
Abstract
In this paper the design optimization-under-uncertainty of a forward swept wing (FSW) blended wing body (BWB) unmanned aerial vehicle (UAV) is examined. Conventional BWBs are often tailless, which leads to a backward swept wing to ensure longitudinal static stability. This in turn can induce flow separation at the tip, leading to a loss of lift, controllability and the appearance of a nose-up pitching moment. A possible solution to this problem is a conceptual redesign by introducing a forward swept wing, which is inherently free of tip-stall, but needs a careful design in order to be controllable. However, fixed wing UAVs are often produced by means of direct injection expanded foam moulding, which is characterized by not negligible production tolerances. This lead to a reliability-based robust design optimization problem, for which a novel framework is employed: SAMURAI. Firstly, the method accounts for computational cost by means of surrogate modelling, an analytical treatment of the problem and an asynchronous updating scheme that balances design space exploration and objective exploitation. Secondly, the method treats the problem as a multi-objective problem, which leads to a Pareto front of robust and reliable designs. The result is a novel series of UAV designs that are inherently free of tip stall, perform robustly and meet the stability requirements with the target reliability obtained with a computationally feasible budget.
Keywords
Introduction
The widespread use of unmanned aerial vehicles (UAV) has become hard to overlook, amongst other thanks to its versatility in applicability. This has led to an enormous research boost in that field.6,3,12,10,4,1,8,7,5,11,9,2 In order to improve endurance, range, efficiency and the payload capacities of the drones, the ability to optimize these complex structures that are often subjected to variations in geometry due to production tolerances, changes in operating conditions and complex aerodynamic behaviour is fundamental. This in turn may lead to the development of novel optimization schemes and new aerial structures with a decreased drag force, increased lift force, delayed stall angle, reduced noise and vibrations, further extending their capabilities.17,16,14,15,13
A common returning design choice for fixed-wing UAVs is the blended wing body (BWB): a more often than not tailless configuration with the fuselage, the aircraft’s main body, integrated in the wing.21,23,24,18,22,19,25–27,20 The absence of a horizontal tailplane combined with profiles that have positive camber enforces the sweeping and twisting of the wing to obtain longitudinal static stability, the intrinsic desire of the airplane to correct minor changes in its angle of attack (
Even though a number of solutions were introduced to tackle the problem of tip stalling, only a handful can be used on the blended wing body aerial vehicle after its manufacturing (typically addressed as aerodynamic afterthoughts). 33 An alternative approach is a conceptual redesign (typically addressed as an aerodynamic aforethought) of the aircraft to make it inherently free of the occurrence of tip-stall. This can for example be obtained by means of sweeping the wings forward.34,35 From an aerodynamic point of view, the forward swept wing introduces a pressure gradient on the wing pointing in the opposite direction of backward swept wings, resulting in a higher likelihood of flow separation at the root. Since the root of the wing is now typically found behind the CoG, it will still introduce a nose-up pitching moment. However, the control surfaces are often found near the tips of the wing or are not part of the wing, for example when they are part of the conventional T-tail or through the use of the more exotic V-tail,37,36 as will be discussed further on. Overall, this leads to smaller tip-stall and spin tendencies and thus a safer aircraft. Secondly, the vortex-shedding results in a lift distribution that more closely resembles the idealized elliptical lift distribution, characterized by a minimal induced drag and thus a highly efficient planform. Thirdly, regarding stability, longitudinal static stability is now conventionally obtained by twisting the tips of the wing nose-up, as opposed to the conventional backward swept wing, which leads to a higher lift coefficient of the aircraft as a whole and must not be compensated.38,39 As such, the overall efficiency of the wing is higher. However, the sweeping of the wings in a forward direction leads to directional instability: in the event of side slip, a higher lift and higher drag is generated on the side opposite of the side slip direction, since its chord is more directly aligned with the flow, which introduces an aggravating yawing moment. Winglets or end-plates can no longer be placed at the wing tips to mitigate this issue, since they are typically found in front of the CoG. Therefore additional stabilizers must be introduced on the aircraft. Secondly, the sweeping of the wings in a forward direction can lead to aeroelastic divergence, which has been actively been examined in recent years.41,40,42,43,46,48,47,44,49,45
The production of a small (span
However, the classic approaches to OUU remain severely limited by the computational cost that is related to the uncertainty propagation. 50 OUU is therefore prone to, as 58 puts it: “violating a fundamental tenet of numerical optimization - that one should avoid doing too much work until one nears a solution”. In an attempt to account for the shortcomings of conventional approaches, a number of meta-model assisted methods have appeared that may lead to a significant time reduction.53,56 Among the different surrogate-modelling techniques that exist, particular attention has been given to Gaussian process interpolation, also called Kriging. 59 On the one hand this can be explained by the model’s flexibility, being a parameter-free method, and on the other hand this can be attributed to the model’s ability to quantify the (epistemic) uncertainty related to a prediction. The latter has inspired to formulation of different acquisition functions that are tailored to simultaneously pursue design space exploration and objective exploitation, leading to so-called sequential or Bayesian optimization mythologies. The most well known of these acquisition functions is the expected improvement (EI), which led to the efficient global optimization (EGO) framework.61,60 A recent surrogate-assisted (SA) OUU method is SAMURAI, combing a sequential multi-objective approach of the RDO problem with a sequential single-loop formulation of the RBDO. 62 The multi-objective treatment presents the designer with a Pareto front of robust and reliable designs with varying degrees of robustness. A novel acquisition function was formulated through the assessment of the predictive error of robustness and reliability measures. Furthermore, the efficiency was enhanced by formulating the acquisition function in such a way that it permits the selection of a multitude of infill points at once, while a multitude of infill points is still being evaluated. In doing so full use is made of parallelized computational power.
Consequently, this work goes beyond the state-of-the-art by designing a series of forward swept wing blended wing body unmanned aerial vehicles with varying degrees of robustness that are inherently free of tip-stall and robust and reliable in regards to the production tolerances and operating conditions by means of SAMURAI. In Problem Description the problem is formalized and the parameterization of the planform is presented. Subsequently, in Methodology the methodological tools to solve the problem at hand are presented. Finally, in Results and Discussion the resulting designs are discussed.
Problem description
Conceptual aerodynamic design
The design of a forward swept wing (FSW) blended wing body (BWB) unmanned aerial vehicle (UAV) is presented as a possible conceptual solution to the occurrence of tip-stall. From the idea that a FSW designs are inherently insensitive to tip-stall,34,35 the optimization can occur at cruise conditions. Optimal range can be obtained by maximizing the lift-to-drag ratio
In this paper the outperformance of a conventional fixed wing blended wing body UAV used for aerial photography (span
Beyond the requirement of longitudinal static stability
A final deterministic constraint that is enforced is that the ruddervator deflection
To account for the variability in range and stability constraints due to production tolerances and varying operating conditions, the design problem is formulated as a reliability-based robust design optimization problem. This implies that the maximization of the mean of the range is pursued, while simultaneously minimizing the variability on the range. Furthermore, it is intended to meet the stability constraints with a pre-specified probability, as to ensure that production variability does not lead to undesirable flight behaviour. This can be formally formulated as follows

Parameterization
The conventional planform and control surface parameterization accustomed to aerodynamic conceptual design is incorporated here.
35
First the axes system is defined, to simplify our definitions. The
The velocity is treated as a stochastic parameter with a Coefficient of Variation (CoV), corresponding to the standard deviation over the mean, equal to 0.1. This leads to a total of 15 deterministic design variables (
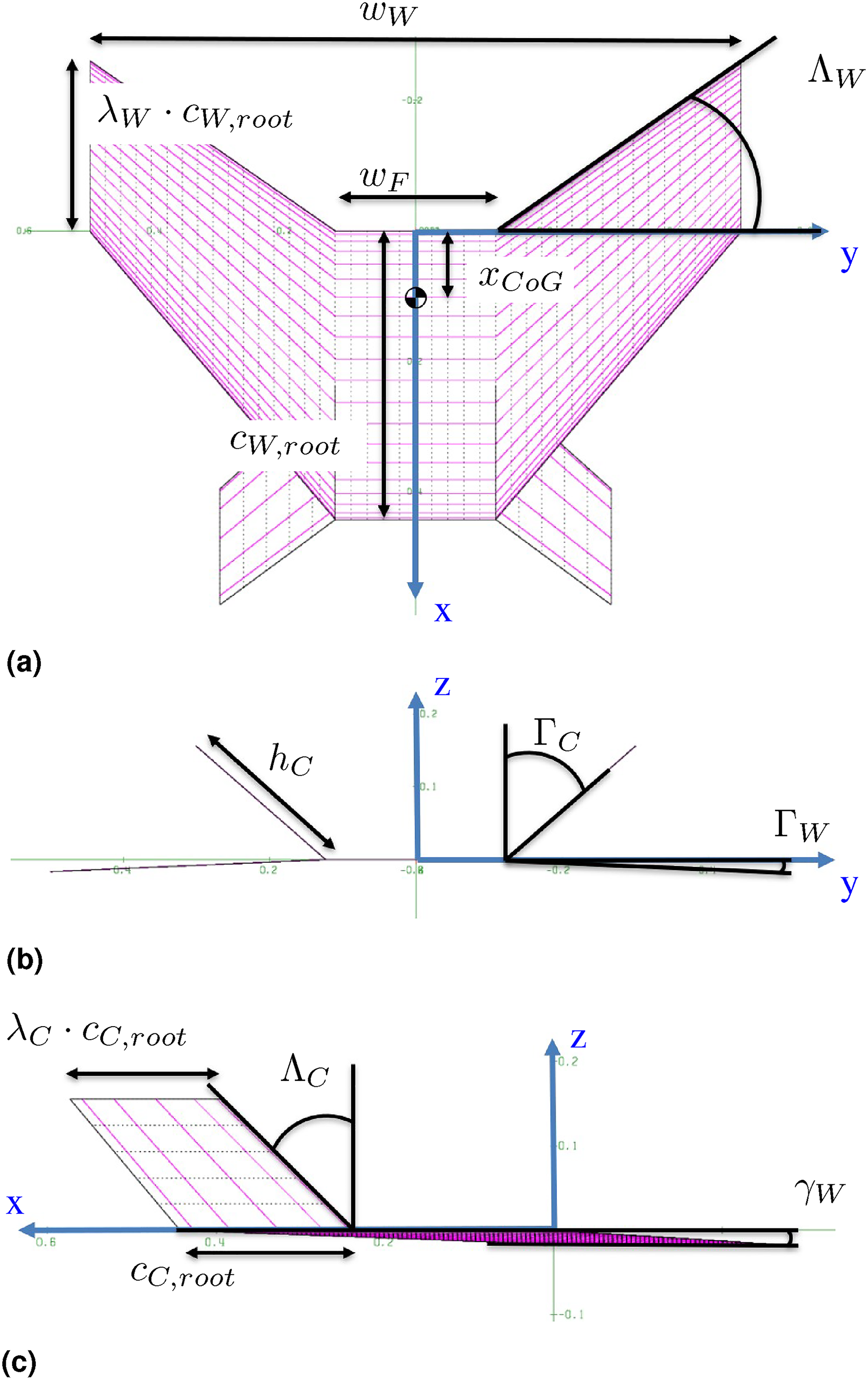
Parameterization of the C2-series UAV. (a) Bottom view; (b) Front view and (c) Side view.
Methodology
In this section the Surrogate-assisted Asynchronous Multi-objective optimization-under-Uncertainty framework for Robust and reliable solutions to Applications in Industry (SAMURAI) is presented. 62 The SAMURAI technique is motivated by the author’s belief that there is a region of overlap between the regions of applicability of robust design optimization and reliability based design optimization based on frequency and impact of events 64 to which is referred as reliability-based robust design optimization (RBRDO). In SAMURAI the RBRDO problem is presented as a constrained multi-objective problem. This presents the designer with a Pareto front of reliable solutions with varying degrees of robustness instead of only one design with an arbitrary level of robustness as is often the case in literature. Secondly, SAMURAI answers the 2002 NASA report on the needs and opportunities for uncertainty-based multidisciplinary design methods regarding and computational cost by means of the introduction of surrogate-modeling techniques, namely Kriging, in the design framework. 50
Kriging is a well-established surrogate-modeling technique, extending on the concepts of Gaussian processes. Jones’ efficient global optimization (EGO) framework 60 forms a natural transition to optimization by introducing the expected improvement (EI) acquisition function, which, when optimized, indicates which design contributes most strongly to the surrogate when added to the training data in pursuit of the optimal point. The optimization of the acquisition function is a computationally cheap problem, since it occurs on the surrogate itself. The methodological cornerstones of SAMURAI: GAMO, 65 ERGO 66 and ESLA 67 formulate novel acquisition functions within the EGO framework to respectively enable asynchronous multi-objective optimization with exploration and exploitation control, RDO by means of an analytical uncertainty propagation through the surrogate and a multi-objective treatment of the problem and RBDO by means of an asymptotic reliability analysis in a single-loop formulation using the KKT-conditions. Combining all the aforementioned, a surrogate-assisted design optimization-under-uncertainty methodology can be created (Figure 2).

Flowchart of the SAMURAI optimization framework applied to the FSW design.
In the SAMURAI framework, Kriging models are constructed for the objective and each of the constraint functions following a design of experiments (DoE). Training of the surrogate model corresponds to maximizing the likelihood that the aforementioned surrogate can reproduce the evaluated data. This boils down to determining the parameters of the covariance function, referred to as hyperparameters. In practice, the concentrated log-likelihood function is maximized. The Matérn covariance function, an often used class in the aerospace community, is used. The construction of the Kriging model is performed using an open-source toolbox ooDACE (object-orientated Design and Analysis of Computer Experiments)
68
using a multi-start SQP methodology. For the DoE a Latin Hypercube Sampling (LHS) approach is used
69
and Morris & Mitchell’s maximin-criterion to impose the space-filling property by maximizing in ascending order the distance between pairs of points and simultaneously minimizing the number of corresponding pairs.
70
Conform Jones et al.’s suggestion, a DoE-size of
To evaluate a UAV design, Drela’s Athena Vortex Lattice (AVL) method is used.
71
AVL requires
Results and discussion
The result of the aerodynamic optimization-under-uncertainty is a front of Pareto optimal solutions (Figure 3). Furthermore, the robust and reliable Pareto front predicted by means of Monte-Carlo Sampling (MCS) of the surrogates and optimized by means of NSGA-II is added along with the validation of the aforementioned fronts using

Robust and reliable Pareto front of mean versus variance of lift over drag for the C2-series designs.
Seven designs are considered, denoted by the CoV of the objective. The two extremes of the Pareto front are considered, along with five intermediate designs. The design with the lowest mean (and highest variance on the Pareto front), thus the deterministically best performing UAV has a CoV equal to

(a) Lowest mean and (b) lowest variance of the C2-series UAV.
Optimal designs.

To illustrate the importance of a multi-objective approach, the objective values of the designs for a single-objective reformulation of the robust design optimization problem are presented in Figure 5 for varying levels of robustness. As expected, it can be observed that at low robustness levels (

Single objective optimality as a function of robustness level.
When moving along the Pareto front from least to most robust (in CoV-decreasing direction) the taper ratios of the wings and control surfaces, the sweep, twist and dihedral angle of the control surfaces are noted to change most significantly. However, a global sensitivity study should be performed to make a definite claim regarding the importance of the design variables, which is left as future research. Nonetheless, lumping part of this information together, moving towards a lesser robust design is characterized by a more pronounced tail: larger sweep and taper ratio of the control surfaces and a smaller taper ratio of the main wing. On the other hand, the twist of the tail of more robust designs is more strongly positive, which increases its stabilizing contribution at the cost of an increased drag. Furthermore noteworthy, for all designs the twist angle of the wing is slightly negative, as one would expect from a backward swept design. This particularity can be attributed to the presence of the tail.
For all designs the position of the centre of gravity
The distributions of the objective and constraints of the forward swept designs after
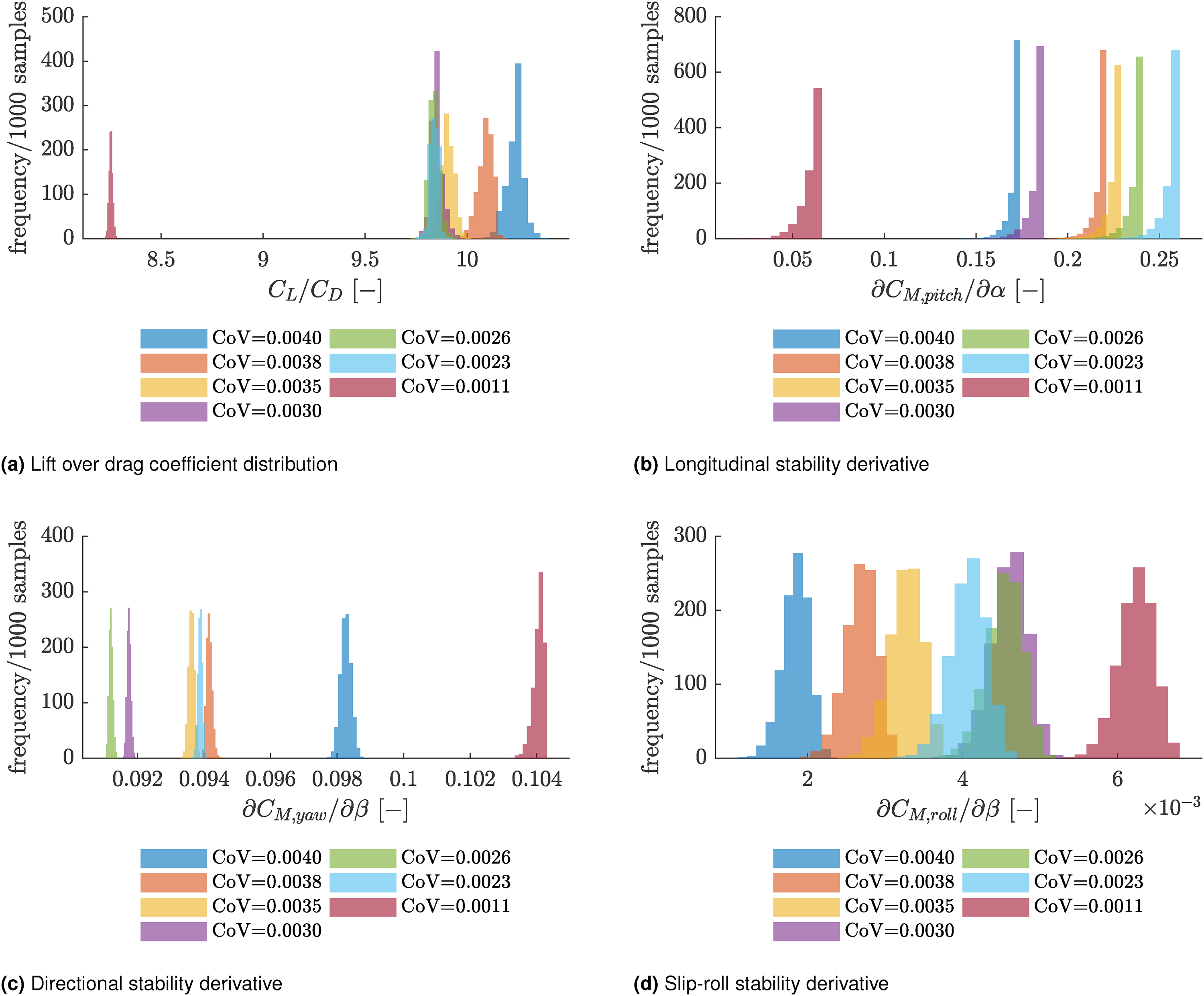
Distributions of objective and constraints of the C2-series FSW-BWB-UAVs.
It can be noticed on the more ‘conventional’ forward swept wing aircraft such as the Grumman X-29, Sukhoi Su-47 and the Bugatti Model 100 that the nose of the aircraft is positioned in front of the tips of the wings, as opposed to the obtained designs. The corresponds to a more forward position of the CoG on the aircraft such that the trailing edge of the wing is positioned behind the CoG. Consequently, the control surfaces can be positioned on the main wing, which might simplify the tail design.
Conclusion and future work
In this paper the conceptual aerodynamic design optimization-under-uncertainty of a fixed wing unmanned aerial vehicle (UAV) with span
A framework was built around the SAMURAI technique, which introduces surrogate modelling to the reliability-based robust design optimization problem, which reformulated as a constrained multi-objective optimization problem. By building surrogates for both the objectives and constraints, a trustworthy, but relatively inexpensive optimization can be obtained. The result is a Pareto front of robust and reliable UAV designs with varying degrees of robustness that are inherently free of tip stall through the design choices made and furthermore are relatively insensitive to production tolerances and changes in operating conditions, leading to a consistent flight behaviour.
Future research is pointed towards a more detailed optimization using high-fidelity tools, such as computational fluid dynamics simulations, that permit modelling the interaction of the fuselage with the wings and assessing the pitch-up tendencies in stall-regime. During this phase the design space can be narrowed to the optimal region found during the design optimization presented in this work. As such, this forms a natural follow-up step to the current work.
Footnotes
Declaration of conflicting interests
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
Conducted as part of the SBO research project 140068 EUFORIA (Efficient Uncertainty quantification For Optimization in Robust design of Industrial Applications) under the financial support of the IWT, the Flemish agency of Innovation through Science and Technology.
Acronyms
Greek symbols
Roman symbols
Operators
Superscript
Subscript
Appendix: SAMURAI
The SAMURAI framework solves RBRDO problems from an EGO perspective. To accomplish this, it introduces a novel acquisition function by building forth on the GAMO,
65
ERGO
66
and ESLA
67
methodologies. This novel acquisition function, the Generalized multi-points Reliability-Based Robust Expected Improvement (
EGO relies on Kriging, which in turn builds forth on the concepts of Gaussian processes and the theorem of Bayes. Kriging can be seen a Gaussian process with mean trend function:
Solving the maximum likelihood estimation (MLE) problem, the Best Linear Unbiased Prediction (BLUP) can be defined and the Mean Square Predictive Error (MSPE), which allows the prediction of unsampled locations
In this paper implicitly a categorization of uncertainties is introduced: changing environmental and operating conditions (Type I), production tolerances and actuator imprecisions (Type II).
63
Furthermore an epistemological categorization is introduced: aleatory uncertainties, “the inherent variation associated with the physical system or environment being considered”, which is denoted with the Fraktur font (
The first part of SAMURAI’s acquisition function relies on the formulation of the generalized asynchronous/multi-points formulation of the robust expected improvement as introduced in
66
and evaluated through Monte Carlo integration:
The surrogate’s prediction of the mean
In order to evaluate the covariance matrix of the mean (
The second part of SAMURAI’s acquisition function relies on the formulation of the multi-points single-loop reliability
Reliability analysis, the process of determining the probability of failure
Asynchronous Multi-Points Probability of Single-Loop Reliability Surrogate-assisted Asynchronous Multi-objective
optimization-under-Uncertainty framework for Robust and
reliable solutions to Applications in Industry (SAMURAI)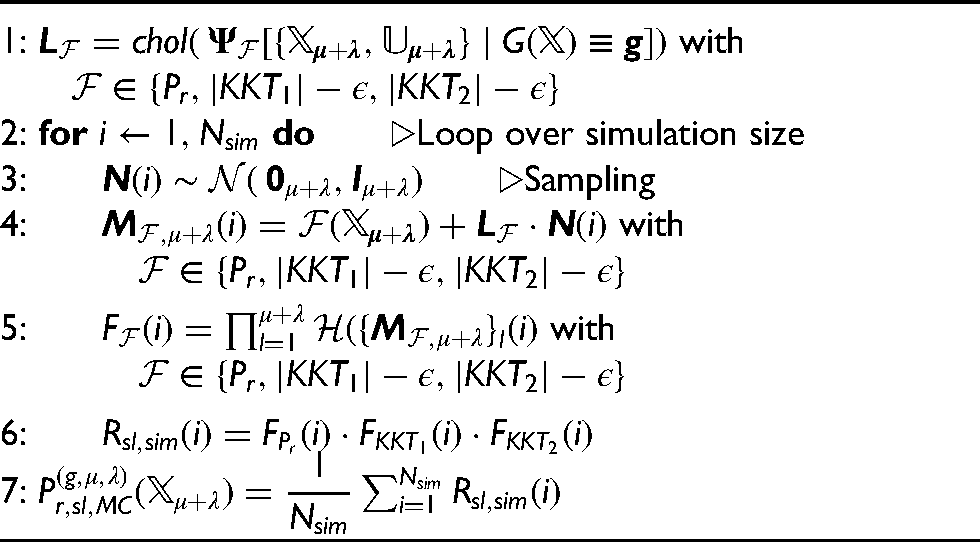
1:
with
2:
3:
▷Sampling
4:
with
5:
with
6:
7:

1:
2: Wait predefined time
3: Determine available
and evaluating
nodes
4: Update
and
5:
6: Estimate hyperparameters Kriging models
7:
8:
9:
10:
11:
12: Start evaluating
13:
14: Update iteration counter
16: Return to line 2
17: Estimate hyperparameters Kriging models
18:
19: