
Abstract
This article aims to establish the relationship between the position and cable tension influencing factors and the stability, and propose a method for quantitative stability sensitivity assessment for a cable-based coal–gangue picking robot. Firstly, a structural stability measure approach is proposed for the cable-based coal–gangue picking robot. Secondly, a stability sensitivity analysis model is developed to investigate the stability sensitivity on the selected influencing factors based on the grey relational degree, where the influencing degree of each factor on the stability for the cable-based coal–gangue picking robot is explored with grey relational analysis. At last, a numerical study is carried out to demonstrate the stability measure approach and stability sensitivity analysis model for the cable-based coal–gangue picking robot was scientific and reasonable, where the end-grab position set which the robot can meet the predetermined stability requirements is obtained. And meanwhile, the correlation of each influencing factor on the stability for the robot is calculated. And the stability sensitivity simulation results show that (1) the correlation of the seven influencing factors on the stability are, in a descending order, cable tension T 2 > cable tension T 4 > cable tension T 3 > cable tension T 1 > z-direction displacement of the end-grab > x-direction displacement > y-direction displacement; (2) among the influencing factors, the cable tensions have greater influence on the stability of coal–gangue picking robot, and it is followed by the z-direction displacement of the end-grab, while y-direction displacement is found to have the minimal influence. This article provides a guiding direction for robust design of the sorting trajectory planning and control of the coal–gangue picking robots.
Keywords
Introduction
Coals being an important energy source in China play a key role in the economic development. However, the raw coal, in the coal production process, is inevitably mixed with gangues, which has brought out serious environmental problems. Therefore, the separation of gangues and coals is pivotal to improve raw coal quality and realize clean utilization of the coals. 1 Up to now, the traditional manual sorting is used to complete the separation of gangues from coals, whereas robotic separation is developing stage all over the world. 2 In fact, it has been known that robotic separation of coals and gangues is the crucial link in the green mining and intelligent coal mine, and therefore, the research and development of coal–gangue sorting robots are imminent.
A cable-based parallel robot is a special class of parallel robot in which the rigid links are replaced by the flexible cables. 3 The main advantage of the cable-based parallel robots are their light weight, unrestricted length of the drive cable, flexibility, large workspace, and small inertia over their rigid-link counterparts. 4 Consequently, the cable-based parallel robot is exceptionally well suited in many industrial applications, such as wind tunnel experiments, 5 medical rehabilitation, 6 astronomical observation, 7 aerial panoramic photographing, 8 and 3D printing. 9 The cable-based parallel robots, based on the number of cables (m) and the number of degrees of freedom (n), can be classified into three categories, that is, the incompletely restrained parallel robots (m < n + 1), the completely restrained parallel robots (m = n + 1), and the redundantly restrained parallel robots (m > n + 1). Highly dynamic gangue pick-and-place requires a high payload-to-weight ratio, as well as a high positioning accuracy. And fortunately, the cable-based parallel robots meet these requirements on this occasion. Therefore, this kind of robot, recently, has been focused on the robotic separation of gangues from coals, and furthermore, a completely restrained cable-based coal–gangue picking robot with an end-grab, whose end-effector has three translational degrees of freedom driven by four cables, is proposed to realize the separation of the coals and gangues. 2 It should be pointed that the investigated cable-based coal–gangue picking robot consists of a cable-driven system and an end-grab possessing a certain degree of freedom to adjust its attitudes while the three translational degrees of freedom is achieved by the four cables, and therefore, the robot can be seen a cable-based parallel robot with a point mass. For using cable actuation in the robot, there are not only the advantages but also problems come from it. One most critical issue focused herein is a problem of the stability of the robot. 10 It is worth remarking that the stability of the robot introduced here is associated with a particular position where a family of cable tensions is required to make the end-grab be in equilibrium. Therefore, the stability of the robot here is similar to the one of the compressive bar system of material mechanics, and similarly, the cable possessing the minimum cable tension at an arbitrary equilibrium position may be slack when the minimum cable tension is less than a certain value, leading to missing the ability to control the end-grab. That is to say, the stability of the robot studied in this article, which is pose-dependent and tension-dependent, is a kind of stability in a structural sense, which is different from the one in the Lyapunov sense reflecting the ability of a system to return to the equilibrium after being disturbed. 11 As a result, special attention should be paid to the fact that the proposed stability is a structural stability in this article. It is worth mentioning that the stability measures of the cable-driven system is the topic of the current work, while the attitudes of the end-grab, admittedly, has the essential effects on the stability of the robot, and furthermore, the stability measures with a hybrid force-pose property for a cable-driven parallel robot is the topic of the ongoing work. Therefore, particular emphasis must be placed on the stability of the cable-based coal–gangue picking robot, and while the influencing degrees of the factors on the stability for the robot must be explored, which can provide guidance for the research of robust optimization design of the sorting trajectory and stability control.
The stability is an extremely important index to assess the performance for the cable-based coal–gangue picking robot, and the stability of the robot is directly related to whether the target gangues can be successfully sorted. In fact, the stability mechanism of the cable-based coal–gangue picking robot is extraordinary complicated and influenced by various factors. Therefore, it is very important to evaluate the stability of the robot scientifically and reasonably, so as to improve the stability of the robot. There has been a few works on the stability for the cable-based parallel robots. The stability investigations of under-constrained cable-driven parallel robots, which can enhance workspace accessibility or decrease mechanical complexity and robot cost, have been done in existing literature. 12,13 Surdilovic and Radojicic 14 presented a practical equilibrium stability analysis for the under-constrained cable suspended parallel robots with pulley elements, which includes both consistency tests of the applied wrenches and eigenvalues assessment of Hessian projected on the null-space of robot Jacobian. Idà et al. 15 proposed a methodology for the computation of the natural oscillation frequencies of underactuated cable-driven parallel robots while the end-effector is in free motion, in which the equilibrium stability of the free motion for the robot is investigated in detail. Behzadipour and Khajepour 16 developed an approach to evaluate the stability of cable-based parallel manipulators by the total stiffness of the robot. Liu et al. 17 studied the minimum cable tension distribution law for the cable-based parallel robots and analyzed the stability of the robot qualitatively using the minimum cable tensions. However, the literatures mentioned above are too strict to make definition of the stability for these robots, and their stability state only has two states: stable and unstable, so it is impossible to evaluate the stability of these robots objectively and accurately. The most closely related concept of stability is that of robustness. Bosscher 18 investigated a slope-based disturbance robustness measure for the under-constrained cable-based robots. Liu and Qiu 19 extended the stability of the cable-based parallel robots from the binary state to the interval [0, 1] and put forward a hybrid stability evaluation method, which can be used to analyze and study the stability of the cable-based camera robot quantitatively. Zhigang et al. 20 obtained the motion stability evaluation index for the under-constrained multi-robot coordinated lifting system based on the kinematics and dynamics, to solve the motion stability evaluation problem of the lifting system. In fact, the positions of the end-effector and the cable tensions have different influences on the stability of the cable-based parallel robot, and therefore, the sensitivity of the factors above to the stability is different, only few reports, however, have directly studied the relationship between the stability and the influencing factors for the cable-based parallel robot.
The stability sensitivity, in the stability analysis of the cable-based coal–gangue picking robot, can reflect the influence degree of each influencing factor on the stability of the robot and, furthermore, rank their sequence based on their importance. In the process of sorting trajectory planning and motion control, the most sensitive factors of stability must be accurately controlled, thus providing theoretical support for the stability theory research, robust optimization design of sorting trajectory, and robot control. There are many factors that affect the stability of the robot, such as the positions of the end-grab and the cable tensions, and so on. In the optimization design of the sorting trajectory and robot motion control, the most sensitive factors affecting the stability of the robot should be paid attention to preferentially, where stability sensitivity analysis of each influencing factor is required to obtain the sensitivity of each influencing factor. In the actual motion control of the cable-based coal–gangue picking robot, the motion trajectory of the end-grab can’t be exactly as the same as that designed in advance. And therefore in this case, can the end-grab be stable along the predetermined trajectory in the actual operation process? That is to say, whether the changes of movement parameters will have a great influence on the stability of the robot, or whether the stability is sensitive to the change of movement parameters. This is the stability sensitivity analysis for the cable-based coal–gangue picking robot. The existing literature mainly focuses on the stability evaluation of the cable-based parallel robot, but few researches focus on the stability sensitivity. The slope stability and its sensitivity have researched systematically, 21 –23 but most of them study the influence degree of different influencing factors on the slope stability by adjusting the value of a certain influencing factor while keeping other influencing factors unchanged. This single factor sensitivity analysis method can easily determine the influence degree of the different factors on the stability of the robot, but the dimensions of influencing factors are not uniform and the magnitude orders of various factors are quite different, and thus the calculation results are not directly comparable. 24 Grey relational analysis has been widely used in the slope stability sensitivity analysis on the influencing factors because of less data and simple calculation steps required. 25 And in detail, the correlation degree, in grey relational analysis, is a relevance measure between different influencing factors and determines the main factors using a methodological approach. Basically, grey relational analysis could identify the main influencing factors among numerous important factors. 26 The grey relational analysis, which can eliminate the influence of the dimensions through data processing in limited information and search out the correlation between the numerous influencing factors, overcomes the deficiency of the single factor analysis method and, ultimately, judges the stability sensitivity of the influencing factors through the correlation degree. 27 As far as the authors concerned, there is no find that the grey system theory was applied in the stability sensitivity analysis for the cable-based parallel robots.
To this end, in this article, aiming at the stability problems caused by the flexibility and unidirectional constrain characteristics of the cables, as well as the dynamic impact of the gangue pick-and-place process, the key factors affecting the stability of the robot are analyzed based on the kinematics and dynamics model of the coal–gangue picking robot, and furthermore, the stability measure method of the robot is put forward. And moreover, the stability sensitivity analysis model is established, in which the influence degree of the factors such as the positions of the end-grab and the cable tensions on the stability of the cable-based coal–gangue picking robot is investigated, and the primary and secondary relations among the influencing factors are determined. Particular priority will be attached to the influencing factors with high sensitivity in the sorting trajectory planning and motion control for the coal–gangue picking robot, which can provide guidance for the research of robust optimization design of the sorting trajectory and stability control. The purpose of the present work is to investigate the stability sensitivity for the cable-based coal–gangue picking robot with grey relational analysis. To the best of our knowledge, there is no published related research in the stability sensitivity analysis with grey relational analysis for the cable-based parallel robots.
The structure of the present work is organized further into five sections: The rest of this article is structured as follows. The stability evaluation model of the cable-based coal–gangue picking robot is presented in next section. Subsequently, stability sensitivity analysis model, in the third section, is proposed based on the grey relational analysis. In addition, the numerical examples, in the fourth section, are carried out, where the grey correlation degree between the stability and the influencing factors was obtained. Lastly, the conclusions and outlooks are provided in the fifth section.
Stability evaluation model
Cable-based coal–gangue picking robot and stability definition
The coal–gangue picking robot proposed in the present work is a cable-based parallel robot, whose end-effector is set as an end-grab (Figure 1). And therefore, the end-grab can move in any direction freely by extending or retracting cables. As shown in Figure 1, the cable-based coal–gangue picking robot stretches over the belt conveyor, and the end-grab can move to the target position of the gangue by coordinating and retracting four cables, which can complete the sorting of the target gangues. The end-grab possesses a certain degree of freedom and can adjust its attitudes. And therefore, it is worth noting that the coal–gangue picking robot can be seen a cable-based parallel robot with a point mass.

Three-dimensional CAD model of the coal–gangue picking robot.
The cable-based coal–gangue picking robot uses light and unilateral property (can pull but cannot push the end-grab) cables to drive the end-grab and complete the target gangue pick-and-place. In fact, the end-grab of the robot is certainly disturbed by the dynamic impact of picking and placing the gangues, and therefore, it is possible that the current state of the end-grab is changed under the interference. If the external disturbance changes the position of the end-grab, the robot is unstable. Therefore, it is noted that the stability of the robot refers to the ability of resisting external disturbances along the weakest constraint direction when the robot is subjected to external disturbances. The stability is mainly affected by two aspects: the positions of the end-grab and the minimum cable tensions. Therefore, the stability is investigated from the positions of the end-grab in the workspace and the minimum cable tensions, and the influence of various factors on the stability is analyzed. And while, the stability sensitivity analysis model of the robot is established to obtain the most sensitive factors for stability, which guides the sorting trajectory design and motion control for the cable-based coal–gangue picking robot.
Stability influence factor analysis
Position influence factor
As in Liu et al.,
10
a base reference frame and a mobile reference frame, denoted by OXYZ in which O is the reference point and O′X′Y′Z′ in which O′ is the reference point, respectively, consolidate in the fixed base and the end-grab, respectively. The end-grab position denoted by
It is noted that the ith cable length Li can be written as

And furthermore, the unit vector along the ith cable denoted by

As shown in Figure 2, the position and cable tensions influence factors are illustrated in detail, where the vertical midline of the workspace is marked as straight line a; the horizontal plane of the workspace where the centroid of the end-grab is located is denoted as plane A; the centroid of the end-grab is currently located at

where

The illustration diagram of the stability influence factors.
Cable tension influencing factor
It is known that maintaining positive cable tension is extremely critical for the purpose of constraining the end-effector. However, the cables are characterized by the unidirectional property, in order to ensure that the end-grab can be control completely, and therefore, the cable-based coal–gangue picking robot must be a redundantly cable-based parallel robot. As a result, there, for the coal–gangue picking robot driven by four cables, will be a total of four cable tension unknowns with three equations. And therefore, the kinetostatic model of the robot can be established using Newton method as follows

where

The vector

where the lower cable tension bound
From equation (4), there may exist an infinite number of valid cable tensions because the cable number is larger than the DOF of the end-grab. Thus, the cable tensions optimization routines, in order to obtain a unique cable tensions, must be executed, and herein the minimum variance is employed to optimize the cable tensions while equations (4) and (6) are set as constraints. Thus, the cable tensions determination can be formulated as follows
where
The minimum cable tension T min where the end-grab locates at any position can be obtained after determining the cable tensions uniquely. In detail, T min can be calculated as

where
T
P, min, as shown in Figure 2, is the cable tension with the smallest tension among the four cables where the end-grab locates at position

Stability evaluation model
The end-grab is motivated by the cables with flexible and unidirectional characteristics, so the cable-based coal–gangue picking robot maybe is disturbed while an external disturbance is input, especially when dynamic impact disturbance of gangue pick-and-place is on. It is therefore of interest to investigate how to evaluate and ensure the stability of the cable-based coal–gangue picking robot. And moreover, if the end-grab equilibrium position changes under the external disturbance, then the coal–gangue picking robot is unstable. In other words, the stability of the coal–gangue picking robot, from above, implies the ability to resist external disturbances at the weakest constraint direction and to make the end-grab be in equilibrium position while the external disturbance is on. It is noted that the factors affecting the stability of the robot include the cable tensions and the position of the end-grab in the workspace. Apart from the above mentioned, when the end-grab locates at the positions with the same minimum cable tensions, the stability maybe is different; while the stability maybe is different when the end-grab locates at the same position because of the different cable tensions. To sum up, the stability evaluation index for the robot can be defined as

where the vector
It can be seen from equation (10) that the stability of the coal–gangue picking robot is an implicit function of the positions of the end-grab and the cable tensions of the four cables. From above, the values of the stability evaluation index lay between 0 and 1, as was stated in the “Introduction” section, it can employ the interval [0, 1] to evaluate the stability of the cable-based coal–gangue picking robot.
In more detail, the stability of the robot is 0 when the end-grab locates at the positions outside the workspace, because the end-grab cannot reach; while the stability of the robot is 1 when the end-grab locates at the position with the best stability in the whole workspace; in other cases, the stability of the robot is interval (0, 1) when the end-grab locates at other locations in the workspace.
The stability sensitivity analysis model
The stability sensitivity analysis for the cable-based coal–gangue picking robot is to study the influence law between the various factors affecting the stability of robot and the corresponding stability. There are many factors causing the instability of the cable-based coal–gangue picking robot, and the influence degree of each factor on the stability of the robot is also different. As a result, quantitative analysis of the influence degree of each influencing factor on the stability of the robot can get the main factors and secondary factors, which is helpful to control the most sensitive factors affecting the stability of the robot and improve its stability. The stability sensitivity of the factors is studied and discussed, which can play a guiding role in the sorting trajectory planning and motion control for the robot. The greater sensitivity of the influencing factors to the stability, the greater the influence degree of the factors to the stability, and vice versa. As mentioned above, the stability of the robot is an implicit function of the end-grab positions and the cable tensions, and the contribution of each influencing factor to the stability has different indirect effects besides direct effects.
A stability sensitivity analysis for the cable-based coal–gangue picking robot is presented to evaluate the important degree of the influencing factors on the stability. The traditional sensitivity analysis is a “change-one-factor-at-a-time” approach where only one factor is varied but all others are fixed. This straightforward approach, however, may produce unreliable results, which leads to an inadequate conclusion. Grey correlation analysis is presented proposed by Professor Deng in the literature, 28 which has advantages over the traditional straightforward method. The grey correlation grades are calculated with the grey correlation coefficients, which is measured the similarity degree of the sequences. The order of sensitivity of the influencing factors to the stability for the robot can then be determined by grey correlation grades. Therefore, the three-dimensional spatial positions of the end-grab and the cable tensions, in this article, are selected to study the influence law of the above factors on the stability of the robot using the grey relational analysis. The purpose of this section was the investigation of the effect of the influencing factors on stability of the robot using grey correlation analysis.
Grey relational analysis, in this chapter, is used to establish the stability sensitivity analysis model for the coal–gangue picking robot. General speaking, the steps of grey relational analysis are as follows: determination of the reference sequence and compare sequence; dimensionless treatment to the two data sequences; calculation of the absolute difference between compare sequence and reference sequence and the correlation coefficient; and calculation of grey correlation degree. 29 Based on grey relational theory, the stability of the robot obtained from the numerical calculation is set as a reference sequence, similarly, while the position of the end-effector and the tensions of the four cables are set as the compare sequence. The evaluation procedures are as follows:
1. Reference and comparison sequence determination.
The numerical results of the stability of the robot are determined as a reference sequence matrix reflecting the robot behavior characteristic, which is given by

Let the seven factors (x-displacement, y-displacement, and z-displacement of the end-grab, the tensions of the four cables) be selected as the influencing factors, and the comparison sequence matrix which consists of the various influencing factors can be denoted as follows

where
2. Dimensionless treatment of data sequence.
In generally speaking, the reference sequence and comparison sequence have their own different calculation units. This point should be noticed that drawing the correct conclusion is difficult due to different dimensional quantities of the initial data. So, a nondimensional data treatment, before calculating the grey correlation degree, is carried out usually. In more detail, the reference sequence and comparison sequence can be respectively transformed as


3. The grey correlation coefficient calculation.
The grey relational grade is employed to measure connection relation between the two sequences. In this study, only one sequence

where

And moreover,
4. The grey related degree calculation.
The grey relational grade being employed to express stability sensitivity for the cable-based coal–gangue picking robot, after the grey relational coefficient is obtained, can be defined as follows

Upon the analysis above, the grey relational grade, which represents the correlation level between the stability sequence and the influencing factors sequence, indicates the influence degree that the influencing factors sequence could exert over the stability sequence. And therefore, the grey relational grade for that influencing factors sequence and stability sequence will be higher than other grey relational grades when a particular influencing factor sequence is more important than others to the stability sequence. And so, the grey correlation degree can be used to evaluate the influence degree of each influencing factor on the stability for the coal–gangue picking robot, and that is to say the stability sensitivity. Through the correlation degree of each influencing factor to the stability sequence, the order of correlation degree can be obtained, and then the main and secondary factors affecting the stability of the robot can be obtained. And moreover, the sensitive factors can be accurately controlled in the robust optimization design of the sorting trajectory and motion control to ensure the stability of the robot.
Results and discussion
Simulation parameter setting
A numerical simulation study is worked out to prove the rationality and effectiveness of the stability evaluation method and stability sensitivity analysis model for the cable-based coal–gangue picking robot in this section. Considering the size of the belt conveyor and the position of gangue recovery bin, the relevant parameters of the cable-based coal–gangue picking robot are selected as follows: the coordinates of the connection points of each cable and pulley are (No. 1 mast is selected as the global coordinate system origin):
Variation range of the influencing factors.

Results and discussion
Combining the stability and workspace of the coal–gangue picking robot, the stability workspace of the robot is produced. And the stability workspace refers to the set of points meeting certain stability requirements of the end-grab. 19 When the end-grab locates at the positions of the stability workspace, the stability of the robot can be guaranteed. Therefore, in practice, the sorting trajectory of the end-grab must be within the stability workspace meeting the predetermined stability requirements.
As shown in Figure 3, the lower boundaries of the stability workspace of the end-grab meeting the predetermined stability requirements are described by “green *,” “red+,” and “blue−,” respectively, using MATLAB. In more detail, the curved surface formed by “green *” is the end-grab position point set with stability equal to 0.4; while he curved surface formed by “red+” is the end-grab position point set with stability equal to 0.5; and in addition, the curved surface formed by “blue−” is the end-grab position point set with stability equal to 0.6. It can be seen from the figure that the stability workspace is located in the middle and upper part of the three-dimensional space formed by the four masts, and its stability can meet the predetermined stability requirements when the end-grab is located at all positions inside the curved surface. The stability and reliability of the coal–gangue sorting process can be ensured only if the gangue picking point and the sorting trajectory of the end-grab are within the stability workspace. Therefore, the research on the stability workspace of the robot introduced here can provide theoretical guidance for the structural size optimization design of the robot.
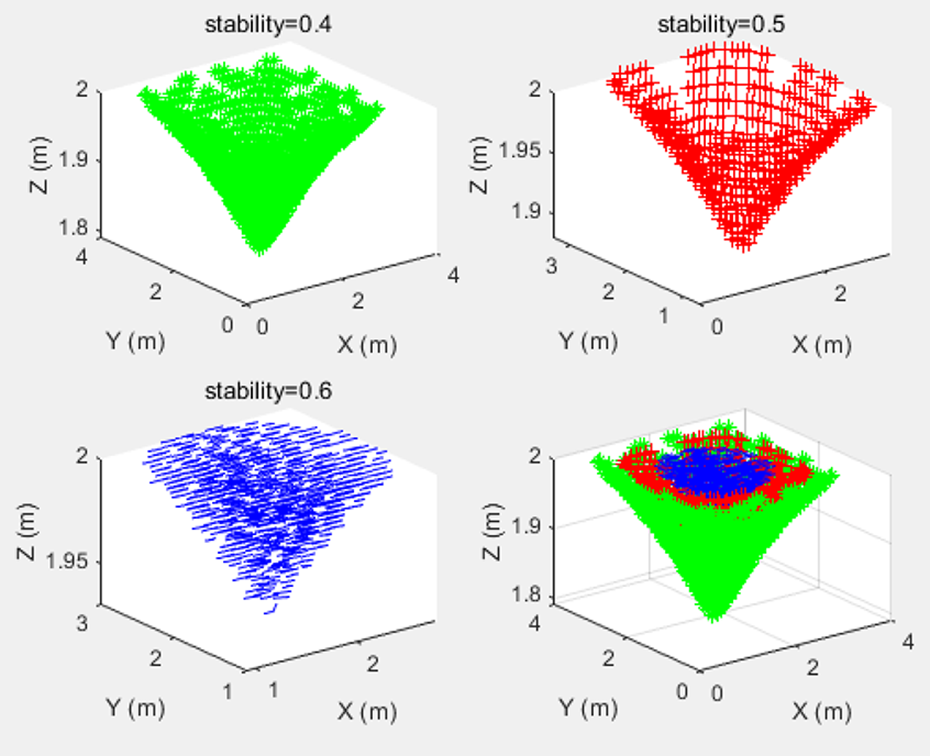
Stability workspace of the coal–gangue picking robot.
In fact, it has been known that the height of the belt conveyor is about 0.9 m, and the end-grab of the robot can only move in the upper area of the workspace when performing the target gangue sorting task. And the target gangue picking is generally completed in a plane with a height of 1 m. Therefore, in order to investigate the influence of the end-grab position and the cable tensions on the stability of the robot, the spiral trajectory within the stability workspace (Figure 4) is selected to explain the stability sensitivity of the seven influencing factors above. According to the relevant parameters of the belt conveyor, the radius of the spatial spiral is R = 0.5 m; while the starting point of spiral is (2.05, 2, 1); and the end point of spiral is (2.05, 2, 2). The stability sensitivity for the coal–gangue picking robot is researched with grey relation method and MATLAB being employed to work out correlation degree between different influencing factors and the stability. Using the equal step method, 101 sets of data about the influencing factors and stability of the coal–gangue picking robot were obtained by simulation, and in which 11 sets of data are selected for stability sensitivity analysis, as shown in Table 2.
It can be seen from Table 2 that for each column of the table, the stability of the cable-based coal–gangue picking robot is between 0–1, which is consistent with the definition range of stability evaluation index; with the increase of the position of the end-grab, the stability is larger, that is to say the stability is enhanced, which is consistent with the conclusion of literature. 19 And with the elevation of the end-grab position in the workspace, the cable tension of each cable gradually increases, because the included angle between the cable and the horizontal plane becomes smaller. Increasing the cable tension can be able to lift the end-grab with the same quality, which is consistent with the actual law. While for each line of the table, the four cable tensions have little difference when the end-grab is at the same position, because the optimization index adopted is to minimize the cable tension difference of each cable in the optimization solution of redundant cable tensions to ensure the stability of the robot (optimization performance index in equation (8)).

Spatial spiral trajectory of the end-grab.
Original data of stability and influencing factors.

As shown in Table 2, it can be seen that the dimensions and numerical values of each influencing factor sequence matrix and the stability sequence matrix are quite different. Before correlation analysis, the sequences
Results of dimensionless processing of raw data.

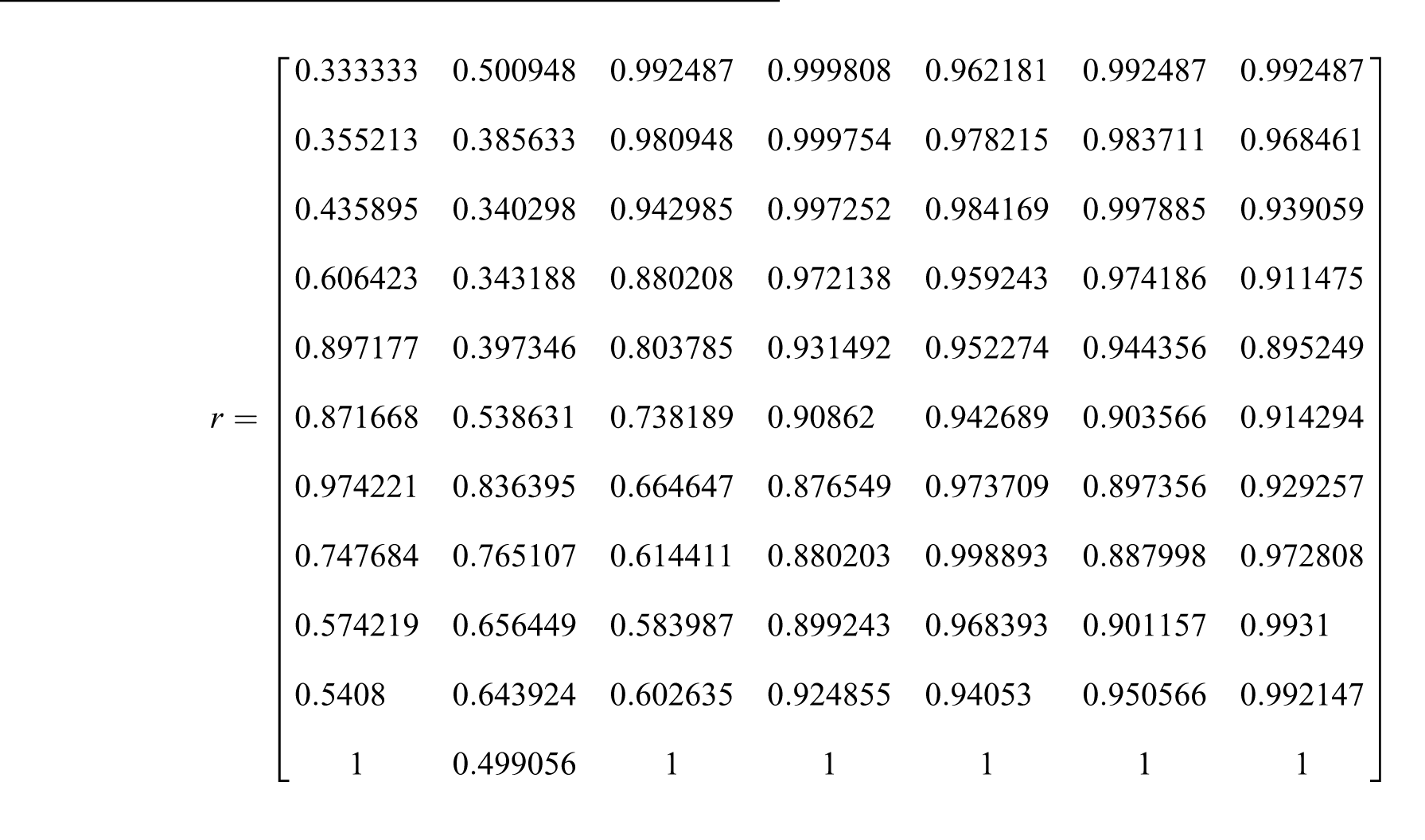
Based on the deviation sequence matrix of each influencing factor sequence and stability reference sequence, the correlation coefficient matrix r can be obtained by calculation according to formula (15)
And then, according to equation (17), the grey correlation degree between each influencing factor and the stability is calculated, and the correlation degree between the stability and seven influencing factors mentioned above for the cable-based coal–gangue picking robot is shown in Table 4. According to the calculation results in Table 4, the results of grey correlation are calculated as follows: Correlation degree of x-direction displacement: rx = 0.6554; correlation degree of y-direction displacement: ry = 0.5439; correlation degree of z-direction displacement: rz = 0.7743; correlation degree of cable tension 1: rT 1 = 0.9387; correlation degree of cable tension 2: rT 2 = 0.9674; correlation degree of cable tension 3: rT 3 = 0.9437; correlation degree of cable tension 4: rT 4 = 0.9519. Among them, the cable tension T 2 has the highest correlation with the stability of the robot, which is 0.9674, whereas y-direction displacement has the least correlation, being only 0.5439.
Sequence of grey correlation degree on the stability sensitivity.

The grey correlation degree of the seven influencing factors on the stability is described in Figure 5(a) when the distinguishing coefficient

Grey correlation degree of stability and influencing factors. (a)
The results of stability sensitivity analysis mentioned above can be applied to the robust trajectory design and motion control for the robot. According to the sensitivity analysis, the robust design of the sorting trajectory for the cable-based coal–gangue picking robot can be completed, which provides guidance for the improvement of motion control accuracy and the stability. To this end, the stability sensitivity analysis for the coal–gangue picking robot has certain theoretical significance and engineering practical value.
Conclusions
In this article, we focus on the stability evaluation approach and stability sensitivity analysis model for the cable-based coal–gangue picking robot, in which the research presented reports a stability sensitivity analysis of the seven factors influencing the stability by using grey relational analysis. The main contributions of this study include the following:
A stability evaluation approach for the cable-based coal–gangue picking robot, which is a kind of stability in a structural sense, is proposed, and the end-grab position set which can guarantee the predetermined stability requirements is determined, which provides a guiding direction for the stable and reliable sorting trajectory planning and design of the robot. In the future, the dynamic stability measures of the robot are a subject of the on-going work.
The stability sensitivity analysis model for the cable-based coal–gangue picking robot based on grey relational analysis is established, which, to the best knowledge of the authors, has never been applied to investigate the stability for other cable-based parallel. The stability sensitivity on selected seven influencing factors is analyzed by means of numerical simulation and grey relation analysis. Contributions of each influencing factors on the stability are also determined, and the primary influencing factors of the stability are obtained.
A comprehensive understanding of the stability and sensitivity mechanism provides a basis for the robust optimization design of the end-grab sorting trajectory and motion control. In the trajectory planning and motion control, the cable tensions should be accurately controlled, and the control accuracy of the end-grab in x-direction and y-directions can be appropriately relaxed. Furthermore, this study shows that grey relational analysis is a useful method for evaluating stability sensitivity for the cable-based parallel robots. This method can be used to optimize the stability of other cable-based parallel robots.
In this article, the stability sensitivity of the influence factors, such as the positions of the end-grab and the cable tensions, is explored. In the coal–gangue picking-and-placing process, the total mass of the end-grab must be changed, which will inevitably affect the stability of the robot. And furthermore, the future extension of this work will cover this topic in greater depth.
Footnotes
Data availability statement
The data used to support the findings of this study are available from the corresponding author upon request.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research is supported by Open Fund of Key Laboratory of Electronic Equipment Structure Design (Ministry of Education) in Xidian University. The authors gratefully acknowledge the financial support of the Shaanxi Province Natural Science Basic Research Project under Grant No. 2019JQ-796.