The problem of robust H∞ filtering for Markovian jumping static neural networks with time-varying delays is considered in this paper. The effect of the activation function on the time delays is comprehensively considered. Based on Wirtinger inequality, a new inequality is quoted to solve the Lyapunov functions with the double-integral terms. Then, a less conservative result on the robust H∞ filtering is obtained, which guarantees the resulting error systems stochastically stable and satisfies a prescribed H∞ performance index. The effectiveness of the developed results is finally demonstrated by numerical examples.
Markov system is a dynamic stochastic system with multiple modes (subsystems). Because the Markov system can be modeled by the external random disturbance, the research of Markov jump system has attracted much attention of scholars in recent years. The actual engineering project can be described by the Markov system in modeling, such as the macro forecast and decision model in the economic field, the queuing model in the field of computer control, and so on. In 1961, Krasovskii and Lidskii.1 established a continuous time Markov structure model. In 1971, Darkhovskii and Leibovich2 studied a class of Markov systems with the same distribution of switching times. In 1999, Mao et al.3 researched the stochastic functional differential equations with Markov jumping switching and got many criteria about M matrix exponential stability. In 2005, Wen et al.4 designed a class of hybrid delay Markov jump systems. Recently, it has been found that closed phenomena usually occur in neural networks. Kovacic,5 Benuskova and coworkers,6 and Zhang and Wang7 proposed to extract finite state representation from neural networks to solve this phenomenon; but, in this case, the model of neural network is limited. In these years, the static neural network with Markov jumping switching has received a wide range of researchers sought.8–13
On the other hand, due to its theoretical and practical significance in control engineering and signal processing, the filter problem has been extensively researched in Lack and Kappa14 and Feng and Han.15 In the existing literatures, the Kalman filter16 is one of the most effective method which deals with the problem of state estimation. However, when the dynamic unknown noise signal is assumed to be bounded, the H∞ filter17–20 is more suitable.
When the overall energy of a system is below a given threshold, the estimated error is resulted from minimization of the bounded disturbance energy. Therefore, in some practical applications, when the estimated maximum error needs to be in a certain range or minimized, we often use peak filter.
In 2012, Chen and Zheng19 designed the H∞ filter of stochastic systems with time delays and Markovian jumping parameters. In this paper, based on Lyapunov–Krasovskii functional (LKF) theory and generalized Finsler Lemma, delay-dependent bounded real lemma is established without using any model transformations, bounding techniques for cross terms, or additional free matrix variables. In 2015, Shao et al.20 considered the H∞ filtering problem of static neural networks with Markovian jumping parameters, and time-varying delay, the Jensen inequality, and Wirtinger inequality are quoted to deal with the Lyapunov function.
In this paper, we will further consider the problem of robust H∞ filtering for Markovian jumping static neural networks with time delays. We consider the effect of the activation function on the time-varying delays. On this basis, a filter is designed to ensure a prescribed H∞ performance level of the filtering error systems. Motivated by Shao et al.,20 the double and triple integral terms of Lyapunov functions are taken into consideration. Then, according to the Wirtinger inequalities in Seuret and Gouaisbaut,21 a new inequality is quoted to reduce the conservatism of Lyapunov–Krasovskii techniques in this paper.24 The stability criteria are formulated in terms of LMIs. Finally, numerical examples show that the proposed filter is less conservative.
Throughout this paper, denotes the n-dimensional Euclidean space, is the set of m × n real matrix, I is the identity matrix, || · || denotes Euclidean norm for vectors, and at stands for the transpose of the matrix A. For symmetric matrices X and Y, the notation X > Y (respectively, X ≥ Y) means that the X − Y is positive definite (respectively, positive semi-definite). The symmetric terms in a symmetric matrix are denoted by * and diag{Z1, Z2, … , Zn} denotes a block-diagonal matrix. E{x} stands for the expectation of the stochastic variable, and L2 [0, ∞] is the space of the square integrable vector functions over [0, ∞].
Problem formulation
First, for , rt, taking values from a finite set is a right-continuous Markov chain defined on a complete probability space . Consider the following Markvoian jumping system
where is the state vector of the neural networks with n neurons, is a constant diagonal matrix with , is the disturbance input in ], is the measured output and is the signal to be estimated, denotes the neuron activation function, for , are the constant matrices with compatible dimensions, and and are external input vector, is a real valued initial function, and is a time-varying delay with an upper bound and scalar μ, such that satisfies
Remark 1
The robust filtering problem has been studied by Shao et al.20 and Huang et al.23 The problem of time-varying delay in activation function is considered by Shao et al.,20 but the general situation without time delay is passed. While in Huang et al.,23 the activation function for given delay is considered. In this paper, we consider these two cases, and the composite model is more suitable for the industrial system in the face of time variation.
For simplicity, in the sequel, the matrices and are denoted by , , and so on.
Its transition probability between different modes is given by
where , ; , , and for , .
For systems (1), we now consider the following state estimator
where and and are designed matrices with compatible dimensions. Augmenting the model of equation (1) to include the states of the filter in equation (3), we obtain the following filtering error systems
Defining the error signals and , , .
The filtering error systems are asymptotically stable when , and the error systems satisfy
for any nonzero under the zero-initial condition.
Assumption 1
The activation function is continuous and satisfies
where , , and and are real scalars, and it may be positive, negative, or zero, which means that the function is more general.
Assumption 2
First, we define the weak infinitesimal operator as
(Schur complement) For one given matrix which satisfied
where , , and with compatible dimensions, the following conditions are equivalent:
Main results
We first analyzed the filtering problem mentioned in the preceding section and gave the following result.
Theorem 1
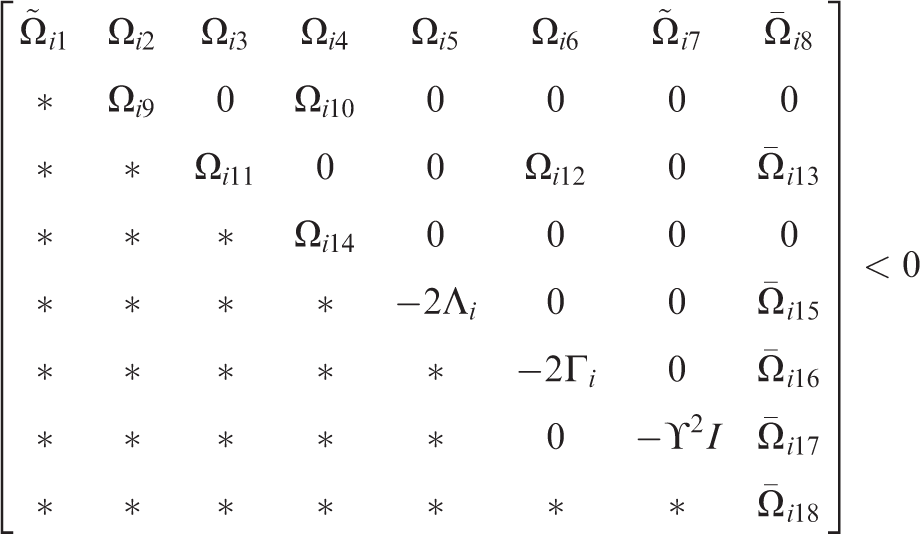
For the given scalars and in equation (2), the resulting error systems (4) are stochastic stable with performance , if there exist real matrices , , , , , , ,, and diagonal matrix . Such that, the following LMIs hold for
where
Then, the gain matrices can be designed as .
Proof
Choosing the following LKF candidate as
According to the weak infinitesimal operator , we have the stochastic differential
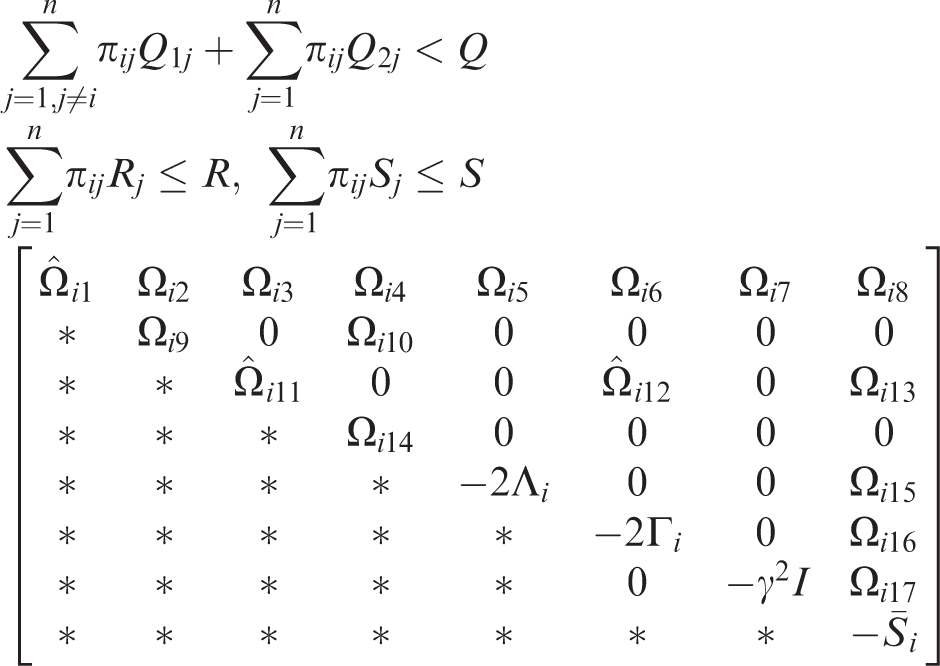
For the given scalars and in equation (2), the resulting error systems (13) are stochastically stable with performance , if there exist real matrices , , , , , , ,, diagonal matrix , and . Such that, the following LMIs hold for
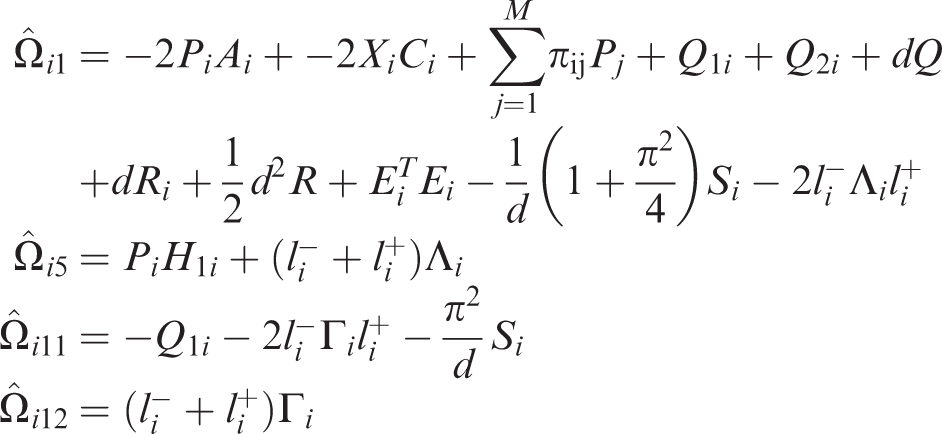
where
The gain matrices can be designed as .
Remark 2
According to Huang et al.,23 this paper has quoted the Lyapunov functions in Shao et al.,20 by applying integral inequalities in lemmas 1 and 2, the resulting filtering error system is stochastically stable, and a prescribed performance is guaranteed. Then, the calculated maximal upper bounds of the time delay are larger.
If we let , , and , we can get an error system as20
Corollary 2
For the given scalars and in equation (2), considering the resulting error systems (14) are stochastically stable with performance , if there exist real matrices , , , , , , ,, diagonal matrix , and . Such that, the following LMIs hold for
where
The gain matrices can be designed as .
Remark 3
Compared with Shao et al.,20 this paper has quoted the integral inequality in lemma 2, where no slack variable is involved. With this different method, the prescribed performance is smaller than that in Shao et al.20 Example 2 is finally provided to show the advantage of the proposed approach over the existing results.
Examples
Example 1
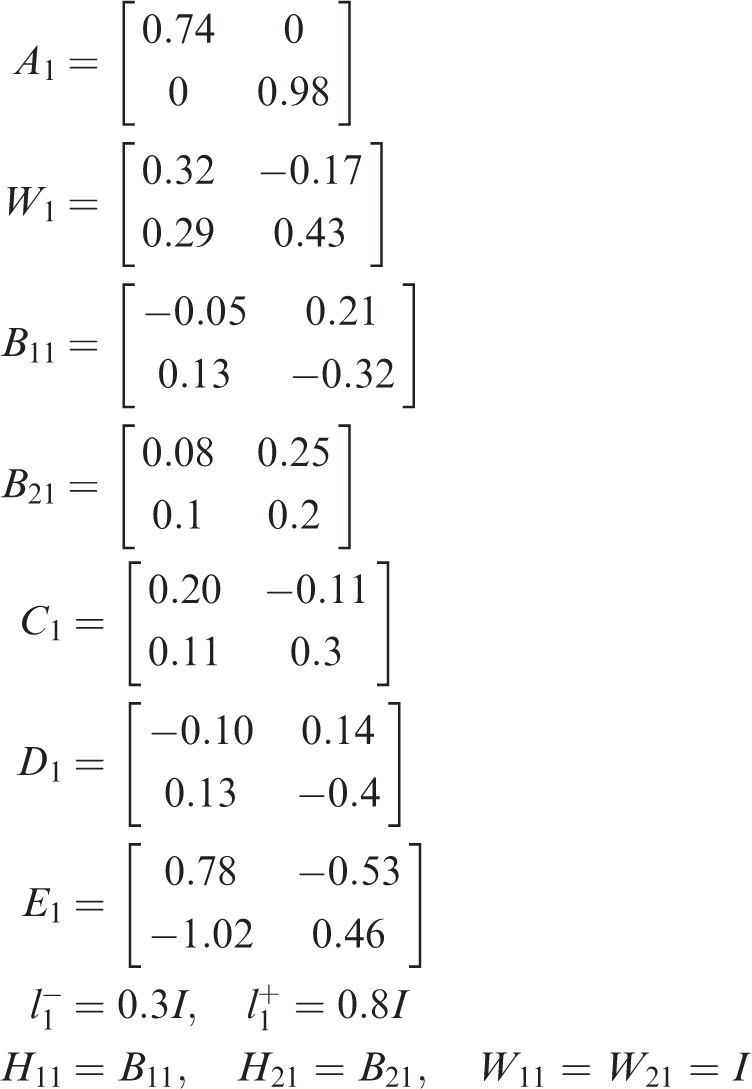
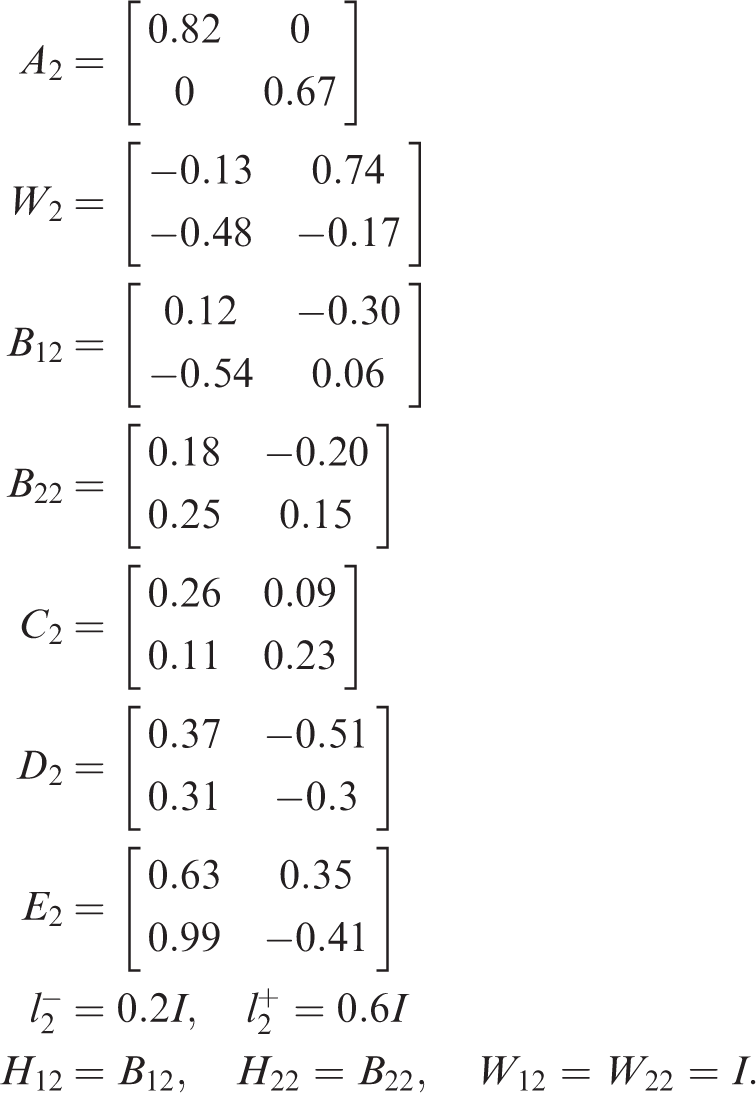
In this part, we choose the following numerical example of Markov jumping system:
Mode 1
Mode 2
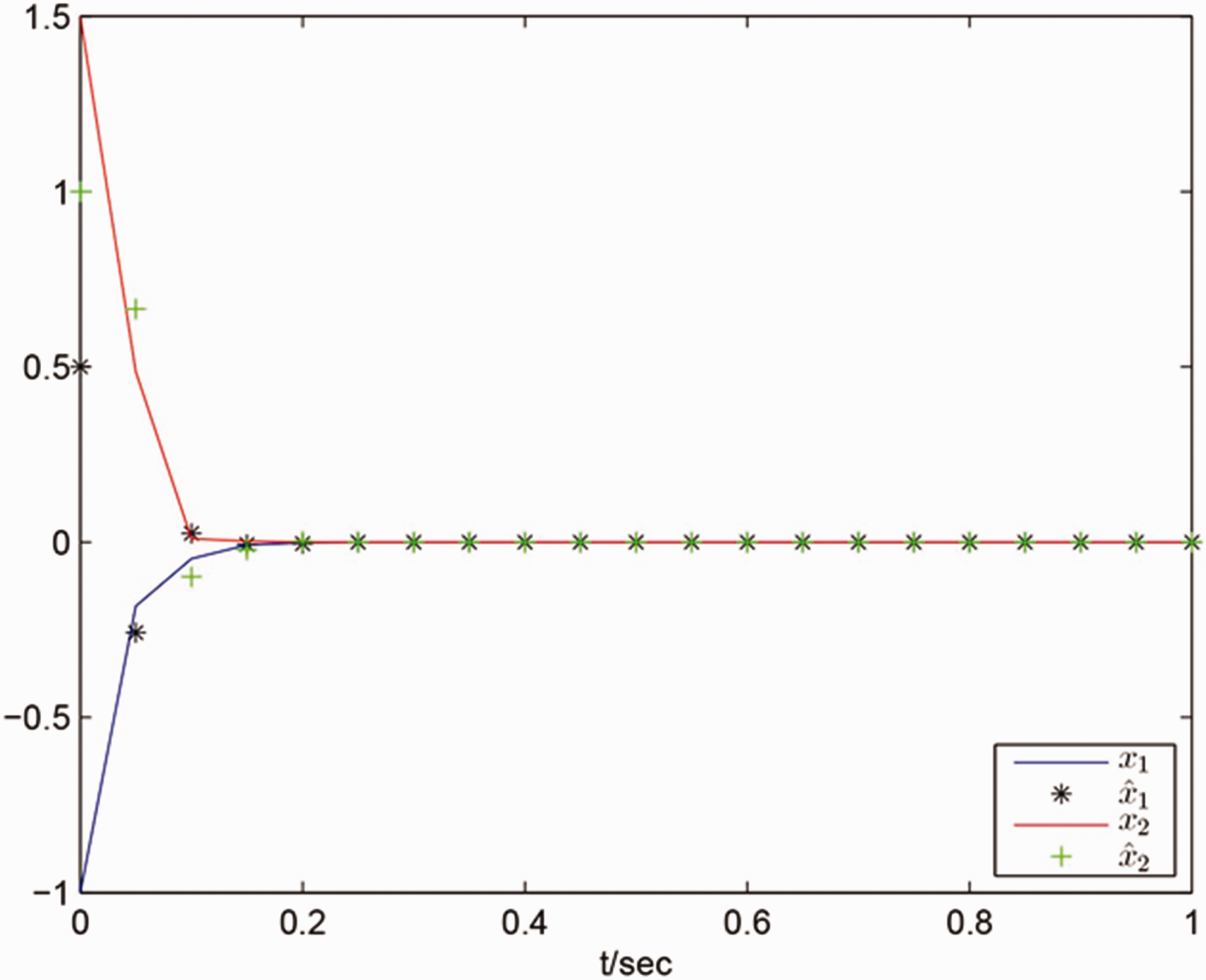
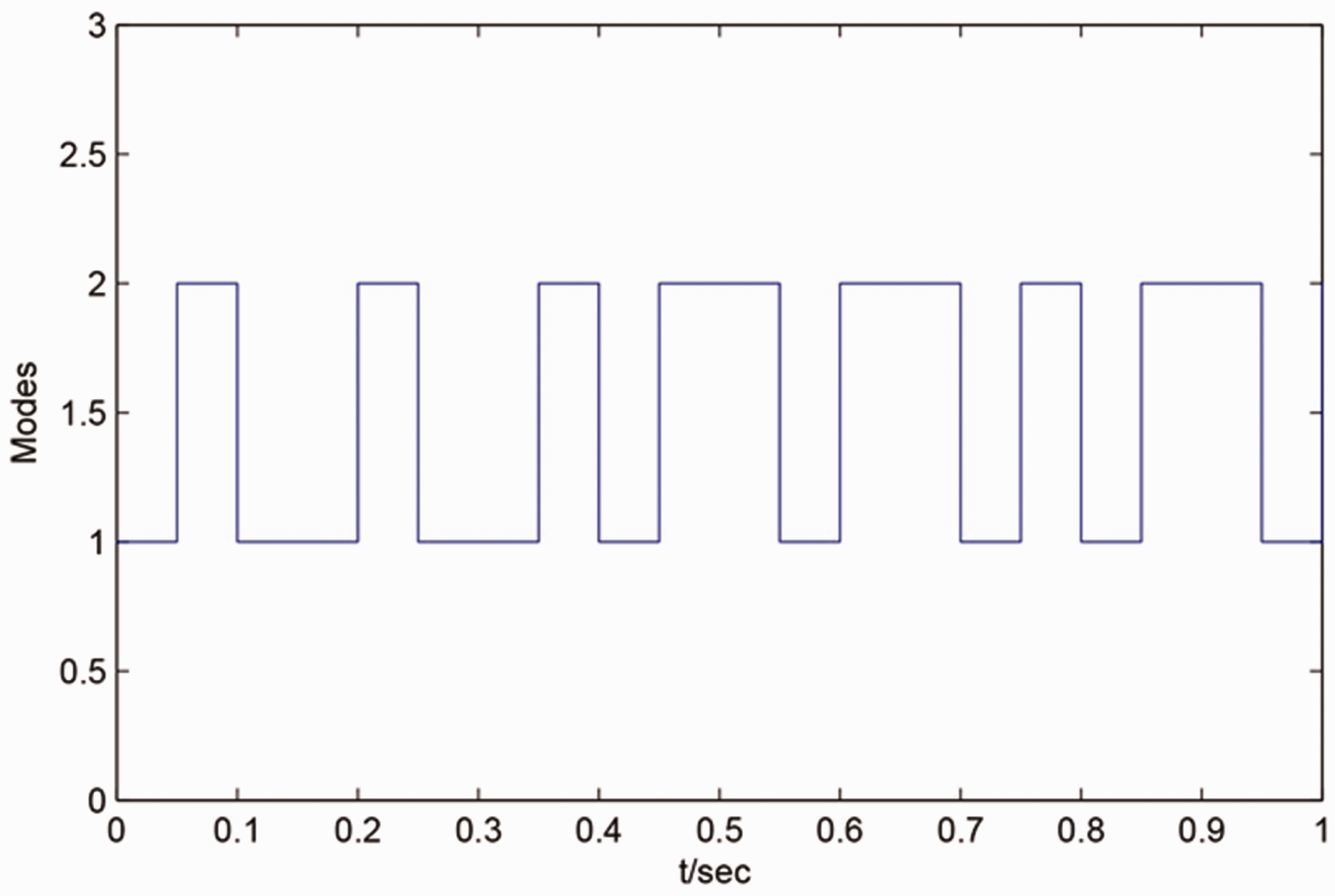
When the time delay is constant, we let , and the stability criterion of Huang et al.23 gives the upper bound of the time delay being 1.9518. However, from Corollary 1, the calculated maximal upper bounds of the time delay are 2.1848. Therefore, for this system, the results are more effective than reference.23 To further show the effectiveness of this paper, we let the activation functions as and . The noise disturbance is chosen as , when and . Under the initial condition , the simulation results are plotted in Figures 1
In this part, we consider the numerical example of Markov jumping system in the literature20
Mode 1
Mode 2
First, we let and change the upper bound of the time delay ; Table 1
performance index γ for different d.
d
0.4
0.6
0.8
1.0
1.2
Theorem 118
1.6684
2.3948
3.3094
5.4958
53.6441
Corollary 2
0.5331
1.0067
2.3948
5.1925
49.6213
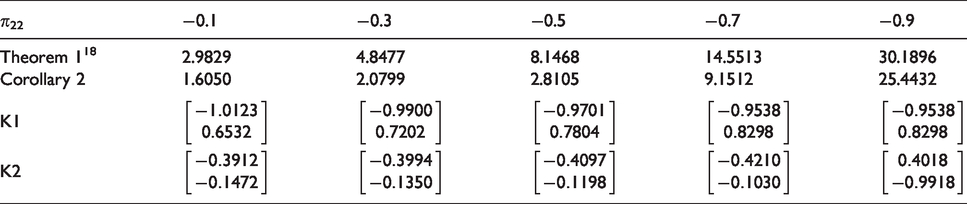
lists the results. Then, according to Shao et al.,20 we have ; for different with , the optimal performance index is obtained by Corollary 2, which is compared with the existing results derived in Shao et al.20 It is summarized in Table 2
performance index γ for different
π22
−0.1
−0.3
−0.5
−0.7
−0.9
Theorem 118
2.9829
4.8477
8.1468
14.5513
30.1896
Corollary 2
1.6050
2.0799
2.8105
9.1512
25.4432
.
Conclusions
In this paper, we have investigated the problem of robust filtering for Markovian jumping static neural networks with time-varying delays. The influence of time-varying delay on the system is comprehensive considered. A filter is designed not only to ensure the filtering error system robust stability, but also to meet the given performance index. Double and triple integrals are quoted based on the improved Wirtinger inequality to reduce the conservatism. Numerical examples have been given to illustrate the effectiveness of our method.
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Natural Science Foundation of Jiangsu Province under Grant Nos. 16KJB520051 and 19KJB520060.
Footnotes
ORCID iD
Nan Zhang
References
1.
Krasovskii NM and Lidskii EA.Analytical design of controllers in systems with random attributes. Automation & Remote Control, 1961, 22(1): 1021–2025.
2.
Darkhovskii BS and Leibovich VS. Statistic stability and momenta of output signal of certain class of systems with random change of structure. Avtomat I Telemekh,
1971: 36–43.
WenSZengZHuangT.
Reliable H1 filter design for a class of mixed-delay Markovian jump systems with stochastic nonlinearities and multiplicative noises via delay-partitioning method. Int J Control Autom Syst2012;
10: 711–720.
5.
KovacicM.
Timetable construction with Markovian neural network. European J Oper Res1993;
69: 92–96.
6.
TinoCernanskyPMBenuskovaL.
Markovian architectural bias of recurrent neural networks[J]. IEEE Trans Neural Netw2004;
15: 6–15.
7.
ZhangHWangY.
Stability analysis of Markovian jumping stochastic Cohen-Grossberg neural networks with mixed time delays. IEEE Trans Neural Netw2008;
19: 366–370.
8.
ChenYZhengW.
Stochastic state estimation for neural networks with distributed delays and Markovian jump. Neural Netw2012;
25: 14–20.
9.
ShenYWangJ.
Noise-induced stabilization of the recurrent neural networks with mixed time-varying delays and Markovian-switching parameters. IEEE Trans Neural Netw2007;
18: 1857–1862.
10.
YangXCaoJLuJ.
Synchronization of Markovian coupled neural networks with nonidentical node-delays and random coupling strengths. IEEE Trans Neural Netw Learn Syst2012;
23: 60–71.
11.
ZhaoYZhaoLShenS, et al.
Robust stability criterion for discrete time uncertain Markovian jumping neural networks with defective statistics of modes transitions. IEEE Trans Neural Netw2011;
22: 164–170.
12.
ZhuQCaoJ.
Exponential stability of stochastic neural networks with both Markovian jump parameters and mixed time delays. IEEE Trans Syst2011;
41: 341–353.
13.
ZhuQCaoJ.
Stability analysis of Markovian jump stochastic BAM neural networks with impulse control and mixed time delays. IEEE Trans Neural Netw Learn Syst2012;
23: 467–479.
14.
LackDACappaCDCovertDS.
Bias in filter-based aerosol light absorption measurements due to organic aerosol loading: evidence from ambient measurements. Aerosol Sci Technol2008;
42: 1033–1041.
15.
FengJHanK.
Robust full-and reduced-order energy-to-peak filtering for discrete-time uncertain linear systems. Signal Processing,2015;
108: 183–194.
16.
ShiPBoukasEAgrwalR.
Kalman filtering for continuous time uncertain systems with Markovian jumping parameters. IEEE Trans Autom Control1999;
44: 1592–1597.
17.
SunTSuHWuZ, et al.
H∞ filtering over networks for a class of discrete-time stochastic system with randomly occurred sensor nonlinearity. Journal of control ence and engineering, 2012: 7. DOI: 10.1155/2012/438183.
18.
WangYShiPWangQ, et al.
Exponential H1 filtering for singular Markovian jump systems with mixed mode-dependent time-varying delay. IEEE Trans Circuit Syst I2013;
60: 2440–2452.
19.
Chen Y, Zheng W X. H1 filter design of stochastic Markovian jump delay systems. In: Control and decision conference, 2012, pp.417–417. Piscataway, NJ: IEEE.
20.
ShaoLHuangHZhaoH, et al. Neurocomputing2015;
153: 126–132.
21.
SeuretAGouaisbautF.
On the use of the Wirtinger inequalities for time-delay systems. IFAC Proc Vol2012;
45: 260–265.
22.
GuKKharitonovVLChenJ. Stability of time-delay systems.
Berlin, Germany:
Springer, 2003.
23.
Huang H, Chen X and Hua Q. H1 filtering of Markovian jumping neural networks with time delays. In: International conference on advances in neural networks, 2013, pp.214–221. Berlin, Germany: Springer.
24.
MaQHuC.
Robust H2/ filtering for uncertain continuous systems. Control Decis2007;
22: 318–321.