
Abstract
Pneumatic artificial muscles (PAMs) are expected to play an important role in endowing the advanced robot with the compliant manipulation, which is very important for a robot to coexist and cooperate with humans. However, the strong nonlinear characteristics of PAMs hinder its wide application in robots, and therefore, advanced control algorithms are urgently needed for making the best use of the advantages and bypassing the disadvantages of PAMs. In this article, we propose a full-order sliding mode control extended state observer (fSMC-ESO) algorithm that combines the ESO and the fSMC for a robotic joint actuated by a pair of antagonistic PAMs. The fSMC is employed to eliminate the chattering and to guarantee the finite-time convergence, and the ESO is adopted to observe both the total disturbance and the states of the robot system, so that we can inhibit the disturbance and compensate the nonlinearity efficiently. Both simulations and physical experiments are conducted to validate the proposed method. We suggest that the proposed method can be applied to the robotic systems actuated by PAMs and remarkably improve the performance of the robot system.
Introduction
Advanced robots are expected to be able to coexist and collaborate with human natural as well as interact with the environment and other robots safely and efficiently. 1,2 Human-like motion compliance and flexibility are critically important for a robot to carry out a task in the human-centered, complex, unstructured, dynamic daily-living environment. 3,4 Sadrfaridpour and Wang have experimentally proven that the anthropomorphic features of the robot and the human trust motion pattern of the robot are very important for performing human–robot collaboration tasks, which may reduce the human burdens and increase the utilization of robot significantly. 5 Kato et al. reported that the unexpected speed variation of an industrial robot arm will increase the “surprise” subjective rate, which will cause the mental strain of human cooperators. 6 Bortot et al. emphasize that the human cooperator will feel comfortable when he finds the robot’s behavior is predictable, otherwise, it will pose him a mental burden, which will reduce the efficiency of human–robot cooperation. 7 It is crucial for effective human–robot collaboration that the robot’s motion patterns are natural and predictable for the human cooperator. 8
Studies in physiology, anatomy, biomechanics, and neuroscience have revealed that human motion has its own special characteristics. 9 The motion of human arm in the free space is assured satisfying the minimal jerk model, namely, the motion of the human arm conforms to the logistic equation and shows a bell-shaped velocity profile. 10 –12 Researchers have been endowing both an autonomous robot and a teleoperate robot with human-like motion patterns. This is to say when a human master operator or a higher-level decision-making module issued an order, the slave robot or an autonomous robot is able to perform the expected motion in a human-like manner.
A human-like motion pattern of a robot needs to be realized via a human-muscle-like actuator. The pneumatic artificial muscles (PAMs) are exactly a kind of actuators that possess the similar actuating properties of human muscles, 9,13 moreover, it possesses a lot of other advantages, such as natural elasticity (compliance), low cost, high power/weight, and power/volume ratios. Therefore, PAMs are regarded as the ideal actuator for cooperative robots and usually be configured as antagonistic pairs to mimic human muscle organization. However, PAMs also possess some unfavorable characteristics, such as nonlinearities, hysteresis effects (the output characteristic curve of the inflation process is noticeable different from those of the deflation process), as well as temperature and humidity drift, which severely impede the modeling and control of PAMs.
Extensive studies have been conducted by researchers to improve the control performance of PAM systems, including the PAM model based on machine learning 13 and artificial neural networks, 14 as well as the control algorithms based on learning vector quantization neural network, 15 fuzzy control, 16 and nonparametric control algorithms, 17 and all of them have demonstrated some exciting results.
The sliding mode control (SMC) is widely regarded as a kind of powerful nonlinear control scheme, therefore, a variety of SMCs have been adopted to control PAM systems. Kang studied the compliance characteristics and force control of the antagonistic pair of PAMs 18 ; Lilly and Liang studied the SMC tracking control of an antagonistic pair of PAMs 19 ; Estrada and Plestan applied second-order SMC sliding mode to control a PAM system 20 ; Shi and Shen proposed a hybrid controller, which combines the SMC and adaptive fuzzy CMAC 21 to control a PAM system; Amar et al. studied the nonsingular terminal SMC 22 ; and Rezoug et al. studied the fuzzy terminal sliding mode controller for a PAM-actuated robot arm, 23 respectively. These studies have shown a vast potential for the application of SMC in the PAM system.
In this article, we propose a control scheme based on both the full-order SMC (fSMC) and the extended state observer (ESO) for achieving a human-like motion pattern on a robotic joint actuated by a pair of antagonistic PAMs. We adopt fSMC because it is chattering free and especially suiting for higher-order nonlinear systems with both uncertainty parameters and external disturbance. 24,25 We adopt the ESO because it is widely used in the active disturbance rejection control 26,27 scheme, and it is suited for observing both the total disturbance and the states of the robot system so as to inhibit the disturbance and compensate the nonlinearity of the PAM system.
This article is organized as follows: The mathematical model of a robotic joint actuated by a pair of antagonistic PAMs is introduced in the second section. The control algorithm that combines ESO with fSMC is presented in the third section. Simulation and physical experiments are conducted in the fourth section to validate the proposed control scheme. Finally, the advantages and some potential applications of the proposed scheme for the robotic system actuated by antagonistic PAMs are summarized in the fifth section.
Mathematical model of robotic joint actuated by antagonistic pneumatic artificial muscles
The antagonistic structure is a typical actuating configuration of the human arm. Therefore, it is widely adopted as the bionic robot arm actuating solution (Figure 1).

The antagonistic muscle pair configuration of human arm joint and the corresponding bionic robotic joint actuated by antagonistic PAMs. (a) The antagonistic configuration of human arm joint, (b) the physical model of the bionic robotic joint, and (c) the configuration of antagonistic PAMs in the robotic joint. PAM: pneumatic artificial muscle.
Though the dynamic properties of PAM are very complicated, Martens and Boblan have proved that accurate and effective control can be achieved via a delicate control algorithm based on the static mathematical models of PAM. 28
Yu has proposed a static mathematical model of PAM, 29 which consists of two parts, that is, the model of the inflation process and those of the deflation process. There is an obvious hysteresis between the inflation and deflation processes. The deflation part of the model is more difficult than those of the inflation part for taking the derivative in modeling the antagonistic robot joint of PAMs, therefore, we only adopt the inflation part of the Yu’s model to modeling the robotic system. As regard to the inaccuracy of the system model caused by the incompleteness of the model of PAM, we count on the robustness of the control scheme.
The Yu’s static mathematical model of PAM is as follows

where F is the output force of PAM;
Equation (1) can be rewritten as

where
The dynamic function of the bionic robotic joint actuated by antagonistic PAMs, as shown in Figure 1, is as follows

where
Substituting the formulas of antagonistic forces of equations (2) into (3)

To ensure the motion of the bionic joint is controlled by the pair of PAMs at all times, the forces exerted by each of the antagonistic pair of PAMs should remain greater than 0° at all times, that is,

where
Set the state variables as

Let

This is a second-order nonlinear system with its control inputs u decided by the inner pressures of the pair of PAMs: p 1 and p 2. By controlling the pressure difference between the two antagonistic PAMs, we may exert the desired actuate force on the studied joint to achieve the expected motion.
Control algorithm combines extended state observer and full-order sliding mode control
As mentioned before, it is very difficult to model the robotic joint actuated by antagonistic PAMs accurately because of the strong nonlinearity of PAM. Therefore, we view the model inaccuracy as a kind of internal disturbance and propose an fSMC-ESO scheme that combines the ESO and the fSMC for a robotic joint actuated by a pair of antagonistic PAMs. The fSMC is employed to eliminate the chattering and guarantee the finite-time convergence, and the ESO is adopted to observe both the total disturbance and the states of the robot system, so that we can inhibit the disturbance and compensate the nonlinearity efficiently. In this way, we try to achieve the robust human-like motion control in the studied bionic robotic joint system.
Human-like motion pattern
Assuming that the free human motion is optimal and corresponds to the minimal jerk model, Flash and Hogan 30 verified that the free motion trajectory of the human hand satisfies the logistic function, which can be described as follows

where
Consequently, we derived that during the robotic joint’s movement, the desired value of the joint angle xd
, angular velocity
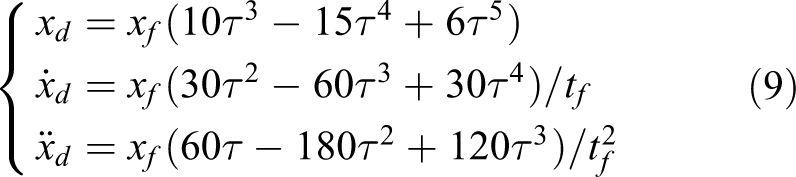
where xf is the maximum rotation angle of the joint, and the initial value of joint angle, angular velocity, and angular acceleration are zero.
Then, the mission of control system design is to make the studied robotic joint tracking the trajectory described in equation (9) to achieve the human-like motion.
Conventional sliding mode control and full-order sliding mode control
Firstly, we control the robotic joint via the conventional SMC (cSMC), 31 which has a linear sliding surface for the system (7) as follows

where
To alleviate the unexpected chattering phenomenon, the control input u is selected as following according to 27

where
We adopt the fSMC sliding surface 24 of the robotic joint system as follows for comparison

where
The control input u is 24

where


The control function (15) can serve as a low-pass filter to inhibit the high-frequency disturbance and enhance the robustness of the system, where
We study the control performance of both cSMC and fSMC controller on the robotic joint system via simulations. The parameters of the mathematical model of PAM are given in Table 1. Sinusoidal disturbance as a kind of external disturbance often occurs in the control of nonlinear systems.
32,33
Therefore, we take
Parameters of mathematical model of PAMs.
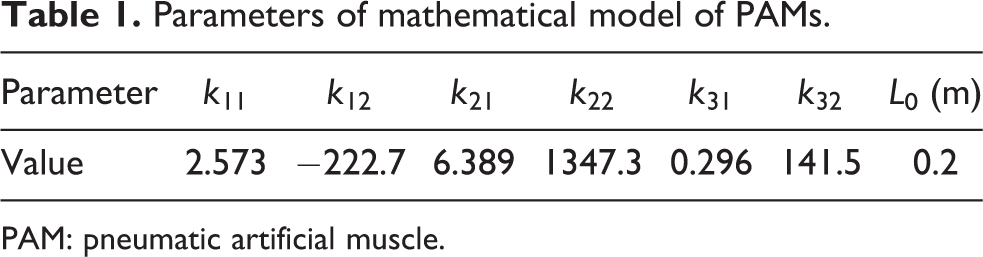
PAM: pneumatic artificial muscle.

Simulation result of cSMC and fSMC. (a) The target curve and tracking performance, (b) the curves of tracking error, and (c) the curves of derivative of the tracking error. cSMC: conventional sliding mode control; fSMC: full-order sliding mode control.
Full-order sliding mode control extended state observer approach
The ESO is able to estimate both the state variable and the total disturbance 34 so as to make the whole control system more robust. Therefore, we combine ESO and fSMC to control the aforementioned robotic joint actuated by PAMs. As mentioned in the second section, when we model the robotic joint system, we only adopt the inflation part of Yu’s static model of PAM for the convenience of calculation. As for the inaccuracy of the system model caused by the incompleteness of the model of PAM, we count on the robustness of the control scheme. We view the uncertainties caused by the model imprecision as a kind of internal disturbance and apply the ESO to estimate the total disturbances (including both the external and the internal disturbances) and eliminate them via fSMC.
Besides the states of x
1 and x
2, as defined in equation (7), we define an extended state

Define z 1, z 2, and z 3 as the estimated value of the state variables x 1, x 2, and x 3, respectively, then we have the following system model of the tracking control system

where

which are positive constants and we set it as
The structure of the tracking control system of the studied robotic joint is shown in Figure 3. It estimates both the internal disturbances (model uncertainty) and the external disturbances with ESO and eliminates these disturbances via fSMC. Consequently, it achieves the expected tracking control performance with the control input as follows

where
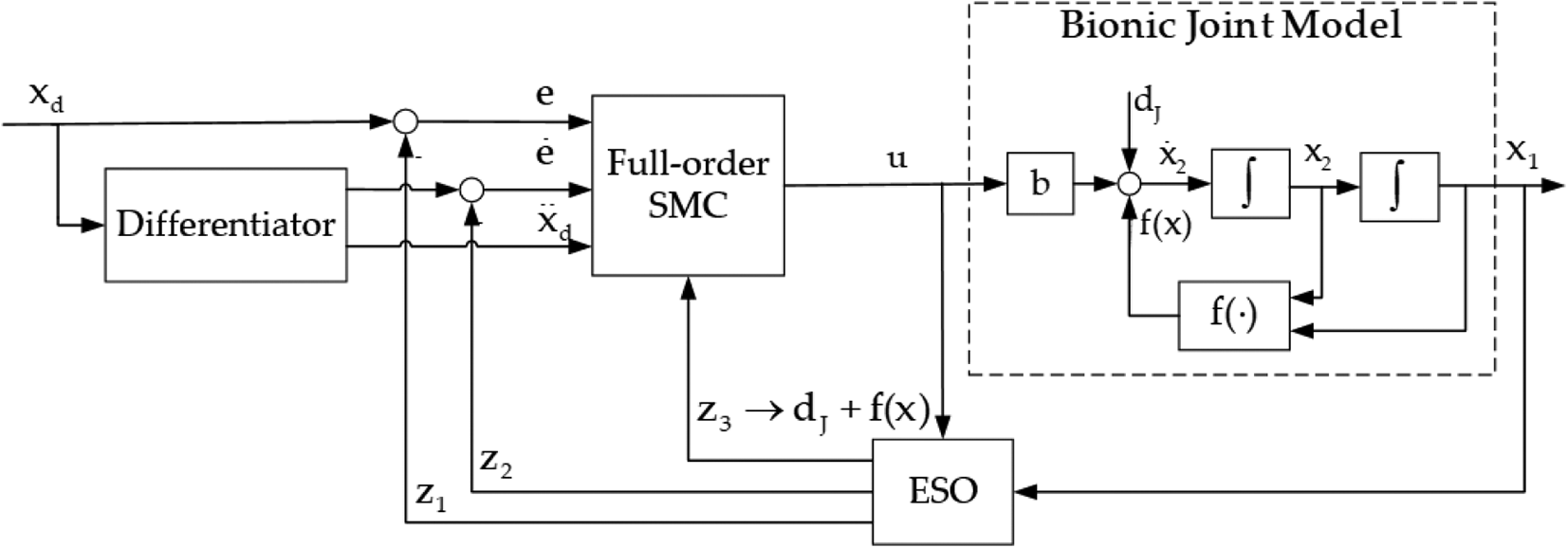
Structure of the tracking control system of fSMC-ESO. fSMC: full-order sliding mode control; ESO: extended state observer.
Again, we validate the performance of the fSMC-ESO approach via simulation by tracking the desired trajectory with a sinusoidal disturbance signal

Simulation result of fSMC and fSMC-ESO. (a) The tracking error and (b) the derivative of the tracking error. fSMC: full-order sliding mode control; ESO: extended state observer.
Both the phase trajectory and the manifold are shown in Figure 5, where e is the tracking error of the robotic joint, de is the derivative of error, and dde is the second derivative of error, and they constitute a three-dimensional sliding manifold. The phase trajectory of the system starts from the beginning point because the initial state of the bionic joint system is zero joint angle, zero angular velocity, and zero angular acceleration. Figure 5 validated that the designed controller will drive the state of the system approaching to and sliding along the manifold, and eventually wrapping around the zero point.

The sliding surface and the phase portrait of sliding motion.
Simulation and physical experiments
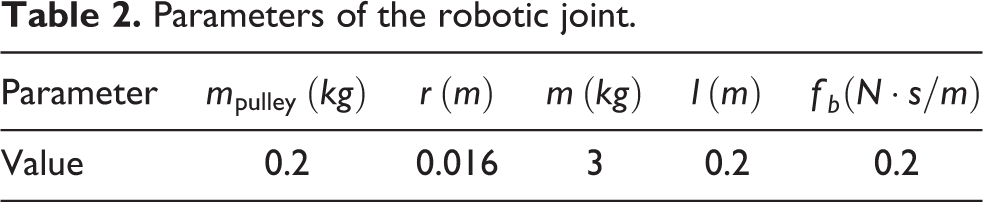
We validate the proposed approach via physical experiments on a robotic joint actuated by a pair of antagonistic PAMs, as shown in Figure 1(b). The PAMs are FESTO DMSP-20-200 with pretension of 40 N, and the parameters of the robotic joint are presented in Table 2.
Parameters of the robotic joint.
We keep the antagonistic tension as a fixed value of
We firstly validate the performance of the proposed fSMC-ESO approach on the bionic joint model without external disturbance (d = 0) with constant external disturbance (d = 2 rad) and with variable external disturbances (sinusoidal signal,

Simulation result of joint angle response under different disturbances.

Simulation of observation result of different disturbances.
Then, when the external disturbance is zero, we change the payload of the physical robotic arm to validate the robustness of the proposed fSMC-ESO approach to the load variation. Figure 8 shows the changing process of tension, pressure, and length of the antagonistic PAMs in the course of human-like motion of the robotic joint with a payload of 1, 3, and 5 kg, respectively. From Figure 8, we can learn that the proposed approach can adjust the air pressure of PAMs according to load variation. As a result, the proposed fSMC-ESO approach possesses good performance of robustness to the payload variation as well as the good performance of human-like motion patterns.
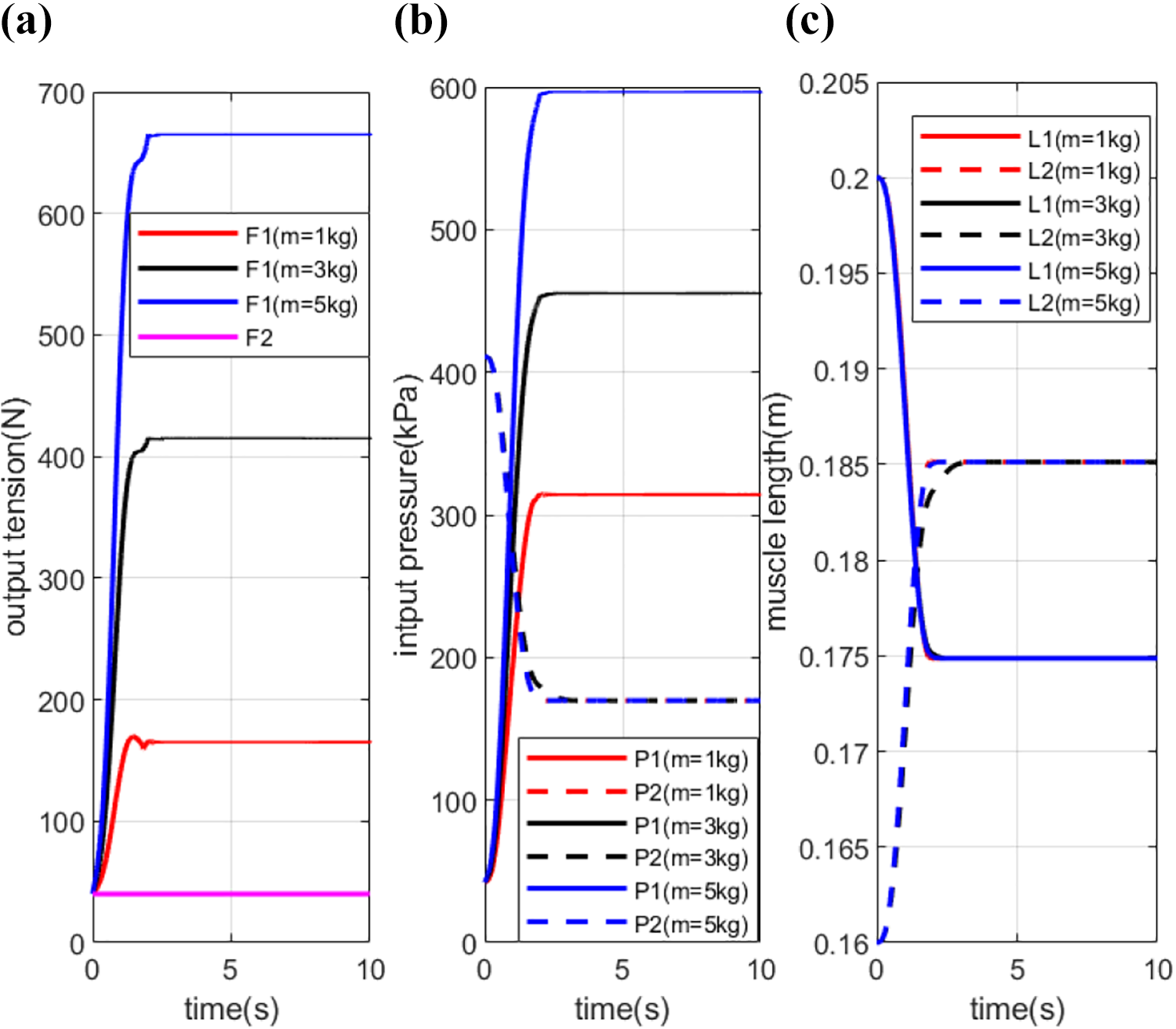
Simulation result of the (a) tension, (b) pressure, and (c) length curves of the pair of PAMs. PAM: pneumatic artificial muscle.
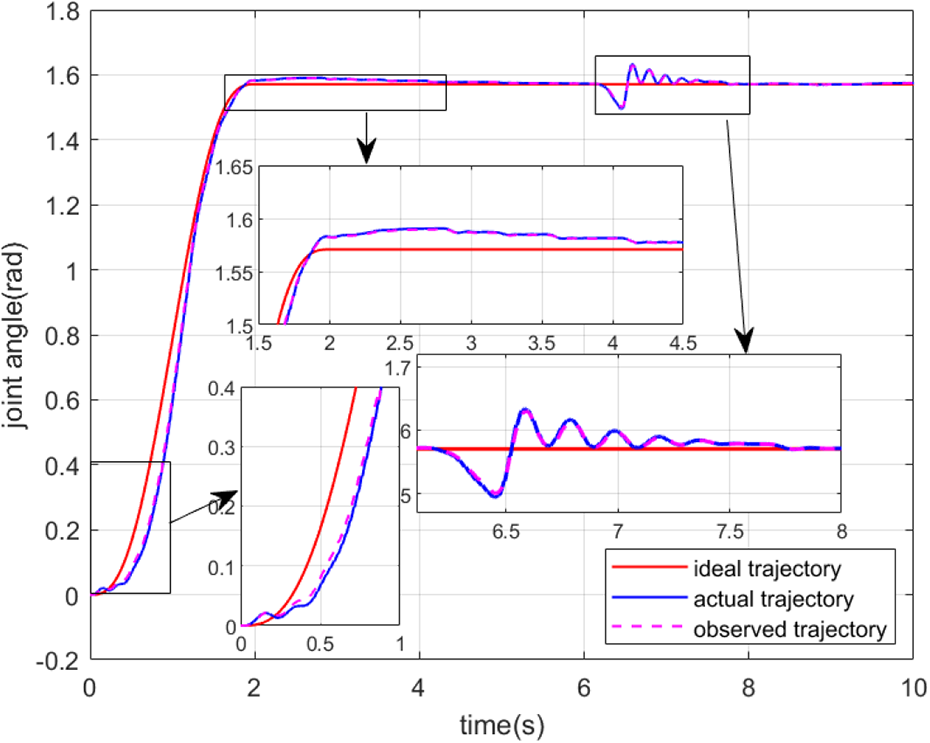
Figures 9 and 10 show two physical experiment results of the robotic joint, from which we can see that the studied approach can achieve the expected human-like motion pattern with a small overshoot (less than 1.2%, i.e. 1.1° angle). An estimated initial value of the total disturbance, which can be approximately determined via simulations and experiments, is helpful for suppressing the fluctuations at the initial period of the rise time, and as a result, improving the performance of the control system. We can estimate this initial value according to the wave amplitude (about 60) of the initial phase of Figure 7 and accordingly adjust it in the experiment. From the experimental results (

Physical experiment results of the angular trajectory of the robotic joint (
Physical experiment result of the angular trajectory of the robotic joint (
Conclusions
PAM prominently possesses desirable compliant actuating properties that are similar to those of human muscles. Therefore, it is expected to play an important role in endowing the advanced robot with the ability of coexisting and cooperating with human beings. However, PAMs also possess strong nonlinearities, hysteresis effects as well as the uncertainty of parameters. These unfavorable characteristics severely impede the application of PAMs. To address this issue, we proposed an fSMC-ESO approach that combines the ESO and the fSMC to achieve human-like motions on a bionic joint system actuated by a pair of antagonistic PAMs and validated that the proposed scheme outperforms both cSMC and fSMC via comparative studies of simulations and physical experiments.
The advantages of the fSMC-ESO approach include the following:
Firstly, the approach can compensate for the imprecision of the plant model. As mentioned, it is very difficult to model a PAM actuator precisely, and the imprecision of the model will seriously impact the performance of the control system. Though hysteresis is a typical feature of the PAM, we achieve good control performance of the robotic joint system by only taking the inflation part of Yu’s static model of PAM in our control algorithm design. These results validated that the proposed approach can observe the imprecision of the system model via ESO, and then view the model imprecision as a kind of internal disturbance and compensate it via fSMC.
Secondly, the approach can effectively inhibit the external disturbances of the robotic system. As mentioned, the PAM is a kind of flexible actuator, which has the advantages of natural compliance for the safety of human–robot interaction but also has the disadvantages of oscillation under disturbance, which will bring adverse impacts on the stability and accuracy of the control system. Again, we validated that the studied approach can achieve good performance by observing the external disturbance (whether constant or variable) via ESO and inhibiting it via fSMC.
Thirdly, the approach can achieve good performance of the human-like motion, which is critical for safe and effective human–robot cooperation. Because of the good (internal and external) disturbance observing and compensating ability of the fSMC-ESO approach, it endows the robotic joint system good performance of robustness and tracking accuracy for the human-like motion pattern of logistic function. We suggested that the proposed method can be applied to the robotic systems actuated by PAMs and consequently improve their performance of human–robot cooperation.
In future studies, we will develop the application of the proposed fSMC-ESO approach on a homogeneous humanoid robotic arm, with which its joints actuated by pair of antagonistic PAMs, to achieve the human-like logistic pattern of arm motion, and finally realize the safe and friendly human–robot interaction/cooperation.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Natural Science Foundation of China [Grant Number 61673003] and the Beijing Natural Science Foundation [Grant Number 4192010].