
Abstract
A novel control approach based on Wirtinger inequality is designed for nonlinear chaos synchronization time delay system. In order to reduce the conservatism for the stability criterion, a Lyapunov–Krasovskii functional with triple-integral term is constructed. The improved Wirtinger inequality is used to reduce the conservative which is caused by Jensen inequality, and a stability criterion is proposed by reciprocally convex method. Furthermore, a state feedback controller is designed to synchronize the master-slave systems based on the proposed criteria through cone complementary linearization approach. Finally, a simulation for Lorenz chaos time delay system is given to prove the validity based on the proposed synchronization control approach.
Introduction
In recent years, a lot of scholars have devoted themselves to the study of nonlinear systems, for example, Fuzzy Control,1–3 anti-windup control, 4 adaptive robust control, 5 backstepping control, 6 and state feedback control 7 . The nonlinearity also exists in the chaotic system. Time delay generally exists in physical and biological experiments, which is a significant factor for instability in engineering systems.8–9 As we all know, only the stable system has realistic significance. Time delay is still a focus in chaotic systems because it may lead to instability.10–12 To the best of our knowledge, the stability is vital to evaluate the performance of the system, and there exist lots of methods, such as input-to-state stability, 13 chaos synchronization method using the non-generating partitions, 14 network systems, 15 and robust stability for uncertain system. 16 Because of the limitation of the system itself and the existence of time delay, it is difficult to achieve synchronization without external intervention. According to this, more and more studies are devoted to the chaotic synchronization with time delay and have obtained an enormous achievement.14,17 It plays an increasingly important part in stability. As we all know, Lyapunov–Krasovskii functional (LKF) theory is considered the most popular tool for stability problem of time-varying delay system. But conservation is inevitable when processing synchronization error via LKF. The less conservative not only depends on the choice of the LKFs but also relies on the method of how to deal with the integral term. Compared to the time-independent, the delay-dependent stability methodology is less conservative. In order to overcome the conservation and get efficient results, it has been tackled in the previous literatures in a number of different ways, constructing new LKFs, 11 Newton–Leibniz formula, 18 free weighting matrices, 19 convex combination method,20,21 and model transformation. 22 For the aforementioned techniques, Jensen inequality is generally regarded as a powerful tool to get less conservatism. But the inherent conservatism of the Jensen inequality is difficult to conquer because of ignoring too much value. From the discussion above, Seuret and Gouaisbaut 23 propose Wirtinger inequality which regards Jensen inequality as a special case. Le and Hieu 24 propose a new refined Jensen-based inequalities including Jensen- and Wirtinger-based integral inequalities. The inequality can more precisely indicate integral terms. Nevertheless, in the previous researches, the refined Jensen-based integral inequality is rarely applied to the nonlinear chaotic system with time-varying delay. In this article, a less conservatism synchronization method is explored for the nonlinear chaos system with time-varying delay. For the sake of less conservatism, we use the refined Jensen-based inequality to handle stability problem. State vector contains single and double integral terms based on the proposed inequality. An LKF is proposed to make the closed-loop synchronization error close to zero, containing triple-integral term. In addition, a state feedback controller method is derived to stabilize the nonlinear system under time-varying delay. This article is arranged as follows: system description and preparations are described in section “Preliminaries.” In section “State feedback controller design,” the stability criterion of the chaos synchronization system is formulated. An example of Lorenz chaotic system is given in section “Example.” Section “Conclusion” summarizes the article.
The Euclidean norm for a vector z is shown by
Preliminaries
Consider a time-varying delayed master-slave systems as


where

where L1, L2 are constant matrices. In order to reduce conservatism, the improved Wirtinger inequality will be used to deduce our theorems, as follows.
Lemma 1
For a given matrix


in which

Lemma 2
Support symmetric positive definite matrices

then the inequality holds,

State feedback controller design
Define synchronization error for the master–slave system as

In the interest of implementing synchronization between master and slave system, we design a state feedback controller as follows

in which K is a controller gain matrix with appropriate dimensions. Substituting equation (7) into equation (6), we obtain

in which
Theorem 1
For given value of K and scalars


where

Proof
The LKF is defined as follows

Time derivative of

Using Lemma 1, we obtain


in which

For
Taking Lemmas 1 and 2, we obtain

From equation (3), it is obvious that

Using equations (13)–(16) into equation (12), we obtain
where
The system is stable if it satisfies
In Theorem 1, we assume controller gain K is known. Now we consider an unknown controller gain matrix K. Based on Theorem 1, the following theorem can be obtained.
Theorem 2
Synchronization error system (8) is asymptotically stable, if it satisfies equation (3) under


where
Proof
According to congruence transform, using

where
Further applying Schur complement to equation (20), we can obtain equation (19).
Theorem 3
Synchronization error system (8) is asymptotically stable, if it satisfies equation (3) under disturbance


where

It is
Proof
Time derivative of

where
Note that
Remark 1
Obviously, it is hard to solve the proper controller parameter because the form of the LMI is not standard. Thus, we can use the variable substitution method to solve inequalities by convex optimization algorithms. Defining

With subject to equation (19), we obtain

Example
Considering system (8) under no disturbance with

and satisfying the initial conditions, we obtain

Figure 1 shows the master and slave chaos time delay system and the synchronization error plots, without any control signal, demonstrating the non-synchronization behavior. In order to synchronize systems (1) and (2) with controller (7), the state feedback controller according to Remark 1, using MATLAB’s LMI toolbox, is designed under

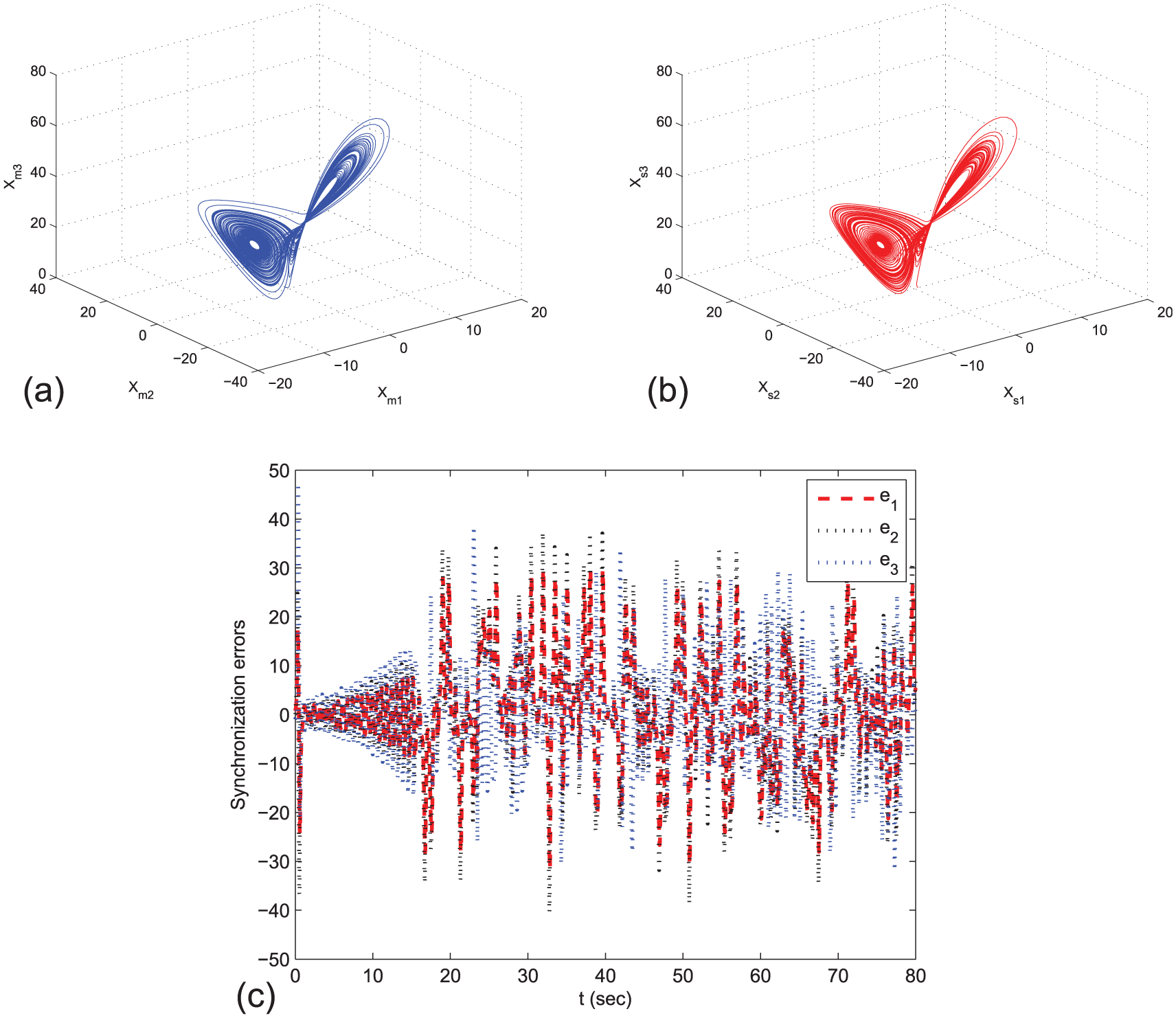
With no disturbance, (a) indicates the master system, (b) indicates the slave system, and (c) synchronization error between the master and the slave systems.
The controller is obtained as

which ensures the synchronization between master and slave systems.
On account of the proposed feedback control method, the master–slave time delay systems are synchronized as shown in Figure 2. In Figure 2, the error converges to zero. Furthermore, Figure 3 exhibits the control input signal. All above, we discussed no disturbance; Figure 4 shows the synchronization error with disturbance

With control input signal: (a) indicates the master system, (b) indicates the slave system, and (c) synchronization error between the master and the slave systems.

Control input signal.

Synchronization error between the master and the slave systems with disturbance
Conclusion
The problem of chaos synchronization for time-varying delay has been explored based on improved Wirtinger’s inequality. A state feedback controller has been derived to ensure synchronization for the master and slave systems. Simulation result has been given to prove the good effectiveness of the proposed stability criterion. State feedback controller as well as the adaptive control is a common control theory for chaos synchronization method.29,30 In the industrial control, adaptive control has been used to resolve the practical matter.31–33 In the future, based on the state feedback controller, we will apply the adaptive control to chaos synchronization. In addition, we will use refined Jensen-based inequality to adaptive control.
Footnotes
Acknowledgements
The authors gratefully acknowledge the anonymous reviewers for their valuable comments.
Academic Editor: Nasim Ullah
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is partially supported by the National Natural Science Foundation of China under grant Nos 61503280, 61403278, 61402329 and Major Projects for Science and Technology of Tianjin (No. 15ZXHLGX00300).