
Abstract
Based on the modulus decomposition, the structured nonlinear complementarity problem is reformulated as an implicit fixed-point system of nonlinear equations. Distinguishing from some existing modulus-based matrix splitting methods, we present a flexible modulus-based inexact fixed-point iteration method for the resulting system, in which the subproblem can be solved approximately by a linear system-solver. The global convergence of the proposed method is established by assuming that the system matrix is positive definite. Some numerical comparisons are reported to illustrate the applicability of the proposed method, especially for large-scale problems.
Keywords
Introduction
This work concentres on the following structured nonlinear complementarity problems (abbreviated as SNCP): Find


The SNCP with the form (1) has been broadly used in optimization theory and real-world applications consisting of nonlinear programming, financial analysis, economic equilibrium and engineering simulation.1–3 For instance, the famous Karush–Kuhn–Tucker conditions of nonlinear programming, 4 the advection-diffusion control problems, 5 the American-style option pricing problems,6,7 and the moving boundary problems. 8 Such problems can be modeled as finite-dimensional nonlinear complementarity problems NCPs of weak nonlinearity by resorting to some discretization schemes (e.g. 5-point difference method, time-state discretization, and grid method). To pursue the high accuracy of the model, scholars usually take a very fine discretization operation on the aforementioned problems, which leads to a very large-scale SNCP (at least millions).
For the standard NCP, the equation-based approaches are state-of-the-art methods. Founded on the NCP function, we can reformulate the NCP as a system of nonlinear equations. Thereby, some smoothing-based and semismooth Newton-type algorithms9–17 are recommended for the resulting system. Also, due to the equivalence between the standard NCP and the variational inequality problem over
Recently, the MBMS-type methods have been extended to a class of NCPs with weak nonlinearity. By assuming that
To utilize the structure of matrix We propose an inexact fixed-point method based on the modulus decomposition, and establish the global convergence under some mild assumptions. The subproblem in the proposed method is a linear system of equations. If Without any extra acceleration techniques and precondition schemes, some numerical experiments on large-scale SNCP display that the proposed method outperforms some existing MBMS methods.
The rest of the paper is outlined as follows. The MBIFP iteration method for problem (1) is proposed in Section “The Modulus-Based Inexact Fixed-Point Method”. In Section “Convergence Analysis”, we establish the global convergence of the proposed method. To show the effectiveness of the proposed method, some numerical comparisons are reported in Section “Numerical Experiments”. Finally, in Section “Conclusions” we conclude this paper with some final remarks.
The modulus-based inexact fixed-point method
As usually, the Euclidean norm
Let


If
Suppose that


Conversely, suppose that If If If
In summary, we have that





Based on the Theorem 1, we are ready to propose the MBIFP method for solving the system (4), and equivalently solving the problem (1). Essentially, the method can be treated as a generalized framework of the MBMS method introduced by Bai. 23 Algorithm 1 below outlines our method in detail.
Modulus based inexact fixed point method, MBIFP

The system If If If
There are many efficient inexact methods for the linear system


Convergence analysis
In this section, we prove that the sequence
Let 
According to the position relationship between the real number

Suppose that the system matrix 

By (7), Proposition 1 and Cauchy–Schwarz inequality, we have that For (c1) we have
Let 
For (c2) we have
Let 
If the assumptions of Proposition 2 hold, then
By the assumptions, we have
(1) If 

For representation convenience, we set
Suppose that the assumptions of Propositions 2 hold. If
Let 
(1) If 

(2) If 


Suppose that the assumptions of Propositions 2 hold, 
By the step 
For 

If the assumptions of Lemma 2 hold, then



The following theorem analyses the global convergence of Algorithm 1.
Suppose that the assumptions of Lemma 2 hold, and
Proof By Lemma 3, we have
Next, we only need to prove that the right-hand-side of inequality (21) converges to zero as 

Numerical experiments
In this section, some numerical experiments are presented for testing the effectiveness and performance of the proposed method. Specially, the CBB method proposed in Raydan and Svaiter
32
is adopted as a solver
Linear system solver
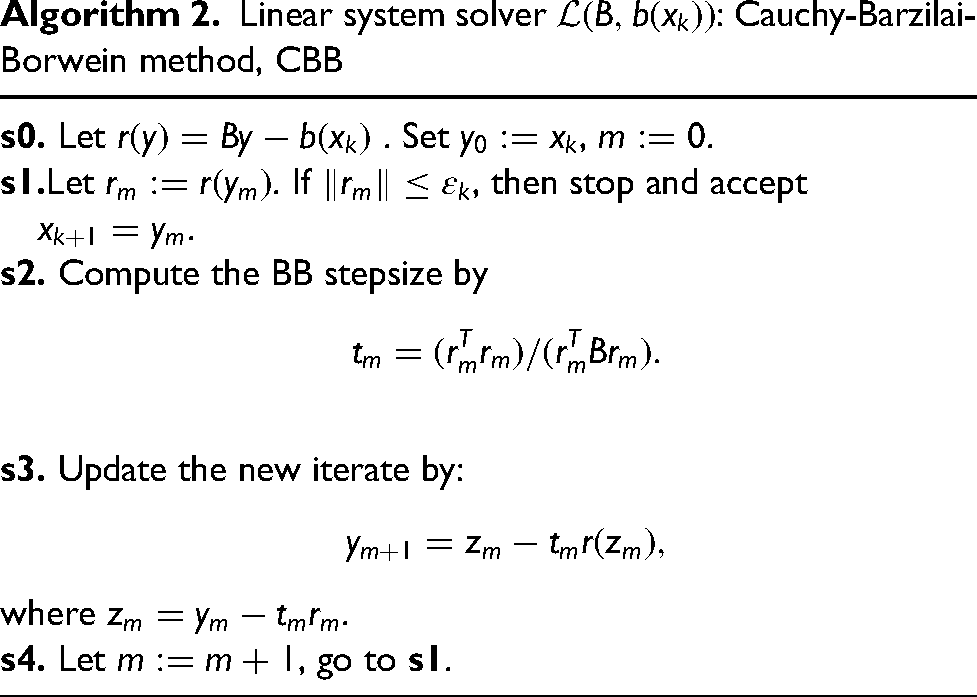
We denoted by MBIFP-CBB the Algorithm 1 cooperated with the CBB method (Algorithm 2). The MBIFP-CBB method is compared to the modulus-based successive over-relaxation (MSOR for short) method , two-step MSOR (TMSOR for short) method and two-step modulus-based accelerated over-relaxation (TMAOR for short) method. For details of the compared methods, see Xie et al. 30 All the mentioned methods were coded by MATLAB R2016b and run on a PC with 1.60 GHz CPU and 8 GB RAM.
In the implementation of all methods, the stopping criterion is set to For the MSOR and TMSOR methods, three choices on parameter For the TMAOR method, two choices of For the proposed MBIFP-CBB method, we set 
The notations used in Tables 1 and 2 are interpreted as follows: ind: performance indicators at termination of algorithm; n: dimension of test example; iter: total number of outer iterations; avg-init: average number of inner iterations; cput: CPU time in seconds; res: residual error defined by stopping criteria;

The values of
The numerical results on Example 1.

TMAOR: two-step modulus-based accelerated over-relaxation; MSOR: modulus-based successive over-relaxation; MBIFP: modulus-based inexact fixed-point; CBB: Cauchy–Barzilai–Borwein.
The numerical results on Example 2.

MSOR: modulus-based successive over-relaxation; TMSOR: two-step modulus-based successive over-relaxation; TMAOR: two-step modulus-based accelerated over-relaxation;MBIFP: modulus-based inexact fixed-point; CBB: Cauchy–Barzilai–Borwein.
In SNCP (1), 
In SNCP (1), 
(i) The nonlinear terms

The relationship between
The proposed MBIFP-CBB method is compared with MSOR, TMSOR and TMAOR methods on Examples 1 and 2. The method that has the least CPU time (in seconds) is selected as the winner and represented by bold fonts. Besides, to further validate the performance of these methods, we set

Residual comparision with

Residual comparision with
From Tables 1 and 2 and Figures 3 and 4, one can find that all methods are convergent in the numerical experiments. In almost all settings in these experiments, the number of total iterations and the CPU time of the MBIFP-CBB method have the most obvious superiority to that of the MSOR, TMSOR, and TMAOR methods.
Conclusions
The SNCP is reformulated as a nonsmooth implicit fixed-point system
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received the following financial support for the research, authorship, and/or publication of this article: This work was supported partly by the National Natural Science Foundation of China with grant 12071398, the Natural Science Foundation of Hunan Province with grant 2020JJ4567 and the Key Scientific Research Found of Hunan Education Department with grants 20A097.