
Abstract
A Distributed Nonlinear Model Predictive Control (DNMPC) approach is proposed to control the simplified decoupled dynamics of a quadrotor UAV. The performance of DNMPC is compared, in terms of tracking and execution time, to that of standard control configurations based on centralized MPC and PID control. The aim is to show the suitability of each configuration in terms of performance and practicality in real-time applications. The results show the advantage of using DNMPC in terms of ease of tuning and computational cost over more centralized feedback control approaches. For extra realism, wind disturbances and sensor noise are incorporated into the simulations.
Introduction
In the last decades, different control techniques have been used in the aerospace industry, these range from basic classical control to modern artificial intelligence techniques used in many other fields. Classical controllers such as Proportional–Integral–Derivative PID, 1 one of the best-known controllers, successfully stabilises a wide range of systems. 2 Aerospace systems, such as aircraft or spacecraft, are nonlinear systems that could benefit from being controlled by advanced control systems enforcing strict stability and reliability requirements.
MPC is an advanced control approach in which the control law is internally determined according to the forecasted response of the dynamic model to be controlled. 2 An open-loop optimal control problem (OLOCP) is solved within a specified duration called the Prediction Horizon to produce an optimal manipulated input trajectory for the optimal anticipated state trajectory. Out of the determined manipulated input trajectory, only the first control input action is applied to the system, and the whole process is repeated at every time sample. Furthermore, one of the significant features of MPC is that it can handle multiple outputs and multiple inputs, or MIMO systems, 3 making it perfect for multivariable feedback control since the 1990s. 4 In recent years, significant progress in enhancing MPC capabilities has been made. For instance, learning-based MPC integrates machine learning techniques to improve model accuracy and adaptability in dynamic environments. 5 Robust and stochastic MPC formulations have also been widely developed to account for model uncertainties and external disturbances explicitly, ensuring reliable performance even under challenging conditions. 6 Furthermore, real-time optimization improvements and parallel computing strategies have expanded the feasibility of implementing computationally intensive MPC schemes on embedded systems.7,8 The testbed for this research is a Quadrotor, an Unmanned Aerial Vehicle (UAV) that features exceptional manoeuvrability, hovering, vertical take-off and landing capabilities. MPC is extensively used in the literature as a flight controller for quadrotors. Identifying a suitable dynamic model for a quadrotor is crucial for MPC. MPC has been applied to many model types, including linear time-invariant, linear time-varying, piecewise affine, and nonlinear systems. Since the mathematical model is the centrepiece of MPC, the model type is pivotal in how efficiently the optimization solver will solve the OLOCP. Complex dynamics representations may lead to a computational burden when solving the OLOCP.
Linear dynamics were considered in designing a linear model predictive control (LMPC) for the quadrotor in Islam et al., 9 resulting in a good tracking performance and disturbance rejection for different trajectories. Alexies et al. 10 used a switching type MPC in controlling the quadrotor but with a linearized piecewise affine model around multiple operating points to track a trajectory with the presence of disturbances. The authors decoupled the dynamics to form a “dual control scheme.” A separate MPC was used to control the translational motion using the translational augmented dynamics, and another MPC was used to control the attitude of the quadrotor. As a matter of fact, the attitude dynamics (angular motion) of the quadrotor are faster in nature compared to the translational dynamics. 10 Thus, separating the controller for the translational motion and attitude is possible when the dynamics are decoupled.
A centralized nonlinear MPC was investigated in Abdolhosseini et al. 11 based on a reduced nonlinear dynamic model of a quadrotor. It was shown that using a reduced nonlinear model led to a simpler MPC solution that was easier to implement and produced a similar performance to that of an MPC solution based on a full-order model. Reducing the computational complexity has been addressed effectively in Li et al. 12 using machine learning to learn the control law from well-designed MPC flight data. However, this approach replaces the MPC with a clone that is limited by the conditions of the dataset used in the training stage.
Also, many researchers used the nominal MPC in conjunction with another technique. The authors in Cheng and Yang 13 proposed a two-loop controller in which the outer loop is MPC-based to control the translational motion and a faster inner loop based on PID to control the attitude of the quadrotor. Although they have proved in simulation tests the effectiveness of using MPC to respect the constraints of the actuators and track the trajectory accurately, the disturbance effect was not introduced in their proposal. Hence, robustness concerns could arise, and the constraints may be violated if the controller is not robust enough when the quadrotor is subjected to a disturbance. Moreover, comparative studies were conducted to quantify the performance and the control effort of the linear MPC versus PID, PD, and Linear Quadratic Regulator (LQR) in the Okasha et al. 14 The authors claim that MPC offers better tracking performance than other techniques. Their study adopted the centralized LMPC and tested on a smooth trajectory without sharp manoeuvres. The results are convincing, but when it comes to fast and very sharp manoeuvres, the results need to be verified.
The configuration of MPC formulation and how it handles the system dynamics could be varied according to the system complexity and the performance requirements.
15
In general, there are three different MPC configurations or architectures to control the system, namely, Centralized, Decentralized, and Distributed MPC. In centralized MPC, large-scale systems are controlled using a single MPC with one optimal problem. Although this architecture is the greatest for performance, it is considered impracticable for large systems due to its computational requirements.
16
The decentralized MPC architecture features a separate MPC for each dynamics subsystem. Usually, the subsystem dynamics are decoupled from each other, the mutual interaction is ignored, and each MPC has its optimal problem.15,16 On the other hand, the distributed model predictive control (DMPC) structure shown in Figure 1, is introduced when the decentralized configuration is associated with a communication ability between the individual MPC agents to facilitate exchanging information between them.
16
In this generalized setup of

Generalized configuration of distributed MPC. Each subsystem
The theory of DMPC and its stability has been extensively studied in the literature.17,18 Although DMPC aims to control large-scale systems with multiple objectives, it has been applied successfully in controlling AC/AC converters in power applications to reduce the computational burden when centralized MPC is used Tarisciotti et al.
19
The previous statement brings us to the contributions of the current research. To the best of our knowledge, no study was conducted to analyze the performance of different MPC configurations, mainly when the nonlinear model is used. Furthermore, adopting DNMPC for quadrotors has gained less interest in the UAV control literature. Therefore, the contributions of this research are twofold:
Introducing Distributed Nonlinear MPC for controlling the quadrotor by decomposing the centralized MPC into multiple agents whilst reducing the computation complexity of the overall controller. Evaluate various MPC configurations in terms of performance and computational complexity.
The remainder of this paper is organised as follows: Section “Quadrotor dynamic model” focuses on deriving the quadrotor UAV model and its dynamics as a part of the control system. Section “Problem formulation” highlights the problem formulation and theory underlying the Distributed Nonlinear MPC. Section “DNMPC for quadrotor UAV” presents the design of the DNMP for the quadrotor, Section “Numerical tests & results” demonstrates the various tests applied to the proposed DNMPC and other configurations, along with their results. Section “Discussion” provides a detailed discussion of the results, while Section “Conclusion” concludes the findings of the paper.
Notation
In this paper, vectors are represented in bold lowercase letters (e.g.,
Quadrotor dynamic model
Defining the coordinate systems is crucial to modelling the dynamics of the quadrotor and describing its states. The Earth frame, fixed on the Earth, denoted






The quadrotor’s frames coordinate systems.
where

The parameters of the quadrotor UAV used in this paper are adopted from Sanca et al. 23 and given in Table 1.
Quadrotor UAV parameters.

Problem formulation
Distributed Nonlinear MPC (DNMPC) comprises 
Where, 
At time step 






Where, 
The objective of each agent’s optimization problem is to minimize the tracking error between the local state
We will assume that the models in (6) are decoupled and that communication between agents is sufficient and available as needed by any agent.
Accordingly, in a distributed style, problem (9) is divided into multiple OLOCPs given by
Where the stage cost function 


DNMPC for Quadrotor UAV
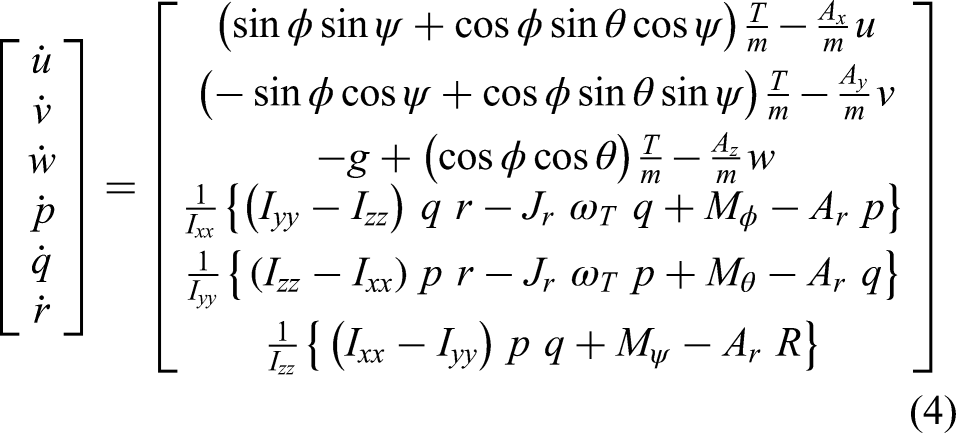
When designing a controller for quadrotors, different effects could be considered in the dynamics model; the reader is referred to Ghazbi et al. 26 for a list of these effects. Including all effects with a full dynamics representation for the plant will intuitively increase computational complexity. Therefore, a simplified version of the dynamics, such as Abdolhosseini et al., 11 is used to achieve a faster solution during each prediction iteration. However, contrary to Cheng and Yang, 13 the linear and rotational aerodynamic drag forces are considered in this paper. The resultant dynamics are driven by (4), decoupled and reduced based on the following assumptions:
The gyroscopic effects of the motors we will be ignored and will assume that the pitch, roll and yaw axes are decoupled.
The heading of the quadrotor is assumed not controlled, and the related torque is zero.
If 
Although the nonlinearity has been significantly reduced and weakened, the above dynamics, without considering the linear and rotational aerodynamic drag forces, are validated in Abdolhosseini et al.
11
when the pitching and rolling angles are limited to
This threshold marks the boundary of the flight envelope within which the simplifying assumptions (such as negligible cross-coupling and small-angle approximations) hold. Exceeding this angular limit leads to dynamics no longer accurately captured by the reduced-order model, which can compromise controller performance. Therefore, for the controller design and validation in this work, the roll and pitch angles are constrained within
DNMPC controller
Inspired by Tarisciotti et al.,
19
with assumptions (1-3), we considered the Quadrotor UAV dynamics as a large-scale system in this paper, thanks to dynamics decoupling, (14) represented as five interconnected subsystems where each subsystem is controlled by its own MPC agent shown in Figure 3 to form the DNMPC with

Block diagram for Distributed nonlinear MPC for Quadrotor UAV.
The reference set-point is provided for each corresponding MPC agent in the first group. The role of the Z-MPC is to determine the optimal thrust force 









Handling constraint
To unify the framework of the analysis and introduce a fair comparison between the various configurations, unified constraints have been applied. The constraints set for the forces (5) are calculated based on the technical parameters of the brushless motors and their propellers. Assuming that all propulsion brushless motors are identical, the minimum lifting force is equal to
Numerical tests & results
This section explains the simulation environment under which the proposed DNMPC controller and the other three configurations are tested. The other configurations are the Centralized Nonlinear MPC with full dynamics (CNMPC-F) built with dynamics (4), the Centralized Nonlinear MPC with reduced decoupled dynamics (CNMPC-R) built with dynamics (14), and Nonlinear MPC with PID (MPC-PID) in Cheng and Yang. 13
Simulation setup
The modelling of the quadrotor UAV has been done in MATLAB/Simulink, while the model predictive controllers in all configurations have been carried out in MATLAB/Simulink by integrating CasADi, an open-source optimization toolkit with a MATLAB interface. 27 The nonlinear OLOCP has been solved using the Interior Point Optimizer (Ipopt), 28 natively available in CasADi. The weighting matrices for each configuration, prediction horizon, control horizon, and sampling time are summarized in Table 2.
Controllers parameters.

The weighting matrices
Noise modelling
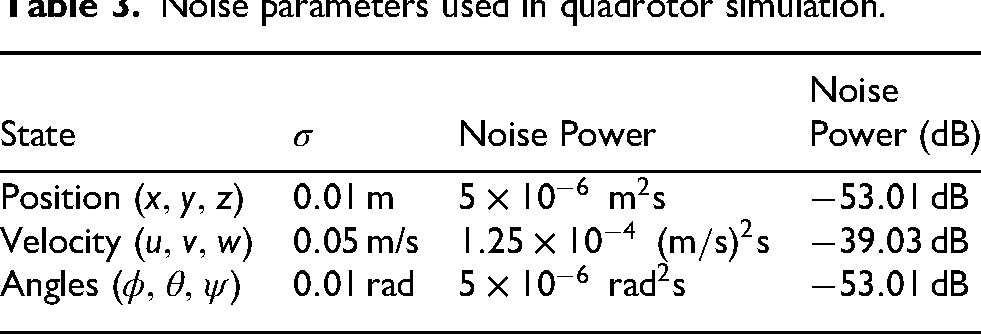
To assess the robustness of the DNMPC algorithm for the quadrotor, Gaussian white noise was introduced to the state measurements, simulating realistic sensor inaccuracies. The noise was applied to the position
Noise parameters used in quadrotor simulation.
Step response results
All configurations were tested by applying a step input of

Step response of DNMPC, CNMPC-F, CNMPC-R, and MPC-PID controllers for x-axis position change from
Step response performance summary of DNMPC, CNMPC-F, CNMPC-R, and MPC-PID controllers for x-axis position change from

Tracking results
Two 3D trajectories were used to test the tracking performance of each control configuration. Figures 5 and 6 illustrate the 3D tracking response for the infinity shape and the trajectory of the multiple short rectangles, respectively. Also, Figures 7 and 8 illustrate the tracking response for both trajectory in

Trajectory tracking performance of DNMPC, CNMPC-F, CNMPC-R, and MPC-PID configurations for a 3D infinite shape trajectory under noisy conditions.

Trajectory tracking performance of DNMPC, CNMPC-F, CNMPC-R, and MPC-PID configurations for a 3D multiple short-rectangles trajectory under noisy conditions.

Tracking performance of DNMPC, CNMPC-F, CNMPC-R, and MPC-PID configurations in

Trajectory tracking performance of DNMPC, CNMPC-F, CNMPC-R, and MPC-PID configurations in

Comparison of motor angular velocities for each configuration for the infinity shape trajectory under noisy conditions. The DNMPC controller produces smoother inputs, as quantified by the standard deviation in Table 5.

Comparison of motor angular velocities for each configuration for the multiple short rectangles under noisy conditions. The DNMPC controller produces smoother inputs, as quantified by the standard deviation in Table 5.
Tracking performance for the tested trajectories, including the RMSE and the solution time for each configuration.

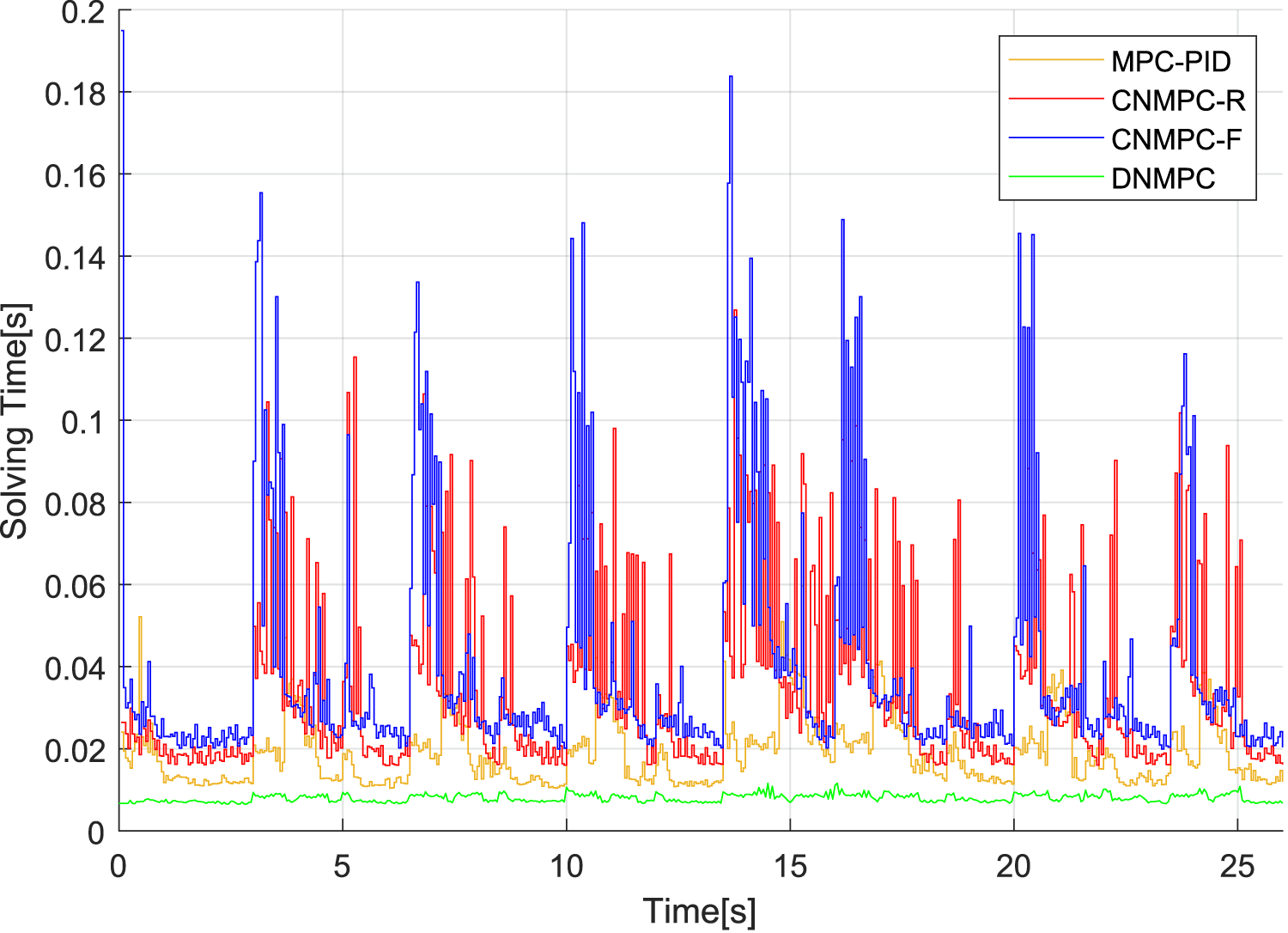
To investigate the practicability and performance of each configuration, the solution time for the OLOCP in each prediction cycle has been monitored for each trajectory tracking case and illustrated in Figures 11 and 12. In addition, the root mean square error RMSE has been determined for all trajectories. Table 5 shows each configuration’s solution time and RMSE for the tested trajectories.

The solution time for each configuration’s OLOCP prediction cycle when tracking the infinity shape trajectory under noisy conditions.
The solution time for each configuration’s OLOCP prediction cycle when tracking the multiple short-rectangle trajectories under noisy conditions.
Moreover, to quantify this smoothness, the standard deviation of the motor angular velocities was calculated for each controller and trajectory. For each case, the time-series data of all four motors were combined into a single vector, and the standard deviation was computed, expressed in rad/s, in Table 5.
Performance under wind disturbances
To assess the robustness of the controllers under realistic external influences, the quadrotor was subjected to a hovering task at a constant altitude of

Performance for DNMPC, CNMPC-F, CNMPC-R, and MPC-PID controllers at hovering under wind disturbances (

Comparison of the four controller configurations under wind disturbances: tracking performance along the
RMSE of the infinity shape trajectory tracking for each control configuration.

Discussion
This section discusses the performance of four different controller configurations, CNMPC-F, CNMPC-R, DNMPC, and MPC-PID, evaluated over two trajectories (Infinity Shape and Multiple Short Rectangles) under noisy and disturbed conditions. A total of eight test cases were conducted to analyze various trade-offs, including tracking accuracy, robustness, computational efficiency, and actuation smoothness. It is seen from Table 5 that decomposing the dynamics and reducing their complexity in the DNMPC led to a significant computation time reduction. This reduction is expected, as computational complexity and thus computation cost can be reduced when the problem dimension is scaled down. For instance, as described in Nocedal and Wright,
29
the factorization in Newton-type solvers typically requires
Concerning tuning, all configurations were tuned using a simple approach where weighting parameters were initialized at one and iteratively adjusted until a best step response was achieved. Tuning the centralized MPCs proved challenging, while the DNMPC configuration was more flexible due to the independence of each agent’s cost function and penalty weights. In terms of the step response analysis, a quantitative analysis under sensor noise conditions is provided in Table 4 to evaluate transient performance. The CNMPC-F controller demonstrates the fastest rise time (
On the other hand, the tracking performance across the two trajectories further distinguishes the controllers. When tracking the Infinity Shape Trajectory, CNMPC-R achieves the lowest RMSE on all axes (
Further insights from Table 5 reveal that DNMPC consistently achieves the lowest motor velocity variability (
It is noteworthy to mention that this work adopts the assumption of seamless communication between agents Assumption 1, which simplifies theoretical analysis and supports the design of the distributed MPC scheme. In our implementation, this assumption holds, as the entire multi-agent system is simulated and executed on a single computer, eliminating delays and packet losses. However, in practical networked control systems, communication is rarely ideal. Real-world deployments are subject to transmission delays, packet losses, and limited bandwidth, which may degrade performance or compromise stability. For instance, unreliable information from neighboring agents can lead to infeasible or suboptimal control actions.
Overall, the discussion includes eight test cases: four controllers evaluated on two trajectories under noisy and disturbance conditions. The results show that while CNMPC-R demonstrates strong tracking accuracy, DNMPC provides the best balance between robustness, smoothness, and computational efficiency, effectively mitigating noise and disturbances. MPC-PID continues to offer real-time performance but at the cost of reduced accuracy and increased control variability.
Conclusion
This paper explores the possible configurations for designing MPC-based flight controllers for a quadrotor UAV. The dynamics of the quadrotor were modelled using its equations of motion and employed as the internal model for the MPC. Four control configurations were studied based on two architectural approaches: centralized and distributed. A nonlinear flight controller based on Distributed MPC (DNMPC) was proposed, in which five separate MPC agents were used to stabilize the quadrotor. All configurations were tested with step inputs and by tracking two different trajectories. The simulation results highlight the strong performance of the DNMPC controller, especially in scenarios involving noisy conditions, where it maintained the smoothest motor velocity profiles indicated by the lowest standard deviation of motor speeds (Table 5). This characteristic is expected to enhance energy efficiency by reducing torque oscillations and associated power losses. Although CNMPC-R achieved the best tracking accuracy under wind disturbances (Table 6), the DNMPC controller maintained a competitive performance while offering notable computational advantages and smoother control actions. These results suggest that DNMPC provides a favorable trade-off between accuracy, computational load, and control stability, making it particularly suitable for real-time and resource-constrained applications. In conclusion, the DNMPC architecture presents a viable and computationally efficient approach to quadrotor trajectory tracking in realistic operating environments. Its distributed design simplifies tuning, supports real-time feasibility, and offers robustness to noise. Future work could involve implementing the controller on embedded hardware and extending the framework to adaptive or learning-based control strategies.
Footnotes
Acknowledgements
This research is funded by the Higher Committee for Education Development in Iraq (HCED) and supported by Sulaimani Polytechnic University, Sulaymaniyah, Iraq.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.