
Abstract
In this paper, the design of control law for a new concept fuel-electric hybrid multi-rotor UAV with lift/attitude control separation is investigated. The remarkable feature of the UAV is that it has a large proportion of fuel weight. Firstly, based on the quasi-coordinate Lagrangian equation and sloshing equivalent model using the multi-mass-spring analogy, the non-linear dynamic model of the UAV considering the fuel slosh dynamics is established. Compared with the existing multi-rotor modeling method, it is more intuitive and accurate to describe the non-linear coupling process of sloshing and UAV's motion degrees of freedom. Secondly, the attitude control law is designed based on the finite-time sliding mode observer and cascaded continuous sliding mode controller to eliminate the adverse effects of fuel sloshing and mass changing, and only using the measurable angles. Furthermore, aiming at the problem of power redundancy of the altitude channel, a memoryless non-linear altitude authority assignment controller based on vertical acceleration is proposed for improving the control performance. Finally, the simulation results of the waypoint flight illustrate the feasibility and effectiveness of the proposed control strategy.
Keywords
Introduction
In recent years, due to the good control characteristics, excellent hovering, and low-speed flight performance of multi-rotor UAV, it has become a research hotspot in the field of UAV.1,2 Generally, the multi-rotor UAV uses lithium batteries as the energy source of power. Compared with high-energy-density fossil fuels, the energy density of lithium battery is much lower, which not only limits the takeoff weight of multi-rotor UAV but also greatly reduces the range and endurance. One solution is to use the fuel engine (e.g. piston engine) as the power source of the multi-rotor. However, its response speed is much slower than the motor though the fuel engine has the ability to burn high-energy-density fossil fuels. Therefore, it needs to keep the rotor speed constant, and at the same time, only via the application of sophisticated rotor pitch changing mechanism and flight control system, the UAV can achieve effective attitude control.
On the other hand, the fuel-electric hybrid multi-rotor UAV has appeared in recent years.3,4 A typical scheme is to use the engine-driven generator to provide power for the motors and backup batteries to improve the range and endurance. The control strategy of this kind of UAV is almost the same as the traditional multi-rotor. Before the breakthrough of battery technology, this strategy can be used to improve the flight time of aircraft. Another feasible scheme is to use the fuel engine to drive the main rotors directly to generate the main lift (the number of the devices is usually in pairs for balancing the counter-torque), while the attitude control is realized by the small power motors driving the auxiliary rotors in pairs around. 5 In this way, the fuel engine does not need to change the speed frequently, while the motor drives the auxiliary rotors to realize the rapid response of the attitude control. Therefore, this kind of UAV not only solves the contradiction between load and range, endurance but also ensure that the UAV has good maneuverability and compact mechanical structure. Till present, there is nearly no relative research literature about this kind of UAV. For the convenience of the following description, this kind of multi-rotor vehicle with separated lift/attitude control is referred to as LAS-UAV (Lift/Attitude Separation Unmanned Aerial Vehicle).
Compared with LAS-UAV, the dynamic modeling method and control technology of traditional multi-rotor UAV are relatively mature. On the one hand, multi-rotor dynamics modeling is generally based on the Newton-Euler method 6 and the Euler-Lagrange method. 7 K. Sreenath studies the control problem of UAV under the swing of suspended load, but only considers the simplified two-dimensional situation. 8 S. Sadr established the dynamic model of UAV under three-dimensional load swing based on the Newton-Euler method. 9 Because the load is ideally suspended in the center of gravity of UAV, the influence of swing on UAV attitude control cannot be considered. Y. Feng further studies the flight control of the UAV when the three-dimensional suspension point is not at the center of gravity of the UAV. 10 In 2017, S. Lee and others analyzed the influence of swing as an external interference on the control performance of multi-rotor UAV based on Newton's second law. 11 Similar to the model used in Ref., 10 this model also failed to fully reflect the non-linear coupling process between swing and other degrees of freedom.
On the other hand, based on the dynamic inverse control, backstepping control, and sliding mode control, etc. a variety of control strategies have been developed for various UAV flight control. S. Darvishpoor presents a novel concept of a co-axial bi-rotor UAV which is controlled by moving its center of gravity. 12 The simulation results of implementing an linear quadratic regulator controller on the nonlinear model for tracking problem shows that the system has convincing performance. M.Tahavori presents the fault recoverability measure for nonlinear systems. 13 The presented measure can be used to ensure that a sufficient redundancy level for the success of fault tolerant control exists in the UAV. T. Bacelar presents a methodology and the experimental validation for collaborative load transportation using two UAVs. 14 The controllers and estimators resort to linear and optimal control techniques, as the linear quadratic regulators and Kalman filters. T. Z. Muslimov proposes a novel approach to control fixed-wing UAV swarm to start and keep flying in a parallel formation of a specific geometry via adaptive backstepping. 15 F. Causa tackles strategic path planning for a multi-UAV routing problem in low altitude urban environment, where GNSS coverage challenges typically affect navigation performance and thus autonomous flight capabilities. 16 B. designed a sliding mode observer for the quad-rotor with unknown bounded disturbances to improve the robustness of the control system. 17 In 2017, Héctor designed a robust track control system for quad-rotor based on the sliding mode algorithm. 18 The system consists of a finite-time sliding mode observer (SMO) and cascaded continuous sliding mode controller (SMC), which improves the robustness and performance of the control system in the presence of uncertain parameters and unknown disturbances. At the same time, the chattering phenomenon is also effectively suppressed. Because the attitude control of LAS-UAV is similar to that of multi-rotor, the control strategy of LAS-UAV can be designed with reference to traditional multi-rotor. Specifically, Héctor's control strategy is adopted by taking the difficult to measure dynamic coupling caused by fuel sloshing as an unmodeled error.
Nevertheless, there are three main differences between LAS-UAV and traditional multi-rotor. First, because the fuel engine is the power source of the main rotor, the speed matched problem of different engines is particularly prominent. Secondly, LAS-UAV usually carries a large proportion of fuel weight. It is necessary to consider the coupling effects of fuel sloshing on the flight dynamic characteristics, as well as the impact of the mass changing of fuel on the stability of the control system. Thirdly, in addition to the major lift provided by the main rotors driven by the engine, the auxiliary motors also generate part of the lift. Therefore, the power redundancy brings the problem of the altitude control authority assignment.
In 2016, Lin CE 5 et al. studied the control technology of the fuel engine as the main power source of the second scheme, and improved the rotational speed matched performance, but had not made a progress on the other issues. In 2018, the author took a new concept LAS-UAV as the research object, and preliminarily realized the controllable flight of LAS-UAV based on the simplified dynamics model and classical PID control algorithm. 19 The flight test results show that the properties of the control system need to be improved. After the detailed analysis of flight data, it is considered that the fuel slosh and fuel consumption of LAS-UAV have obvious impacts on the dynamic characteristics, which should be considered. Therefore, based on previous research, this paper further studies the dynamic problems caused by fuel sloshing, the influence of fuel consumption on the robustness of the control system, and the problem of altitude power redundancy.
Figure 1 shows the photos of the prototype LAS-UAV. The gross weight is 60 kg, and the maximum fuel weight is 25 kg, and the fuel weight accounts for about 30% of the total weight of LAS-UAV.

LAS-UAV prototype.
The contents of this paper are as follows: in the first section, the non-linear flight dynamics model of LAS-UAV is established based on the quasi-coordinate Lagrangian dynamics equation, and slosh modes are included in the dynamic model using the multi-mass-spring analogy. Through the simulation of variable parameter, the influence of sloshing on dynamic is explored. In the second section, the attitude control law is designed based on the finite-time SMO and the cascaded continuous SMC, and the attitude control simulation is carried out. In the third chapter, aiming at the problem of power redundancy of altitude, a power authority allocation strategy based on the target vertical acceleration is proposed for improving the control performance. In the fourth section, the attitude control law and the power authority assignment strategy are verified by the waypoint flight simulation. It shows that the controllers designed in this paper have the potential to solve the fuel sloshing, mass consumption, and power redundancy of the LAS-UAV.
Modeling of LAS-UAV flight dynamics
The basic flight principle of the new LAS-UAV is given here. The non-linear flight dynamic model with sloshing is established based on the quasi-coordinate Lagrangian equation and the equivalent sloshing model. Finally, the effect of fuel sloshing on the dynamics is analyzed.
Basic flight principle of the LAS-UAV
Figure 2 shows the basic flight principle of the LAS-UAV. In the figure, rotors 1-4 are auxiliary rotors for attitude control, rotors 5 and 6 are the main rotors for generating major lift. Among them, rotor 1, 3, 5 rotate clockwise, and others rotate counterclockwise. The roll, pitch, and yaw control are similar to that of conventional quad-rotor UAV, which is realized through the coordinated rotor speed of auxiliary rotors, as shown in Figures 2a to c, respectively. The climbing is different, which is achieved by adjusting the lift of the main rotors driven by two fuel engines at the same time, as shown in Figure 2(d).

Operation diagram of the LAS-UAV. (a) Roll. (b) Pitch. (c) Yaw. (d) Climb.
Flight dynamics modeling of LAS-UAV
To analyze the influence of the fuel sloshing on the dynamics of LAS-UAV, the flight dynamics model is established based on the quasi-coordinate Lagrangian equation, equivalent sloshing model method,
20
and simplified rotor aerodynamic model.
21
The flight dynamics model which considers the internal fuel sloshing is shown in Equations (1 to 3).



In Figure 3, the force generated by rotors is


The schematic diagram of the LAS-UAV flight dynamics analysis.
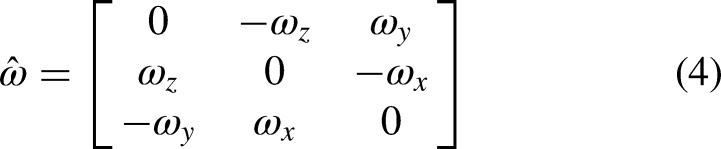
To simplify the analysis process, the origin of the UAV-fixed reference coordinate system o-xyz is selected at the center of the undisturbed fuel. The overall equivalent mass of rotor, engine, motor, fuselage, tank, and other components is ms. The fuel is divided into the mass m0 which cannot slosh, and the i-th slosh mode point mass part mi, the equivalent stiffness, and the damping constants are assumed kix = kiy = ki and cix = ciy = ci. The sloshing and non-sloshing parts meet the following relationship:










Nonlinear dynamic equations
Substitute the LAS-UAV total kinetic energy T into Equations (1 to 3), and use the following equations:







Equation (22) shows that


The translation, rotation, and sloshing equations are obtained as shown in Equations (25 to 32). The translation equations of the LAS-UAV have the following detailed forms:



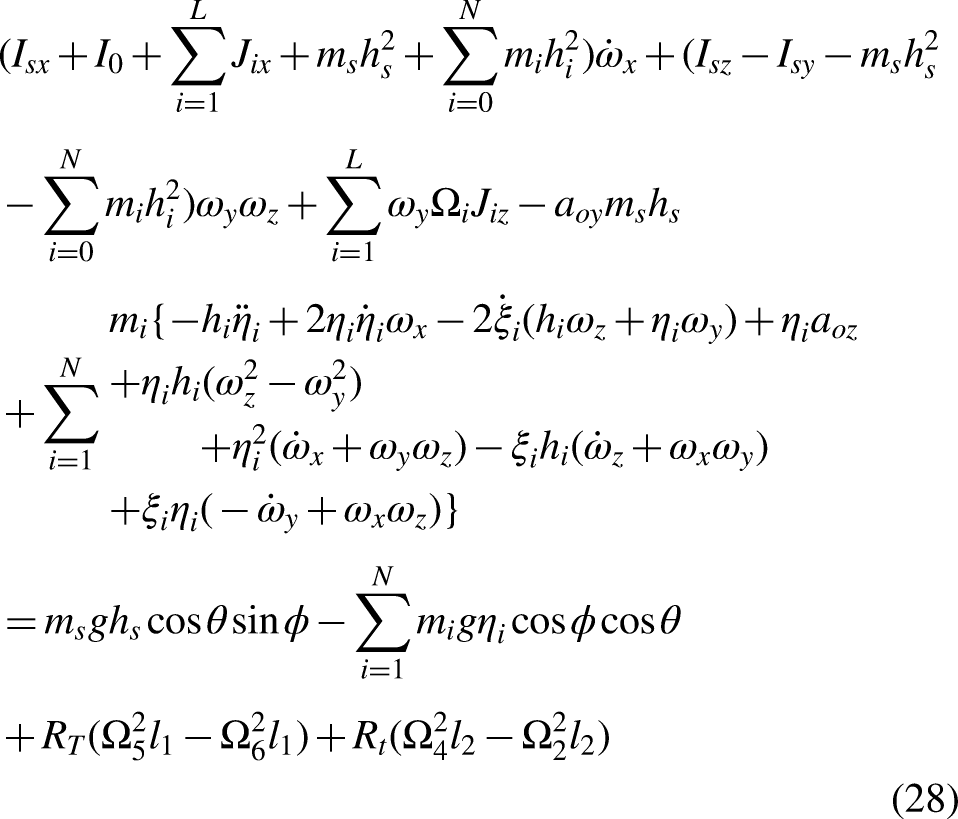





The model describes the non-linear coupling between the sloshing and the flight dynamics of the UAV in detail. It is obvious from the model that the influence of the sloshing on the stability of LAS-UAV is mainly in the form of non-linear superposition terms in the translation and rotation equations, the translation and rotation also affect the dynamic process of sloshing, resulting in the complex coupling between sloshing, translational and rotational degrees of freedom. The LAS-UAV is an under-actuated system, sloshing and horizontal flying cannot be directly controlled by changing rotor speed, and the sloshing states are difficult to be measured in the actual situation. Equation (31) shows that the angular velocity of the pitch will reduce the stiffness of sloshing and may cause instability. Similarly, there is the same phenomenon for the roll. This phenomenon is related to the stable boundary of the liquid sloshing characteristics. 22 At this time, the fuel will accumulate energy and make the control divergent.
Sloshing effect on dynamic characteristics
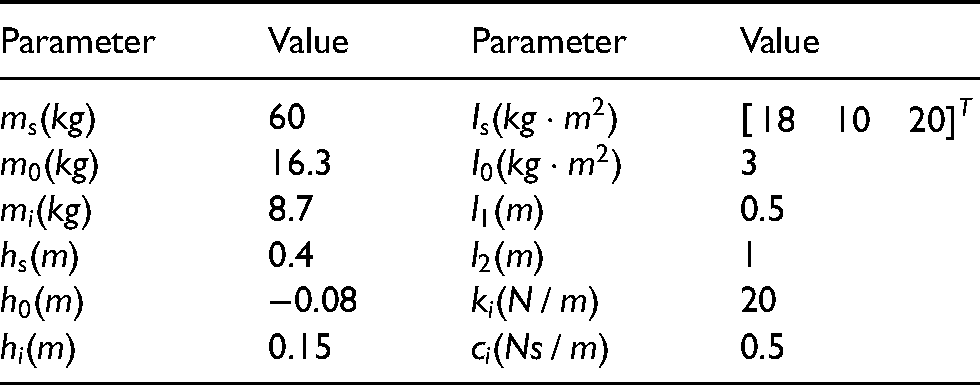
The sloshing characteristics of the fuel are determined by the geometry of the tank, the internal components (whether there is a damping plate), and the fill ratio of the fuel. The adverse non-linear effect of sloshing on dynamics in the example of pitch is studied by simulation. The analysis process for other channels is similar. The equivalent parameters of trapezoidal tank are obtained according to the calculation method given in the Ref. 23 Comparing the sloshing response of the equivalent model and the ANSYS numerical calculation model , the damping coefficient is obtained by manual adjustment. It should be noted that the attitude control method considering sloshing in the later section does not depend on accurate model parameters. Therefore, sloshing simulation mainly explores the mechanism of channel coupling. The main parameters of the LAS-UAV used in the simulation are given in Table 1.
Main physical parameters of the LAS-UAV.
In the simulation, the rotating speeds of the auxiliary rotors 1 and 3 are configured to generate constant pitch moment. The effect of fuel sloshing on the dynamics of the pitch channel under different conditions is studied by changing the sloshing equivalent stiffness. 24 The simulation results are shown in Figure 4. In Figure 4(a), when the fuel cannot slosh, the simulation results of the non-linear model show the same response as the simplified rigid body model. The pitch channel shows a complex response process with a decrease of the equivalent stiffness, and the difference of the pitch angle is increasing at the same time. Figure 4(b) shows clearly that when the equivalent stiffness is large, the angular velocity is similar to which of the simplified rigid body model, and as the equivalent stiffness decreases, the absolute value of angular velocity becomes smaller and smaller. The simulation results show that the sloshing of fuel will change the dynamic characteristics of the LAS-UAV.

Simulation of the variable equivalent stiffness of the pitch and its effect on the angle and the velocity of pitch. (a) Pitch angle response. (b) Pitch angle velocity response.
Ignoring the influence of the small variables of roll and yaw channel in Equations (25) and (29), the nonlinear analysis model of sloshing on the pitch is obtained as shown in Equation (34). It can be seen from this equation that the non-linear effect of fuel sloshing on the pitch is mainly divided into four parts: additional inertia, additional damping, additional higher-order term, and additional moment.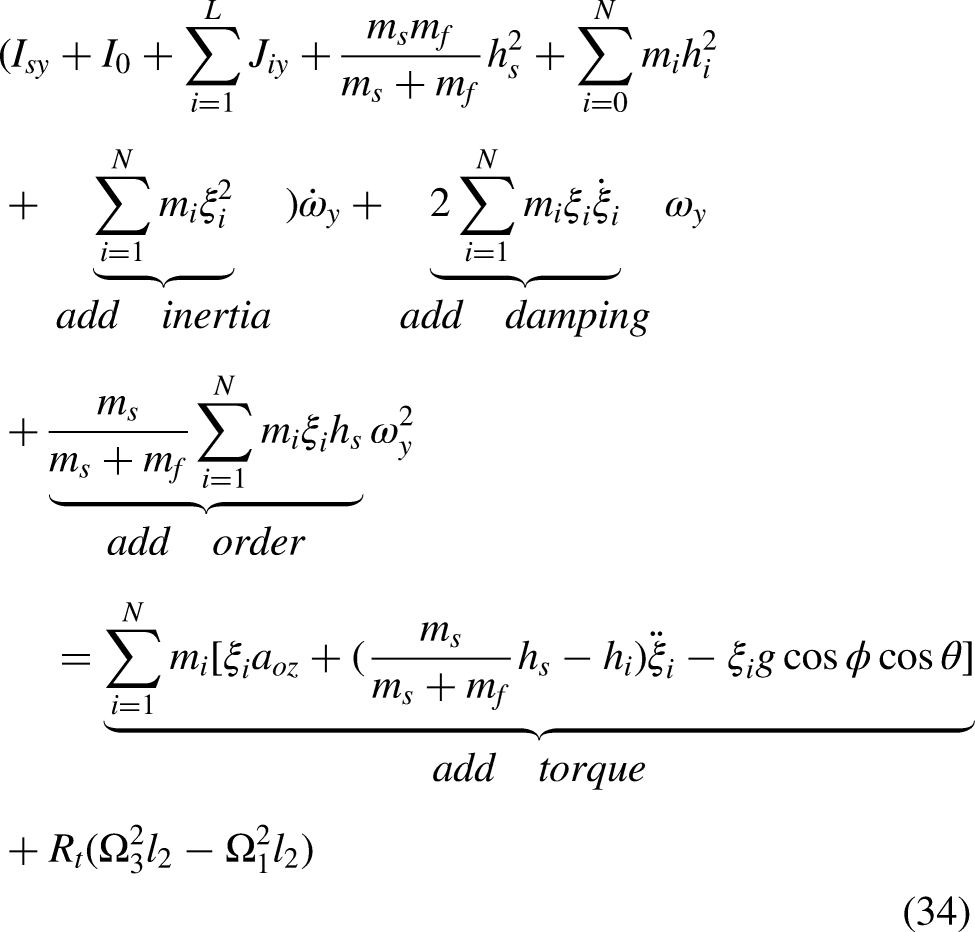

Non-linear effect of sloshing on the pitch channel of the LAS-UAV. (a) Percentage of additional inertia in final inertia. (b) Additional damping ratio. (c) Ratio of additional higher-order term. (d) Additional moment. (e) Pitch angle acceleration.
Equation (34) indicates that the additional moment consists of three parts. The history of each moment component is shown in Figure 6(a). The figure shows that the additional moment component caused by the offset of the center of gravity of the fuel plays a major role. The moment generated by the rotor lift causes the fuselage rotating, and the fuel rotates together under the action of tank viscosity. When the viscous force is less than the restoring force and the gravity component, the fuel slows down gradually until it slushes back, so the center of gravity offset changes from large to small, as shown in Figure 6(b), and the additional moment caused by the offset of the center of gravity is increasing at first then decreases. Secondly, the vertical inertia force is produced by the vertical acceleration of the body. When the airframe rotates, the vertical component of gravity in the airframe decreases, which makes the airframe produce a gradually increasing vertical acceleration under the rotor thrust, so the additional moment of vertical inertial force presents a gradually increasing process. Finally, the sloshing inertia force is generated by the fuel sloshing inertia, which is proportional to the sloshing acceleration shown in Figure 6(b) and always a minor part. The additional moment is coupled with the attitude control process, forming different dynamic characteristics from the simplified rigid body model.

Composition of the additional moment and slosh state during pitch operate of the LAS-UAV. (a) Additional moment compositions. (b) Slosh states.
LAS-UAV attitude controller
Because the main rotor does not participate in the attitude control, the Equation (35) is satisfied for rotor 5 and 6. The control of auxiliary rotors is similar to the conventional quad-rotor attitude control strategy. For rotors 1-4, Equation (36) is satisfied. Then Equations (35 and 36) form the speed constraint relationship.

Attitude control law design of LAS-UAV
The sloshing is difficult to measure, so the coupling effects caused by the fuel sloshing are regarded as unknown disturbance, and the parameter variation caused by the fuel consumption seen as the uncertainty of model parameters. The control object is obtained as shown in Equation (37). Among them, 
Since the sloshing displacement is bounded and satisfies the continuous sloshing dynamics, it can be considered that the sloshing variable satisfies the uniformly bounded and Lipchitz continuous conditions within a limited time. Taking the pitch channel as an example, assume the sloshing states satisfy the following conditions (the estimation of boundary is often reflected in the adjustment of control parameters):

The state-space form of the pitch dynamics is as follows:







And “sign” is a symbolic function. The
The cascaded continuous SMC is as follows
18
:


The relationship between rotor speed and control moment given by:


Simulation of LAS-UAV attitude control
Based on Simulink, the simulation analysis model of the attitude SMC and PID controller is realized. Through simulating and debugging, the main control parameters obtained by combining Equations (45 to 47) are shown as Table 2.
Main control parameters of the LAS-UAV.

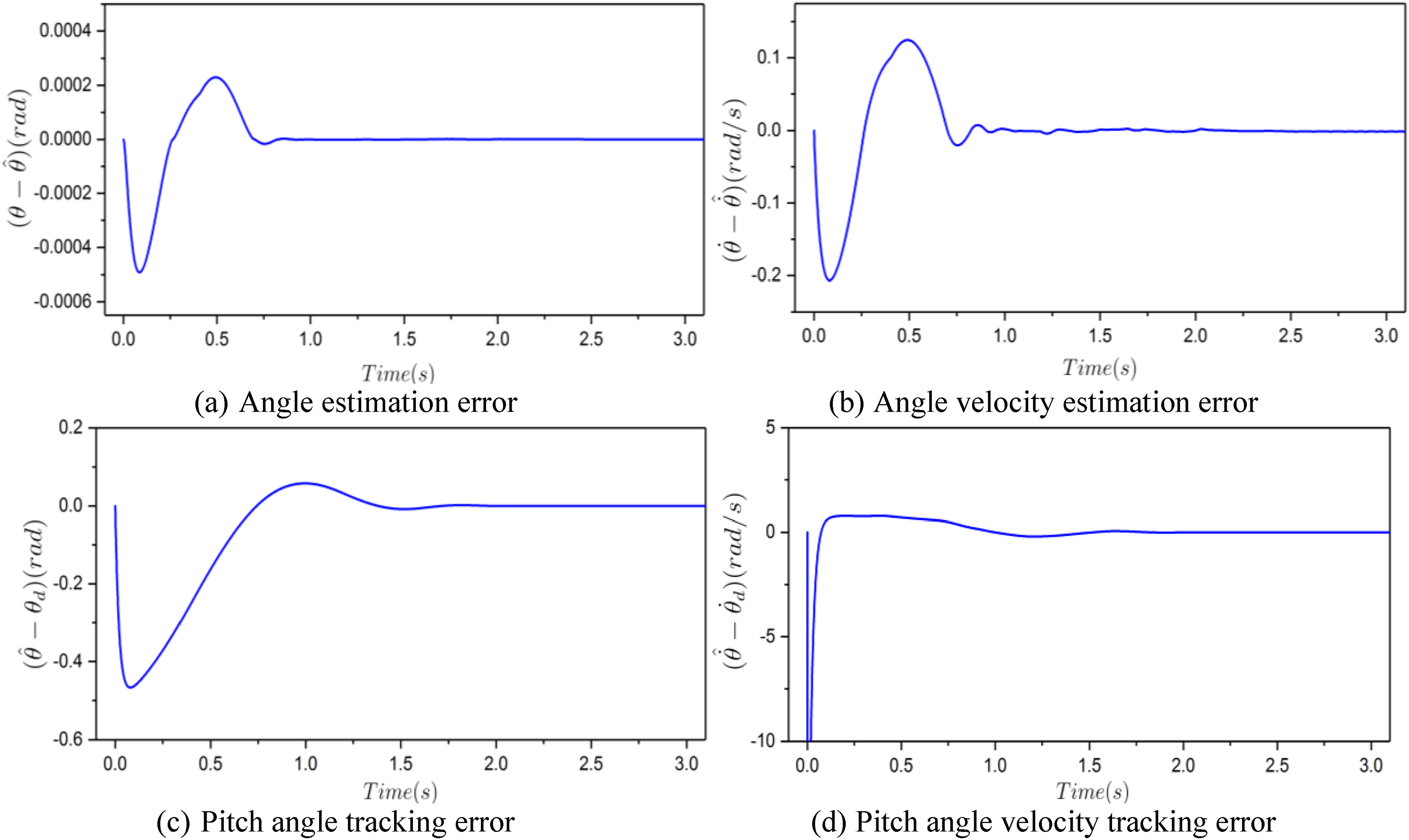
When the fuel is full, the step response of the pitch channel based on SMC is shown in Figure 7, in which the target pitch angle is obtained by the step signal filtered through the low-pass filter. The observation error of SMO and control error of SMC are shown in Figure 8. In Figure 8(a) and (b), the estimation error of angle and angular velocity converges within 1 s. In Figure 8(c) and (d), after an overshoot process, the pitch angle estimation enters into the steady-state after 1.7 s. At this time, the actual pitch angle tends to the target, and the pitch angle velocity decreases gradually. The fuel sloshing in Figure 9(a) shows a typical damping attenuation process. In Figure 9(b), the additional moment generated by the barycenter offset fully coincides with the output of the SMC after 2.5 s. So the pitch angle remains unchanged, the fuel sloshing naturally in the tank, and the energy dissipated depends on the internal damping. On the one hand, it shows that the effect of the fuel sloshing on the pitch channel is mainly reflected in the additional moment produced by gravity, which is consistent with the conclusion of previous analysis. On the other hand, it shows that the main reason why the step response of the pitch quickly enters into steady-state is that the SMC accurately estimates the additional moment generated by fuel sloshing, and timely eliminating the influence of sloshing on pitch channel.

Step response of the pitch during the first 3 s. (a) Angle estimation error. (b) Angle velocity estimation error. (c) Pitch angle tracking error. (d) Pitch angle velocity tracking error.
SMO and SMC error during the first 3 s. (a) Slosh displacement in the x direction. (b) Additional moment estimation.

Fuel sloshing displacement and estimation of interference during the first 40 s.
Then the pitch channel of the LAS-UAV is simulated under the SMC and the PID controller for full, half, and no fuel conditions respectively, and the simulation result is shown in Figure 10. The SMC has almost the same pitch angle response no matter how much fuel and the control performance is always better than the PID controller, which fully shows the advantages of variable structure control. The PID controller in the absence of fuel, due to the disappearance of sloshing, entering the steady-state is faster than half and full conditions. PID control characteristics are affected by sloshing and it takes the longest time to steady-state when fuel is full. The simulation results of three different fuel states also show that the PID controller can keep the system stable under different fuel fill ratio, but the performance is very different. It is verified that the optimal control parameters tuned online for a fuel state in the early flight test when the fuel mass changed, the control performance decreases. 19 It can be seen from the comparison of sloshing displacement in Figure 11 that the sloshing attenuation process of SMC is slower than that of the PID controller, which is due to the natural attenuation of sloshing with internal damping under SMC. The PID controller only outputs the moment to restrain the pitch angle change caused by fuel only after the angle error. At this time, the PID controller cannot estimate accurately the unknown disturbance, which makes the body rotate reversely, accelerates the energy consumption of sloshing, and attenuate faster. Comparing with Figure 11 and Figure 12, it can be seen that the output moment of the PID controller lags behind the additional moment, which is also the main reason for the long time required for the pitch to steady-state. In conclusion, the SMO and SMC can be used to overcome the influence of fuel sloshing and mass consumption on the attitude tracking, improve the control performance of the LAS-UAV, and ensures that the control system has good robustness.

Pitch angle step response with different fuel conditions during the first 30 s.

Sloshing displacement with different fuel conditions during the first 30 s.

Controller output moment with different fuel conditions during the first 30 s.
LAS-UAV altitude authority assignment controller
To solve the problem of control authority assignment under the power redundancy of altitude channel and improve the control performance, this section realizes the power assignment of engines and motors based on non-linear memoryless assignment.
Design of altitude authority assignment controller
On the one hand, the main rotors driven by the engines can generate a major lift, but has a slow dynamic response; on the other hand, the auxiliary rotors driven by the motors can generate a minor lift but has a fast dynamic response. The specific strategies are determined as follows: when the actual altitude is far from the target altitude, the required vertical acceleration is large, and the main rotors generate major lift; when the actual altitude is close to the target, the vertical acceleration of the target is small, the auxiliary rotor force the altitude quickly converge and keep at target altitude. The controller which controls the engine and motor power output according to the target vertical acceleration is called the altitude authority assignment controller. The function used in the altitude authority assignment controller is shown in Equation (54). The motor distribution acceleration 


Finally, part of the linear system can be expressed as Equation (57).

Model for control authority assignment based on non-linear memoryless function. (a) Simplified control model of altitude. (b) Popov criterion model.
It is verified that the object

Popov criterion graph with different controller parameter k.
In Figure 14, when 

Simulation of altitude authority assignment control
Determine k by minimizing the settling time of the altitude channel. The changing trend of settling time with different parameters is shown in Figure 15. In this paper,

Change trend of the altitude channel settling time with different controller parameters k. Normalized by maximum settling time.
Simulation of waypoint flight
The position and velocity PID controller are designed according to the Ref.,
19
with the attitude SMO, SMC, altitude authority assignment controller are used to realize the waypoint flight simulation of the LAS-UAV. The waypoint sequence used in the simulation is:

Multi state tracking process in waypoint flight considering the influence of sloshing. (a) Flight path of the LAS-UAV in waypoint tracking (AAAC: Altitude authority assignment controller). (b) Velocity tracking in waypoint flight. (c) Angle tracking in waypoint flight.
Figure 17 shows the displacement of sloshing in the simulation and the estimation of the additional moment generated by the fuel barycenter offset. In the previous period, the output moment of the controller changing greatly because of the attitude adjustment. After about 5 s, the SMC estimates the external disturbance caused by the sloshing, and compensation moment maintained the attitude of the LAS-UAV. The control authority between the engine and the motor is shown in Figure 18. When the LAS-UAV is climbing rapidly, the engine provides the main lift, that the vertical acceleration generated by the engine increases significantly at 30 s, while the control authority is given to the motor mostly in small amplitude altitude adjustment, that the motor is responsible for the main acceleration when the target vertical acceleration is small (at 0 and 15 s).

Fuel sloshing displacement and estimation of the disturbance. (a) Sloshing displacement. (b) Additional moment estimation.

Vertical acceleration generated by motor and engine during waypoint flight.
Conclusion
To reduce the adverse effects of fuel sloshing on dynamics and control of the LAS-UAV, and the problem of power redundancy of the altitude control, the non-linear dynamic model of the LAS-UAV considering the fuel slosh dynamics is established, and the control strategy of LAS-UAV is designed. The feasibility of this control strategy is verified by flight simulation, and the following conclusions are obtained:
The fuel has an obvious effect on the dynamic characteristics of the vehicle, which is mainly reflected in the form of the additional moment. The main components of the additional moment are the moment generated by the offset of the center of gravity caused by fuel sloshing. The attitude control simulation results under different fuel quality show that the control effect of the SMC with SMO is better than that of the PID controller, and the performance is not sensitive to fuel sloshing and consumption. The attitude controller improves the control accuracy by estimating and compensating the additional moment caused by sloshing. The altitude authority assignment controller provides a feasible allocation scheme to solve the problem of altitude power redundancy, and makes the altitude channel have a shorter settling time and faster convergence rate than the situation with only engines. When LAS-UAV climbs rapidly, the engine provides main lift, and the vertical acceleration generated by the engine increases significantly, while the control power is mainly granted to the motor during small amplitude and high precision altitude adjustment. The control strategy of the attitude controller based on the SMC with SMO combines with the altitude authority assignment controller for the LAS-UAV have better control performance than the classical PID controller with only engines, which is embodied in smaller overshoot, smaller steady-state error, and shorter settling time. It provides a feasible solution for the engineering application of the LAS-UAV.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.