
Abstract
In this work we present a parsimonious set of ordinary differential equations (ODEs) that describes with satisfactory precision the linear and non-linear dynamics of a typical laminar premixed flame in time and frequency domain. The proposed model is characterized by two ODEs of second-order that can be interpreted as two coupled mass-spring-damper oscillators with a symmetric, nonlinear damping term. This non-linear term is identified as function of the rate of displacement following
Keywords
Introduction
Combustion instability remains a problem of concern during operation of gas turbines, specially when operating conditions are associated with lean premixed combustion (Lieuwen and Yang 1 ; Poinsot 2 ). In order to mitigate this problem, it is of high interest to develop models and computational techniques that permit the prediction of this phenomenon at early stages of design. Hybrid approaches are the most common way to tackle combustion instability modelling. In these approaches the description of the flame response to flow fluctuations is accounted for separately from the generation of acoustic waves by the flame. The modelling of the flame response and acoustics are subsequently integrated in a single low-order model framework, usually a linearised wave equation or an acoustic network model, where the thermoacoustic stability of the system is evaluated. Furthermore, if the flame response model is non-linear in the amplitude of the incoming perturbations, such a framework is capable of predicting not only the stability but also features of the limit cycle associated with the coupling of the flame with the flow.
The Flame Describing Function (FDF) is an established non-linear flame response modelling technique (Dowling 3 ; Noiray et al. 4 ), which assumes that the flame responds at the same frequency of the input signal even if the latter exhibits large amplitudes. Therefore, an FDF is an appropriate model for weakly non-linear systems, where no interaction (flow of energy) between different frequencies is expected. The FDF can be understood as a collection of Flame Transfer Functions (FTFs) defined in the frequency domain by a gain and phase description of the system. In the FDF framework, each FTF is associated with a well defined amplitude of the input signal. Although of high relevance, the FDF is limited by the strong assumption of weakly non-linearity. Accordingly, it is only expected to satisfactorily describe flames, whose response occurs predominantly at the fundamental frequency of the input, i.e. where harmonics are negligible. In that respect, the studied limit cycles are very simple as they exhibit one single characteristic frequency. Lately Haeringer et al. 5 , introduced the concept of an extended FDF (xFDF), which includes additional transfer functions that relate higher harmonics of the output to the input. It becomes then possible to account for a response also in the harmonics and, thus, the prediction of limit cycles exhibiting more than one characteristic frequency if coupled with an acoustic model.
Once the xFDF model is available – usually obtained via harmonic forcing, where the gain and phase response of the system is calculated for each frequency and amplitude of interest – it can be used to study the dynamics of non-linear systems. Unfortunately, the xFDF models are limited as they are conceived fundamentally for harmonic signals as inputs. If coupled with a low-order model of the system acoustics and used in time domain, additional tedious calculations become necessary as the instantaneous amplitude and frequency of the incoming input signal is required. In order to overcome such a difficulty Ghirardo et al. 6 , introduced a technique, based on Hammerstein models and Fourier-Bessel series, to map the FDF from frequency to time domain via a state-space model. It was shown that such a model can reproduce well the information contained in the FDF within a narrow frequency band.
Recently, a different modelling strategy was introduced for the modelling of the non-linear flame response in the time domain (Tathawadekar et al. 7 ). The derived model is obtained relatively easy from data and is more general than the FDF as it accounts for interaction between frequencies. This data-driven model, which makes use of artificial neural networks (ANN) with a rather simple multi-layer perceptron architecture, is capable of predicting the output time series given a broadband input signal that exhibits a wide frequency bandwidth and a large amplitude distribution. If desired, the trained ANN model can retrieve the FDF if excited with monofrequent signals at well defined amplitudes. Unfortunately, a trained ANN model remains obscure – it is hard to make a physical interpretation of it – and can be used only as a black-box.
Another kind of non-linear flame response models exist (Campa and Juniper 8 ; Noiray and Schuermans 9 ; Noiray 10 ), that allow an interpretation of the physics involved during the evolution of limit cycles. These models describe the output of the flame response as a non-linear function of the input, usually polynomials or saturation functions, and often characterize the response as instantaneous: no time-lag is considered in the model.
Lately, some models have been proposed to account for a given characteristic time lag in the flame response (Bonciolini et al. 11 ; Gant et al. 12 ). Although this kind of models is powerful if combined with low-order models of the thermoacoustic system, usually in terms of linear oscillators, they remain descriptive but not predictive as they require tuning parameters that are obtained from the same data used in the analysis.
The present study proposes a different route for the non-linear flame response modelling in the time domain. It is in part inspired by the work of Dowling
3
, where perturbations of the normalized heat release rate
The proposed dynamic model is capable of reproducing with reasonable accuracy the output signal given an input broadband signal with a significant amplitude and frequency distribution. If excited with mono-frequent signals at well defined amplitudes, the model is capable of retrieving the qualitative behaviour of a typical FDF, which should exhibit a low-pass filter behaviour with gain saturation for large amplitudes, and a well defined low-frequency limit.
The study is organized as follows: Starting with a Model Description, we introduce the general model equations and our motivation for using them. In the Method section we illustrate the specific case analyzed, hereby resulting in simplifications of the general model structure as well as the data used. A brief discussion of the results is done in the Results and Analysis section followed by a Conclusion and Outlook.
Model description
Mathematical motivation
The dynamics of any time invariant system can be described by


Physical motivation
Figure 1 illustrates a typical heat release rate response of a premixed flame to an impulse of upstream velocity. As seen in this example, a characteristic flame impulse response exhibits - after some initial time delay - a strong positive peak usually followed by further peaks of alternating sign and decreasing amplitudes. Such a response reflects the oscillating behaviour of the flame surface area as the flame reacts to an impulse of velocity at its base. This oscillating behaviour is remarkably similar to the one of a simple mass-spring-damper system – a classical second-order ODE referred in this work as oscillator.
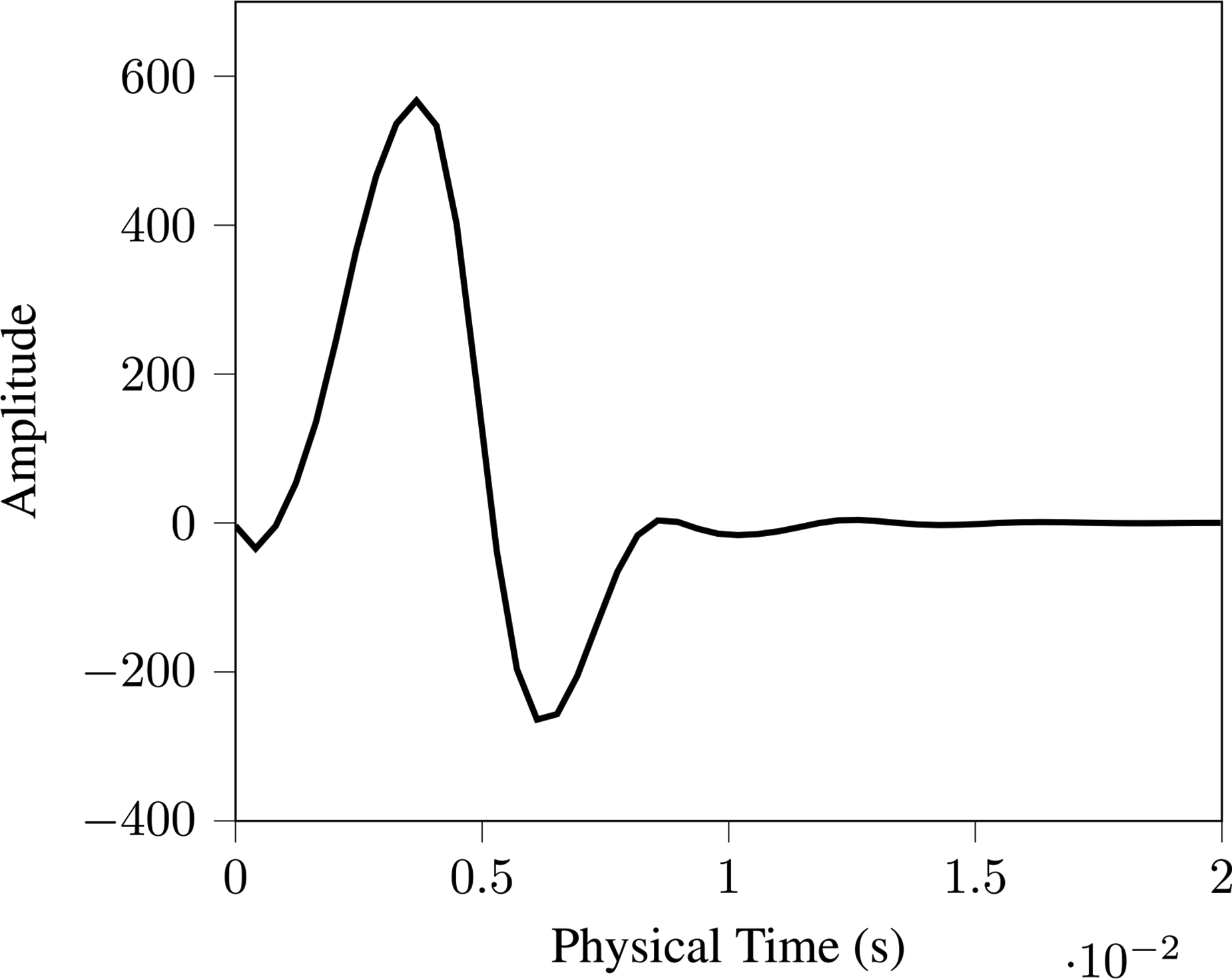
Flame impulse response of a laminar slit burner configuration (Silva et al. 13 ).
Compared to a single-mass oscillator, a real flame exhibits much richer dynamics. Individual flame regions may react differently to external excitation. The response of e.g. flame foot and flame tip may interfere constructively or destructively. Such a behaviour cannot be captured by a single second order ODE as we require more than two dimensions. In this work we show that two coupled oscillators can already capture very well the dynamics of a typical slit flame. Naturally, more complex flames, such as turbulent swirled flames, may require additional dimensions.
The physical significance of the proposed oscillator model, which is likely related to flame-flow feedback mechanisms, is not immediately obvious. While the mass(es) can be interpreted as flow inertia, the physical meaning of springs and dampers remains hidden. Note, however that an (isolated) flame, in the same way as an oscillator, has a stable equilibrium position, to which it eventually returns after a given perturbation. Thus, there exist a restoring force (spring) which is a function of displacement and a damping force (damper), which is a function of the rate of displacement.
In the present study, we do not aim at finding physical correspondence for the individual model components. Instead, we employ the proposed model as a demonstration that a very simplified version of Eq. (2), which represents very well the flame dynamics of a slit flame, can be inferred by simple analysis. The obtained two-coupled oscillators model could be exploited to investigate the flame response with an analogous mechanical model. The interpretation of the model components (nonlinear springs and dampers) remains a task of interest for future work.
General model equations
We start by proposing the horizontal, two-degrees of freedom mass-spring-damper oscillator model depicted in Figure 2. As we rely on a small number of dimensions, we use Newton’s notation for time derivative
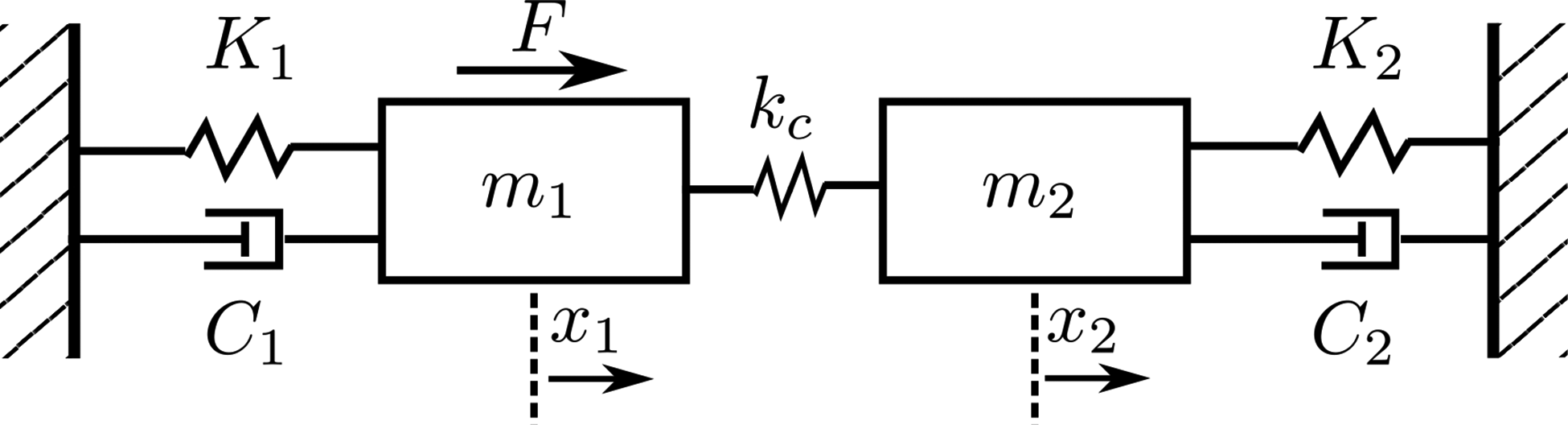
Coupled mass-spring-damper oscillator system representing the ODE system proposed in this work.
The input (i.e. normalized velocity fluctuations


Non-linear contributions
The functional form of the non-linear spring and damper characteristics governs the non-linear dynamics of the oscillator model and is thus decisive for the achievable match with the observed flame dynamics. Assuming that the spring and damping forces acting on the two masses are smooth functions of


According to our observations, the mixed cubic term
Interestingly, this analysis yields the same non-linear contribution as obtained in previous studies (Lieuwen 14 ;Noiray and Schuermans 15 ; Bonciolini et al. 11 ). However, in those studies the entire thermoacoustic system is represented as a (single-mass) non-linear oscillator, and the flame dynamics is only represented by a static, nonlinear term (with or without a delay).
Finally, the resulting non-linear model equations are


Low-frequency limit
Using global conservation laws for mass, energy, and momentum Polifke and Lawn
16
demonstrated that the transfer function between velocity fluctuations


Interestingly, the approach presented in Sec. Method would satisfy the constraint presented above even without explicit consideration of the static response. Although this points to the robustness of our approach, we implement the low-frequency limit explicitly, thus reducing the number of adjustable parameters by one. The ability to incorporate physical knowledge into our system - i.e. using grey box modelling - is an advantage compared to purely data driven black-box system identification.
Manipulating the phase response
The system of coupled oscillators under investigation (see Eqs. (7) and (8)) is a minimum phase system. This means that there exists no system with the same gain characteristics that produces a smaller shift in phase. We desire now to make the system of coupled oscillators of non-minimum phase. That allows the direct manipulation of the phase response of the system without alteration of the gain response. In other words, the design of a non-minimum phase system gives us an additional degree of freedom for a correct phenomenological representation of the flame response. For a system to be non-minimum phase it is required that the associated transfer function exhibits at least one zero in the right-half of the complex plane (Lunze 17 ).
Let us consider the characteristic equation of a linear, single oscillator


Here we denote the current integration step as
In order to counteract this difficulty, a Padè approximant of the exponential quantity is applied. The first order approximation reads
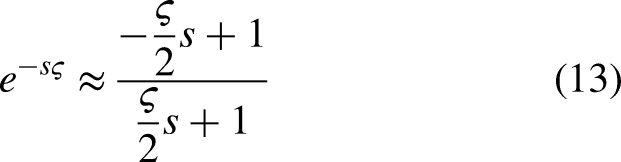
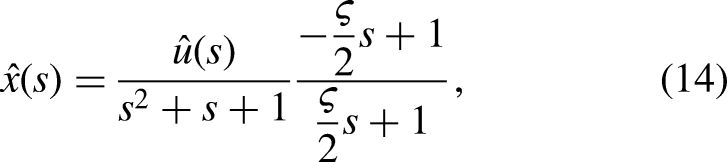

The first order Padè approximant is in good agreement with the reference case (red line) for low frequencies. Note that Eq. (14) is rational. Such a rational structure of the flame response function is ideal, when used together with acoustic network models, for studies on combustion instability because eigenvalue problems linear on the eigenvalue
In the present work, the phase response of the non-linear, coupled oscillators system, as per Eqs. (7) and (8), is manipulated by the aforementioned technique, where a time-delay is introduced in the system by a first-order Padè approximant.
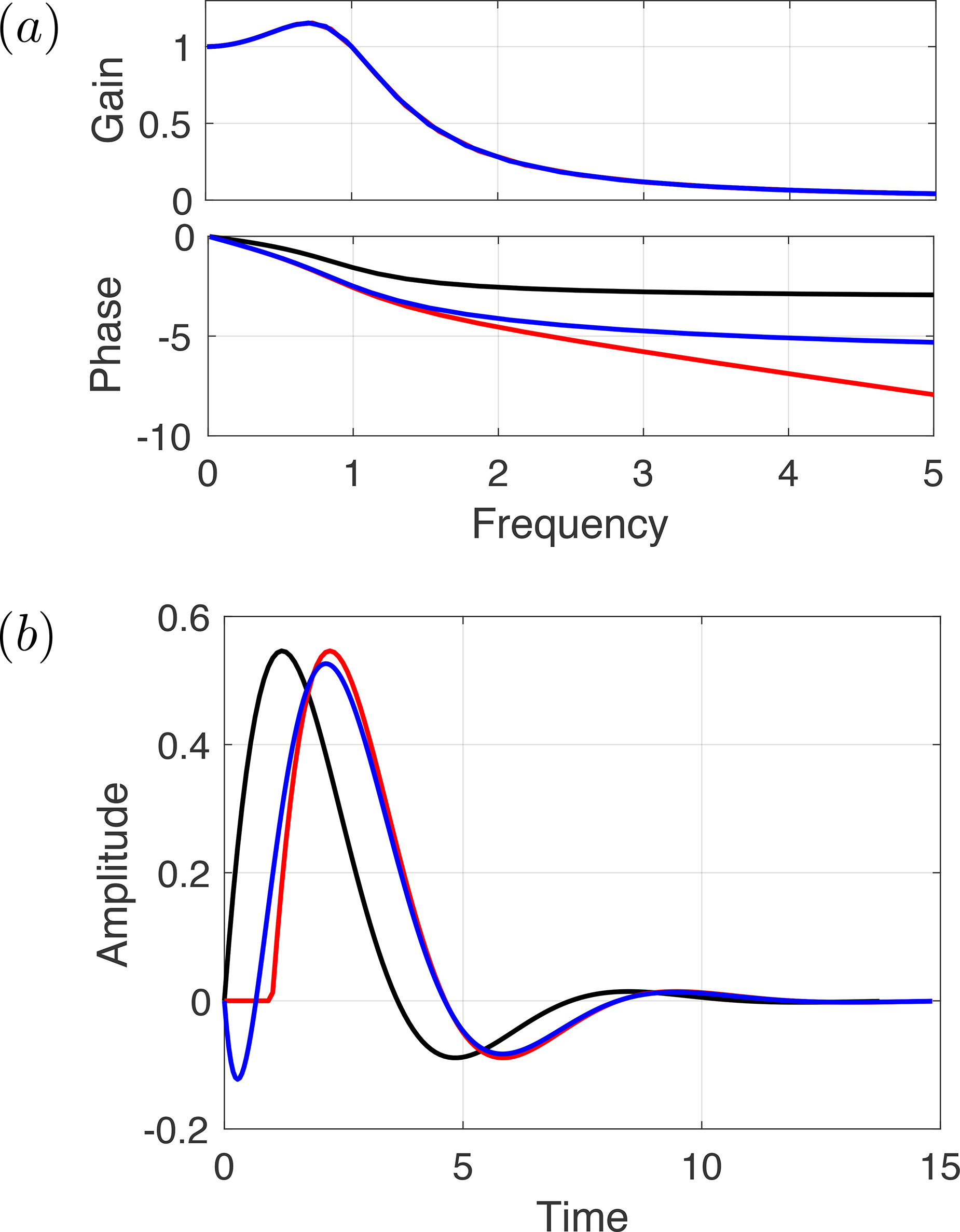
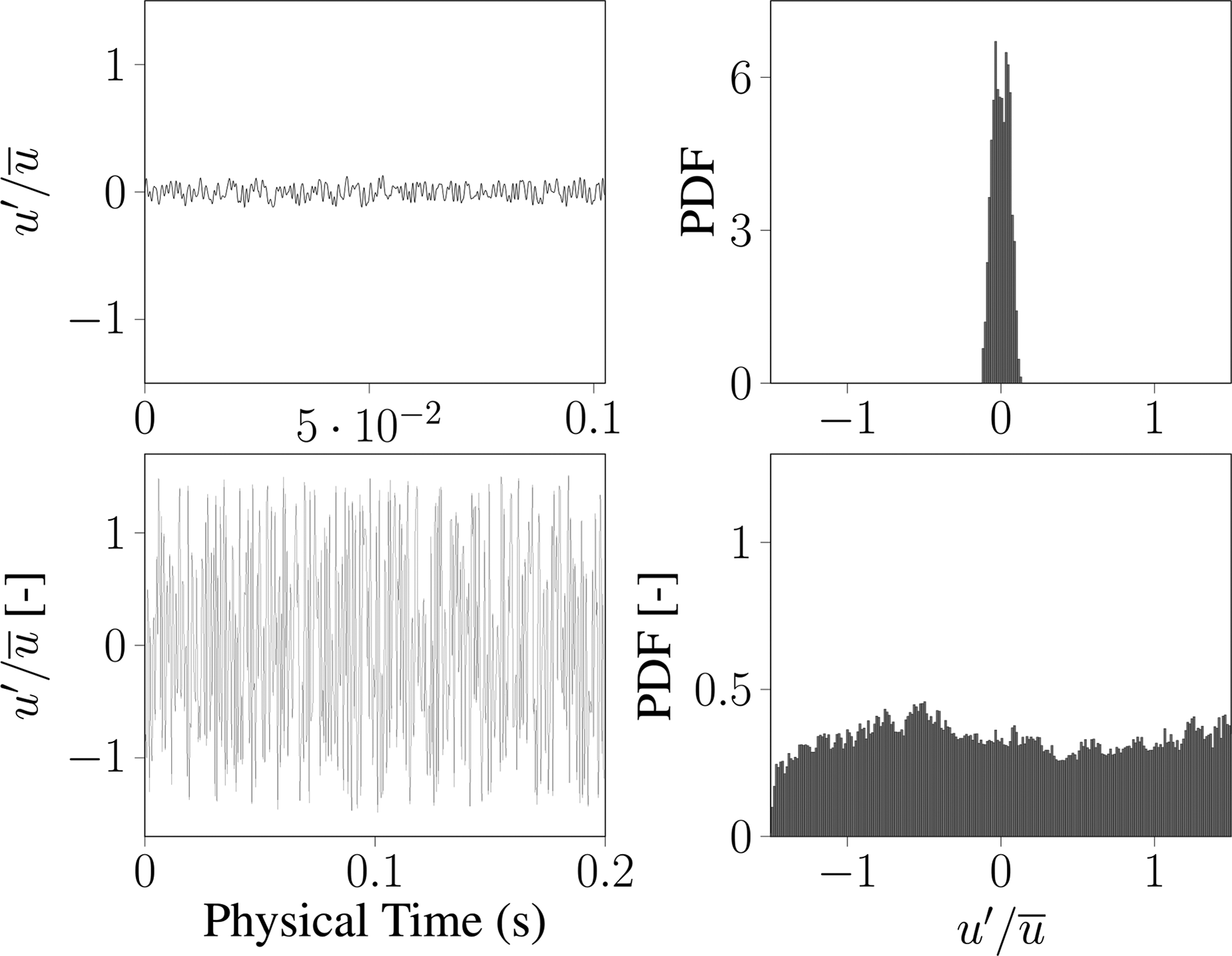
Note that application of the Padè approximant introduces an initial dip in the impulse response (see Figure 5). This local minimum introduces a new additional time scale to the model response. The resulting change in model behaviour is in good agreement with the actual flame response depicted in Figure 1, which qualitatively expresses the same initial dip in its impulse response.
Impulse response of LDO (blue, solid) and LSO (blue, dash dotted). Both are optimized on linear time series data and compared to a reference impulse response (black, dashed) resulting from established black box system identification tools. LSO and LDO impulse response are transformed to physical time
Method
Input and target data
During optimization, the model is presented to time series data consisting of broadband excitation data of the (normalized) fluctuations of the inlet velocity
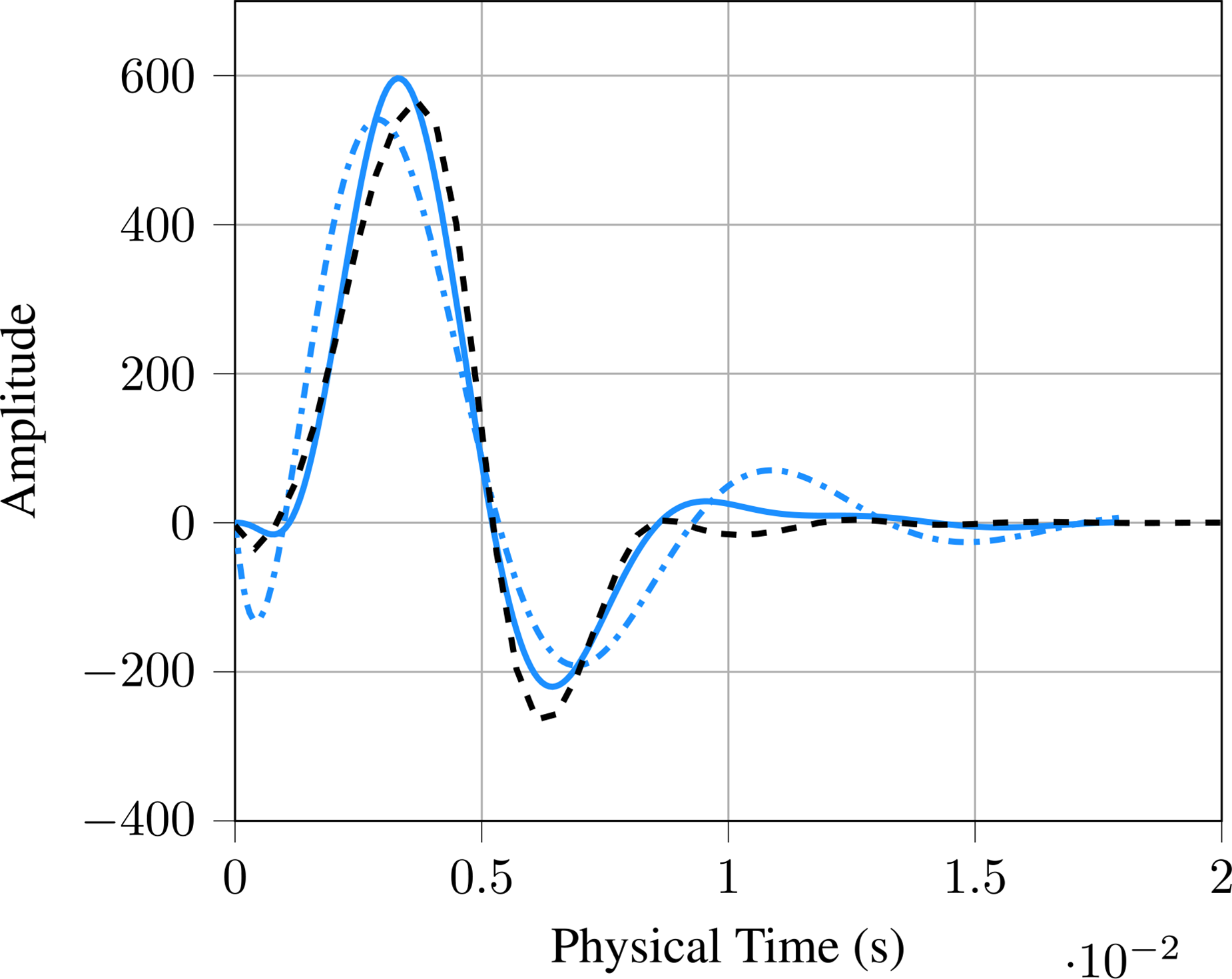
We investigate our model performance on two types of numerical data sets, a linear and a non-linear one. The general set-up is similar to the multi-slit Bunsen burner set-up which was investigated experimentally by Kornilov et al. 18 and numerically by Silva et al. 13 and Jaensch and Polifke 19 respectively. The first data set is generated using only small input amplitudes, and is used to evaluate the linear flame response. The second data set contains larger input forcing amplitudes, and is used to evaluate the non-linear flame response. The broadband signals and their amplitude probability density function are depicted in Figure 4. For a detailed description of the numerical set up used to obtain these data sets, we refer to the works of Silva et al. 13 and Jaensch and Polifke 19 .
Input signals used to train the models. Linear data set on top, non-linear data set at the bottom. Left: Input time series data, Right: Probability density function (PDF) of the input data.
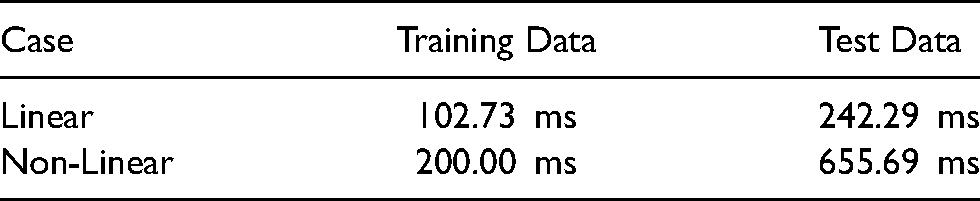
Using the same numerical set up as well as the given amplitude probability density distribution function of the input signals, a linear and a non-linear test data set are produced. Table 1 provides an overview over the signal length of each training and test signal used in this work.
Length of each signal in milliseconds (ms).
Time scaling of the equations
The model introduced so far assumes different physical parameters for each pendulum mass, resulting in ten parameters governing the model. As demonstrated in the Low-Frequency Limit subsection, we can reduce the number of parameters by using the constrains stated in Eq. (10). Refraining from a detailed discussion, we notice that models using a uniform parametrization (i.e. both masses share the same parameters
In general, the flame responds in a time window of milliseconds. Thus, an oscillator system that is able to model such (fast) flame dynamics, can be expected to feature very small masses and very high spring stiffness values. The extremely small mass values on their own can lead to serious optimization difficulties due to finite machine precision. Furthermore, large differences (several orders of magnitude) between 
We require now to find a suitable value for 
With an interpretation and value for 


Overview of used coefficients and the respective physical parameters they comprise.

Using the definition of 
Optimization
For optimization purposes, each data set (linear and non-linear one) is divided into a training and a test data set. The performance on the training set is used during the optimization procedure itself (e.g. to calculate a loss) while the performance on the test data is used to validate the model.
We interpret the linear oscillator model as special case of a general non-linear model, which is applicable for small input amplitudes only. Following this line of thought, our goal during optimization is to obtain a well performing linear model, which we then extend by a non-linear contribution responsible for modelling the saturation effect observed in the FDF (i.e. in the frequency domain). We thus propose a staged optimization approach. First, the non-linear contribution
By training linear parameters only on linear data, we avoid training the linear model contribution to dynamics only present in the non-linear data set, which would significantly worsen the model performance for small
By doing so, we ensure the best possible model performance over a wide range of input amplitudes and forcing frequencies.
As starting point for our staged optimization chain, we require an initial guess for our parameters. We start by putting all adjustable parameters to unity.
We use the Euclidean norm between the output of a given model and the target reference data as loss function 
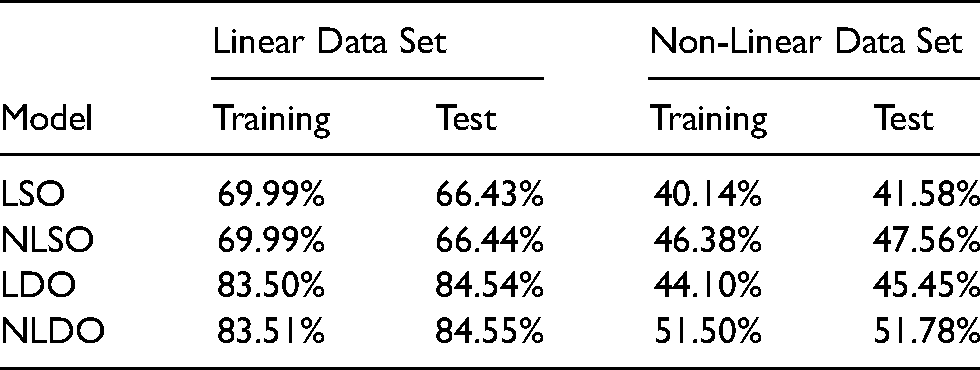
The obtained values are however difficult to interpret on their own, especially when applying the model to the test data set. We thus introduce a more intuitive %-fit loss value, which is used in Table 3 presenting the final results of optimization. Please note that this value is used in post processing only and not as loss function during optimization. The %-fit value is based on the normalized root mean square error and calculated as follows:
Performance values for different stages of optimization and number of oscillators on training and test set for linear and non-linear data sets.
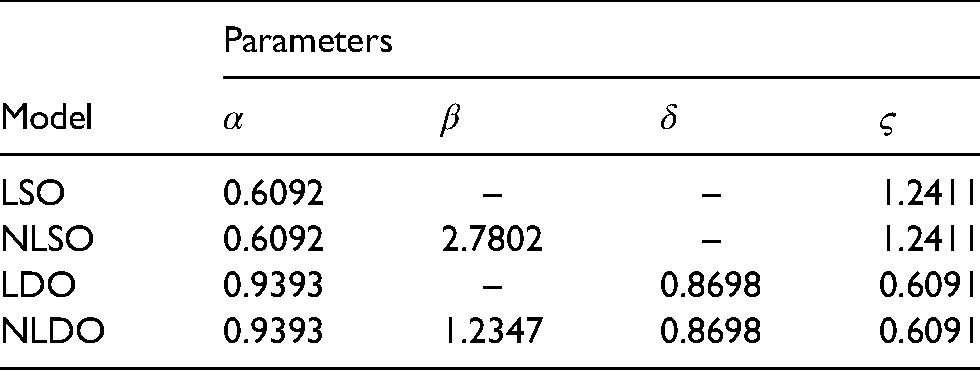
Parameters for models presented in Table 3. Note,
For the linear as well as the non-linear stage of optimization, we use a variant of the constrained limited-memory Broyden–Fletcher–Goldfarb–Shanno (L-BFGS) algorithm, the so called L-BFGS-B algorithm (see Byrd et al. 23 for a detailed description).
As with linear parameters
Note that we applied a time transformation when deriving model Eqs. (18) & (19). Thus, we need to transform the discrete time stepping of the input and output data according to Eq. (16).
Both stages of optimization combined take around 20 seconds of runtime on a single CPU at 3 GHz, thus runtime is not an issue.
Results and analysis
In the results presented, we differentiate between two model architectures and the two different stages of optimization. The classification is as follows:
Linear Single Oscillator (LSO) Non-Linear Single Oscillator (NLSO) Linear Double Oscillator (LDO) Non-Linear Double Oscillator (NLDO)
Here, the terms linear and non-linear refer to the stage of optimization as well as the dynamics inherent to the model. Linear models are the result of linear optimization where
Results after linear optimization
We start with an analysis of the results obtained after the first stage of optimization, i.e. the non-linear
Table 3 provides an overview of model performance on training and test data set for the linear and non-linear case. We analyze the %-fit value introduced by Eq. (24), with Table 4 containing the corresponding parameters. For this first part of the analysis, we focus on the performance of the LSO and LDO models. The LSO achieves a
We have relied only on time series data for training and testing. The obtained model should properly characterize the system. It is now possible to asses its impulse response (Figure 5) and also the frequency response (Figure 6). For further (post processing) analysis, we use the impulse and frequency response data from Silva et al. 13 as reference data for validation.
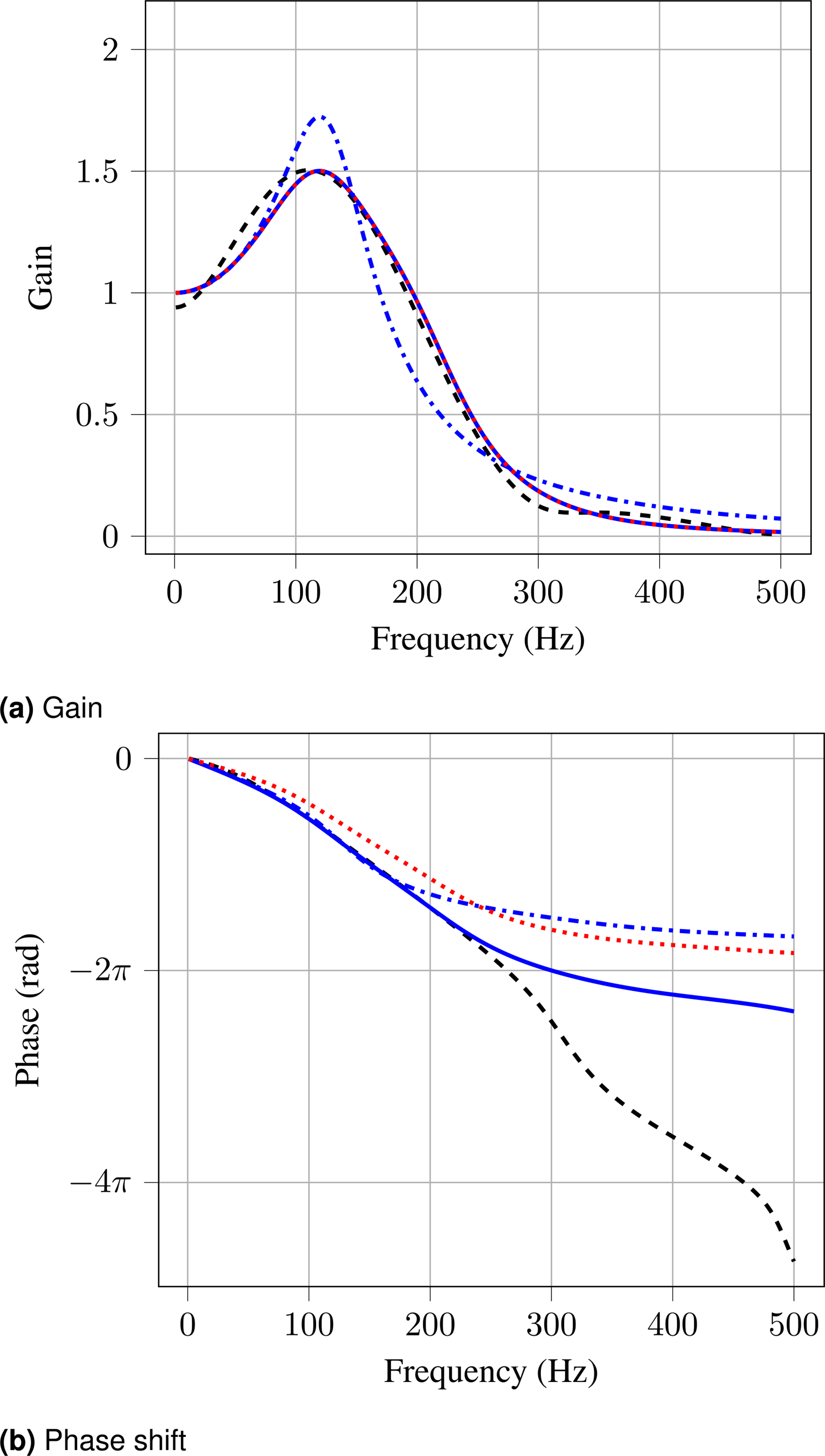
Gain (a) and phase (b) of LDO (blue, solid), LSO (blue, dash dotted) and LDO without delay (red, dotted) after first (linear) stage of optimization.
We start by analysing the impulse response of the obtained LSO and LDO models, both depicted in Figure 5. As pointed out at the beginning of the paper, the impulse response of the flame is remarkably similar to a simple mass-spring-damper system. The LDO is capable of nearly exactly mimicking the impulse response of the flame. Only the initial dip as well as the position and value of the response peak are slightly off-set in comparison to the reference response. The LSO is also capable of modelling large parts of the flame impulse response. Again, the position and magnitude of the peak are off-set from the reference data. In addition, the LSO impulse response separates from the target response around
Next, we analyze the models gain and phase depicted in Figure 6. Up to around
To further illustrate the reasoning for a time delay calibration
Moving on to the phase shift of the LSO and both LDO’s, we can observe that the LSO (which is using a delay) matches the phase characteristics of the flame up to a frequency of around
Considering the results presented so far, the LDO represents a time domain model capable of modelling the linear dynamics of a laminar premixed flame with satisfactory precision. It does so using only three constants
In this work, the LDO represents an intermediate optimization result, which is further extended to also model non-linear aspects of the flame response (namely by parameter
Results after Non-Linear optimization
So far, the discussed results demonstrate the power of our simple LDO model and its superiority in comparison to the LSO model. We thus refrain from further discussion of the non-linear single mass model (NLSO), although for the sake of completeness its performance on time data is also stated in Table 3.
As for the linear models, we analyze the performance in the time domain using a %-fit value. The results are shown in Table 3. When applying the non-linear models to the non-linear data set, compared to the LDO, we can observe an increase of performance in the order of
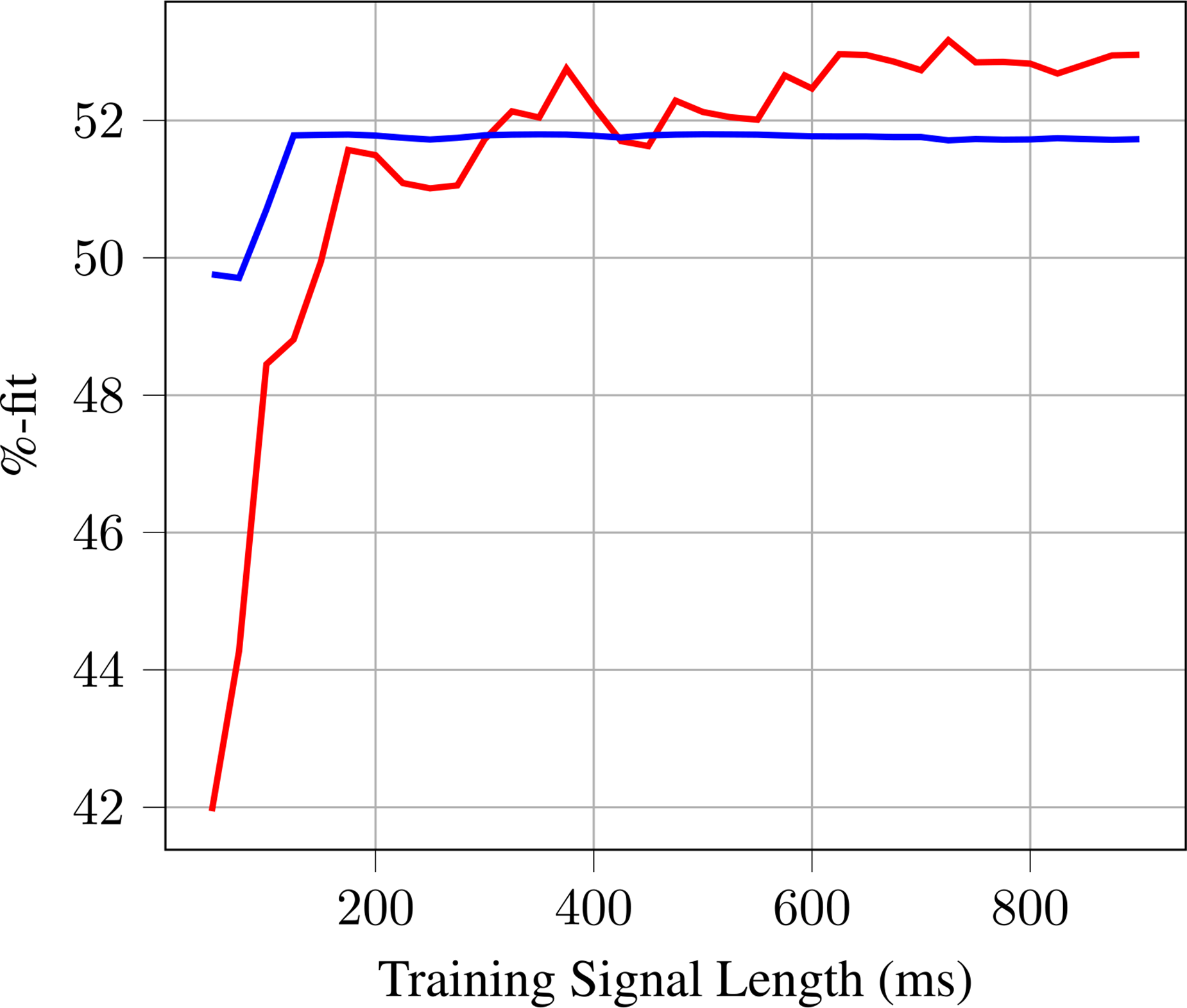
Obtained %-fit by model NLDO on non-linear training data (red curve) and non-linear test data (blue curve) when being optimized on training signals with different lengths.
Figure 7 illustrates the performance of the fully optimized NLDO on linear and non-linear test data. As suggested by the presented %-fit values, performance on the linear data is remarkably good. The basic linear flame dynamics are fully captured by the model at hand. While performance on the non-linear data set is worse, the predictions of the model are still capable of correctly following the dynamics of the flame. Certain features of the flame signal, as well as narrow signal peaks, cannot be fully predicted, but the general, underlying non-linear flame dynamics are very well captured.
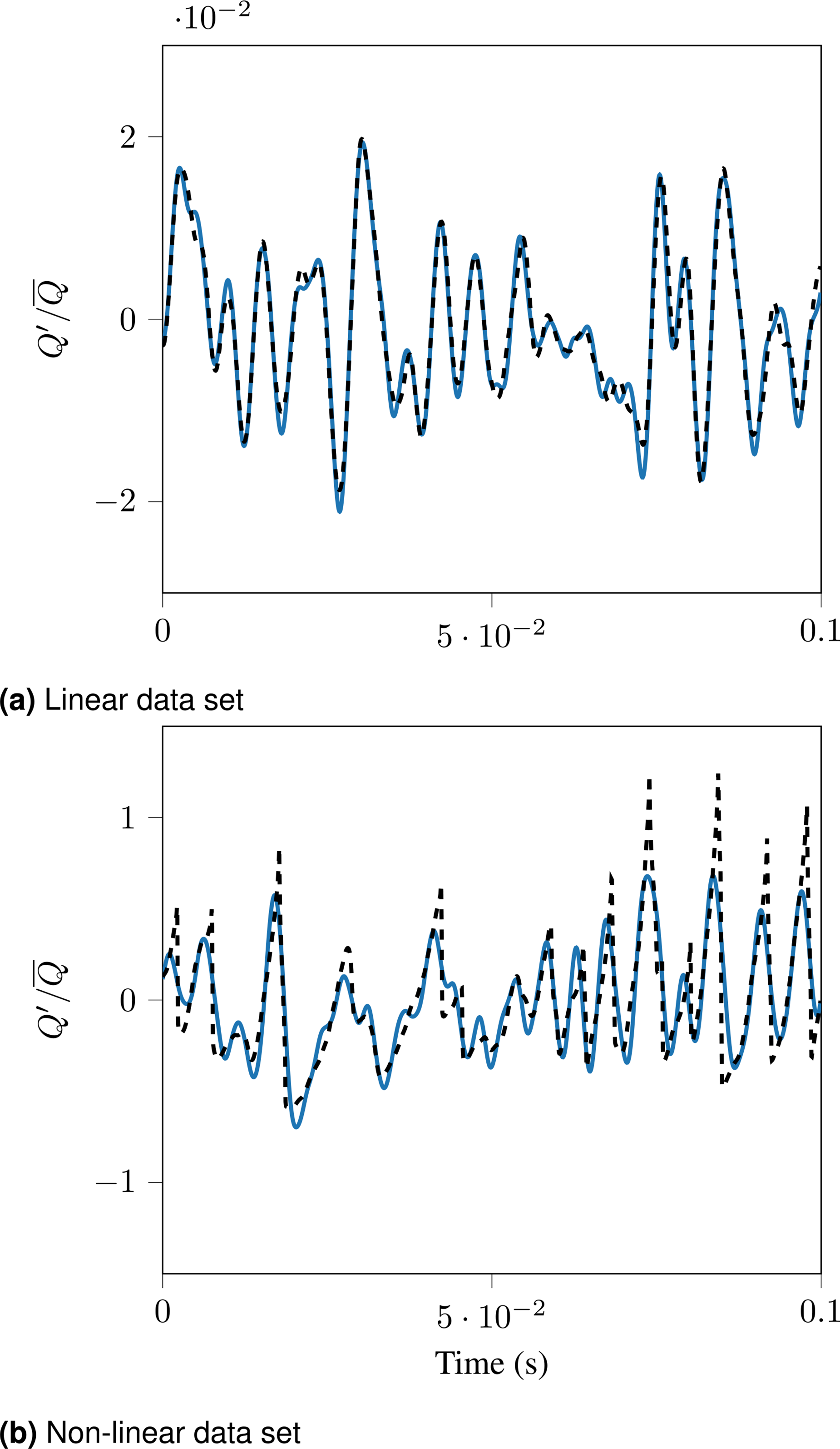
Excerpt comparing the output prediction of the NLDO to reference test data for the linear data set (a) and the non-linear data set (b). Only the last 100 milliseconds are plotted.
As for the linear models, we obtained a model fully characterising the system using only time series data. In post processing, we again assess its frequency response (Figure 8). For the non-linear data case, we use flame frequency response data from Haeringer et al.
5
as reference data. Starting with the gain, we can observe a good qualitative match of the saturation effects present in premixed flames. The initial slope of the reference gain is matched well for all forcing amplitudes. Gain prediction for the smallest forcing amplitude matches the reference case at best. This excellent match can be explained by our staged optimization approach, which ensures maintaining the good performance for the linear regime demonstrated in Figure 6. The match of gain characteristics decreases with increasing magnitude of the forcing amplitudes - i.e. with further deviation from linear dynamics. Even though, matching of the reference gain characteristics is significantly worse than for the linear case, the physically important low frequency limit of one, the general saturation characteristic as well as the low-pass filter behaviour are well captured. Considering the phase prediction of the NLDO model, we observe a good qualitative match for frequencies up to around
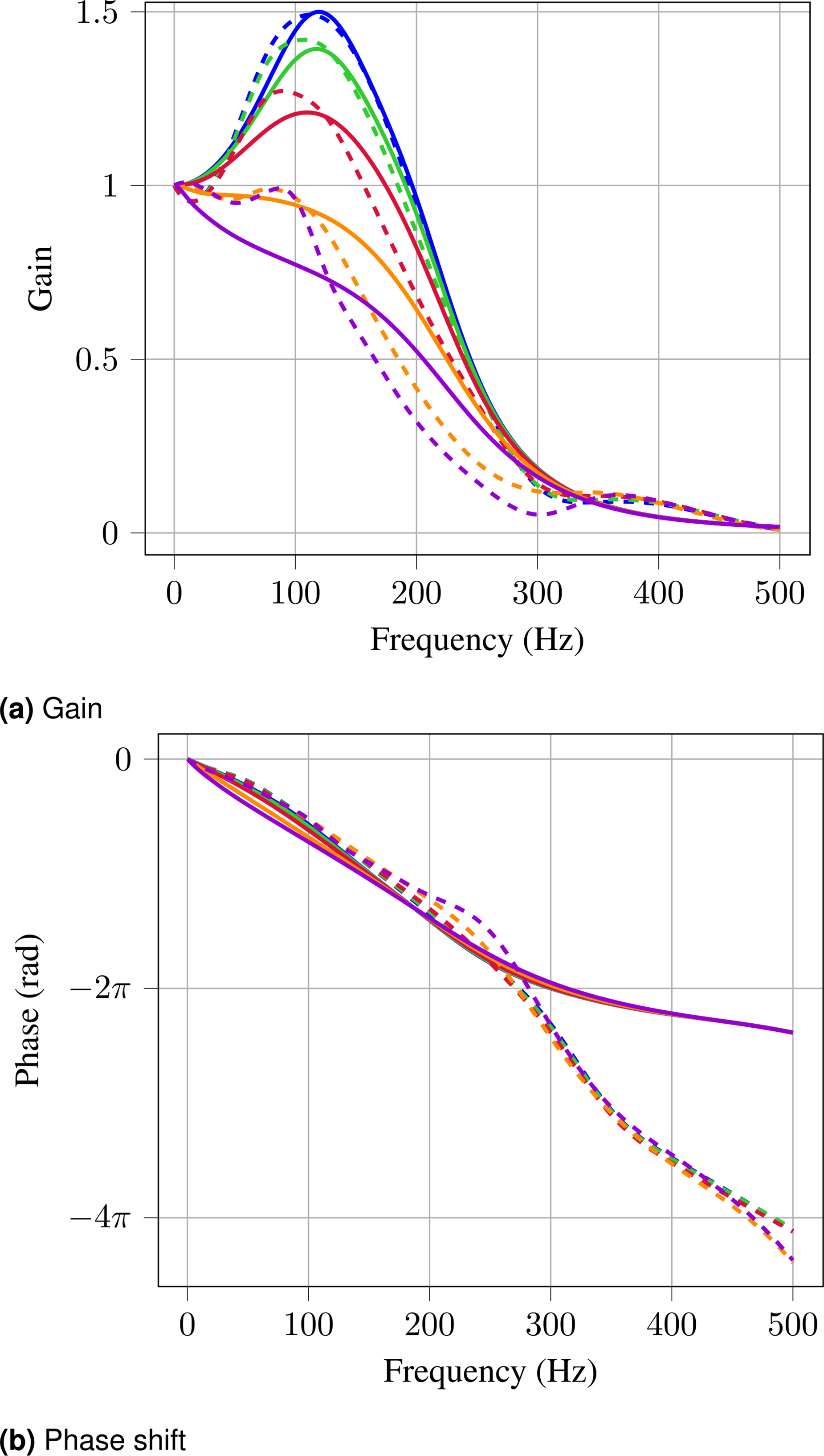
Gain and phase of the optimized NLDO model (solid) and reference xFDF (dashed). Different colours represent different forcing amplitudes of 0.025 (blue), 0.25 (green), 0.5 (red), 1.0 (orange), 1.5 (purple).
The NLDO model utilizes only four adjustable parameters to achieve the presented effect in the time domain as well as in the frequency domain. The so obtained model is extremely lean in comparison to the reference xFDF model proposed by Haeringer et al.
5
, relying on data from
Conclusions and outlook
In this work we have shown that two mass-spring-damper coupled oscillators with only one non-linear term in its two equations – a remarkable simplification of Eq. (2) – is sufficient for a good qualitative representation of the non-linear flame response of a typical laminar premixed flame. Following an optimization approach that makes use of time series data stemming from CFD, the four parameters of the model are calibrated. No a-priori knowledge of the FTF or FDF of the system under investigation is required. The soundness of the proposed phenomenological model becomes evident when evaluating not only the impulse response and corresponding frequency response (FTF) but also the describing function (FDF) of the trained model. We show that the model labelled as NLDO is able to capture the low-pass filter behaviour, the low frequency limit and the gain saturation that a typical FDF exhibits. To our knowledge, no other ODE model exists that is capable of retrieving the aforementioned three characteristics. A Wiener-Hammerstein model (see Dowling 3 for example) would not be able to capture the low frequency limit as it assumes a static saturation related to the input or output.
Equation (2) and the results presented may suggest that better results could be obtained if additional dimensions (additional oscillators) are considered in the model. Indeed, the increase in performance when adding one additional mass (switching from LSO to LDO) is evident not only from the %-fit values stated in table 3 but can also be observed in the impulse response (Figure 5), as well as in gain and phase (Figure 6). This increase in performance can largely be attributed to an improved phase modelling. Thus, adding more oscillators to the system could be of help if the phase description accuracy given by the model needs to be increased. Note, however, that a further increase in the number of masses, and thus oscillators significantly increases the complexity of the model, which may be detrimental for the optimization procedure.
When deriving the model Eqs. (18) and (19) describing the NLDO, we assumed a uniform parametrization of the masses. This assumption reduces the number of adjustable parameters significantly. One could assume a non-uniform parametrization in the described method, also obtaining well performing models. The performance, however does not improve significantly, while the complexity of the model does.
In the presented work we limited the addition of non-linear terms to one term
An additional extension of the present work could focus on data coming from turbulent premixed flames. At that point it would be interesting to evaluate the robustness of the coupled oscillator model when presented to data corrupted by noise, which in that case is directly related to the noise produced by combustion. It is also of high interest to determine how many additional dimensions are required in order to retrieve features typical of turbulent flames, such as crests and valleys (local maxima and minima) in the gain response. A practical way of increasing the amount of dimensions – and thereby the power capability of the model – may consist of a mere linear superposition of NLDOs. Such a strategy is currently being investigated in our group.
The non-linear flame response model proposed is a parsimonious set of ODEs. Accordingly, it is a continuous-time model and, as such, is ideal for inexpensive, time-domain acoustic simulations (when coupled with appropriate low-order acoustic models), where signals exhibit a broad amplitude and frequency distribution. Note that, contrary to time-domain low-order models coupled with an FDF, no knowledge of the instantaneous amplitude and frequency of the signals is required.