
Abstract
A novel sliding mode learning controller is proposed for uncertain mechanical system in this paper. The model of uncertain mechanical system is listed first, and then extended state observer is designed for the estimation of the uncertainty. Then, an extended state observer–based sliding surface is constructed. The sliding surface parameters are solved by Lyapunov function approach. Then, a sliding mode learning controller is proposed for uncertain mechanical system to overcome the inherent chattering. Finally, a numerical simulation is given to show the effectiveness of the proposed sliding mode learning controller.
Introduction
Uncertainty is inevitable in actual production process and will certainly bring bad influence to the control performance of a real system. How to estimate and deal with the uncertainty of the closed control loop is very important.1–3 Generally speaking, there are mainly two effective ways to handle uncertainty: (1) estimating the uncertainty online and compensating it in the designed process, and (2) designing a robust controller to reduce its influence. In the estimating and compensating process, neural network and fuzzy modeling technology is utilized frequently, but the amount of computation is really big. In the robust controller designing process, some information of the uncertainty, such as its upper bound, is needed. If the uncertainty can be estimated online, and a robust controller can compensate it in real time, the control performance will be much better and the amount of computation will greatly reduce.
Extended state observer (ESO) is an effective way for the estimation of unknown uncertainty and has been utilized for the observation of uncertainty and external disturbance.4–6 In ESO, the uncertainty and perturbation are all viewed as extended state, and an observer is constructed to estimate them. Based on the estimating result, a controller is designed to compensate it, and then the control performance is improved. In view of the advantages of ESO, it is utilized in this paper to estimate the uncertainty and external disturbance real time in this paper.
Since an observer is decided, a robust controller is then needed. Sliding mode control (SMC) is an effective robust controller.7,8 For SMC controller design, a reduced order sliding surface is constructed first, in which the reduced dynamics are stable. Then, a discontinuous controller is constructed to force the model dynamics to arrive and stay in the sliding surface. In SMC, the system dynamics are unaffected by the disturbance, 9 and so the controller is robust. SMC has been applied to the robust control of uncertain system, such as adaptive control of hypersonic flight vehicle, 10 active suspension vehicle systems, 7 adaptive control of fuzzy system,11,12 and SMC of master–slave time-delay systems. 13 But for the application of SMC, there are also shortcomings.14,15 When utilizing SMC, some information of uncertainty and disturbance, such as the upper bound of them, must be known. For a real system, the interference and uncertainty are difficult to be modeled or measured, so the special upper bound is usually unknown. An effective way for this question is choosing a big enough upper bound for the interference and uncertainty, but this will certainly cause chattering in the control input.16–18 In this case, novel SMC strategy is needed.
Recently, sliding mode learning control (SMLC) strategy is proposed for the controller design of uncertain system. 19 Similar with traditional SMC, a sliding surface is first constructed, and its stability is guaranteed by correctly selecting the parameter of the sliding surface. Then, a learning controller is introduced. The learning controller can greatly reduce chattering, so it is more practical in real application. By the way, SMLC need not prior information of uncertainty and disturbance, no matter whether they are matched or mismatched, it has been widely studied. 20 But the traditional SMLC is certainly conservative since it ignores the information of interference and uncertainty. If the interference and uncertainty can be estimated online, and a corresponding improved strategy is made to SMLC, the conservatism of traditional SMLC will be decreased and the control performance will be much better. Considering the advantage of it, ESO is adopted to estimate the uncertainty real time, and then an SMLC is constructed to deal with the influence of the uncertainty.
A lot of industrial system can be represented by a mechanical system, such as active suspension of vehicle, 21 serial robot arm, 22 planar three-link mechanical system, 23 and rotational mechanical system. 24 For the successful application of industrial system, the control of mechanical system is a hot issue in recent years. 25 However, because of the change of working environment and the existence of various external disturbances, uncertainty and disturbance are inevitable in mechanical system. In view of the representative significance of mechanical system, it is adopted in this paper as the research object. Motivated by the above discussion, an ESO-based improved SMLC is presented for uncertain mechanical system. An uncertain model of mechanical system is proposed first, and then the model is transformed into a standard one, more specifically, a linear uncertain system with disturbances. ESO is utilized here to estimate the uncertainty and disturbance, and then an ESO-based sliding surface is constructed and its stability is guaranteed by selecting parameters appropriately. After getting the sliding surface, a learning controller is proposed for the uncertain mechanical system model. Finally, the proposed ESO-based SMLC is confirmed by a numerical example.
The novelties and main contributions of the paper can be summarized and listed as follows:
A robust controller is designed for uncertain mechanical system with both parameter uncertainty and disturbance; what’s more, the priori information of parameter uncertainty and disturbance are assumed to be unknown.
An ESO is constructed to estimate the unknown parameter uncertainty and disturbance, and then an ESO-based sliding surface is proposed for uncertain mechanical system;
A novel SMLC is proposed for mechanical system. The proposed controller can deal with both parameter uncertainty and unmodeled dynamic without any information of them and can also greatly reduce the chattering of traditional SMC.
This paper is organized as follows. The uncertain mechanical system is listed in the “Problem formulation” section, and the main results are listed in the “Main result” section. Numerical simulation results are proposed in the “Numerical simulation” section. The paper is summarized in the “Conclusion” section.
Problem formulation
Model of mechanical system
The mechanical system is a 2-degree-of-freedom and the sketch of it is given in Figure 1. The equation is listed as

where



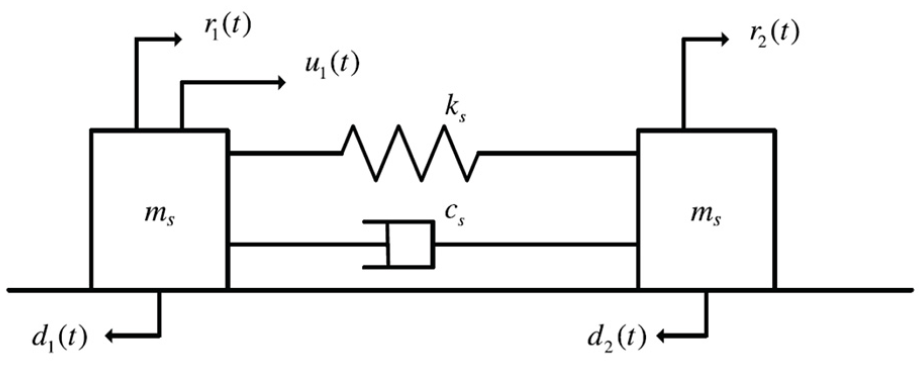
Geometry of the mechanical system.
According to the physical meaning of mechanical system, equation (1) can be rewritten as
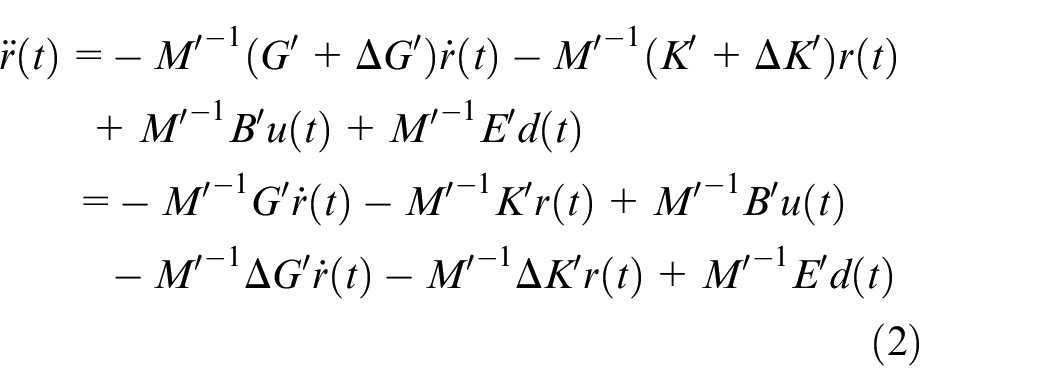
For mechanical system model (equation (2)), choosing the state as

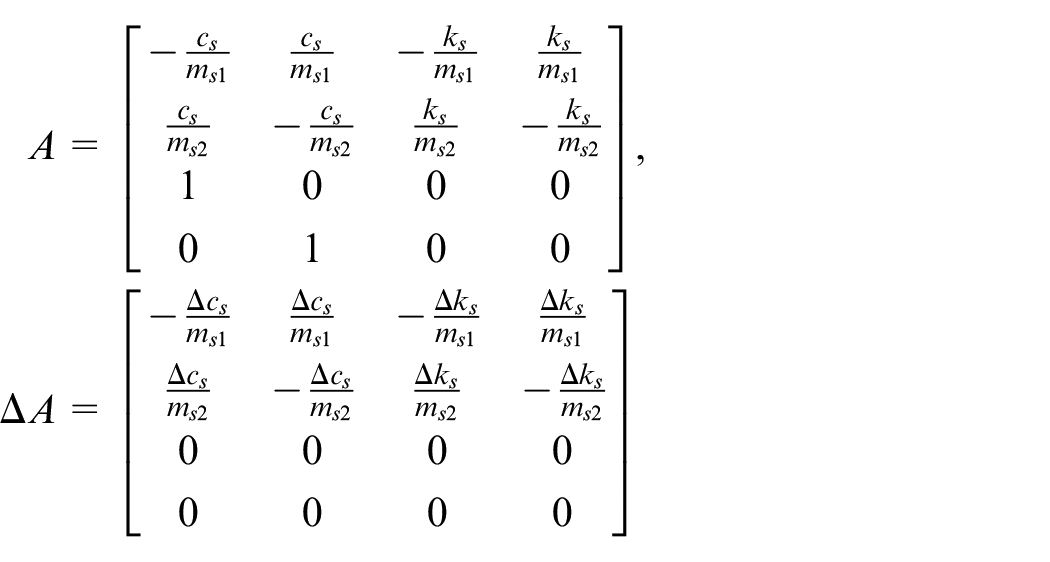
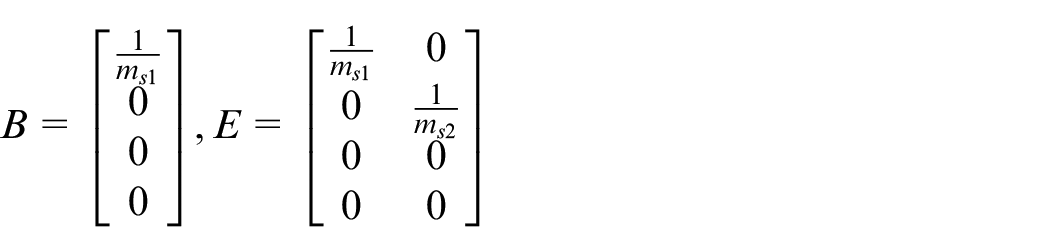
Then, mechanical system (equation (2)) can be rewritten as

where
Control objective
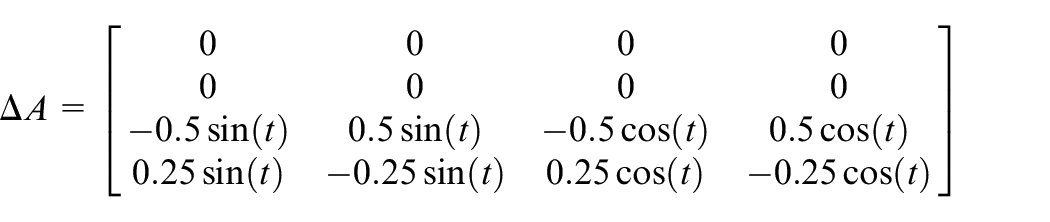
For the uncertain matrix
Main result
ESO design
Equation (3) can be simplified as
where


Assumption 1


where
Remark 1
From equation (4), we can see that
For system (equation (4)), designing a sliding surface directly is difficult because of the existence of unknown
For system (equation (4)), the extended state is chosen as

where


Defining the measurable output of equation (5) as

with


where

where

where
Theorem 1
For observer error system (equation (8)), if there exists a matrix

Then, equation (8) is asymptotically stable and the
Proof
Defining Lyapunov function for equation (8) as

and taking time derivative of
System (equation (8)) is

From equation (10), we can get that equation (11) leads to

If equation (10) is held, equation (8) is stable and
From Theorem 1, the observer error system is stable, then the designed observer (equation (7)) can estimate the unknown uncertainty
ESO-based sliding surface design
Considering the construction of

Then, the linear system can accordingly be rewritten as
where









From Theorem 1, the estimated error

From equation (12)

So the reduced order dynamic is

Then, the sliding surface control design problem is transformed into the design of main matrix

For Step 1, the minimizing problem can be transformed into the following optimal problem:

Through the optimal problem (equation (16)),
where

For the above system, if the designed

with
Theorem 2
For system (equation (17)), if there exists matrices


Then, the reduced closed-loop system (equation (17)) is stable, and
Proof
For system (equation (17)), considering the following Lyapunov function candidate

Taking time derivative of
Since


and

equation (21) can be rewritten as
The reduced closed-loop system (equation (17)) is stable with disturbance attenuation performance

From equations (19) and (20)


Then, equation (22) is guaranteed, and the stability and the reduced sliding dynamics (equation (15)) are stable. The proof is completed.□
Learning controller design
By choosing
For avoiding or at least reducing chattering in the control input, a sliding mode–based learning controller is proposed in this section. Quite different from traditional sliding mode discontinuous controller, the proposed learning controller has the form of

with
where


for
Theorem 3
For system (equation (12)), if

then, the closed-loop system (equation (12)) is asymptotically stable.
Proof
Choosing a Lyapunov function for equation (12)

For sliding surface (equation (13))
where

Using the designed controller (equation (24)) we have

Considering the expression of

Then

The time delay

where
From the proof of Theorem 2 in Hu et al.,
20
whether
Since
Remark 2
Equations (24) and (25) give the expression of the designed SMLC, but how to applied it in practice is still not clear. From equation (24), we can see that the main computation of SMLC is

From the computing expression of
Remark 3
Equations (13), (24), and (25) give the total expression of the designed SMLC, and Remark 2 analyzes the computational complexity of SMLC. From equations (13), (24), and (25), we can see that the designed SMLC is easily to be carried out in practice, so the application prospect of SMLC is broad.
Numerical simulation
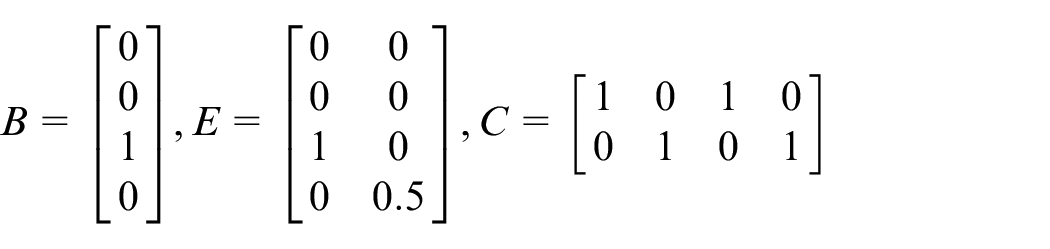
For demonstrating the effectiveness of the proposed ESO-based sliding mode learning controller, a numerical simulation example is considered in this section. The parameters of equation (1) are chosen as follows



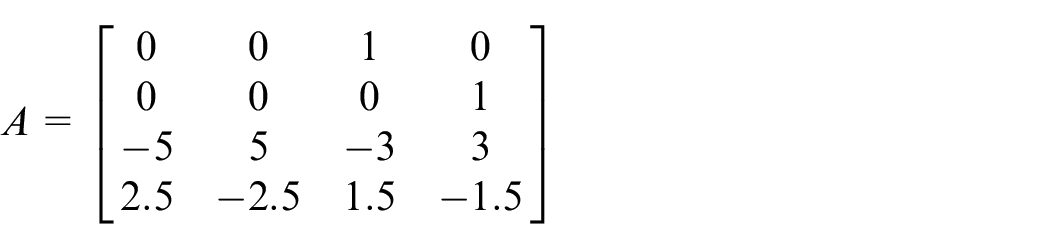
Then, the matrices of equation (4) are
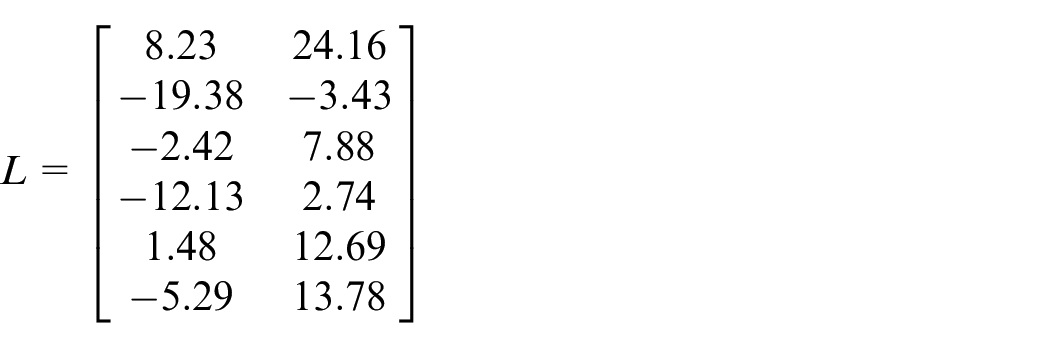
Then, according to the proposed ESO-based SMLC, the observer gain
Then, the sliding surface is constructed and


In the leaning controller, we choose
The initial states of the mechanical system is set to be
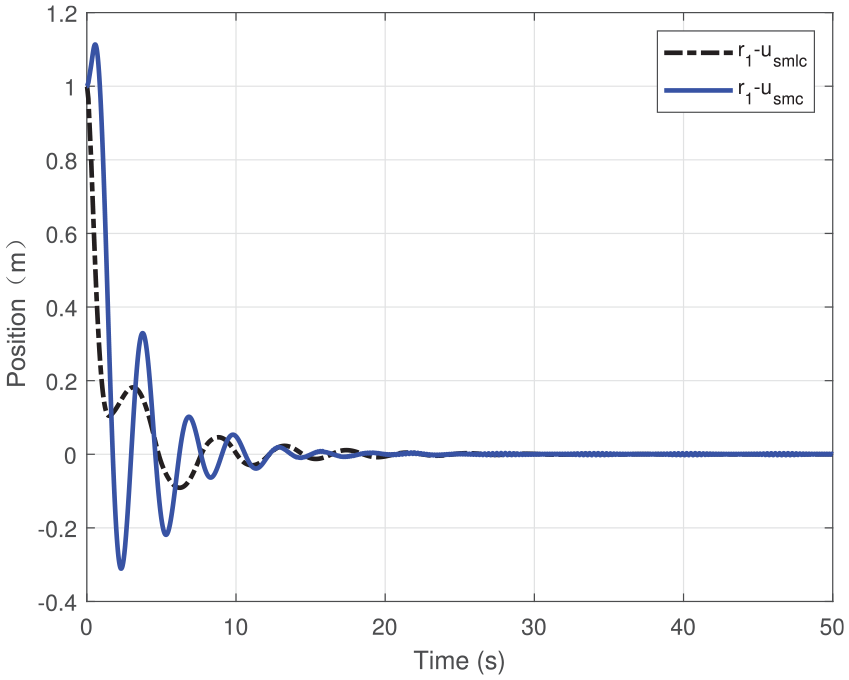
Position
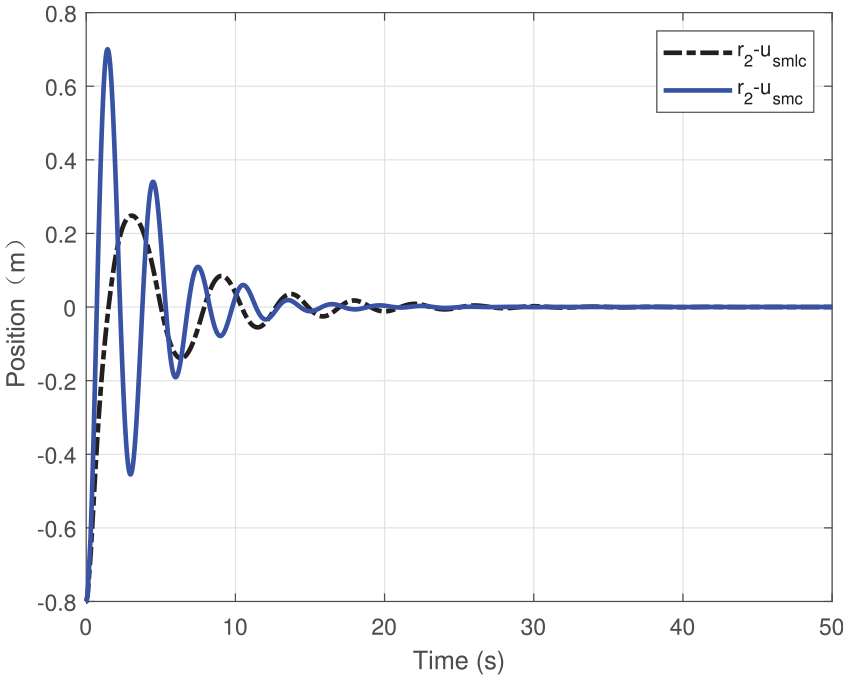
Position
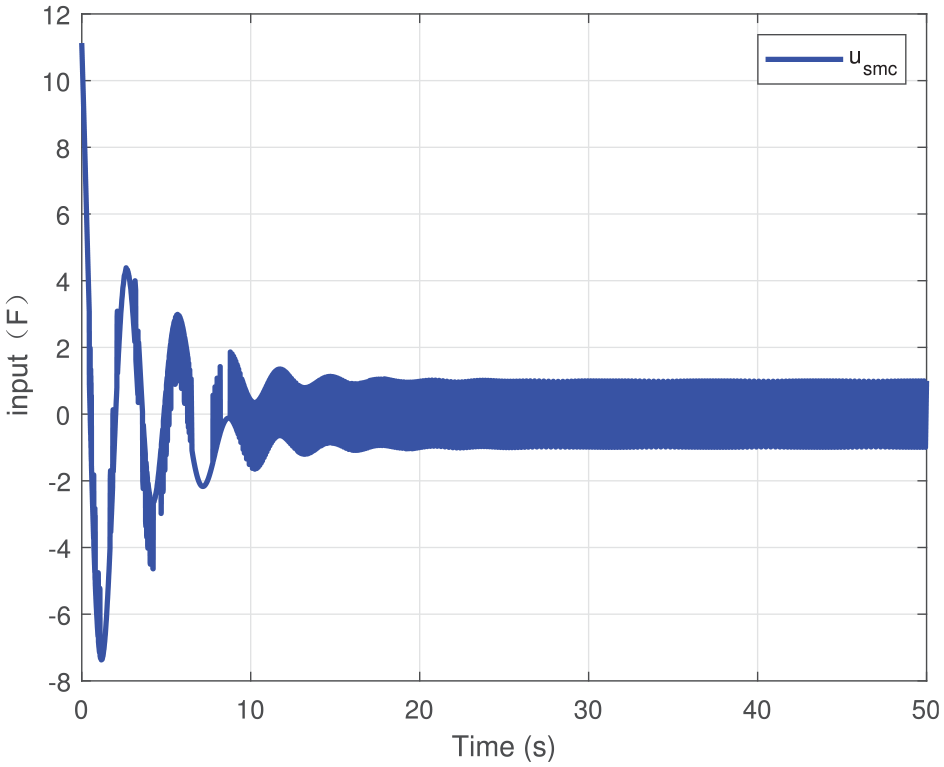
Input of
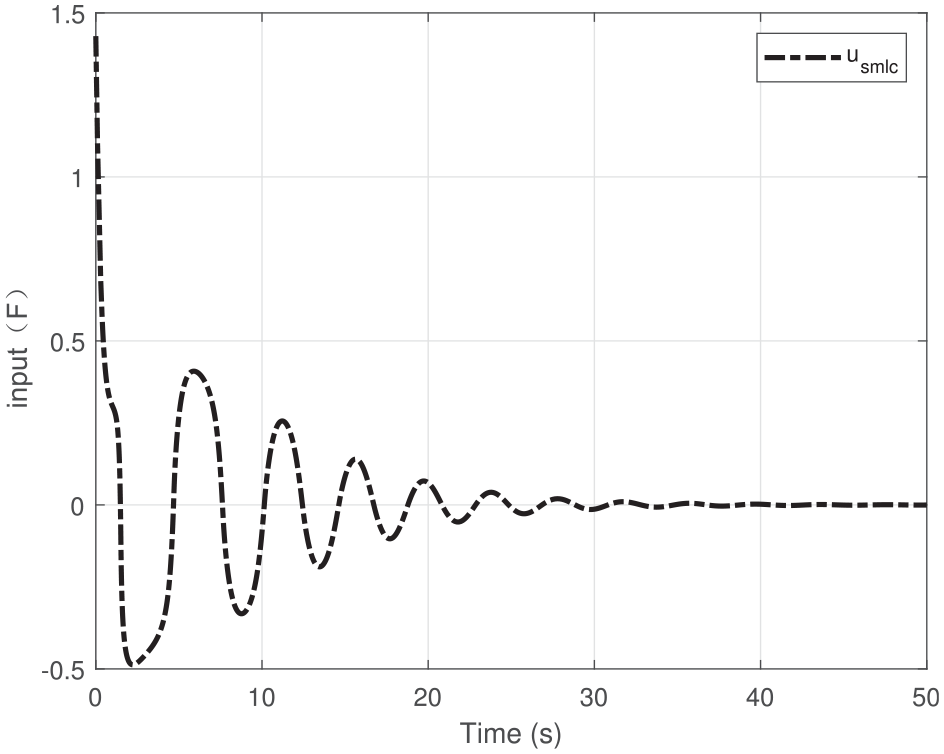
Input of
Conclusion
In this paper, an ESO-based SMLC has been proposed for mechanical system. An ESO is constructed to estimate the unknown uncertainty online first and then an ESO-based sliding mode surface is designed. The stability of the designed sliding surface is discussed. A learning controller is designed instead of the discontinuous controller to guarantee the stable of the mechanical system. Finally, a numerical simulation is proposed to show the good performance of SMLC.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the Fundamental Research Funds for the Central Universities (3102019ZDHQD03, 3102019ZDHKY06), Natural Science Basic Research Plan in Shaanxi Province of China (Program No. 2019JM-127), Aeronautical Science Foundation of China (201707U8003), and National Natural Science Foundation of China (61503392, 61304001, 61773386, 61673386).