
Abstract
To assemble a heavy payload to the spacecraft (free-floating base), the present study proposes a scheme of multiobjective trajectory planning for preimpact motion of redundant space manipulator (mounted on the base). Force impulse for self-assembly is derived as the function of joint angles/velocities, base pose, and impact direction. The trajectory planning problem is formulated as multiobjective optimization to minimize force impulse, base attitude disturbance, and energy consumption in the load-carrying process. A two-stage trajectory planning algorithm is proposed. To be specific, at the first stage, multiple desired configurations at the contact point are generated by position-level inverse kinematics with Newton–Raphson iterative method. At the second stage, joint trajectories satisfying joint angle limits and desired motion of the payload are parameterized by coefficients of sinusoidal polynomial functions. Multiobjective particle swarm optimization algorithm is adopted to solve the problem of multiobjective trajectory planning, and screening process is conducted to reserve nondominated solutions in limits of joint torques. The algorithm is implemented to a seven degrees of freedom space manipulator, and the effectiveness of the proposed method is verified by simulation results.
Keywords
Introduction
Space manipulators are increasingly critical to future on-orbit servicing, 1 especially to capture, assemble, and maintain large-space structures. 2 After capturing a heavy payload, the space manipulator mounted on the spacecraft base is employed to assemble payload to the base. In the preassembly operation, space manipulator should carry the payload from capture pose (including position and orientation) to preassembly pose. However, for the dynamic coupling effect between space manipulator and spacecraft, 3 attitude disturbance of the base induced by heavy payload should be considered in the motion planning process. Existing studies considering payload constraints were conducted for ground manipulators. 4 –6 For on-orbit load-carrying operation, a multiobjective optimization-based approach was proposed to achieve the maximum-payload trajectory planning of free-floating space manipulator (FFSM). 7 Dalla and Pathak proposed a method for multiple space manipulators to perform a docking task in the control of base disturbance. 8 However, impact problem has not been considered in the mentioned studies.
For space manipulators, the effect exerted by impact force should be analyzed. Yoshida et al. divided the capture mission into three phases and proposed extended generalized inertia tensor to formulate collision dynamics. 9 Chen et al. explored the impact dynamics and the motion after impact. 10 Huang et al. derived the force and momenta transmission from the end-effector to the base under impact between the end-effector and the target. 11,12 For the trajectory planning problem involving impact force influence, Wee et al. developed a joint space planning strategy that achieves both trajectory tracking and impact minimization. 13 Zhang et al. investigated a desired configuration at the contact point; subsequently, they proposed a scheme of preimpact trajectory planning to achieve minimized base attitude disturbance caused by impact, 14 whereas the results were achieved by depending on a specified base pose. In the present study, base disturbance in preimpact motion is not considered, which cannot be neglected when carrying a heavy payload. Cong and Zhang analyzed a dual-arm space manipulator and proposed the “straight arm capture” concept, which is not suitable for self-assembly. 15 However, the mentioned studies were conducted for capture tasks, in which impact influences on space manipulator were exerted by an external force, and impact force displayed the only relationship to the configuration of the manipulator. For impact process of self-assembly, the collision between the base and the payload should be considered as internal force. Base suffers directly impact the assembly mechanism and the disturbance force transmitted from payload to the base.
When carrying a heavy payload, the force impulse can be extremely large, which may damage payload, spacecraft, and manipulator. Large disturbance to the base may take place for the nonholonomic characteristics, 16 which is not expected since the requirements of communication and observation. Moreover, for large mass and inertia tensor of payload, energy consumption involved in load-carrying operation can significantly increase. Given task constraints and limited capacity of space manipulator, multiple objectives and constraints should be considered. Misra and Bai and Luo et al. adopted quadratic programming method to optimize base disturbance and avoid collision. 17,18 Similar method was employed for local optimization of reaction torque and joint torque simultaneously. 19 The task-priority-based null-space trajectory planning problems were studied for redundant space manipulator. 20 –22 Moreover, evolutionary algorithms were adopted to perform optimization, such as multiswarm particle swarm optimization (PSO), 16 differential evolution algorithm, 23 and genetic algorithm. 24 In the mentioned studies, trajectory planning was altered to a single-objective problem, and weighting coefficient exists in cost functions to determine the weight of each objective. Wang et al. explored the application of PSO to trajectory planning and discussed nondominated solutions. 25 The Pareto Front was obtained by mapping the solutions of single-objective optimization to objective space, multiobjective evolutionary computation and dominance relations were uninvolved. Multiobjective optimization was introduced for mobile and industrial manipulators, 26,27 which also applies to trajectory planning of space manipulator.
In the present study, a scheme of multiobjective preimpact trajectory planning is proposed for self-assembly task of space manipulator when carrying a heavy payload. The rest of this study is organized as follows: The second section analyzes the force impulse for self-assembly task. In the third section, how to formulate trajectory planning as a multiobjective constrained optimization problem is discussed. The fourth section illustrates the two-stage algorithm that combines of solving multiple configurations and multiobjective evolutionary computation. The fifth section presents the simulation results of a seven degrees of freedom (7-DOF) space manipulator. The conclusions of the work are presented in the sixth section.
Modeling of free-floating space manipulator for self-assembling a heavy payload
Mathematical model of space manipulator with a payload
Figure 1 shows the general model of a free-floating space manipulator that consists of a base, a
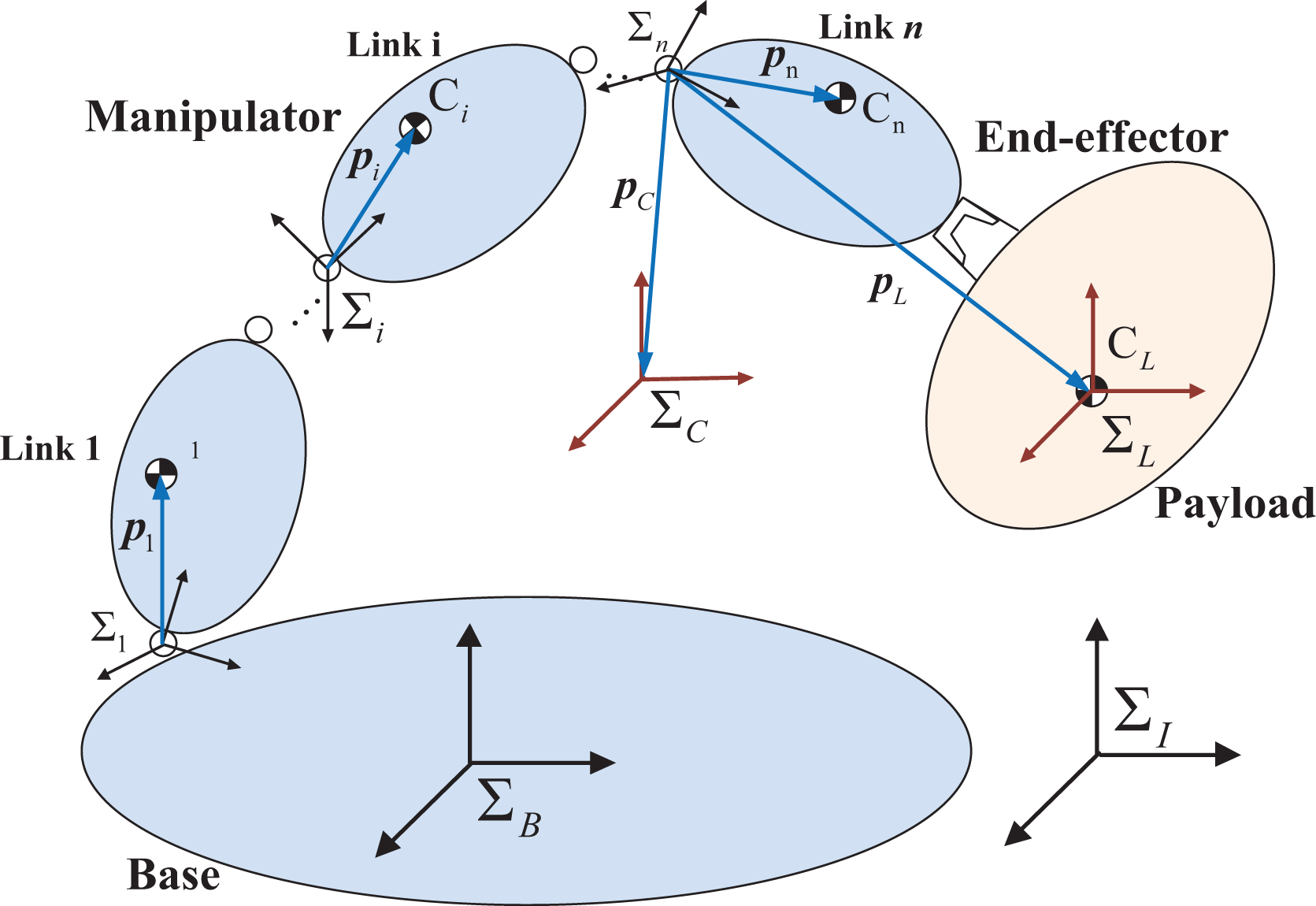
Simplified model of free-floating space manipulator.
Symbols applied in modeling of FFSM.
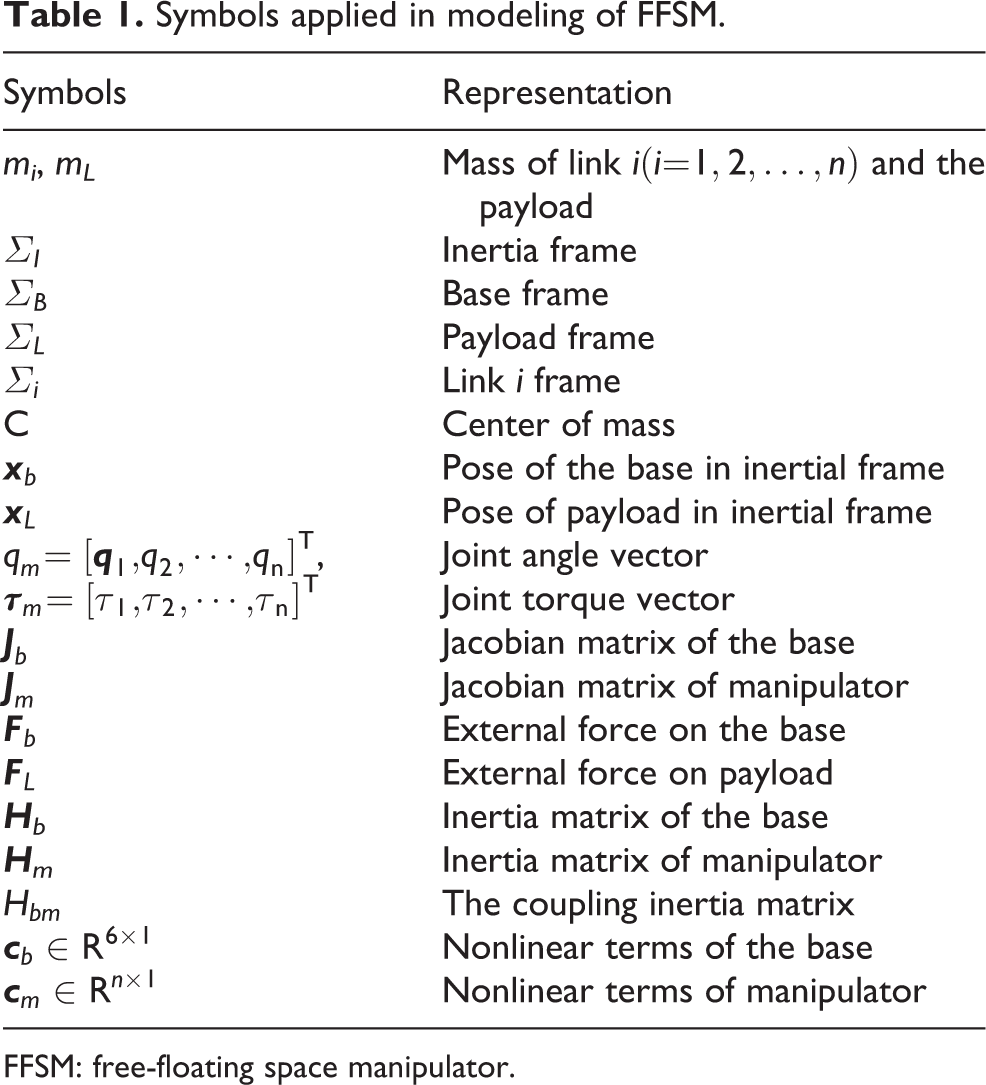
FFSM: free-floating space manipulator.
The payload is attached to the end-effector with rigid connection; thus, link 1 and payload can be considered a single composite rigid body. Mass and inertia tensor of the composite body can be expressed as

where mc
denotes the mass of the combined body;
Next, the dynamics equation of space manipulator can be formulated as

where the inertia and Jacobian matrixes are calculated considering payload parameters by equation (1).
Under the free-floating condition, the total momentum of the system is conserved, as expressed by

The initial momentum is assumed as

where
Substitute equation (4) to the following general kinematics equation of FFSM

where
Force impulse analysis for self-assembly
At the contact point, the following collision assumptions are made to develop the force impulse function:
14
The interaction duration is significantly short, so the contact force acts instantaneously. The pose changes of payload in the impact process are negligible, and the effects of other forces except for the contact force can be ignored. Based on the mentioned assumptions, the inertia term of dynamic equation is dominant and other terms are disregarded. Impulsive forces and moments are induced on an act–react principle at the single-point of contact.
Next, equation (2) can be reformulated as


The matrixes in equation (7) are listed as follows

When ignoring centrifugal force and Coriolis force, the inertia term of dynamics equation is dominant. Equation (7) can be simplified as

Define

At the contact point, the contact force acts payload and base are assumed as

The integral formula above is taken in a very short time

So that

where
The integral of equation (5) in

Define

According to equation (4), the motion of the base is calculated by

Substituting equation (14) into the integral of equation (16), it easily yields

Define
The collision consists of the stages of compression and rebound. At the end of the compression stage, the relative velocity of contact surface between the base and the payload is zero, which is expressed as

Substituting equations (15) to (17) into equation (18), the force impulse in the self-assembly process is defined as

Since the relative motion of the base and the payload is attributed to the joint rotation, the given relative velocity of self-assemble task can be described as

where
Take Poisson model in collision and set the restitution coefficient as e, the total impulse is considered as

We can establish the force impulse function as

where
Multiobjective optimization problem for trajectory planning
The purpose of this study is to obtain appropriate joint trajectories, which accomplish self-assembly operation of a heavy payload and maintain stability of the whole system. Hence, trajectory planning problem exhibits the following characteristics: While the payload pose reaches the contact point, the relative motion of payload and base should satisfy the assembly requirements. Impulse force should be minimized to avoid damaging any part of the multibody system. Due to load-carrying capacity constraint of space manipulator, disturbance of the base, driving torque constraints of the joints, and total energy of the system should be considered.
7
Multiobjective optimization problem statement of preimpact trajectory planning
Given the mentioned analysis, preimpact trajectory planning of FFSM can be solved as a constrained multiobjective optimization problem (MOP) as follows

where
The initial constraints of space manipulator are defined as
where t
0 represents the initial time and
The final constraints at the contact point are written as
where
Joint angle constraints for

where
Joint torque constraints are

where
Definition of cost functions
To maintain stability of the space manipulator system, force impact, attitude disturbance of the base, and total energy involved in preimpact motion should be simultaneously minimized. Thus, the following three cost functions are established.
1. Force impulse
According to equation (22), force impulse is affected by the motion of space manipulator. To ensure the safety of the system under self-assembly collision, the cost function below is considered

2. Attitude disturbance of the base
Attitude disturbance of the base should be limited as impacted by the requirements of communication and observation. 23 When carrying a heavy payload, the range of base movement could be extended; accordingly, more fuel consumption can be achieved for the maintenance of its attitude. The objective function to minimize base disturbance is given by

where
3. Energy of the whole system
For the considerable mass and inertia tensor of the payload, the total energy involved in the motion may significantly increase. It is noteworthy that given the confliction between multiple objectives in solving MOP, energy may increase as well when f 1 or f 2 is optimized. Thus, the energy minimizing cost function is defined as

Parameterization of joint trajectories
To obtain smooth and continuous trajectories of joint angles, velocities, and accelerations, sinusoidal polynomial function is adopted to parameterize joint trajectories in the present study.
The trajectories are defined as

where
For a given self-assembly task, the values of

where

In the base frame, any position-level inverse kinematics method is adopted to obtain

where the symbols are calculated as follows

Given
Preimpact trajectory planning of free-floating space manipulator using multiobjective particle swarm optimization
Brief review of multiobjective particle swarm optimization
Multiobjective particle swarm optimization (MOPSO) algorithm refers to an evolutionary technology based on swarm intelligence that simulates social behavior. Given the advantages of fast convergence, less computing resource occupancy, and excellent diversity, MOPSO algorithm is adopted to solve the trajectory optimization problem.
Pareto dominance is incorporated into a conventional single-objective PSO algorithm to process the problems with several cost functions in MOPSO. 28 This algorithm employs an external repository of particles as guidance to lead the evolution of the population toward the Pareto Front.
In accordance with the multiobjective optimization theory, when the following Pareto dominance principle is satisfied,

The solution satisfying equation (36) is called a nondominated solution. Therefore, different from PSO, in the velocity formula of particle’s flight, the best position that all the particles ever had (

where
Figure 2 simply depicts the steps of MOPSO algorithm.

Flowchart of MOPSO. MOPSO: multiobjective particle swarm optimization.
Trajectory planning algorithm
Equation (22) indicates that the final configuration of space manipulator is capable of affecting the force impulse. Moreover, joint trajectories can vary significantly with different final states of the manipulator, which affects base disturbance and energy consumption. For a redundant space manipulator, multiple configurations should be considered in the trajectory planning process when payload reaches the contact point. 29
In the present study, Newton–Raphson iterative method
30
is employed to compute
Stage I: Obtain a set of desired configurations with Newton–Raphson iteration.

where

where
According to equation (33), joint differential motion vector is calculated as

Figure 3 shows the Newton–Raphson iteration. Execute iterative computation until the maximum iteration N is reached, corresponding desire preimpact configuration for the given joint vector can be obtained if

Flowchart of Newton–Raphson iteration.
A set of random joint vectors
Generate a population containing np
particles and restrict the search range as A random decision vector If equation (27) is satisfied, If the number of stored decision vectors reaches np
, define initial velocities of all the particles as zero.
The maximum allowable number of the repository is limited to nR
. Substitute kinematics and dynamics calculation results of the respective particle into equations (28)
to (30) to determine the objective vector of particle k: Store nondominated decision vector in R
0 according to equation (36). Initialize the best position particle k has experienced as
Calculate particles’ velocity using equation (37) and update the position of the respective particle. According to dynamics calculation results, only new solutions that satisfy joint torque constraints are reserved in each iteration. Add these reserved solutions into the repository via a similar solution procedure in (b) and (c) of step 2, nondominated solutions can be acquired to guide the evolutionary process of the population. The set of nondominated solutions is finally yielded, while the maximum number of iteration is reached. An appropriate solution can be taken based on the meanings of the particle’s position in objective space, according to the task priority or practical engineering requirements.
Simulation results
Seven degrees of freedom space manipulator
As shown in Figure 4, a 7DOF redundant space manipulator is studied in the present study. D-H coordinate system is established, and the relevant parameters are listed in Table 2. Table 3 lists the dynamics parameters, in which only the elements of diagonal matrixes are given:

D-H coordinate system of the manipulator.
D-H parameters.

Dynamics parameters.

Results and discussions
The pose of the base at initial time is zero in inertia frame; the initial joint angles are set to
At stage I of the simulation, the relevant parameters in Newton–Raphson iteration are set to
The optimal values of three cost functions in each generation are shown in Figures 6
to 8, demonstrating high convergence effects. The number of particles in external repository is elevated, as shown in Figure 9. nR
is reached at 115th iteration and the subsequent fluctuation of the curve indicates the maintenance of repository. The extreme values of cost functions are listed in Table 4,

Pareto Front of three objective functions.
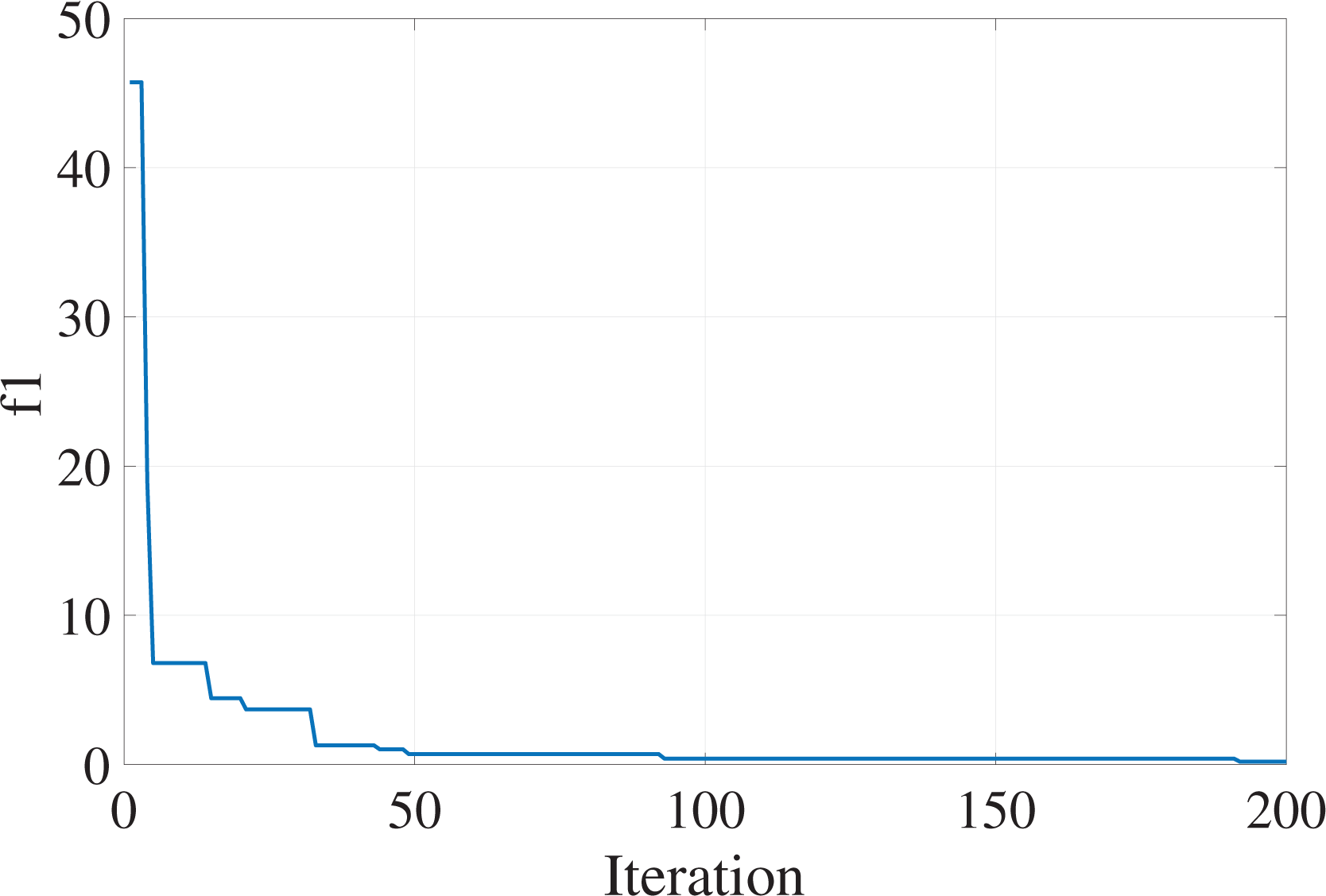
Change of optimal value for f 1.
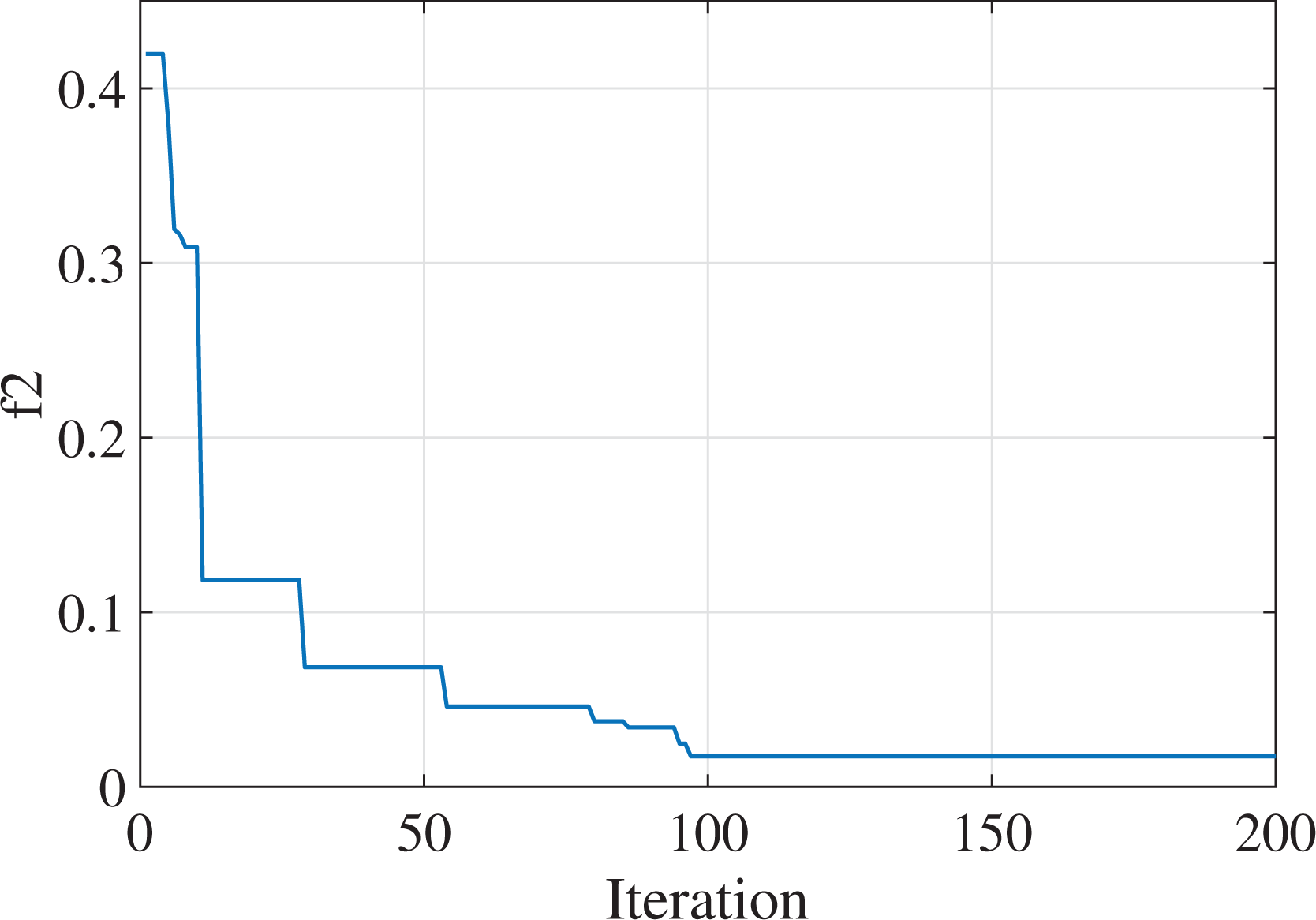
Change of optimal value for f 2.

Change of optimal value for f 3.

Number of particles in repository.

Pareto Front of f 1 and f 2.
Extreme conditions of final repository in objective space.

The bold values are used to highlight the positions of the maximum and minimum values.
Figure 11 depicts the joint trajectories, and the manipulator moves in the limits of joint angles. The desired joint angles listed in Table 5 are reached for each solution, demonstrating that the self-assembly pose of payload is satisfied at the impact time. Figure 12 shows the velocity of the payload in base frame for both solutions, and the desired assembly velocity

Joint trajectories for solutions A and B: (a) Solution A and (b) solution B.

Payload velocity changes in base frame: (a) Linear velocity (solution A), (b) linear velocity (solution B,) (c) angular velocity (solution A), and (d) angular velocity (solution B).
Relevant vectors of solutions A and B.

Figure 13 shows the variations of base attitude (represented by Z-Y-X Euler angles). Given the kinematics calculation, the final pose of the base in inertia frame is

Base attitude changes in inertial frame for solutions A and B: (a) Solution A and (b) solution B.
Conclusion
Given the significance of on-orbit assembling a heavy payload to free-floating base with a space manipulator, the present study proposes a scheme of multiobjective preimpact trajectory planning. The force impulse in the self-assembly process is formulated as a function of joint angles, joint velocities, base pose, and collision direction. As revealed from such function, force impulse is determined by the current state of the system at the contact point as well as the history motion of the space manipulator. The joint trajectories are built by coefficients of sinusoidal polynomial functions. Inverse kinematics is adopted to transmit constraints, so pose and velocity requirements for self-assembly are satisfied. Based on redundancy of space manipulator, multiple configurations are obtained as the input conditions for trajectory planning. The trajectory planning algorithm based on MOPSO minimizes force impulse, base disturbance, and energy cost simultaneously. Only solutions that satisfy joint torque constraints are reserved for both initialization and evolution. Each of the yielded nondominated solutions is of explicit physical significance in objective space, which provides convenience to pick out an appropriate solution.
The proposed trajectory planning method is capable of generating multiple, feasible, and effective preimpact motion schemes of space manipulator for selection. Accordingly, the on-orbit self-assembly of heavy payload and the spacecraft base is endowed with promising engineering application prospect. However, only preimpact process is considered in this study. Disturbance of the base and impact of the joint may cause discontinuous and instable motion of space manipulator system after assembly collision, which is to be studied in our future works.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Nature Science Foundation of China [No. 51605129], National Nature Science Foundation of China [No. 51704092], and Hefei University of Technology Xuancheng Campus Doctoral Production-Study Research Fund [No. XC2016JZBZ05].