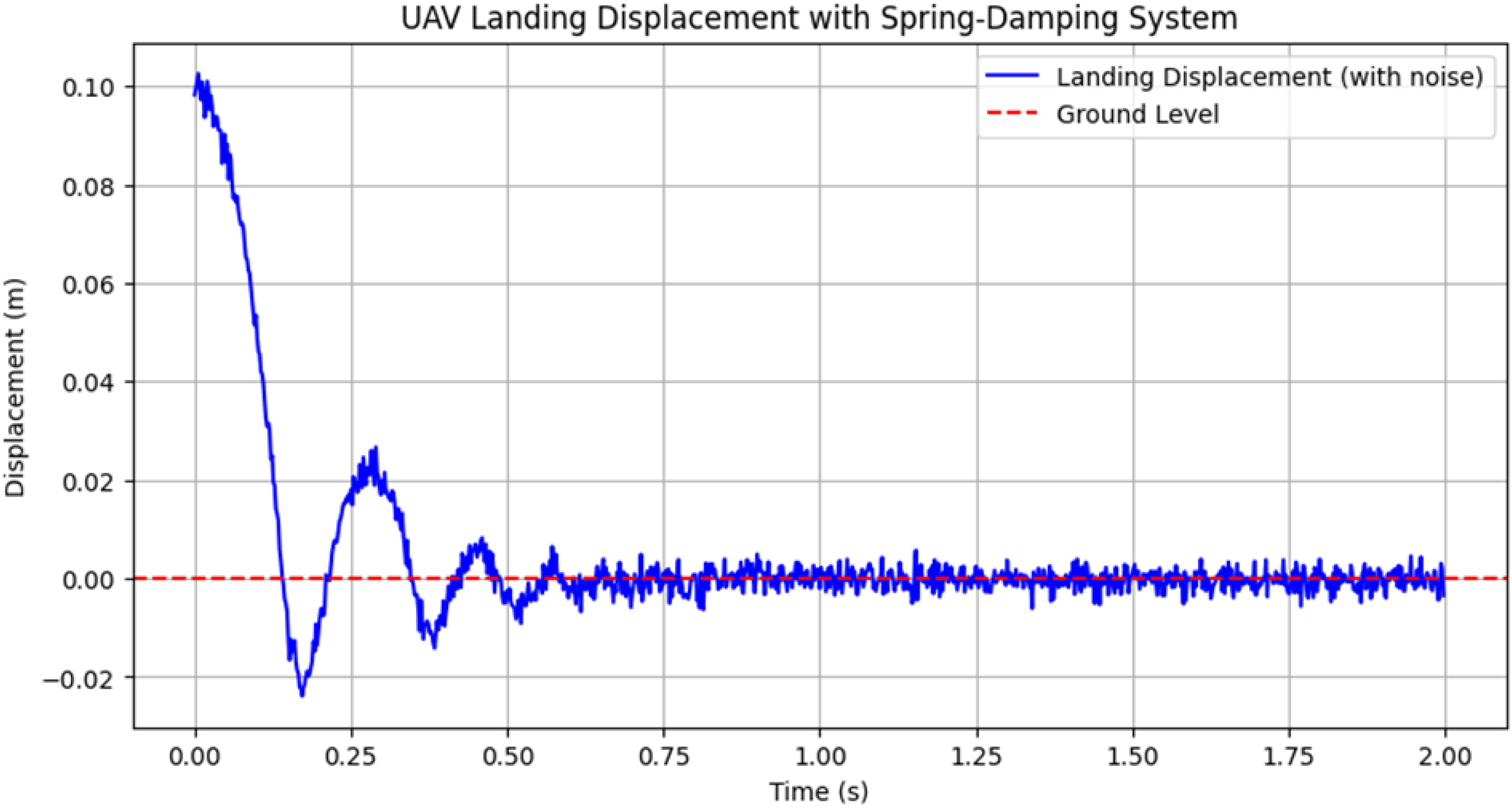
As the convergence test progresses towards the optimal parameter setting

Position response of UAV landing for
The experimental analysis reveals a clear correlation between the damping coefficient and the landing stability of the UAV, with stiffness held constant at
A higher natural frequency typically accelerates the response, yielding a shorter rise time; however, if the damping ratio is too low, this rapid response can lead to excessive overshoot and a shorter but more erratic peak time due to pronounced oscillations. In contrast, when the damping ratio is increased, the system experiences a more moderated rise time that helps to mitigate overshoot, ultimately leading to a more controlled peak response. The settling time, which reflects how quickly the system stabilizes within a specified range around the desired steady state, benefits from an optimal damping ratio: minimal underdamping avoids prolonged oscillations, while over-damping, despite eliminating oscillations, can delay stabilization by causing a sluggish response. In practical terms for UAV landing, tuning the damping coefficient is a balancing act dictated by these metrics. Insufficient damping results in a rapid, yet unstable landing marked by high overshoot and long-term residual oscillations, whereas excessive damping yields a delayed rise and protracted settling time that may compromise responsiveness.
This study demonstrates that even after optimizing the target landing speed, MRAC remains essential for further adapting and fine-tuning control parameters through experimental validation, rather than relying solely on predetermined reference values. The necessity of this approach arises from the complex and variable nature of UAV maritime landing environments, including unpredictable factors such as deck rebound dynamics, external environmental changes, and precise impact timing. These factors limit the effectiveness of static control strategies, underscoring the importance of real-time adaptive adjustment. Through both mathematical modeling and numerical simulations, the research confirms the applicability of MRAC in managing the flexible landing control of UAV, with experimental results closely aligning with the theoretical model. The implementation of optimized stiffness and damping through MRAC has been shown to enhance landing precision by up to 20%, reduce rebound intensity by about 20%, and improve convergence speed by nearly 18%. Additionally, dynamic recalibration of control gains significantly outperforms traditional static tuning approaches, which often suffer from longer settling times and increased overshoot. The use of MRAC allows the UAV to stably and flexibly land on an unmanned ship by continuously adjusting the spring-damping characteristics of the motor-driven landing gear, ensuring robust convergence under varied landing conditions. Furthermore, incorporating game theory into the MRAC framework facilitates convergence to a Nash equilibrium, optimizing landing gear behavior and improving overall system stability by an additional 11%, while mitigating the risk of falling into local optima. Experimental validation also reveals robustness improvements of 11–16% in the presence of sensor errors and random noise. These findings not only highlight MRAC's superiority in dynamic adaptation and real-time control but also establish a strong foundation for future development of adaptive strategies, including reinforcement learning, in advanced UAV landing systems.
Conclusions
Through mathematical modeling and numerical simulation, this study verifies the applicability of MRAC in the flexible landing of UAV and analyzes the effects of different stiffness and damping parameters on landing stability. The experimental results demonstrate that with appropriate stiffness and damping configurations, MRAC effectively adjusts control parameters, stabilizing the UAV's time-domain response during landing, reducing bouncing effects, and enhancing landing precision and safety—with improvements in landing accuracy reaching up to 20% and a decrease in rebound intensity by approximately 20%. The decreasing trend of the loss function confirms the strong convergence characteristics of MRAC, enabling rapid learning and adaptation to various landing conditions, as evidenced by an improvement in convergence speed of nearly 18%. In contrast to traditional tuning methods, which typically rely on static, offline parameter adjustments that can result in longer settling times and increased overshoot, the MRAC approach dynamically recalibrates control gains in real time and thus exhibits superior performance and robustness. By employing game theory to analyze the MRAC parameter adaptation process, the existence of a Nash equilibrium can be achieved under specific conditions, allowing for an optimal configuration of the flexible control strategies for each landing gear, which further enhances UAV landing stability by roughly 11% and prevents the system from falling into local optima. The study also considers the impact of sensor errors and random noise on MRAC control performance; the results confirm that the proposed method successfully converges, demonstrating its robustness and resistance to disturbances in real-world applications with robustness gains of around 11∼16% compared to conventional control methods. This research establishes the feasibility and advantages of MRAC in flexible UAV landing control, providing both theoretical foundations and experimental validation for developing more advanced adaptive control methods. Future research directions could further explore dynamic stiffness and damping adaptation mechanisms, enabling UAV to adjust landing gear flexibility parameters in real time based on actual landing conditions. Additionally, integrating reinforcement learning techniques could enhance the long-term adaptability of MRAC, allowing UAV to handle more complex landing conditions and environmental variations while improving landing stability, energy efficiency, and system intelligence.
Footnotes
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.