
Abstract
Micro air vehicle research has exponentially expanded since the first articles began to be published in the late 1990s. This article presents a comprehensive bibliometric review of journal articles published on micro air vehicle research from 1998 until 2015. The articles are classified into three types of micro air vehicle: fixed-wing, rotary-wing, and flapping-wing (biomimetic). These types are based upon their primary means of generating lift and propulsive thrust. The specific type of research in these articles is also examined, divided into subcategories of: aerodynamics; guidance, navigation, and control; propulsion; structures and materials; and system design. Numerous bibliometric indicators are presented and analyzed to understand how micro air vehicle research is expanding, which authoring organizations are leading the research, which external sponsoring organizations are providing funding, and the challenges that remain for future researchers. The analysis shows that the majority of the research articles are being written by organizations from the US, China, UK, France, and South Korea. Although biomimetic micro air vehicles are currently the most popular type of micro air vehicle, in recent years the growing popularity of rotary-wing micro air vehicles (especially as a guidance, navigation, and control test platform) has caused it to rival biomimetic micro air vehicles in popularity.
Introduction
Research of micro air vehicles (MAV) is a growing area of interest that is being conducted by commercial industries, governments, and universities around the world. Analyses of objective bibliometric indicators allow us to gain insight on how this research is expanding and maturing. Our goal is to compile and share this knowledge so that researchers are able to make informed decisions on future objectives and collaborate with others in the field.
The first MAV feasibility study by the RAND Corporation in 1994 concluded that MAV had great potential for military applications. 1 This inspired the US Defense Advanced Research Products Agency (DARPA) to fund additional studies in 1996. Although there were many biological studies on flying insects and birds that implied a future intention to design bio-inspired aircraft, the use of the term MAV did not become commonplace until after this time. Although there is no definitive size or weight restriction that universally defines a MAV, the most commonly cited definition was published in a Broad Agency Announcement (BAA 97-29) by DARPA in 1997. This defined MAV as being less than 15 cm in any dimension. DARPA initiated a new program for an even smaller type of aircraft in 2005 (BAA 06-06) calling these nano air vehicles (NAVs). NAVs are defined as being less than 7.5 cm in any dimension and 10 g (carrying a 2 g payload) in weight. These air vehicles push the limits of flight in the low Reynolds number regime, requiring new research in designing optimization procedures; lightweight structures and materials; microelectronic devices; and aerodynamic modeling tools. In this article, we do not distinguish NAV and group them in with the broader MAV classification.
MAV are of interest due to their potential of performing a wide range of civilian and military limited-duration missions. Their small, physical size enables them to easily be transported to a launch site and remotely flown by a single operator. This makes them ideal for investigating hazardous situations (e.g. chemical spills, gas leaks, etc.) in either open or partially confined areas. Their size also makes them difficult to visibly detect, making them useful in police or military surveillance missions. Therefore, MAV provide a convenient and safe way to conduct missions that are currently impossible to do with any other current device.
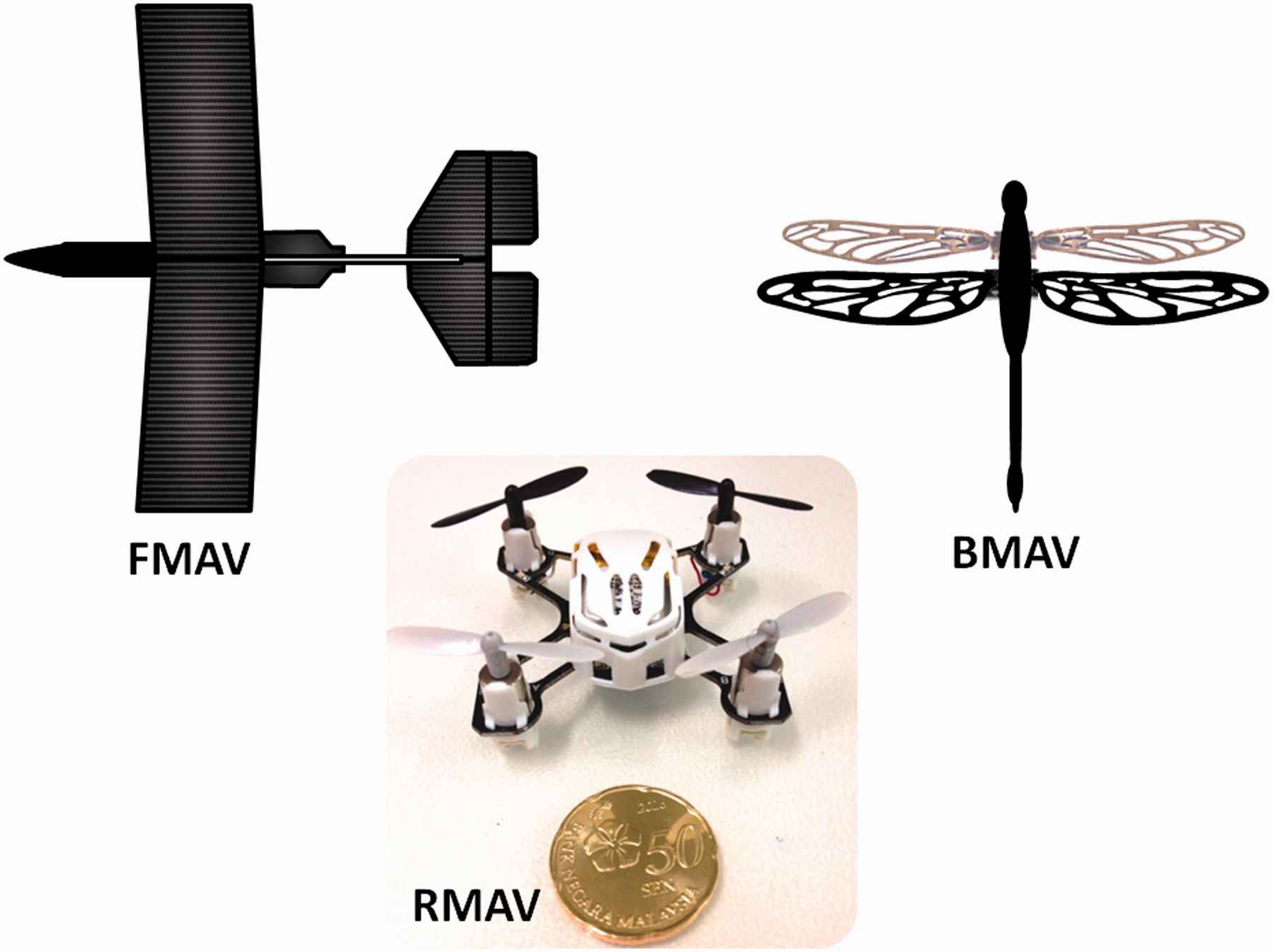
There are three categories of MAV as illustrated in Figure 1. They are distinguished according to their means of generating propulsive thrust and lift: fixed-wing (FMAV), rotary-wing (RMAV), and flapping-wing (also called biomimetic or BMAV). FMAV generally appear as micro-sized, conventional airplanes. Most FMAV designs produce thrust by using a propeller-driven electrical motor, although alternative systems have also been used. Lift is generated by airflow over non-moving wings that have airfoil cross sections. This generally limits the direction of flight to forward motion. RMAV are functionally similar to helicopters or hovercraft. Lift and thrust are generated by spinning rotor blades. The necessity of these rotors to efficiently generate aerodynamic forces places a limit on how small they can be made. The rotors must have enough surface area to produce a sufficient magnitude of aerodynamic forces. The use of multiple sets of rotors (e.g. quadrotors, hexarotors, etc.) increases the lift and thrust they are able to generate. By spinning the rotors in opposite directions (in a balanced manner), the RMAV can be easily stabilized and the rotation of downwash air minimized. This makes multiple rotor aircraft easy to remotely pilot (maneuver and hover). BMAV are bioinspired from the flapping wings of insects, birds, or bats. Lift and thrust are achieved by flapping the wings. Flapping the wings generates a greater force per wing surface area. Therefore, a BMAV has the potential to be much smaller than either FMAV or RMAV. The flapping frequency depends on the wing surface area. For example, dragonflies must flap at approximately 30 Hz, while bees (which have much smaller wing-to-body ratios) must flap at 200 to 250 Hz.
The flight agility (e.g. hovering and forward flight) of RMAV and BMAV allow them to be potentially used in spatially compact areas or even indoors. There has been substantial research on swarm technology (especially with RMAV), which would enable multiple MAV to work together using integrated navigation and search algorithms to conduct a variety of missions over broad areas. MAV (especially BMAV) made with low cost and biodegradable materials are also being researched. The intention is to make them disposable and suitable for one-way missions. Not having to fly a return trajectory would effectively double their flight endurance and range, improving upon one of the primary limitations of MAV.
Objectives
This article presents a comprehensive, bibliometric investigation of existing journal articles pertaining to MAV research that were published between 1998 and 2015. An inventory was created of all relevant journal publications and this was used to investigate details of their authorship (organization and geographical location), citations, and funding sources. This was done to gain a better understanding of the direction that this research has taken, who is involved, and to determine the pace of research in specific areas (in other words which areas are rapidly progressing and which are stagnating). Specifically the objectives of this article are to:
define the distribution of articles and citations from 1998 to 2015; discover the major authoring organizations publishing journal articles on MAV; determine which journals most MAV authors choose to publish in; identify the major funding sources of this research; and gain insight into how this research is distributed among the three classifications of MAV: FMAV, RMAV, BMAV.
The overall intention of this review article is to highlight the important potential of this technology and provide insight to both academic researchers and industry designers as they determine their strategic role in advancing this research forward.
Bibliometric methodology
Our methodology began by constructing a dimensional fact model (DFM). An overview of this model illustrating the fact schemas is shown in Figure 2. This model is loosely based on the model described by Ferrara and Salini
4
for bibliometric analysis when dealing with multi-dimensional data. There are two main categories: data description and text analysis. “Contribution” is the main fact comprising the data description, but it also includes “sponsorship” from external funding sources. The contribution records that an author (or group of authors) affiliated with organizations, produces a peer-reviewed journal article on MAV, which is published in a given year. In our methodology, we do not consider the individual authors, but instead focus only on the authoring organizations. (The method in which specific MAV articles are distinguished from a corpus of publications is described in the next paragraph.) The goal of the second category of “text analysis” is to describe the contents of MAV research. The main fact is the occurrence of a descriptor (or key word) in a MAV journal article. The MAV article will normally focus on a specific type (e.g. FMAV, RMAV, or BMAV). Also, the article will focus on a specific research area (e.g. aerodynamics, materials or structures, propulsion, etc.).
Overview of dimensional fact model.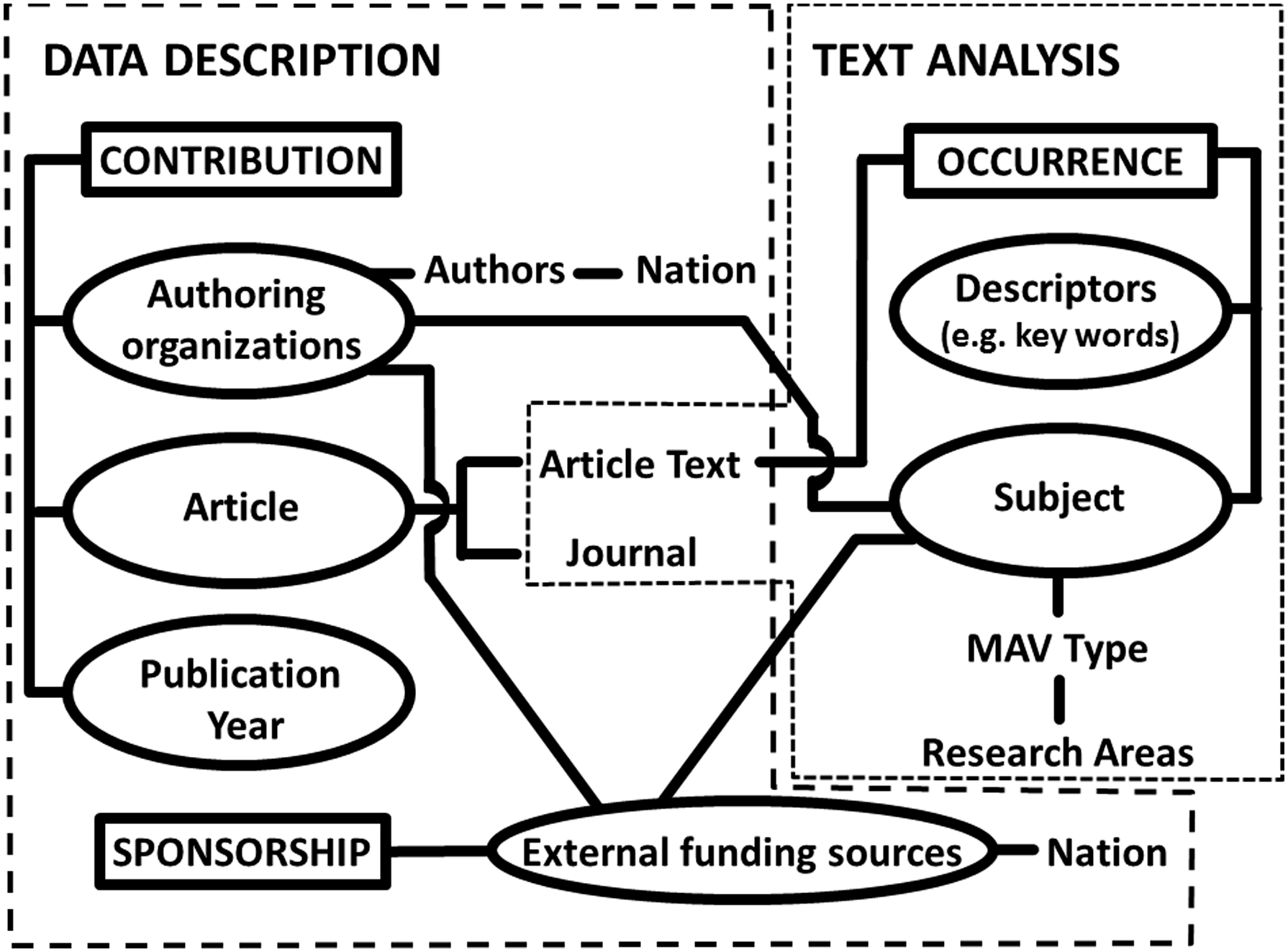
A quantitative synthesis was performed by reviewing all of the journal articles related to MAV research over a 17-year time period (from 1998 to 2015). An extensive search for MAV-related publications was performed on the Thomson-Reuters Web of Knowledge databases using the key word descriptors shown in Figure 3. This figure also shows the process used to identify, screen and determine the eligibility of the MAV articles. This approach is similar in concept to the lexical search methodology used by Gorjiara and Baldock
5
to extract data from the Web of Science (WoS) databases.
Research article identification and screening process for quantitative synthesis.
Although the lexical method is a commonly used search method, its major drawback is susceptibility to subjectivity when the descriptor words are selected by experts. 6 In other words, there is a risk that relevant articles exist that do not correlate with the set of key words. This would cause them to be unintentionally filtered out. In order to minimize this, we selected broad, generalized descriptor search phrases (Figure 3). Of course, the downside of this approach is the inclusion of many irrelevant articles. Our initial search yielded 5783 publications. After an initial, manual review of these articles, it was discovered that a large portion were from medical databases that discussed research about unrelated MAV acronyms (e.g. Myeloblastosis-associated virus). These databases were excluded, leaving only the Thomson-Reuters Web of Science (WoS) core collection. This reduced the number to 3860 publications. A new criterion was needed to reduce this vast amount to a more manageable quantity. Since journals are normally considered as the most reliably vetted source of information, the search was narrowed to only accept peer-reviewed journal articles. After excluding all non-journal publications (editorials, proceedings and conference papers, text books, thesis, etc.), the number was reduced to 2184 journal articles.
The content of all of these articles was then independently, manually reviewed by the first three authors of this article to determine if it was indeed a MAV (using the DARPA criterion previously described). For most articles, all three authors came to the same obvious conclusion. In order to settle the few differing opinions, the authors met together and examined each of these articles in detail. This was done until unanimity was reached. Numerous additional articles (1336) were eliminated in this laborious process. Many of the articles rejected were about unmanned air vehicles that did not meet the DARPA size and weight definitions for MAV. A few articles rejected presented biologically inspired research that had only an indirect relevance to BMAV. Biological articles were only included, if the focus was on some aspect that could be actively exploited for a BMAV. Interested readers are referred to our previous review article 7 that examined Biomimetic Air Vehicles (BAV) research. This article reviewed bioinspired flapping wing aircraft, which included BMAV as well as larger “non-MAV” aircraft.
The 848 journal articles that remained provide a statistically significant basis for the bibliometric analysis shown in this article. Each of these articles was manually categorized (using the same three-person check process already described) into specific types of MAV: Fixed-wing MAV (FMAV), Rotary-wing MAV (RMAV), or Biomimetic MAV (BMAV). Of these, 17 articles (about 2%) were judged to not focus on one specific MAV type and so were classified as “General”. Each of the articles was also manually reviewed to subcategorize them by specific research area (discussed later in this article).
Bibliometric results
The 848 MAV articles are investigated with respect to the bibliometric indicators of: publication year, citations per year, worldwide distribution of the research, authoring organizations, specific journals, and funding sources.
Distribution of articles by year
Figure 4(a) shows the number of MAV articles published globally each year. This number shows a fairly consistent growth with just a few slight declines. Figure 4(b) shows how this distribution is divided out by MAV type. In the early years (1998–2007), research primarily focused on FMAV. The number of FMAV and BMAV publications is about the same from 2002 to 2005. Starting in 2008, BMAV overwhelmingly became the dominate type of MAV being researched. There is virtually no research in RMAV until 2003. Interest steadily increased in RMAV research at a slow rate, eventually surpassing FMAV and catching up to BMAV research in 2014. This trend implies that RMAV could perhaps surpass BMAV and become the most popular MAV in the future. Overall, BMAV research accounts for 45% of all the journal publications while FMAV and RMAV account for 29% and 24%, respectively. About 2% of the publications are related to general MAV topics, which could include more than one MAV type.
Yearly distribution of MAV journal articles. (a) Total MAV publications per year. (b) Breakdown of publications by MAV type.
The bar chart in Figure 5 shows the total number of citations in other publications that have been received by all of the MAV articles each year. Naturally, the citations lag behind the publication dates. Because of this lag, it is difficult to predict the citations trend for the later years. The expectation is that citations will grow as the articles (especially the large number of recent ones) become more widely read. Overall, BMAV articles account for 50% of all citations, followed by FMAV and RMAV articles which account for 27.6% and 21.8%, respectively.
Citation distribution of all MAV journal articles.
The pie chart in Figure 5 shows the citation breakout by MAV type. Figure 6(a) to (c) shows the citations (overlapping a bar chart that shows the number of articles) broken out by MAV type. It is interesting to note that although the number of FMAV publications dominated in the early years, the BMAV articles written in 1998, 1999, and 2002 received more citations. However, BMAV articles written in 2000, 2001, and 2003 received no citations. Citations for BMAV articles written after 2004 dominate with just two exceptions. One exception occurs for the BMAV articles written from 2006 to 2007, which are surpassed by citations given to the FMAV articles written during that same period. The other exception occurs in 2013, when the RMAV articles written in that year received more citations. This again shows waning interest in FMAV, the dominance of BMAV, and the growing popularity of RMAV research in modern times.
Distribution of publications and citations for the different MAV categories. (a) FMAV; (b) RMAV and (c) BMAV.
As shown in the following sections, there is a rising interest level in these vehicles by both the commercial and defense sectors. This is the case even though the production of operational MAV has still not materialized in any significant numbers. MAV are still largely in the research and development stage. Development is difficult because of the need for lightweight mechanisms, power sources, navigation electronics, and computational processing. An example of one such difficulty is the desire to use lightweight, piezoelectric actuators for BMAV flapping-wing mechanisms. Although they offer great potential, they require additional heavy step-up power conversion electronics. As technology advances and creates more electronics options, it is expected that more MAV articles will appear.
Distribution of articles by specific research areas within each MAV type
Figure 7(a) to (d) shows the distribution of articles by specific research area for each of the three types of MAV and for the general category. The research areas are grouped into five general categories: system design, aerodynamics, guidance and control, propulsion, and structures and materials. Although some articles focus on more than one research area, they were categorized based on their primary focus. [Note: There were no RMAV articles found that primarily focus on structures and materials.] Articles in which multiple subjects are treated with equal focus were categorized into system design. These articles generally focus on the overall design of the aircraft as their objective. Aerodynamic articles generally dealt with measuring (e.g. wind tunnel experiments or flight testing), simulating (e.g. computational fluid dynamics), or mathematically modeling the aerodynamic forces involved with different aspects of MAV designs. Guidance, navigation and control (GNC) articles cover flight dynamics and stability, control surfaces, navigation, and formation flying (e.g. swarming multiple MAV). Navigation is done via a global positioning system receiver (GPS), inertial navigation unit (IMU), visual-based algorithms, or several other methods. Propulsion articles focus on the engine (or electrical motor), flapping wing mechanism, flapping wing kinematics, or components of the propulsive system (e.g. rotors, energy storage system, etc.). While there is generally some overlap with aerodynamics (especially with rotors or flapping wings), this category is distinctive in that it has the overall propulsive system as its primary focus. Lastly, articles categorized in the structures and materials research area are primarily concerned with the development and/or structural performance of ultra-lightweight materials and structural designs of the MAV wings and fuselage.
Distribution in specific areas of research for each of the MAV types. (a) FMAV, (b) RMAV, (c) BMAV, and (d) general.
The way in which we have categorized the articles by research area is important to interpreting this data. The articles were categorized by a three-person, independent manual review of each article (as previously described). In most cases, the subject could easily be determined because it was clearly stated in the abstract. However, many articles required a more extensive reading of the entire article. Since this is a subjective process, every attempt to eliminate bias in this categorization process was made. All three of the co-authors independently reviewed and recorded their categorization of each article in a spreadsheet. These were then collated together and compared. Most of these three article categorizations matched. The discrepancies were reviewed again by the three authors together. A final decision was unanimously made based on intense scrutiny of the textual content.
This process can only be described better by summarizing the articles that were categorized. Although it is impractical to address all 848 articles in this work, a select sample is described in the following sections to illustrate the various types of MAV research that has been published.
Fixed-wing micro air vehicles
FMAV are micro-scaled airplanes with fixed non-moving wings that passively generate lift but not thrust. Thrust is achieved via a separate propulsion system (normally propeller-based). They are generally used for missions in non-confined spaces, due to their requirement to maintain a continuous forward velocity in order for their wings to generate lift. Academic research in the USA was initially driven by student competitions (that began in 1997) at the University of Florida and Arizona State University. 8 One of the earliest journal articles on this topic presented a multidisciplinary design optimization (MDO) methodology for designing FMAV that could operate at low Reynolds numbers. 9 The first sophisticated FMAV designed, built, and flown was the Black Widow by AeroVironment Inc. in the USA. 10 Funding for this was supplied by DARPA in 1998 under the Small Business Innovation Research (SBIR) program. A MDO methodology with a genetic algorithm was used to integrate the subsystems and optimize it for a maximum endurance of 30 min, flying at 30 mph (48.28 kph). This aircraft had a wing span of 6 inches (15.24 cm) and a mass of less than 100 g. It was equipped with a color video camera that downlinked live video images to the pilot over a range of 2 km. Many universities have researched and developed FMAV since this initial work. Cosyn and Vierendeels 11 explained the methodology and computational strategies used to design a series of FMAV at Ghent University. Wood et al. 2 presented a palm-sized FMAV designed at Harvard University.
Figure 7(a) shows that most of the journal articles written on FMAV (46.3%) focused on aerodynamics. Much of the pioneering work on low Reynolds number airflows (inherent to MAV) was led by Prof. Dr Thomas Mueller (University Notre Dame). This work includes several journal articles, such as Pelletier and Mueller 12 and Torres and Mueller, 13 Mueller, 14 and also a compilation book. 15 Traub 16 conducted wind-tunnel experiments on biplane, delta wing-configured FMAV. Lian et al. 17 modeled a wing that used a flexible, latex membrane to calculate the interaction between the air flow and structure using a pressure-based, three-dimensional, incompressible Navier–Stokes equation solver. This work was then expanded in a following article. 18 . Viieru et al. 19 studied the effect of a wing-tip vortex on a flat plate, simulating a low aspect ratio wing and low Reynolds number flow that is typical of FMAV. Cosyn and Vierendeels 20 studied the unsteady, three-dimensional flow of rectangular wings using a computational fluid dynamics (CFD) code and a strip method. This was compared to experimental results. Lin et al. 21 built and conducted flight tests of a 15 cm and 20 cm FMAV, measuring the coefficient of lift-to-drag ratio (CL/CD) for different angles of attack (α). Gamble et al. 22 conducted an experimental investigation of the propeller slipstream on a flexible wing FMAV that had a 24 inch wing span. Watkins et al. 23 wrote an article that gave an overview of experiments on the dynamic sensitivity of MAV to turbulence. Sadeghi et al. 24 investigated the characteristics of the unsteady flow field in the downstream wake of a pitch-oscillating Eppler‐361 airfoil. Arbós-Torrent et al. 25 experimentally examined the effect of wing leading and trailing edge supports on the aeromechanic performance of a membrane airfoil. Oduyela and Slegers 26 analytically examined the wind gust alleviation properties of an FMAV with passive articulating wings. Bleischwitz et al. 27 experimentally analyzed the effect of wing aspect ratio on the aeromechanics of membrane wings.
Several articles (34.6%) focus on the GNC of FMAV. Gad-el-Hak 28 examined two methods of improving the response of control surfaces: chaotic mixing to energize the laminar boundary layer in order to delay flow separation and using genetic algorithms to optimize the shape of the airfoils. In an effort to avoid the difficulties of installing hinged ailerons on micro-scaled wings, Abdulrahim et al. 29 tested the flight characteristics of a FMAV designed with control surfaces created by morphing the wings using a set of torque rods to twist and shape it. This same design group later investigated using membrane actuation for roll control. 30 Guglieri et al. 31 discussed an optimization process based on a genetic algorithm (GA) to meet the frequency domain handling qualities requirements in the longitudinal plane for a FMAV flight control system that is characterized by nonlinear aerodynamics. Ashokkumar 32 examined controllers capable of generating autonomous FMAV trajectory options. Shen et al. 33 developed a new three-axis attitude motion model using pressure and shear information. This was bioinspired by birds and bats which obtain this information from mechanoreceptors on their wing and bodies.
Several articles (7.1%) also focus on the ultra-lightweight structures and wing skins required for FMAV. O’Keefe et al. 34 examined micro-foamed structures. Lian et al. 17 introduced using a lightweight membrane wing skin structure for an inexpensive, expendable MAV. Pawlowski et al. 35 fabricated MAV wing skins by electospinning electroactive polymers. Later articles examined the aeroelastic properties of FMAV wings. Stanford and Ifju 36 studied aeroelastic optimization of a MAV membrane through topology optimization. Chakravarty et al.37,38 conducted a modal analysis of thin wings (with a latex membrane) by comparing finite element analysis results with experiments done in a vacuum chamber.
The least prevalent category of articles focused on propulsion systems (4.2%). Most FMAV are powered with an electric motor which turns a propeller to generate thrust; however, a few use alternative propulsion systems. Cheung et al. 39 proposed a bipropellant, hybrid rocket turbine engine. Bronz et al. 40 examined a hybrid system combining solar energy with lithium batteries for long endurance. De Marqui et al. 41 examined the potential of harvesting electrical energy from aeroelastic vibrations of the lifting surfaces of FMAV.
Rotary-wing micro air vehicles
RMAV are micro-scale air vehicles that use rotors to achieve lift and thrust (similar to a helicopter). The hovering capability of RMAV makes them more adept than FMAV to operate in confined spaces. Their ability to fly in confined spaces is primarily limited by their size, which is generally larger than FMAV or BMAV. Most RMAV configurations are compelled to be more than 350 g due to their hardware limitations.42,43 RMAV generally fly much slower and have lower endurance than FMAV. Conventionally sized unmanned aircraft with multiple rotors (e.g. quadrotors, hexarotors, etc.) have become popular in recent years due to their stability, maneuverability, motor redundancy, and ease in remotely piloting. These are being used or envisioned for a wide range of military and commercial applications, such as: tactical surveillance, agricultural monitoring, industrial planning, film production, and even pizza delivery. Correspondingly, research into micro-sized (RMAV) versions of these aircraft has also increased. Bohorquez et al. 44 from the University of Maryland designed, built, and flight-tested a coaxial RMAV that weighed approximately 100 g. Researchers at this same university also developed a shrouded single-rotor RMAV that improved the hover efficiency and payload capability, compared to existing designs at that time. 45 They also developed a hybrid biplane quadrotor design which combined capabilities of hovering and forward flight. 46 Kim et al. 47 from Konkuk University designed a RMAV (less than 120 g) with single-rotor (powered by an electric motor) that is able to achieve stable, hovering flight with a gyroscope-based anti-torque control system. Ng et al. 48 from the National University of Singapore presented a design-optimization methodology (based on a genetic algorithm) to organize components and payloads to give the most compact size while still meeting specific physical and control constraints.
Figure 7(b) shows that most of the articles on RMAV are associated with GNC (63.7%). RMAV offer a stable, flight platform that is ideal for developing and testing research in this area. It is expected that variations of the technologies and algorithms employed using RMAV, will eventually be used in FMAV or BMAV as well. Ettinger et al. 49 developed a feedback controller for vision-based autonomous flights. Bouabdallah et al. 50 proposed using quadrotor RMAV for fully autonomous indoor inspections. Wendel et al. 51 developed an integrated navigation system based on MEMS inertial sensors and GPS for vertical take-off and landing (VTOL). Beyeler et al. 52 presented an optic flow control strategy for autonomous flight in the vicinity of obstacles. He et al. 53 present the Massachusetts Institute of Technology (MIT) RMAV system designed for the MAV ‘08 competition, which had the goal of locating and rescuing hostages being held in a remote building. The article describes the navigation and sensing payload and also the vision and state estimation algorithms used to track ground features (including stationary obstacles and moving adversaries). Bürkle et al. 54 presented communication and navigation methodologies for “swarming” multiple quadrotor RMAV in order to search over broad areas. Pestana et al. 55 experimentally studied a configurable controller architecture that allows indoor or outdoor GPS-denied navigation.
There were much fewer articles on the aerodynamics of RMAV (12.1%), than for FMAV or BMAV. Most of these articles focused on hovering inefficiencies for the low Reynolds numbers typical of MAV. Ramasamy et al. 56 experimentally measured the aerodynamic performance of rotary blades shown to have low hovering efficiency. They found that the wake sheets trailing from the blades were much thicker and turbulent than larger rotary aircraft (with higher Reynolds number). Similarly Hein et al. 57 also examined the hovering performance of a two‐bladed RMAV. They found that rotor blades with cambered airfoils or spanwise, twisted flat plates had much better efficiency than blades consisting of a non-twisted flat plate. Koel et al. 58 presented a nonlinear mathematical, aerodynamic model of a gun-launched micro air vehicle (GLMAV) rotorcraft. The RMAV uses a two-bladed coaxial contra-rotating blade and a cyclic swashplate. It is packaged in a projectile which is launched by a portable gun. The model was validated by comparison with real load data.
A few RMAV articles (14.3%) were categorized as related to the propulsion system (or rotary mechanism). Although the previous paragraph described several articles that examined the hovering efficiency of rotor blades, these examples primarily focused on the aerodynamic effects of the blades and not the propulsive system itself. The primary flight mechanisms used are: co-axial rotors (with a stabilizer bar), counter-rotating rotors, or multi-rotors (e.g. quadrotors). Thipyopas et al. 59 described one potential solution to the problem of miniaturizing the complex propulsive mechanisms of RMAV by using actuators made of smart materials. Sicard and Sirohi 60 described the development and testing of a rotor with ultra-lightweight, flexible blades that are capable of being rolled up and stored inside the rotor hub. Benedict et al. 61 measured the effect of rotor geometry and blade pitching kinematics on the performance and power loading of a RMAV cycloidal rotor.
Biomimetic micro air vehicles
BMAV are micro- and nano-scaled air vehicles that are biologically inspired from flying insects, birds, and bats to achieve lift and thrust by flapping their wings. Like their biological counterparts, BMAV are highly maneuverable and lightweight. They are capable of maneuvering in confined areas or even indoors. The vorticities created by flapping the wings (for low Reynolds numbers) allow them to generate aerodynamic forces (i.e. lift and thrust) with higher magnitudes than fixed wings. This means that a flapping wing is able to produce as much lift as a larger (surface area) fixed wing. Therefore, BMAV offer the potential of being the smallest type of MAV (or NAV). There are still many technical challenges involved with designing BMAV, such as: modeling the unsteady aerodynamics, compact flapping mechanisms, ultra-lightweight materials and structures, and most significantly an ultra-lightweight power supply. Because of these challenges, there are currently no operational BMAV, only research-based prototypes. However, there is much more research currently being done on BMAV than the other two types, so this is expected to change in the coming years.
Much of the pioneering work on BMAV was done by Prof. Dr Robert Michelson from the Georgia Tech Research Institute (GTRI), who led research leading to the development of the insect-like “entomopter”. Michelson et al. 62 describe an innovative “reciprocating chemical muscle” that provides the electrical power necessary for flight with flapping wings. Michelson 63 describes novel approaches to miniature flight platforms. Wood 64 describes research done at Harvard University that led to the first flight of a 60 mg BMAV that was bioinspired by a Dipteran insect (common house fly). This is the smallest BMAV that has ever achieved flight; however, it is incapable of free flight because it must be tethered to an external power supply. Researchers from the Delft University of Technology have published numerous articles (such as De Clercq et al. 65 and De Croon et al. 66 ) on the “Delfly” BMAV that they developed. The Delfly weighs only 3 g, has a wing span of 10 cm, and is capable of carrying a camera payload. A New York Times article 67 announced that AeroVironment (under DARPA funding) had unveiled a hummingbird-like BMAV prototype in 2011, that is capable of flying at 11 miles per hour and perching on a windowsill. Some of the technical details of its development are written in a conference paper by Keennon et al. 68
Figure 7(c) shows that the majority of BMAV articles (41.3%) have focused on the unsteady aerodynamics of flapping flight. An early article by DeLaurier 69 described a design-oriented model for the unsteady aerodynamics of a flapping wing using a modified strip theory approach. Ho et al. 70 presented a comprehensive review article on many aerodynamic aspects of BMAV design. These topics included: scaling laws, the unsteady flow regime (of biological flyers and BMAV), aeroelastic coupling, and flow control strategies. They also reviewed microelectromechanical (MEM) actuators and active flow control. Sengupta et al. 71 presented a new, numerical method for calculating the unsteady aerodynamics of a hovering and flapping airfoil. Mueller et al. 72 created a new test stand (using a 250 g load cell) that is capable of isolating and measuring the low lift and drag forces and high-frequencies associated with BMAV. They developed a semi-empirical aerodynamic model of a BMAV and used it to validate their experimental results. Walker et al. 73 presented analytical and numerical methods of optimizing the thrust and efficiency of a harmonically, deforming thin airfoil. Deng et al. 74 from the Delft University of Technology presented an experimental investigation of the aerodynamic characteristics of a 10 cm BMAV in hovering and forward flight.
A BMAV generates aerodynamic forces (thrust and lift) by flapping its wings. Therefore, the mechanism that drives this flapping can be considered as the propulsion system. Developing an ultra-lightweight and micro-sized mechanism and power supply to allow free flight is perhaps the most difficult, unsolved challenge in BMAV research. Because of this, there are many articles on this topic (29.5%). Cox et al. 75 used three piezoelectric-actuated flexure-based mechanisms to transform the linear output of piezoelectric unimorph actuators into single-degree-of-freedom flapping motion. Madangopal et al. 76 analyzed the energetics of a BMAV design with a four-bar flapping mechanism. Conn et al. 77 presented a parallel crank-rocker mechanism that allows unconstrained, integrated flapping and pitching motion. This allows an adjustable wing angle of attack, which can potentially improve a BMAV’s flight stability and maneuverability. Karpelson et al. 78 from Harvard University presented a review of the actuation and power electronics options for BMAV. Bolsman et al. 79 designed an actuation mechanism for a four-winged BMAV that exploited resonant properties to reduce energy expenditure and amplify the flapping amplitude. An elastic, ring-type body structure is coupled to the wings by a compliant amplification mechanism. This transforms and amplifies the ring deflection into wing root rotation. Guo et al. 80 manufactured and tested a piezoelectric actuated flapping wing rotor model and compared it to results of a numerical model that they also developed. Hamamoto et al. 81 fabricated a two-winged BMAV with four ultrasonic motors that used a two-degree-of-freedom (2-DOF) transmission system to directly drive each of the wings. Hou et al. 82 proposed a new mechanism to generate the torque of flapping dragonfly wings that is inspired by blood circulation in insect wings. The circulation in veins induces Coriolis forces in the wings, acting in opposite directions when the blood flows in and out, generating torsional moments (especially in the leading edge). The leading edge twists during flapping upstrokes and downstrokes, which causes the wing to camber. This improves the aerodynamic efficiency and compensates for bending deformations caused by air pressure in flapping flight.
Articles focusing on GNC account for 12.0% of the total number of BMAV articles published. As previously mentioned, the GNC research being done using RMAV could potentially cross over to BMAV and result in increasing numbers of articles in the future. Loh et al. 83 modeled the flight dynamics and control of a BMAV using MATLAB and SIMULINK software, using aerodynamic forces obtained from experiments. They used this model to study control of flap frequency, flap and pitch phasing (wing beat kinematics), and shifting the center of gravity. Ruffier et al. 84 developed two novel automatic flight control systems that were bioinspired from an insect’s visuomotor control system. Both are ultra-lightweight systems based on optical velocity sensors. The first allows terrain following and the second allows tracking of a high contrast target. Campolo et al. 85 studied an attitude stabilization system that fuses data from different and redundant bioinspired sensors, such as halteres, ocelli, gravitometers, magnetic compass, and light polarization compass. Karásek et al. 86 presented a control mechanism that independently modulates the wing flapping amplitude by displacing joints of a flapping linkage mechanism.
The structures and materials of BMAV are often bioinspired from flying organisms, such as insects or birds. Structures and materials research publications accounted for 11.7% of the BMAV articles examined. Song et al. 87 made a detailed investigation of the structural and mechanical properties of the forewing of the cicada to serve as a guideline for BMAV materials. Shang et al. 88 discussed a fabrication process to create planar wings with biomimetic venation patterns that have similar mechanical properties to insect wings under static loads. Jongerius and Lentink 89 conducted a detailed structural analysis of dragonfly wings using a micro-CT scanner. This included the thickness variations of the wing membrane and the venation pattern. They then modeled the forewing to determine its natural vibration modes and deformation. Dirks and Taylor 90 showed that the cross veins in locust wings increase the wing’s toughness by 50% by acting as barriers to crack propagation. They proposed that BMAV wing designs can be made more durable by incorporating similar, lightweight, artificial venation. Sivasankaran and Ward 3 at the University of Malaya described a procedure based on spatial networking analysis that can be used to create simplified dragonfly-like wing with a venation pattern that is within fabrication tolerances. The results of finite element modeling showed that the natural frequency and corresponding mode shapes, modal assurance criterion (MAC), and static bend-twist coupling results are very similar to a real dragonfly wing. The suitability of fabricating these artificial, dragonfly-like, wing frames from different materials was shown in Sivasankaran et al.. 91 Also, this same research team92,93 developed chitosan nanocomposite films to biomimic a dragonfly wing membrane and applied them to simplified wing frame structures that were created using a 3D printer.
Distribution of MAV articles by journal
Figure 8 shows the most popular journals for publishing MAV research from 1998 to 2015. Figure 8(a) shows the ranking for MAV as a whole, while Figure 8(b) breaks out the journals by the specific MAV types (FMAV, RMAV, and BMAV).
Distribution of MAV research published in specific journals. (a) All MAV articles. (b) By MAV type. (Only the most popular journals, accounting for 63% of the 848 articles are shown.)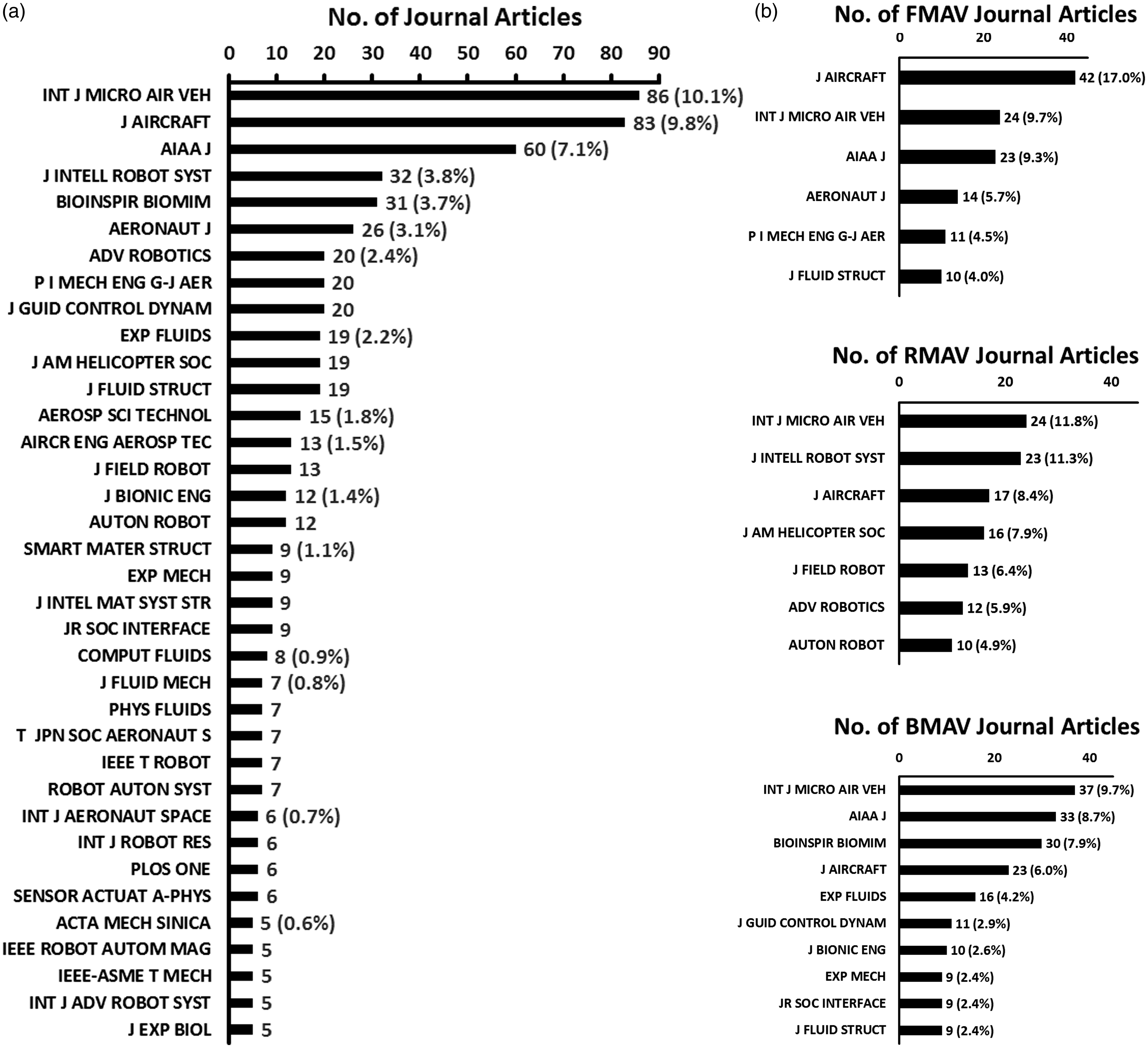
As could be expected, the International Journal of Micro Air Vehicles (IJMAV, Sage Publishing) is the most popular journal for publishing articles on MAV. This is because it is the only journal that specializes in MAV. The journal began in March 2009. Our search produced 86 IJMAV articles that meet our MAV criteria. Figure 8(b) shows that although IJMAV is the most popular journal for RMAV and BMAV, it is still second to the Journal of Aircraft for FMAV. As was shown in Figure 4(b), FMAV were more popular in the early years of MAV research, before IJMAV existed.
Two American Institute of Aeronautics and Astronautics (AIAA) journals (Journal of Aircraft and AIAA Journal) predominate as the second and third most popular journals for MAV. If we were to combine these two AIAA journals, they would easily dominate over IJMAV. This is partly due to their longevity. The Journal of Aircraft and AIAA Journal have been produced since 1964 and 1963, respectively. Thus, they predate the existence of MAV and are long established, trustworthy publications dealing with the advancement of aerospace engineering. Figure 8(b) shows that these two journals both rank high for FMAV articles. Other notable journals for FMAV are: the Aeronautical Journal (Royal Aeronautical Society), Proceedings of the Institution of Mechanical Engineers Part G Journal of Aerospace Engineering, and the Journal of Fluids and Structures (Elsevier).
Figure 8(b) shows that the Journal of Intelligent & Robotic Systems (Springer), which began in 1988, is the second most popular journal for RMAV systems. Although this journal is not dedicated to aerospace systems, it does have a special section in each issue devoted to unmanned systems, focusing on aerial, ground, sea-surface and underwater vehicles. Several other robotic journals rank high for RMAV publications: Journal of Field Robotics (Wiley Blackwell), Advanced Robotics (Taylor & Francis), and Autonomous Robots (Springer). The Journal of the American Helicopter Society also has published much on RMAV.
Besides the overall top three journals, the most popular BMAV journals include biology-inspired journals such as: Bioinspiration & Biomimetics (IOP Science) and Journal of Bionic Engineering (Elsevier). Two Springer experimental-themed journals: Experiments in Fluids and Experimental Mechanics, rank high. Another AIAA publication titled the Journal of Guidance, Control, and Dynamics is popular. Other notable journals are the Journal of Fluids and Structures (Elsevier) and the Journal of the Royal Society Interface.
Geographical distribution of MAV research
The geographical distribution of MAV journal articles is shown in Figure 9. In general, this corresponds to the nation of the authors listed in each article. However, many articles have authors listed from different nations. Some also involve multiple authoring organizations. Therefore, there are 1007 nation entries for the 848 articles examined. By continent, the authoring organizations are primarily located in North America (43%), Asia (28%) and Europe (26%). There are a few (3%) in Australia, but less than 1% in both South America and Africa.
Geographical distribution of MAV research. (Only nations with four or more articles are shown.)
By far, most MAV research is being produced by authors in the USA (40%). Authors in Asia are mostly in the People’s Republic of China (PRC) (8.2%), South Korea (5%), Japan (3.3%), and India (3%). The majority of European authors are in England (7%), France (5.5%), Germany (3.4%), and the Netherlands (2.4%). One surprise from these results is the lack of substantive MAV research (listed in the WoS database) authored by Russians, who are often leaders in aerospace advancement.
Distribution by authoring organization
The 848 MAV articles were published by 184 different authoring organizations. Figure 10 shows the authoring organizations that are most prolific in publishing MAV journal articles (top 46%). As previously mentioned, some articles are authored by multiple organizations. Since Figure 8 has already shown that the majority of the work occurred in the USA, it is no surprise that US organizations occupy the top three spots. The University of Maryland and US Air Force (USAF) are the most prolific, each having authored 51 articles (6% each of all MAV articles published). They are closely followed by the University of Florida with 50 articles (5.9% of the 848 articles). The summation of articles for the USAF is somewhat different than the universities, because US government organizations are generally larger and include a broader spectrum of researchers than a university. Articles from many different sub-organizations within the USAF (e.g. Air Force Institute of Technology, Air Force Research Laboratories, etc.) are included in this summation. This is true of the US Army and the National Aeronautics and Space Administration (NASA) as well. Other notable US authoring organizations include: the Virginia Polytechnic Institute and State University (popularly known as Virginia Tech), University of Michigan, Georgia Institute of Technology, University of Delaware, Harvard University, and the University of Illinois.
Distribution of authoring organizations of MAV journal articles. (Only the top 46% of the total number of 848 articles are shown.)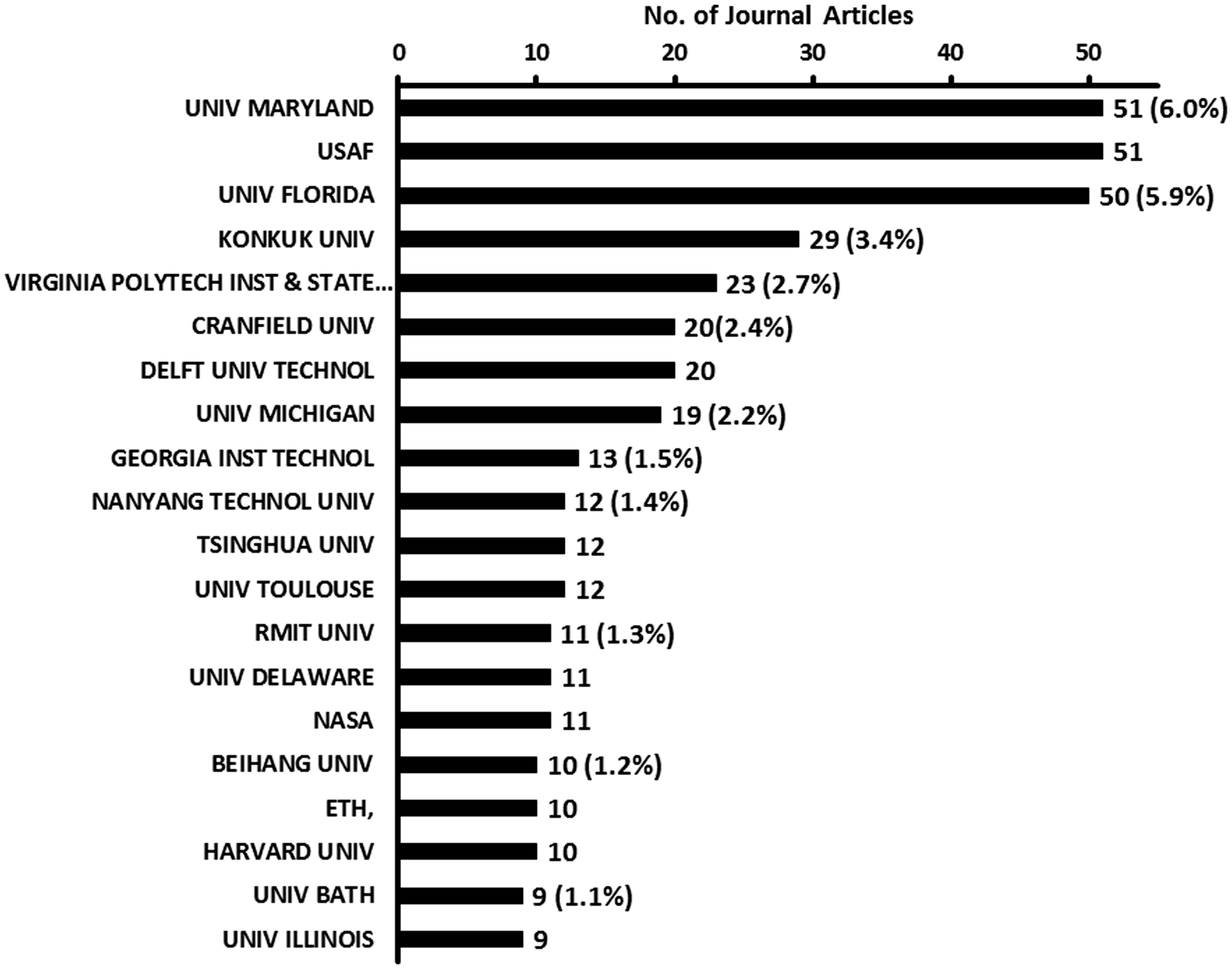
The most prolific authoring organization outside of the USA is Konkuk University (Seoul) in South Korea, authoring 29 articles (3.4% of the publications). Recall Figure 8 which showed that China produced more articles overall than South Korea. This indicates that the majority of research in South Korea is centered at Konkuk University, while in China it is more spread out between organizations, such as: Tsinghua and Beihang Universities (both in Beijing). Another notable Asian university is the Nanyang Technological University in Singapore.
Cranfield University in the UK is the top European authoring organization with 20 articles (2.4% of the publications). Other notable European universities are the University of Toulouse in France, the Swiss Federal Institute of Technology (ETH), and the University of Bath in England. The Royal Melbourne Institute of Technology (RMIT) University (in Australia) is also a notable authoring organization with 11 articles (1.3%).
Figure 11(a) to (c) shows the distribution of authoring organizations by MAV type. The color pie charts located next to each authoring organization show the specific research areas that their articles cover. (Note: the legend for all of these pie charts is shown in Figure 11(d).) The University of Maryland has primarily written articles on RMAV and BMAV (with only 1 FMAV article that is not shown in the figure). They are the leading authoring organization of RMAV with 32 of the total number of 203 RMAV articles (15.8%). This contrasts sharply with the USAF, which has no articles at all on RMAV. This is because the US Department of Defense is organized so that the US Army is primarily responsible for rotorcraft vehicles (e.g. helicopters), not the USAF. The USAF leads in authoring BMAV articles with 30 of the total number of 381 BMAV articles (7.9%) and is second for FMAV articles with 20 of the total number of 247 FMAV articles (8.1%). As previously mentioned, the University of Florida was a pioneer in starting FMAV research in 1997 and they are still the lead authoring organization for FMAV today with 32 articles (13%). They also published 15 BMAV articles, but only 2 RMAV articles (not shown in the figure). All three of these organizations produced one general MAV article (of the 7 total).
Distribution of authoring organizations by specific MAV type. (a) FMAV (percentage out of 247 total FMAV articles) (only authoring organizations with 3 or more articles shown). (b) RMAV (percentage out of 203 total RMAV articles) (only authoring organizations with three or more articles shown). (c) BMAV (percentage out of 381 total BMAV articles) (only authoring organizations with three or more articles shown). (d) General articles (percentage out of 17 total general articles) (only the authoring organizations among those in Figure 10(a) to (c) shown).
Figure 11(a) to (c) shows that all of top authoring organizations have published articles on at least two or more of the MAV types (except the University of Delaware). But the figure also shows a tendency for authoring organizations to become more specialized in a particular MAV type. For example, several of the top RMAV authoring organizations have published very few (or no) BMAV articles. This can be observed by examining: the University of Toulouse which has eight RMAV articles but no other types; Beihang University (China) which has seven RMAV but only three BMAV; and ETH which has eight RMAV but only two BMAV. There are many more examples of the reverse: Konkuk University has 22 BMAV but only 3 RMAV; Virginia Tech has 17 BMAV but only 2 RMAV; Cranfield University has 18 BMAV but only 2 RMAV; Delft University has 15 BMAV but only 2 RMAV; the University of Michigan has 15 BMAV but no RMAV; the University of Delaware has 11 BMAV but no RMAV; and Harvard University has 9 BMAV but no RMAV.
Figure 11(a) to (d) also shows that many organizations are publishing articles covering more than four of the five research areas. This implies that they have adopted an overall systems approach to their research. An example of this is the University of Florida’s FMAV research covering: aerodynamics (12 articles); guidance, navigation, and control (11 articles); structures and materials (7 articles); and system design (2 articles). RMAV guidance, navigation, and control (GNC) articles appear to be the most popular subjects for narrowly focused research (e.g. ETH, Tsinghua University, and NASA). As already mentioned, this is because of the convenience of RMAV as a flying platform for testing GNC hardware and software. Aerodynamic research, involving both FMAV and BMAV, is also a popular subject on which to concentrate focus (e.g. University of Michigan and Delft University).
MAV funding sponsors
Figure 12 shows the top 82% of external research funding sponsors. Only 449 external funding sources were acknowledged in the 848 articles. Although one can presume that articles without an acknowledgement were self-funded by the authoring organization, there is no way to verify this. Only the acknowledged external funding sources are examined in this section. Another limitation in analyzing sponsorship is the lack of data on the actual monetary amounts that were awarded. It stands to reason that a higher research budget will allow more publications. The data extracted from the WoS can only tell us how many published articles were generated from specific funding sponsors. It is impossible to make an assessment on how efficiently that money was spent and no attempt is made to do so in this article.
Distribution of MAV research by funding sources. (Only the top 82% of the funding acknowledgements shown. Percentage out of 449 total sponsors.)
Figure 12 shows that the USAF has historically sponsored the most articles (133 articles which is 29.6% of the 449 acknowledged sponsors). This helps to explain why the USAF is one of the top authoring organizations. The National Science Foundation in the USA is second by sponsoring 61 articles (13.7%). The US Army is third with 38 articles (8.5%) and the US Navy is 10th with nine articles (2.0%). Overall, these four US funding sources account for 241 articles (28.4% of the 848 total number of MAV articles), which are most (53.7%) of the 449 acknowledgments. These overwhelming numbers give a clear indication of why the US currently leads MAV research in the world.
The Chinese National Science Foundation (NSF) is fourth in its sponsorship of articles (and first outside the US) with 33 articles (7.3% of the 449 acknowledgments). Other Chinese sources include the Fundamental Research Funds for Central Universities (FRFCU) with seven articles (1.6%) and the China Scholarship Council (CSC) with six articles (not shown in the figure). Overall, these three Chinese sources sponsored a total of 46 articles (5.4% of the 848 total number of MAV articles) and had 10.2% of the 449 acknowledgments. In South Korea, the National Research Foundation (NRF) sponsored 14 articles and the Ministry of Education, Science and Technology (MOEST) sponsored 11 articles. Combined this totaled 25 articles (2.9% of the 848 total number of MAV articles). Elsewhere in Asia, the Japanese Society for the Promotion of Science (JSPS) sponsored seven articles.
The fourth most acknowledged funding sources are the Engineering and Physical Sciences Research Council (EPSRC) in the UK and the French National Research Council (Agence Nationale de la Recherche, ANR), which both have 21 acknowledgements (4.1% each). Elsewhere in Europe, the European Commission sponsored 15 articles (3.3%).
Figure 12 also shows the breakdown of sponsorship by MAV type. As has already been discussed, the majority of 133 articles sponsored by the USAF is for BMAV (73 articles) and FMAV (55 articles) in comparison to RMAV (2 articles). In contrast to this, the US Army sponsors primarily RMAV research (22 articles) in comparison to FMAV (14 articles) and BMAV (2 articles). The US-based NSF has sponsored twice as many BMAV articles (39 articles) than FMAV and RMAV articles combined (20 articles).
In Asia, the Chinese-based NSF has nearly the opposite result as the US NSF, with sponsorship of more RMAV articles (18 articles) than BMAV (11 articles) or FMAV (3 articles). South Korean sponsorship by NRF and MOEST is completely dominated by BMAV articles (22 articles in combination) in comparison with just 2 RMAV articles. The Japanese Society for the Promotion of Science also has more BMAV (five articles) than RMAV (two articles).
The British-based EPSRC has sponsored twice as many BMAV (14 articles) than FMAV and RMAV combines (7 articles). However, the French ANR and European Commission appear to focus their sponsorship primarily on RMAV (with 16 and 13 articles, respectively).
Overall, there appears to be very little external sponsorship of FMAV research in comparison with RMAV or BMAV. RMAV research appears to dominate for sponsors located in the USA, China and mainland Europe. BMAV research dominates for sponsors located in the USA, the UK, South Korea, and Japan.
Conclusions
The bibliometric results show that MAV research is rapidly expanding and growing. Although it is currently dominated by the authoring organizations in the USA, there are established and growing research programs in nations such as: China, the UK, France, and South Korea. Other nations (such as our research team in Malaysia) have started active research programs which will make an impact in the future. Three types of MAV are discussed in this article: FMAV, RMAV, and BMAV. Although FMAV were the most popular type of MAV when this research began (circa 1998), both published articles and financial sponsorship are declining. The University of Florida (a US pioneer in this research when it began) remains the leader, having authored the most FMAV articles.
The number of BMAV articles surpassed FMAV in 2008 and is still at the top today. There also appears to be more sponsorship of BMAV research than any other type of MAV, especially in the USA, the UK, South Korea, and Japan. BMAV research has primarily focused on the unsteady aerodynamics associated with flapping wings and secondarily on the design of ultra-lightweight flapping wing mechanisms. More research needs to be done with structures and materials and system design. This research is now being done by many organizations around the world, but the USAF followed by Konkuk University (South Korea) has authored the most BMAV articles.
RMAV research has gradually expanded, catching up to BMAV with increasing numbers of published articles each year (slightly surpassing BMAV in 2014). This is largely due to the ease of using RMAV as a flight test platform for GNC research. Much of what is learned in this GNC research could also be used in future BMAV or FMAV. In comparison to GNC, there is little research on aerodynamics, propulsion, and system design. There is no research (at all) focusing on structures and materials. This is driven by the fact that RMAV use more familiar components and processes than BMAV and also have larger size and heavier weight limitations. There are several sponsors of RMAV research in the USA, China and mainland Europe. The University of Maryland leads in having authored the most RMAV articles.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by High Impact Research Grant UM.C/625/1/HIR/MOHE/ENG/53 (H-16001-D000053) and University of Malaya Research Grant RG155-12AET under the auspices of the Center for Transportation Research at the Faculty of Engineering at the University of Malaya.