
Abstract
The nominal aerodynamic parameters of aircraft are often approximate and aircraft may experience high value of angle of attack/sideslip perturbations during their manoeuvres. Preventing instability and air crash requires a robust controller capable of containing the dynamic uncertainty and the perturbations. In this respect, the problems of roll control in such a situation are studied and a better choice of sliding surface is proposed. Sliding mode control manages the uncertainty and adaptive fuzzy is employed to shape the transient response. As a result, a setup is formed which outperforms the basic controller both in terms of transient speed, response robustness and control effort. The strength of the method is more appreciated in case of high angle of attack/sideslip perturbed manoeuvres. This is proved theoretically and illustrated by simulations.
Introduction
The aim of an aircraft control loop is to enforce accurate tracking of the ordered lateral-directional and longitudinal commands in all intended flight manoeuvres over a wide range of working conditions. A well-tuned feedback control law is expected to suppress external disturbances (e.g. wind gusts) and to reduce sensitivity to the aircraft parameters’ variations (robustness against parametric uncertainties).
Design of an aircraft control is tough due to nonlinearity, coupling and time varying characteristics of the system 1 and strong dependency of the system parameters to the working conditions, i.e. angle of attack/sideslip. Nevertheless, gain scheduling (GS) approach is traditionally employed where the system dynamic around each axis is linearized and the proportional-integral-derivative (PID) controller is independently utilized for each axis. Success of the design depends on the precise definition of the type of operation so that the neglected dynamic and cross-couplings among variables to be adequately small. Apart from that, a lot of more sophisticated approaches such as: fuzzy logic (FL), 2 intelligently tuned µ-PID, 3 robust, 4 intelligently tuned fractional order PID, 5 sliding mode, 6 H∞, fractional order PID, 7 dynamic inversion, a combination of model inversion with an online adaptive neural network, a nonlinear adaptive design based on backstepping, neural networks and RBFNN-based adaptive design 8 have also been studied. The main goal in all of the newly developed methods is flight envelope extension and manoeuvrability improvement.
Sliding mode control (SMC) has been commonly used in aerospace, 6 process control, power control and robotics to administer dynamic and disturbance perturbations. However, SMC results in a high switching gain particularly when the system uncertainty band is large. This may cause degradation of the steady-state performance and system failure due to mechanical vibrations. The problem has well been investigated,9,10 and modifications have been developed, e.g. instead of using fixed switching gain, various adaptive nonlinear gain algorithms have been introduced.11,12 By integrating adaptive fuzzy and SMC, various types of interesting methods are formed. 13 In Amieur et al., 14 adaptive fuzzy SMC (AFSMC) alongside with feedback linearization has been explored. Application of AFSMC for a flexible robot 15 and a hypersonic vehicle control has also been reported. 16 For a simplified F/A-18 aircraft model, a nonlinear AFSC is designed for trajectory tracking during aircraft manoeuvres. 17 Application of integral back stepping SMC has also been elaborated in Jia et al. 18 In Su et al., 19 a combined backstepping and dynamic surface control for adaptive fuzzy-state feedback control has been investigated. A novel adaptive fuzzy gain-scheduling sliding mode control (AFGS-SMC) method for attitude regulation has been addressed in Yang et al. 20 Adaptive fuzzy multi-surface sliding control (AFMSSC) for trajectory tracking of an MIMO aerial vehicle has been detailed in Norton et al. 21 In Rubagotti et al., 22 integral sliding mode controller for reducing disturbances is the subject of study. A nonlinear sliding mode controller using bifurcation for commanded spin of an aircraft is given in Rao and Sinha. 23 Employing robust SMC approach to deal with nonlinear uncertain behavior of actuator of micro aerial vehicles (MAV) are the subject of investigation in Guruganesh et al. 24 Adaptive sliding control law for managing the atmospheric environment of Mars airplane is detailed in Liu et al. 25
In this paper, the uncertainty in the aerodynamic parameters of an aircraft and its negative influences on an already designed roll controller are investigated. It is shown that in a low angle of attack/sideslip manoeuvring, the effect of uncertainty is almost entirely confined by the basic controller. However, this is not true when the vehicle is thrown into a high angle of attack/sideslip conditions by known or unknown disturbances. A type of condition realized that it might end up in the so-called unstable falling leaf motion. In this respect, by appreciating the past investigations, a modified sliding surface by a weighted combination of roll rate, p, and sideslip angle, β is introduced which yields better transient response at lower control effort. The performance is more improved when SMC is modified to a special AFSMC configuration. It is shown that the method is capable of providing safe and reliable flight motion in spite of 30% tolerances in the aircraft roll aerodynamic parameters and against high value of angle of attack/sideslip perturbations. This is proved theoretically and illustrated through extensive simulations.
The paper table of contents is as follows:
Aircraft control: Equation of motion, Aircraft control, Roll aerodynamic uncertainty. Robust roll FSMC control: SMC design, Adaptive k using adaptive fuzzy algorithm. Simulations Conclusion
Aircraft control
Generally, longitudinal and lateral-directional motion of an aircraft is governed by the three main control urfaces: elevators, rudders and ailerons. Longitudinal or pitch axis control is directed by the symmetric deflection of the elevators. Deflection of the ailerons manages the roll, and the lateral-direction (yaw) motion is managed by the joint rudder-aileron action.
Equations of motion
The six-degrees of freedom nine-state mathematical model of an aircraft are expressed in a nonlinear state space form as follows



The three moment equations which are directly related to the aerodynamic parameters are given below
1

Some of the system parameters taken from the F/A-18 fighter airplane have been depicted in Table 1. The other parameters involved are Cl, Cm and Cn which are aerodynamic roll, pitch and yaw coefficients, respectively. These parameters are nonlinear functions of the system variables and often vary as flight condition changes.
Aircraft parameters.1

Considering the nonlinear dynamical equations (1) and (2), significant coupling among roll and yaw and sideslip is noticed and the model contains most of the nonlinear characteristics of the system to be used for unstable mode simulations.
For the purpose of control design, the aerodynamic coefficients, mainly derived experimentally, are stated in terms of approximate polynomial equations such as the one for Cl as below
1
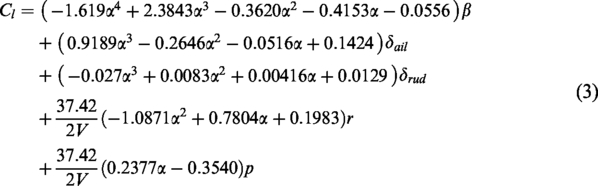
By substituting Cl in ṗ (equation (1)), the roll rate nominal equation is obtained as follows


This is one of the nine equations stating the nonlinear, coupled and time varying (due to change in mass and v) behaviour of the simulated system. Any designed controller is expected to be able to offer stable and safe flight considering the family of the equations similar to equation (5).
Aircraft control
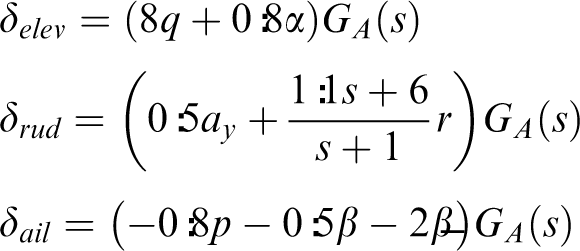
The simplified basic flight control of the F/A-18 aircraft is as follows
1
Later on, due to several high angle of attack perturbation related air crashes,it is realized that the controller is not qualified for stopping the so-called unstable falling leaf motion, a type of out of control action with a large coupled oscillations in p and r along with substantial fluctuations in α and β.
1
During large angle-of-attack/sideslip motion, the dihedral effect (roll caused by sideslip) of the aircraft wings becomes extremely large and the directional stability becomes unstable.
1
Therefore, to manage the instability, the basic control law

Further investigations in improving the response of the aircraft in facing falling leaf, led to the control signal

Roll aerodynamic uncertainty
It is natural to assume approximation in the values of the parameters of equation (1). For roll control, the engaged equation is


To model the uncertainty for the simulation purpose, a family of random systems may be generated using either of the following two approaches. In the first method, randomness is applied to the aerodynamic parameters of equation (3) (and similarly to the parameters of Cn) which consequently renders a set of random ṗ (6) equations. The effect of Cm uncertainty in ṗ is around 2% when compared with Cl uncertainty. To illustrate the effect of uncertainty on the parameters of equation (6), Kail and Kβ versus α have been presented in Figure 1(a) and (b) where α ranges from −0.5 to 1.5 radians. To produce realistic random systems, kail>0 and Kβ<0 constraints have also been applied. As the figures indicate, 10% variation in the coefficients leads to drastic large tolerances at higher α values. Alternatively, the uncertainty may be applied directly to the parameters of equation (6) instead of equation (3) which yield more realistic random systems. The result of applying 30% uncertainty to the K parameters of equation (6) has been shown in Figure 1(c) and (d) which looks more appropriate for the uncertainty evaluations.
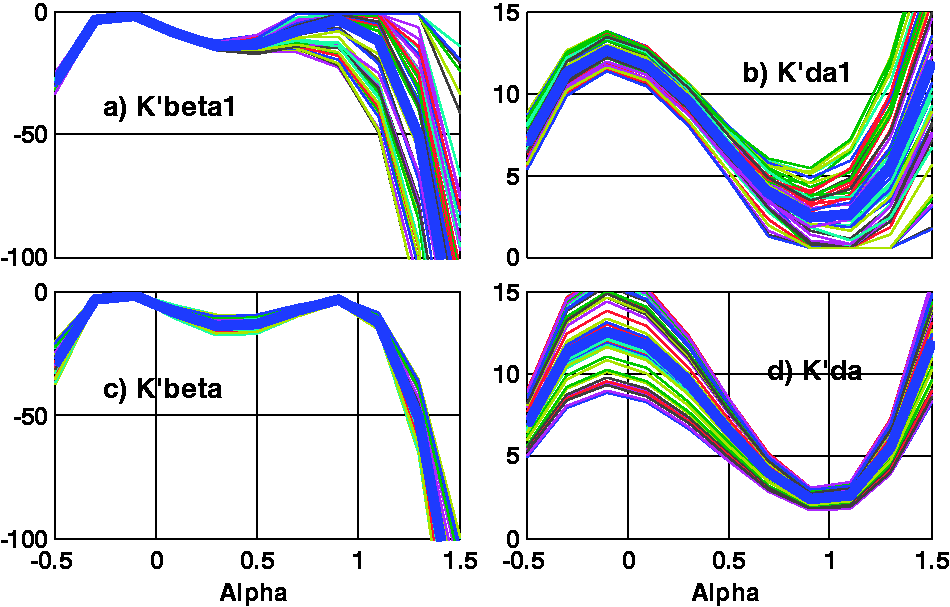
Uncertain Kβ and Kδail parameters of ṗ (6). (a) K’beta1, (b) K'da1, (c) K'beta and (d) K'da.
Now, the prime question here is that how any randomness in the parameters of equation (6) alters the roll response and flight performance. As the figures indicate, in low angle of attack, there might be no significant operation degradation, but it may not be true when the aircraft is entangled with a high angle of attack perturbations.
Robust roll FSMC control
In our simulations, it is shown that the basic control law fails in securing flight performance in face of tolerances in the p parameters (equation (6)) when the vehicle experiences some high angle of attack/sideslip perturbations. Hence, modifications to the controller or a new controller are required. For combating dynamic uncertainty, SMC is a controller of choice that cannot be ignored particularly when the size of ambiguity is supposedly unknown and large.
The block diagram of the proposed adaptive fuzzy sliding mode controller is shown in Figure 2, which consists of the system, sliding mode controller, fuzzy system and adaptive algorithm.

Block diagram of the adaptive fuzzy sliding mode controller.
SMC design
To start with SMC control design,20,21 the past investigations leading to the basic control law is appreciated and a new variable, z is introduced by a weighted combination of p and β as follows

The dynamic equation of the new variable is composed by employing ṗ from equation (6) and 
Remarks
The uncertainty is only applied to the roll-related aerodynamic parameters Cl and Cn and the other aerodynamic parameters attain their nominal values.
Assumptions:
Other than the
Note that the stability of β directed by the nominal system rudder closed loop control (Remark 2); the asymptotical stability of p is definite if a control action forces to zero the tracking error function



To develop such a stabilizer, under constant trim condition, ṡ is calculated

The aileron control signal stabilizing the nominal system using feedback linearization is obtained as follows


Applying both continuous and switching control law to the system results in

Equation (14) is negative definite and asymptotical stability is ensured for adequately large k if the following conditions are met


Adaptive k using adaptive fuzzy algorithm
The problem of SMC chattering is relatively mitigated by using saturation instead of switching (equation (16)). However, better performance is also expected if adaptive k is used by estimating
The inputs to the fuzzy system are sliding surface, s and its derivative, ṡ. Each of the inputs is fuzzified through a three-membership function fuzzifier, Figure 3(a). The output, defuzzifier, is composed of a nine-membership function set with adaptable membership functions centres, c1 to c9, Figure 3(b).
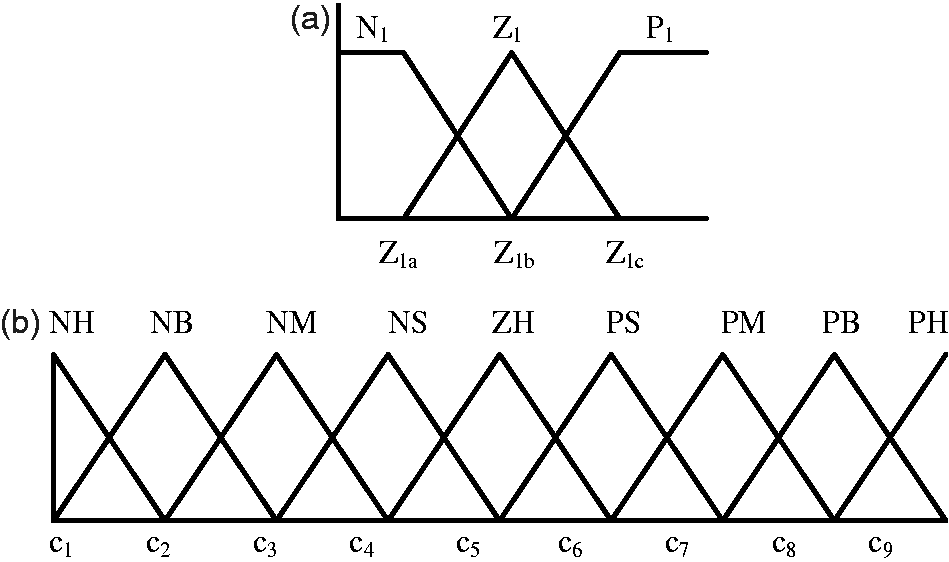
Membership functions of (a) s and ṡ and (b)
A set of nine rules composes the fuzzy inference rule bank, shown in Table 2. They are formed using the following abbreviations:
The fuzzy inference rules.

N: Negative; Z: Zero and P: Positive
H: Huge; B: Big; M: medium; S: Small
The k1, k2 and 
Let 

Now, by using equations (12) and (13), the following results are obtained

Next, by adopting the adaptation law



The γ parameter is related to the adaptation rate. By this provision, the level of switch control is no longer constant but depends on the error values defined by s and ṡ.
Simulations
The system (equation (1)) is simulated using parameters depicted in Table 1 and aerodynamic parameters reported in Chakraborty et al. 1 Apart from the nominal system, a family of 50 randomly generated systems with 30% tolerance in the K* parameters of equation (6) is produced.
The performance of the basic and the proposed AFSM controllers are evaluated in maintaining reliable and secure flight operation in spite of the aerodynamic parameter uncertainty under high angle of attack/sideslip perturbations. The basic controller can handle system uncertainty well under low angle of attack flight running. However, in facing a type of manoeuvre reported in Chakraborty et al.,
1
which may lead to falling leaf instability, serious problems occur. One of such operations occurs under the following working point (trim values)

Four sets of initial condition perturbations are considered (Remark 3). The first one is a high angle of attack and sideslip perturbation given by the following vector

First, a nonrealistic simulation with no bound on the aileron deflection angle is performed. The responses of the two controllers have been presented in Figure 4. The AFSMC parameters are w = 4 and λ = 2. As it is noted from the graphs, the proposed controller stables the system faster with lower control effort than what the basic controller demands.

The performance of AFSMC (left) and the basic controller (right) in stabilizing the family of random systems against high α and β perturbations in a non-realistic simulation (no limit on the aileron deflection angle).
Imposing a bound on the aileron deflection (−25° to 45°) 1 and repeating the test under similar conditions render performances portrayed in Figure 5. Faster response and more coherent behavior, which is expected from a well-designed robust controller, is achieved For the sake of conciseness, the other stable states are not shown.

The performance of AFSMC (left) and the basic controller (right) in stabilizing the family of random systems against high α and β perturbations.
The superiority of using z instead of p in forming the sliding surface has been illustrated in Figure 6. By using w = 0, the sliding surface based on z = p is formed. The response of the system with λ = 2 has been depicted in Figure 6 (left). This shows how the system behaviour ends up in instability and flight failure. The same test is repeated with λ = 0.1 (slower convergence) by which the system stability is restored. Therefore, the sliding surface based on z, yields faster transient response without stability compromise.

The AFSMC response with w = 0 and λ = 2 (left) and with w = 0 and λ = 0.1.
In the second test, the initial condition


The performance of AFSMC (left) and the basic controller (RIGHT) in stabilizing the family of random systems against high α and medium β perturbations.
The third test is conducted under the following initial condition


The performance of AFSMC (left) and the basic controller (right) in stabilizing the family of uncertain systems against medium α and high β perturbations.
Eventually, the last test is conducted under the initial condition of


The performance of AFSMC (left) and the basic controller (right) in stabilizing the family of uncertain systems against medium α and β perturbations.
Conclusion
In this paper, the sensitivity of an aircraft roll control to the approximation in its aerodynamic parameters under high value of angle of attack and or sideslip perturbations are discussed. It is shown that at low values of perturbations, the performance of the already designed controller can be viewed acceptable and the flight performance is not degraded substantially. However, under high angle of attack/sideslip disturbances, like those that may end up in the falling leaf instability, the effect of approximation and uncertainty is substantial to the extent that it may cause air crash. In this respect, a novel sliding surface by a weighted combination of p and β is suggested. SMC is designed to contain the adverse effect of randomness in the system dynamic. The smoothness of the behaviour is managed by an adaptive fuzzy section that estimates the level of uncertainty and applies nonlinear switching control gain. As a result, the proposed controller enjoys performance that is more robust and delivers faster transient response with respect to the basic controller under various initial condition perturbations. This is proved theoretically and verified through extensive simulations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work has been partially supported by the research department of Shahed University.