
Abstract
Position–velocity–time control mode has been wildly used in industrial application. And velocity planning is one of the most important factors to determine the performance of position–velocity–time motion. To generate smooth trajectory while satisfying the kinematic constraints of the devices such as the maximum velocity, acceleration, and jerk, a novel velocity planning method is proposed. Firstly, a modified S-shaped acceleration/deceleration algorithm is designed to restrict the kinematic parameters. Meanwhile, a series of rules are specified to constrain the velocity profile to simplify the velocity planning process. On this basis, the velocity planning method is proposed based on the modified acceleration/deceleration algorithm. For reasonable position–velocity–time command, the given position–velocity–time conditions can be satisfied with smooth velocity profile, where the kinematic parameters can be limited in their allowable ranges. For unreasonable position–velocity–time commands, a series of planning strategies are designed to adjust the given conditions according to the user needs, which is suitable for the real application. The comparative experiments show that the proposed method can realize the velocity planning for position–velocity–time motion with smooth trajectory while restricting the kinematic parameters. The computational load is also tested to satisfy the real-time requirement. Therefore, the proposed velocity planning method has good performance and strong practicability.
Keywords
Introduction
Position–velocity–time (PVT) control mode, where the motion axes can get to the specified position with desired velocity and time, has been wildly used in motion control. 1,2 In that mode, the controller conducts the velocity planning according to a series of points with PVT information which are called PVT commands. Compared with the position–velocity (PV) and position–time (PT) control modes, PVT mode has a stronger constraint on motion process. However, in some application situations, the PVT commands are send by the host computer with a certain beat rather than obtained by velocity look ahead. Hence, the given conditions might not match to the kinematic constraints of the devices such as the maximum velocity, acceleration, and jerk, which affects the motion smoothness and might cause damage to the drive and transmission components. Therefore, it is critical to develop an appropriate velocity planning method to guarantee the motion smoothness while restricting the motion parameters.
The most common used velocity planning methods for PVT control are cubic and quintic polynomial interpolation algorithms. 2 –7 Each PVT command is used as the planning interval to construct the trajectory by cubic or quintic polynomial functions. And the conditions of PVT command at the end of command interval can always be satisfied. Meanwhile, polynomial interpolation algorithms is easy to conduct with small computational load.
However, the acceleration profiles obtained by the cubic polynomial method are discontinuous at the edges of each interval. Meanwhile, the Runge phenomenon 8 is obvious with the fifth-order polynomial function in some situations, which causes serious oscillations. Moreover, the velocity, acceleration, and jerk profiles in each interval obtained by polynomial methods are uncontrollable and might exceed the kinematic constraints, which might cause damage to devices and affect motion accuracy.
To restrict the motion parameters, various acceleration/deceleration (ACC/DEC) algorithms can be used. Some jerk-limited ACC/DEC algorithms such as the S-shaped method 9 –11 and the dynamic jerk constraint method 12 have been employed to generate continuous acceleration profile. To simplify the expression and calculation process of polynomial methods, some trigonometric ACC/DEC algorithms are developed such as the Sine-curve methods. 13,14 However, the motion efficiency is limited because the maximum velocity, acceleration, or jerk cannot be maintained in these trigonometric methods. 15 To further improve the motion smoothness, some jerk-continuous ACC/DEC algorithms 16 –19 are proposed. However, their expressions and the computation process of velocity planning are complicated.
Among these algorithms, the S-shaped ACC/DEC has continuous acceleration and limited jerk 20,21 which is necessary and sufficient for smooth trajectory. Meanwhile, the specified rules with seven sections have strong constraint ability on kinematic parameters. 22,23 In addition, the calculation process of velocity planning is simple and standard. 24 However, the typical S-shaped ACC/DEC algorithm and the corresponding velocity planning method cannot consider the motion time condition, which cannot be used to PVT application directly and needs to be modified.
To cope with these problems, a velocity planning method is proposed in this paper for PVT control. The main contributions can be described as follows: A modified S-shaped ACC/DEC algorithm is designed based on the typical algorithm, which can consider the time condition and maintain the properties in terms of smoothness, simplicity, and ability to constrain the kinematic parameters. On this basis, a series of rules are specified to restrict the form of velocity profile to simplify the velocity planning process. The velocity planning method is proposed base on the modified ACC/DEC algorithm. By the proposed method, smooth trajectory can be generated to satisfy the given PVT conditions while the kinematic parameters are restricted within their given ranges, which is suitable for the real application.
The remainder of this article is organized as follows. In the second section, the typical S-shaped ACC/DEC algorithm and its modification are illustrated. The third section describes the velocity planning method for PVT control based on the modified S-shaped ACC/DEC algorithm. Experiment results are analyzed and compared with previous works in the fourth section. The conclusion and future works are given in the fifth section.
Typical S-shaped ACC/DEC profile and its modification for PVT control
The typical S-shaped ACC/DEC profile
As shown in Figure 1, the typical S-shaped ACC/DEC profile consists of seven sections which compose three phases namely ACC, constant velocity (CV), and DEC phase with fixed order. The corresponding velocity planning process is to calculate the minimum motion time

The typical S-shaped ACC/DEC profile with seven sections.
The modified S-shaped ACC/DEC profile for PVT control
To satisfy the requirements of PVT control, the typical S-shaped ACC/DEC algorithm needs to be modified to consider the motion time condition while maintaining its properties in smoothness, simplicity, and ability to constrain the motion parameters within The ACC, CV, and DEC phases can be combined in any order but each phase appears no more than once. The jerk of each section in ACC and DEC phases no longer equals to fixed values and depends on velocity planning with the given conditions. But the symmetry of jerk profiles in ACC or DEC phase is still maintained.
Based on these principles, the typical S-shaped ACC/DEC profile can be converted to different forms with same motion condition set

Some of possible velocity profiles and their displacements with same conditions.
However, there are too many kinds of profile forms in P2 profile is composed of ACC and CV phases and P3 profile only have ACC phase and the corresponding time is equal to T. P4 profile consists of the CV and ACC phases and
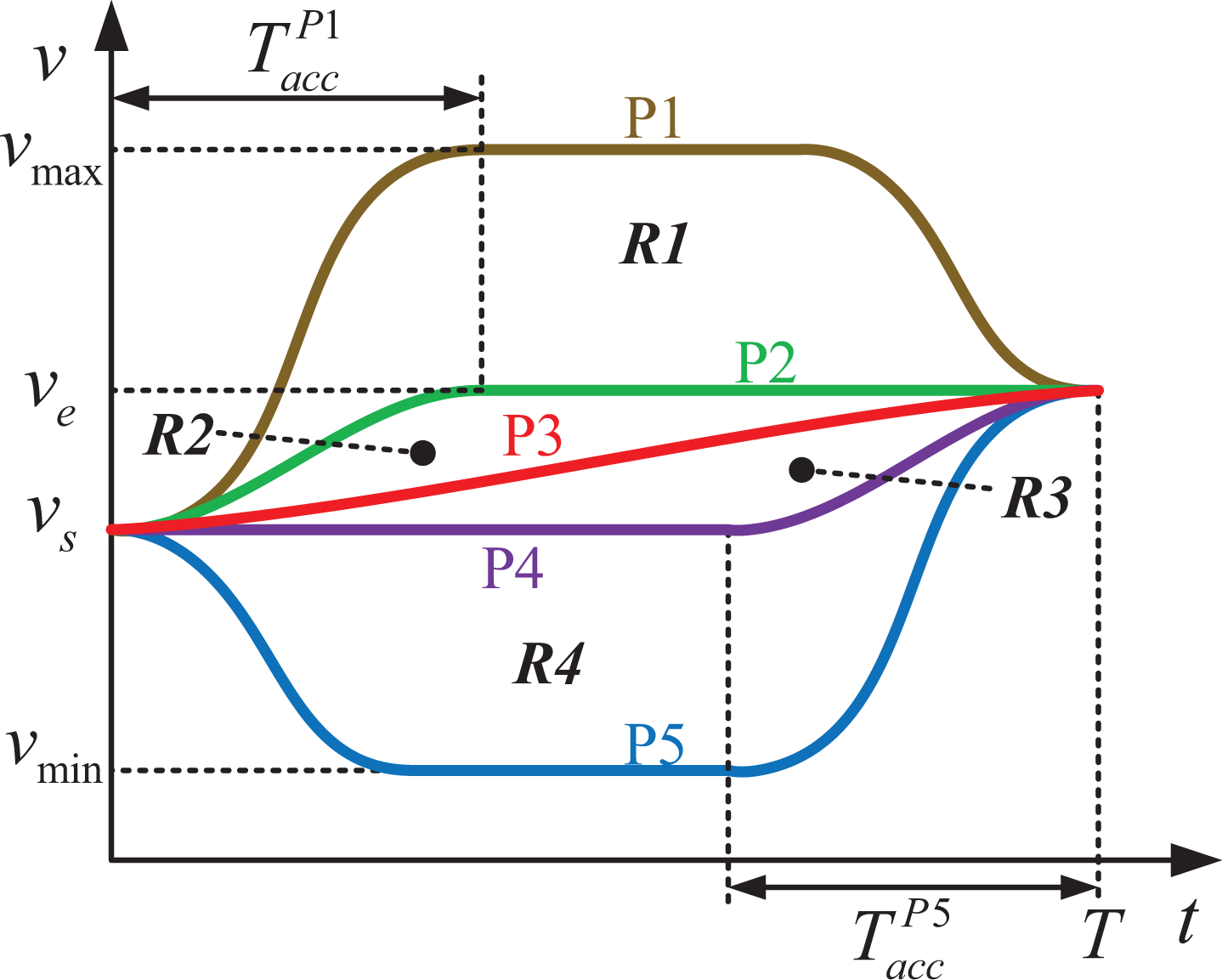
Five special profiles and four regions.
With these five profiles,
Rules of phase components, orders, and time of each phase in each region.

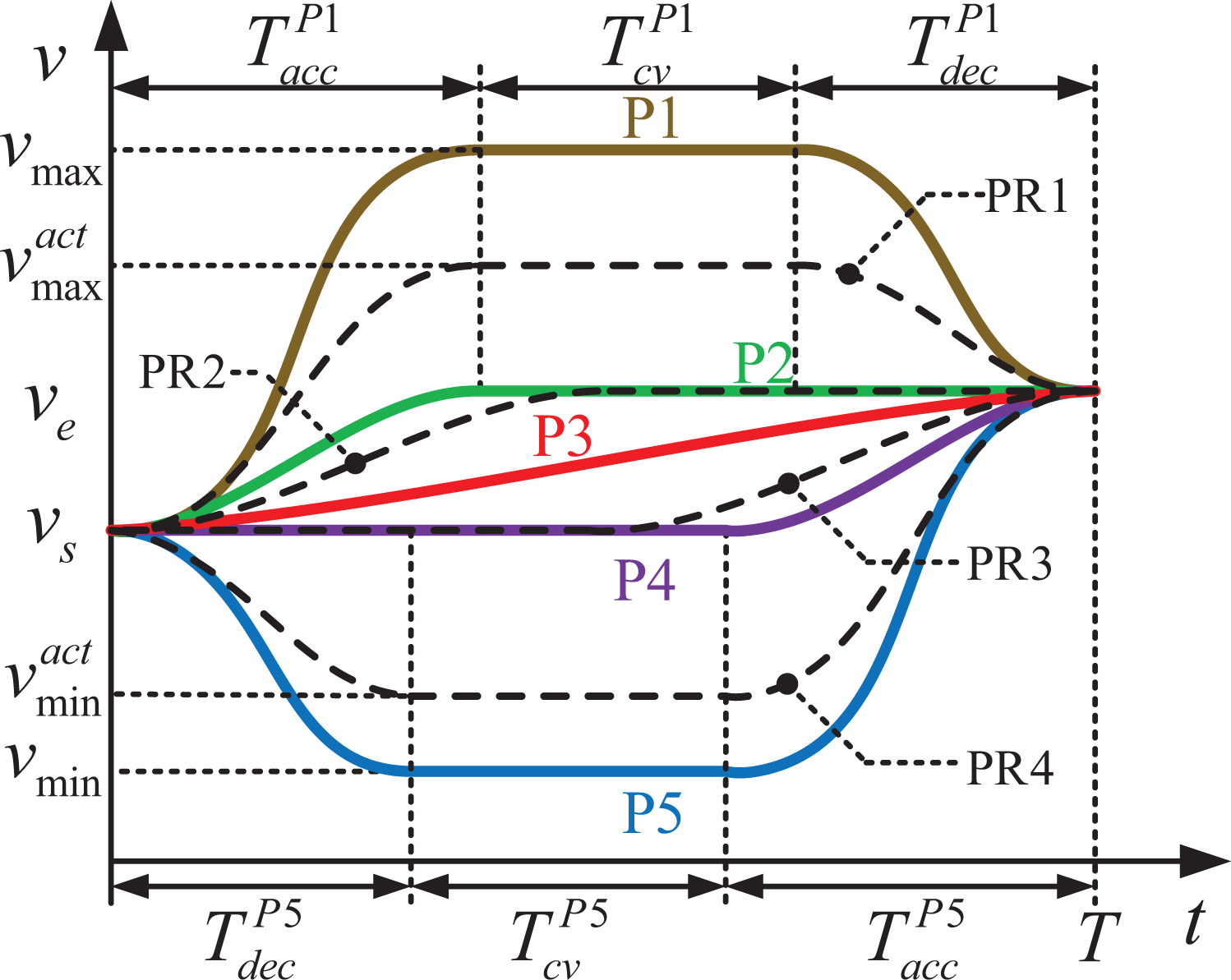
Example profile in each region.
Velocity planning method for PVT control based on the modified S-shaped ACC/DEC algorithm
Based on the modified S-shaped ACC/DEC algorithm, the velocity planning method is proposed to realize the PVT control. For the situations where the given conditions cannot be satisfied under the kinematic constraints, the corresponding processing procedures are also given. Based on Figure 4, the flowchart of velocity planning is depicted in Figure 5 and described in detail with eight steps as follows where assuming

Velocity planning method based on the modified S-shaped ACC/DEC algorithm.
(1) Step 1: judging the rationality of the given conditions preliminarily.
The given time T might be insufficient to accelerate vs
to ve
. Hence, the maximum reachable end velocity

After that, the following judgment should be performed:
if
if
(2) Step 2: calculating the maximum velocity
The calculation procedures of


Then, judge the relation between the given S and
if
if
if
(3) Step 3: calculating the displacements S 2, S 3, and S 4 of P2, P3, and P4 profiles shown in Figure 4.
Based on the specified rules given in subsection “The modified S -shaped ACC/DEC profile for PVT control,” S 2, S 3, and S 4 can be calculated as follows



Then, go to step 4.
(4) Step 4: velocity planning in different regions.
If
if
if
if
Sub-step 4.1: velocity planning in region R4
As the PR4 profile in Figure 6, the DEC, CV, and ACC phases all exist and the corresponding time is


Actual jerk and duration of each section in region R4.

As shown in Figure 6, the actual jerk and duration of each section in DEC phase can be calculated based on

The jerk and duration of each section in ACC phase can also be calculated by equation (9) similarly. Therefore, the velocity planning is finished.
Sub-step 4.2: Velocity planning in region R3
As the PR3 profile in Figure 4, only the CV and ACC phases exist. The time of CV phase

Then,



Finally, similar to Sub-step 4.1, the jerk and duration of each section in ACC phase can be calculated based on equation (9).
Sub-step 4.3: Velocity planning in region R2
As the PR2 profile in Figure 4, only the ACC and CV phases exist and the time of CV phase


Then, the time of ACC phase and other critical parameters can be calculated by equations (12) and (9).
Sub-step 4.4: Velocity planning in region R1
As the PR1 profile in Figure 4, the ACC, CV, and DEC phase are all existing and the corresponding time equals to

Then,

Similar to Sub-step 4.1, the time and jerk of each section in ACC and DEC phase can be calculated based on equation (9).
(5) Step 5: Adjusting ve to satisfy the time condition
In this situation, the given time T is too short that vs
cannot be accelerated to ve
. And the conditions of PVT control cannot be both satisfied. Therefore, to match the command beat, the conditions of end velocity and displacement should be abandoned. The end velocity ve
should be replaced by

Then, the jerk and time of each section can be obtained with the same procedures in step 4.
(6) Step 6: Abandoning the displacement condition
When coming to this step, it means the displacement condition cannot be satisfied with
(7) Step 7: Increasing the end velocity
Based on the maximum reachable end velocity


Then,
if
else,

Then, the time and jerk of each section in ACC phase can be calculated similar to sub-step 4.3.
8. Step 8: Reducing the end velocity
With the conditions of vs
, T, and

Based on


If
If

Then, the time and jerk of each section in DEC phase can be calculated and the velocity planning is finished.
For steps 5–8, the PVT conditions cannot be both satisfied. When coming to the next command period, the target displacement
Implementation and experimental results
In this section, the experiments are performed to evaluate the good performance of the proposed velocity planning method. Analysis and comparisons are also performed with some other representative methods such as the cubic and quintic polynomial interpolation algorithms.
Experimental setup
The experiments are conducted on a two-axis motion platform with Panasonic MBDH series servo derives and MHMD series motors. The layout of the experimental system is shown in Figure 7. The host computer generates PVT commands and sends them to the self-developed PC-based motion controller 10 through Ethernet where the command period is 50 ms. The PVT commands come from a tracking system guided by machine vision. The tracking target including PVT conditions is given by machine vision and the mechanical system completes tracking. The configurations of the motion controller are shown in Table 2. Meanwhile, the axis control data can be sent to the corresponding servo derives by EtherCAT and the interpolation period is set to 1 ms. In addition, kinematic constraint parameters are shown in Table 3. The two axes’ PVT commands are shown in Figure 8(a) to (d).

Layout of the experimental system.
Configurations of the motion controller.

Kinematic constraint parameters.


PVT commands of the two axes.
Experiment results and comparisons
The target of velocity planning for PVT control is to satisfy the position, velocity, and time conditions under the kinematic constraints. Therefore, we judge the performance of velocity planning methods through comparing whether the motion parameters can be restricted in their allowable regions while complete the PVT motion.
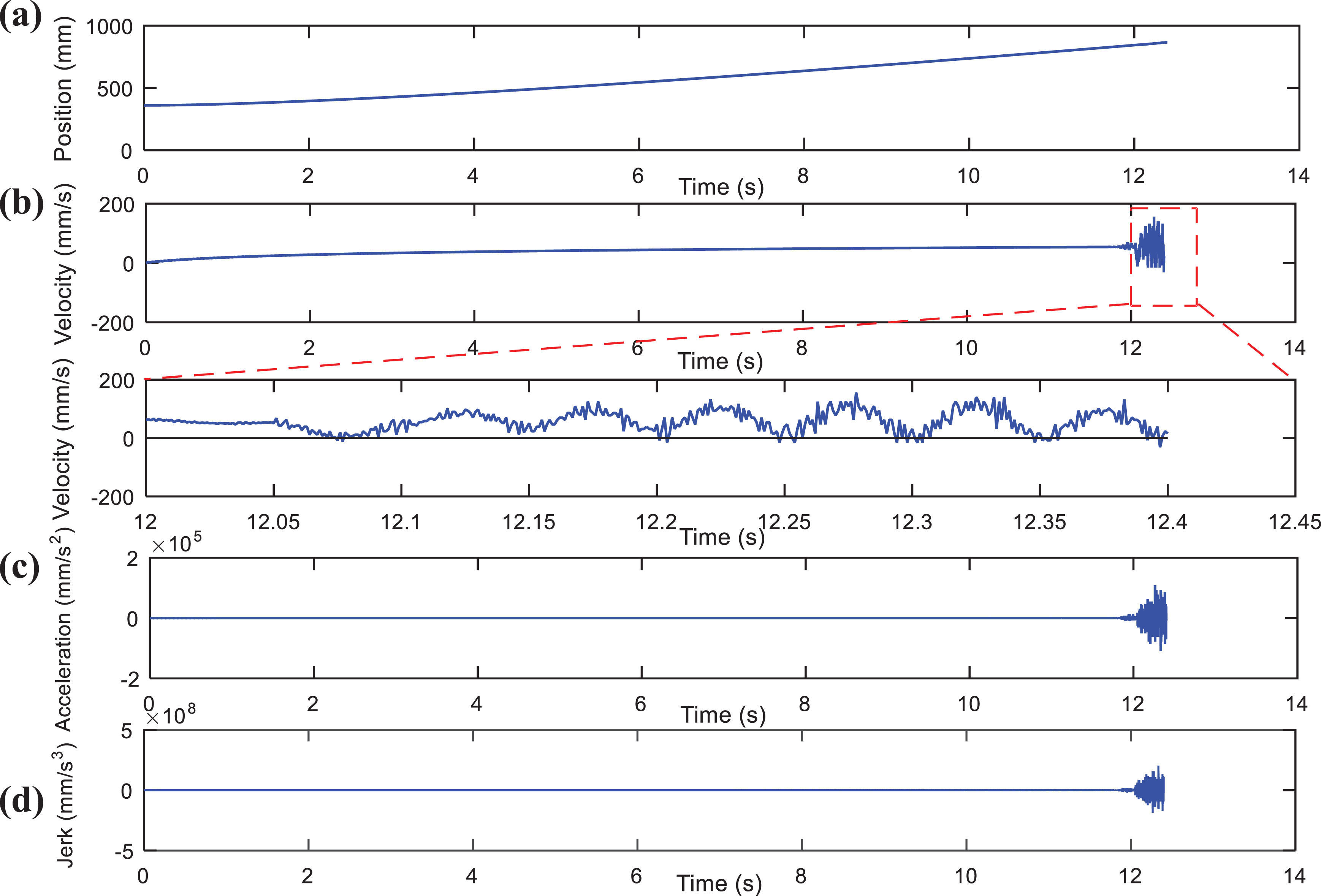
According to the PVT command sequences, the experiment results of the proposed velocity planning method are shown in Figures 9 and 10. As can be seen, smooth velocity and continuous acceleration profiles can be generated while all the motion parameters are restricted in their given ranges. For the commands which cannot be satisfied under the kinematic constraints, the given conditions are adjusted to match the constraints where the end velocity is set to a higher priority. In the last part, the given end velocity and position are not reached but there is no subsequent PVT command. Hence, the two axes are moved to the target position and end velocity directly based on the typical S-shaped ACC/DEC algorithm without considering the time condition.

Experiment results of X axis by the proposed velocity planning method. (a) Position; (b) velocity; (c) acceleration; (d) jerk.

Experiment results of Y axis by the proposed velocity planning method. (a) Position; (b) velocity; (c) acceleration; (d) jerk.
The experiment results obtained by the cubic and quintic polynomial interpolation methods are shown in Figures 11 and 12 and Figures 13 and 14, respectively. As shown in Figure 11(c) and 12(c), the acceleration profile obtained by the cubic polynomial method is discontinuous, which causes serious vibration and shock. Meanwhile, as can be seen form Figure 13(b) and 14(b), the velocity profile obtained by the quintic polynomial method has serious oscillations. Even in some interpolation periods, the velocity appears negative. In addition, the velocity, acceleration, and jerk obtained by the cubic and quintic polynomial methods are uncontrollable and exceed the kinematic constraints, which affects the motion smoothness and might cause damage to the drive and transmission components.

Experiment results of X axis by the cubic polynomial method. (a) Position; (b) velocity; (c) acceleration; (d) jerk.

Experiment results of Y axis by the cubic polynomial method. (a) Position; (b) velocity; (c) acceleration; (d) jerk.

Experiment results of X axis by the quintic polynomial method. (a) Position; (b) velocity; (c) acceleration; (d) jerk.
Experiment results of Y axis by the quintic polynomial method. (a) Position; (b) velocity; (c) acceleration; (d) jerk.
The real-time performance of the proposed velocity planning method is also tested during the experiments. The average and maximum computational time in each interpolation period are 1.562 μs and 10.523 μs, respectively, and much smaller than 1 ms. Therefore, the proposed method can always satisfy the real-time requirement with 1 ms interpolation period.
Conclusion and future works
In this article, a novel velocity planning method based on a modified S-shaped ACC/DEC algorithm is proposed for PVT control. For reasonable PVT commands, the given PVT conditions can be satisfied by this method with smooth velocity profile while the kinematic parameters can be limited in their allowable ranges. For unreasonable PVT commands, a series planning strategies are designed to adjust the given conditions according to the user needs, which is suitable for the real application. The comparative experiments have been conducted and validate the good performance and applicability of the proposed method.
For some devices, such as the serial industrial robots, their kinematic constraints are not fixed and vary with their position and posture. The proposed velocity planning method is only suitable for fixed constraints. Future work will focus on considering the variation characteristics of kinematic constraints during velocity planning to make full use of the motion performance of device. Therefore, the kinematic and dynamic models of devices need to be established to get accurate kinematic constraints.
Footnotes
Appendix 1: Calculation of v max and v min
Assuming
Based on the assuming of
The DEC time
if
else, it means that The flowchart of the calculation of 
(2) Step A2: assuming
Similar to Step A1, the ACC and DEC time
if
else if
else, it can be inferred that
(3) Step A3: assuming
Based on equation (A1), the ACC and DEC time
If
else if
else, it can be concluded that
The calculation procedures of The flowchart of the calculation of 
Acknowledgment
The authors would like to thank the supports from Natural Science Foundation of Shandong Province, Major Scientific and Technological Innovation Project of Shandong Province, and Major Projects of New and Old Kinetic Energy Conversion in Shandong Province.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by Natural Science Foundation of Shandong Province (Grant No. ZR2019QEE042), Major Scientific and Technological Innovation Project of Shandong Province (Grant Nos. 2019JZZY020121 and 2019JZZY010455), and Major Projects of New and Old Kinetic Energy Conversion in Shandong Province.