
Abstract
To learn the optimal collision avoidance policy of merchant ships controlled by human experts, a finite-state Markov decision process model for ship collision avoidance is proposed based on the analysis of collision avoidance mechanism, and an inverse reinforcement learning (IRL) method based on cross entropy and projection is proposed to obtain the optimal policy from expert’s demonstrations. Collision avoidance simulations in different ship encounters are conducted and the results show that the policy obtained by the proposed IRL has a good inversion effect on two kinds of human experts, which indicate that the proposed method can effectively learn the policy of human experts for ship collision avoidance.
Introduction
In robotics, kinds of collision avoidance techniques have been widely tested in fields, such as smart cars, military robots, entertainment, and service robots, in different environments. These collision avoidance methods are quite specific to individual scenarios. Various collision avoidance methods could be broadly classified into two categories, that is, classical and reactive methods. 1 Early scholars mainly focused on classical methods, such as artificial potential field (APF), 2 cell decomposition, 3 roadmap planner, A* algorithm, 4,5 and so on. The major shortcoming of these classical methods is high computational costs and failure to respond to the uncertainty present in the environment, leading to changing control instructions. In recent years, reactive methods have been accepted as the most popular tool for unmanned vehicle collision avoidance, including Q-learning, 6 artificial neural network, genetic algorithm (GA), 7 particle swarm optimization (PSO), ant colony, 8 and some other evolutionary optimization algorithms, 9 even model predictive control (MPC). 10 Especially for moving obstacles and multiple vehicles, MPC and sliding-mode control could achieve better robustness to disturbance. As reactive methods could deal with uncertainty present in dynamic environment much better than classical methods, most of the existing approaches for ship collision avoidance belong to reactive methods. 11
With the rapid development of intelligent ships, the collision avoidance at sea becomes more and more prominent. Scholars have carried out a lot of research on collision avoidance 12,13 of unmanned surface vehicles (USVs) in recent years, achieving good collision avoidance performance in relatively simple static environments. However, as the kinematics of merchant ships are so different from USVs of which the sizes are small, the collision avoidance law for merchant ships is much more complex obviously.
To gain a proper collision avoidance action for a merchant ship in a specified encounter environment, the obvious solution is to establish the state-action mapping relations. For a single ship in dynamic environments, the state action corresponding to Q-value tables for simple discrete state-action decision problems, such as optimal policy search and path planning, have been put forward. Based on the ship kinematics and Q-learning, Yoo and Kim 14 conducted an automatic ship autopilot control program from start points to end points, among static obstacles, taking the currents into consideration. Chen et al. 15 treated the discretized ship rudder angle as a Q-learning action, corresponding to the ship’s position states with grid map, and verified the effectiveness of the Q-learning for collision avoidance path planning. Zheng et al. 16 established a Markov decision process (MDP) discrete state strategy optimization method based on multiweight apprentice learning, achieving the scheduling policies, which perform close to experts’ experience. Heuristic optimization-based algorithms include GA, 17 and PSO, 18 which have clear and simple structures, being widely used in collision avoidance for intelligent unmanned vehicles. These algorithms usually search the collision-free paths according to the gradient descent direction of a set objective function. In addition, some hybrid methods have also been tested. Shen et al. 19 combined deep Q-learning and A* algorithm to propose an intelligent collision avoidance method for unmanned vessels, considering the ship’s characteristics and bumper areas. Human experience was introduced into A* grid map to improve the search efficiency, which obtains good collision avoidance performance in a complex environment.
Nowadays, machine learning and artificial intelligence tend to be important tools to solve real-time decision-making problems. With the development of deep reinforcement learning recently, scholars have also applied these methods to the controlling of unmanned ships. Based on deep Q-learning networks (DQN), Cheng and Zhang 20 proposed four kinds of objective functions, consisting the reward function and testing the collision avoidance algorithm of vessels. Abbeel 21 put forward the walking control policies for a quadruped robot using inverse reinforcement learning (IRL). With the application of deep learning in the deterministic policy gradient method, the decision-making actions of reinforcement learning can also be approximated as continuous actions using some functions. Continuous action reinforcement learning methods, such as Deep Deterministic Policy Gradient (DDPG) and Asynchronous Advantage Actor-Critic (A3C), have been tested in control and decision-making problems. Xu et al. 22 used the DDPG method to learn collision avoidance behavior in the continuous state and action space, and obtained an effective collision avoidance strategy. Kim et al. 23 also applied the DDPG algorithm to carry out ship collision avoidance policies, using the relative motion parameters between the own ship and the target ships (other ships in the area except the own ship), and the distance between the own ship and the target track. The state-space simplifies the complexity of learning tasks. In the literature, 24 a constrained DQN is proposed to reduce the complexity of the action space by adding constraints based on some collision avoidance rules on the sea, which improves the learning rate of DQN. Generally, the machine learning methods not only have the advantages of strong learning ability but also have the disadvantages of large requirements of training samples. How to obtain and exploit the training samples with high efficiency and accuracy is the key issue in the application of machine learning in ship collision avoidance.
The International Rules for Collision Avoidance at Sea (COLREGs) is the basic rule for ship collision avoidance handling on the sea. To make decisions in different ship encounters for maritime safety, Li et al. 25 constructed a dynamic personifying intelligent decision-making structure for vessel collision avoidance system, considering rules and human experience. Liu et al. 26 established the shortest path model to realize collision avoidance through path planning based on COLREGs. However, the practical collision avoidance of merchant ships has the following characteristics:
1 Large size, large hysteresis and inertia
Since merchant ship has the characteristics of large size, small redundancy space, and large hysteresis and inertias, it is difficult to generate proper collision avoidance decision using conventional algorithms.
2 Complexity and uncertainty of ship collision avoidance scenarios
The COLREGs does not specify all encounter scenarios and may even result in close-quarter situations in several encounter scenarios.
The above characteristics result in the specialty and complexity of collision avoidance of merchant ships. Therefore, the navigation experiences of human experts are still of great significance for learning a collision avoidance policy. To make use of human experts’ experience, the most challenging work is to gain the reward functions of machine learning algorithm. Abbeel and Ng 27 proposed an appealing framework for apprenticeship learning. The reward function, while unknown to the apprentice, is assumed to be a linear combination of a set of state features, which can be observed directly. Although it may be difficult to directly and correctly define the reward function, it is usually much easier to specify the state features on which the reward function depends. With this setting in mind, Abbeel and Ng put forward IRL algorithm to generate a policy that performs at least as well as a human expert with respect to the unknown reward function. Essentially, IRL algorithm is an efficient method for mimicking the expert’s behavior, which was widely tested in many kinds of robots.
To improve the safety and rationality of the ship collision avoidance at sea, an IRL algorithm is proposed in this study to learn an approximate reward function and a collision avoidance policy that approaches the expert’s demonstration operations. Two kinds of expert demonstration operations (safety and efficiency) are learned by the proposed IRL method in simulation tests, and the results indicate that the proposed IRL method can obtain a good collision avoidance policy, which has the similar performance with human experts.
Ship collision avoidance modeling
Collision avoidance of large merchant ships in open waters follows the principle of “using rudder instead of car,” that is, only relying on steering to realize collision avoidance. 28 Therefore, the service speed of the ship is adopted in the entire collision avoidance process in this article and the rudder angle is the action in collision avoidance.
To ensure the accuracy of the collision avoidance model, the following four assumptions are made as follows: (1) The speed of the ship is stable and constant, and the maneuverability of the ship is also stable; (2) it is considered that the collision avoidance process can be simplified to three steering actions before the clearance, that is, two rudder commands to change the course and one rudder command for resailing; (3) ship motions in three degrees of freedom are considered in the collision avoidance process, that is, the sway, surge and yaw; and (4) the ship is located in still water without considering the impact of large wind and waves.
Ship maneuverability model
In this study, the most widely used KVLCC2 ship model 29 is selected as the object, and the ship maneuvering motion model is established to verify the training effect of machine learning on expert demonstration operation. Considering the accuracy and computational complexity, we establish the following nonlinear Nomoto model for KVLCC2

where K and T are the maneuverability indicators of KVLCC2, α is the nonlinear coefficient,

where
Modeling of ship collision avoidance process
As shown in Figure 1, the geodetic coordinate system is defined as

The coordinate system of ship collision avoidance.
Focusing on the mathematical expression of state-action space, the ship encounter state, collision avoidance policy, and rudder actions should be expressed in high-dimensional space for collision avoidance. The state-action dimension needs to be reduced as much as possible to avoid the dimensional disaster problem in machine learning, and the ship collision avoidance process should be simplified to reduce the difficulty of learning.
Generally, the collision encounters are detected by the perception system of a ship and the responsibility of collision avoidance is determined based on COLREGs. If the own ship is the given-way ship and has the responsibility of collision avoidance, the decision result, that is, the rudder command will be applied at the point of the last-minute action to avoid collision and stabilize the course. The detailed process of a typical collision avoidance is shown in Figure 2.

The collision avoidance process.
Firstly, the first steering time is defined by the moment that the own ship needs to steer to increase the heading velocity and change the course for avoidance; secondly, the second steering time is defined by the moment that another rudder angle is applied in the opposite direction to rapidly reduce the heading velocity if there is no collision risk; when the heading velocity of the ship is reduced to a certain extent, a middle rudder is adopted to keep the course, that is, the third steering time; finally, the own ship returns back to the original path by trajectory tracking when the two ships have passed the closest positions, which have the distance of closest point of approach (DCPA).
Remark: DCPA is the minimum distance between the closet points of the own ship and the approaching ship in two-ship encounters, which is an important indicator of collision risk.
In summary, the actions to be decided include the first steering time, the first rudder angle, the second steering time, and the second rudder angle. Besides, the third steering time is automatically decided when the heading velocity is reduced to a certain setting threshold.
Ship collision avoidance based on inverse reinforcement learning
Markov decision process of ship collision avoidance
A multistage MDP is shown in Figure 3 and can be described by tuples

Markov decision process.
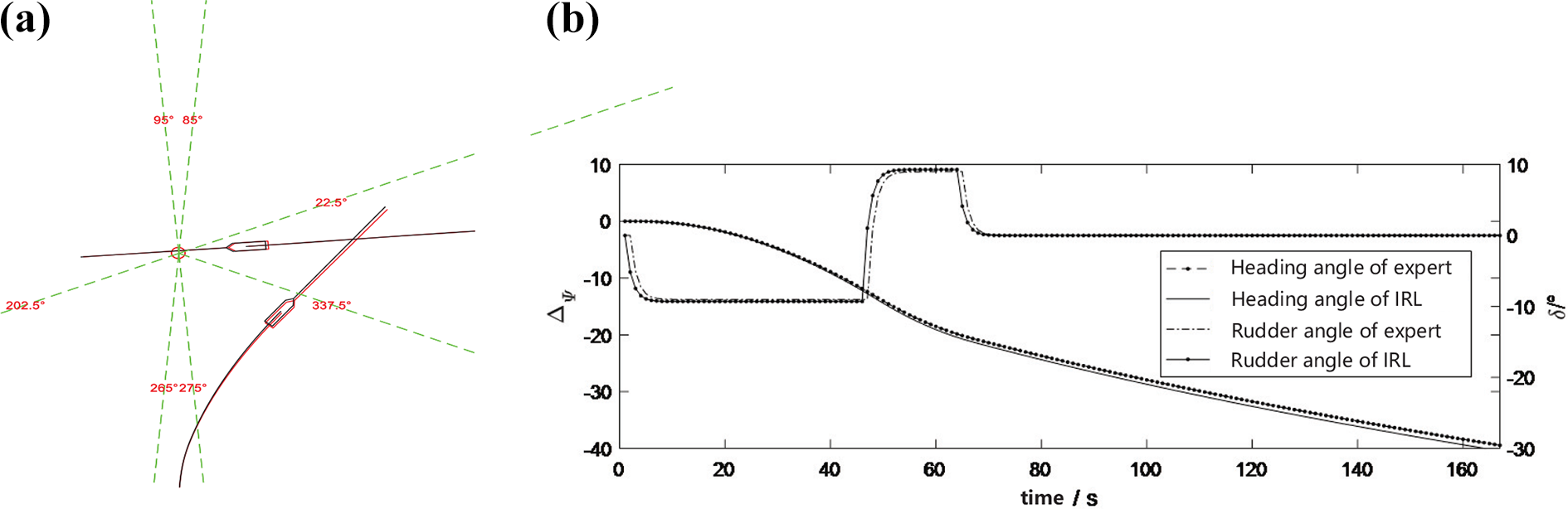
Generally, the positions, speeds, and courses of the own ship and other ships can be used for the definition of the state S. In aspect of the positions and courses, it is considered that the relative position and course of each target ship is limited. The circumference of the own ship is divided into seven sectors by 22.5°, 85°, 95°, 202.5°, 265°, 275°, and 337.5° referring to the dividing method of collision avoidance responsibility in COLREGs, as shown in Figure 4(a). At the decision-making moment, the relative position of the target ship is located in one of the seven sectors based on the relative position angle
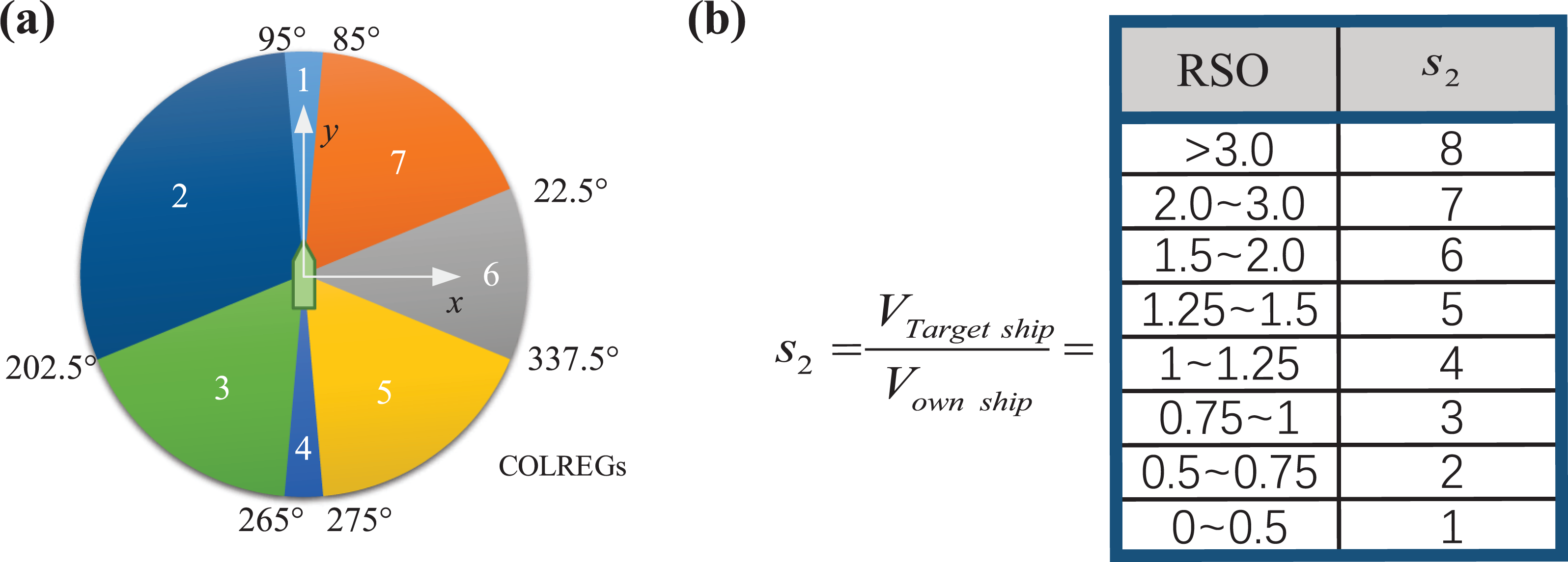
State definition of MDP: (a) state definition of relative position and (b) state definition of RSO. MDP: Markov decision process; RSO: relative speed ratio.

where

where
Construction of the state features
The state features are the indicators of MDP process to construct the final reward, which are very important for reinforcement learning. In the collision avoidance of large ships at sea, the most significant indicators to characterize the process of collision avoidance include two major aspects: (1) DCPA, which is the distance to closest points of approach between two ships and (2) the maximum heading changes of two ships. The former indicator represents the safety level of collision avoidance, while the latter indicator represents the efficiency level.
Similarly, to reduce the complexity of the machine learning, the finite-state features are set, as given in Table 1. Each state feature represents the proportion of collision avoidance samples in a certain interval to large numbers of stochastic collision avoidance samples, which were conducted by simulation programs, thus, all of the 27 state features of ship collision avoidance process are defined.
State features of collision avoidance.
Stochastic policy optimization based on cross entropy
The reinforcement learning for MDP is an optimum policy searching process. The idea of introducing noise cross-entropy (CE) algorithm 31 is to randomize a deterministic optimization problem and solve it using rare event simulation and optimization techniques. The main steps of CE are as follows: (1) Generating random data samples and (2) generating new samples with a certain distribution and optimizing the sample distribution.
Without losing generality, the reward function R of reinforcement learning can be represented by a linear combination function

where
For a random weight matrix
In each iteration of CE, the policy
where

where
The noise CE algorithm


Expert policy approximation based on projection method
As a search process of reinforcement learning, the noise CE method needs to search the optimal policy on the premise of defining the weight matrix of the reward function. The projection method
27,33
is used in this study to obtain the approximated reward of expert policy using the weight matrix
Firstly, the state feature expectations of expert demonstration samples are calculated

where k is the expert demonstration sample size and

Moreover, the flowchart of projection algorithm is shown in Figure 5.

Flowchart of projection algorithm.
The state feature expectation corresponding to the policy
In summary, the reward function is obtained by projection-based IRL, and the CE-based RL method is used to search the optimal policy. The reward function is updated by the difference between the expectations of state features of the current policy and the expert demonstration until the convergence condition is satisfied. The final flowchart of the policy search is shown in Figure 6.

Flowchart of the policy searching.
Simulation experiments
Acquisition of the expert demonstration samples
To conduct the IRL simulation experiments, large amounts of expert demonstration samples are acquired. A simulation software for ship collision avoidance operation based on the established ship maneuverability model is developed, as shown in Figure 7.

Interface of the simulation software for ship collision avoidance.
The software generates different encounter scenarios and judges the responsibility of collision avoidance according to the COLREGs. If the own ship has the responsibility of avoidance, the experts need to drag the horizontal slider to control the rudder angle of own ship to change the course. The software will automatically add the simulation results into training samples.
Validation of the proposed projection-based inverse reinforcement learning method
To reduce the randomness, fixed encounter scenarios are adopted. In range of 0–360°, as shown in Figure 4(a), the interval of the relative position angle of the target ship is 2.88°. The other ship’s speeds are set as 4, 6, 8, 12, 14, 18, 25, and 30 knots, respectively. The own ship’s speed is set as 10 knots, that is, the service speed. With this kind of method, 1000 encounter scenarios are designed and used in the simulation software to obtain demonstrations by experts, and these typical encounter scenarios were called base scenarios. In fact, on the one hand, the movements of ships are so complex that it is impossible to establish all encounter scenarios. In our research, testing set scenarios was classified according to the encounter situation judgment methods in COLREGs. On the other hand, as the directions and speeds of target ships are the major concerns of captains, the states of MDP in our research only consist of
In addition, the experts are divided into two categories, that is, the safety experts and efficiency experts. The safety experts give priority to the safety in collision avoidance, who usually use a larger rudder angle to achieve a larger DCPA and heading change, so as to keep the two ships as far away as possible to ensure the safety. While the efficiency experts give priority to the efficiency, who usually use a smaller rudder angle to shorten the ship’s voyage under the premise of the safety between two ships, so as to improve the economy.
Demonstrations of these two kinds of experts are obtained by four sailors and experts using the simulation software. The discount factor is set as

The feature deviation curve.
It can be seen from Figure 8 that the feature deviations can converge to a good level within about eight iterations. Moreover, the comparison of the state features between the convergent policy and the expert demonstrations is shown in Figures 9 and 10.
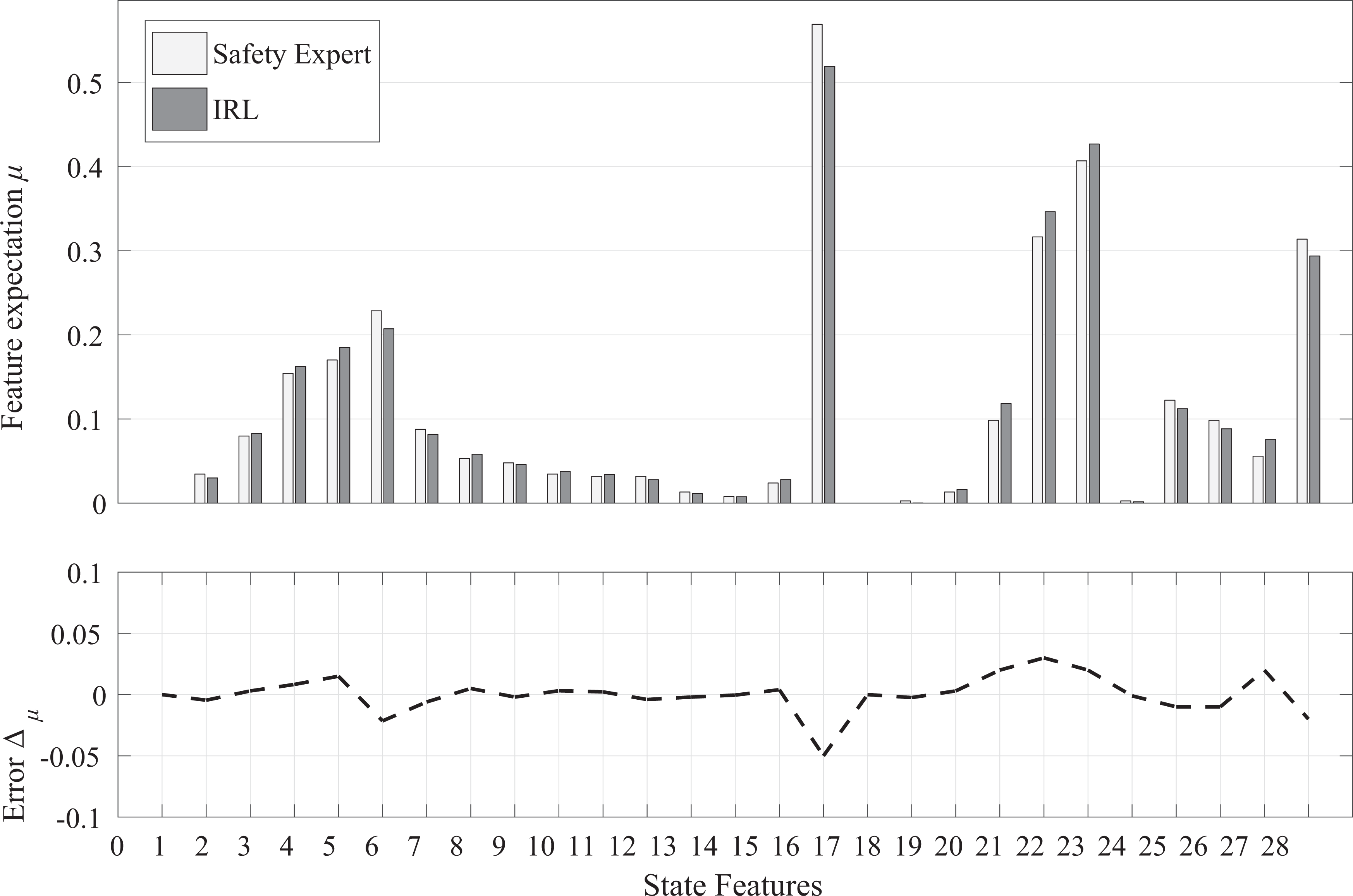
The state features of safety expert and IRL policy. IRL: inverse reinforcement learning.
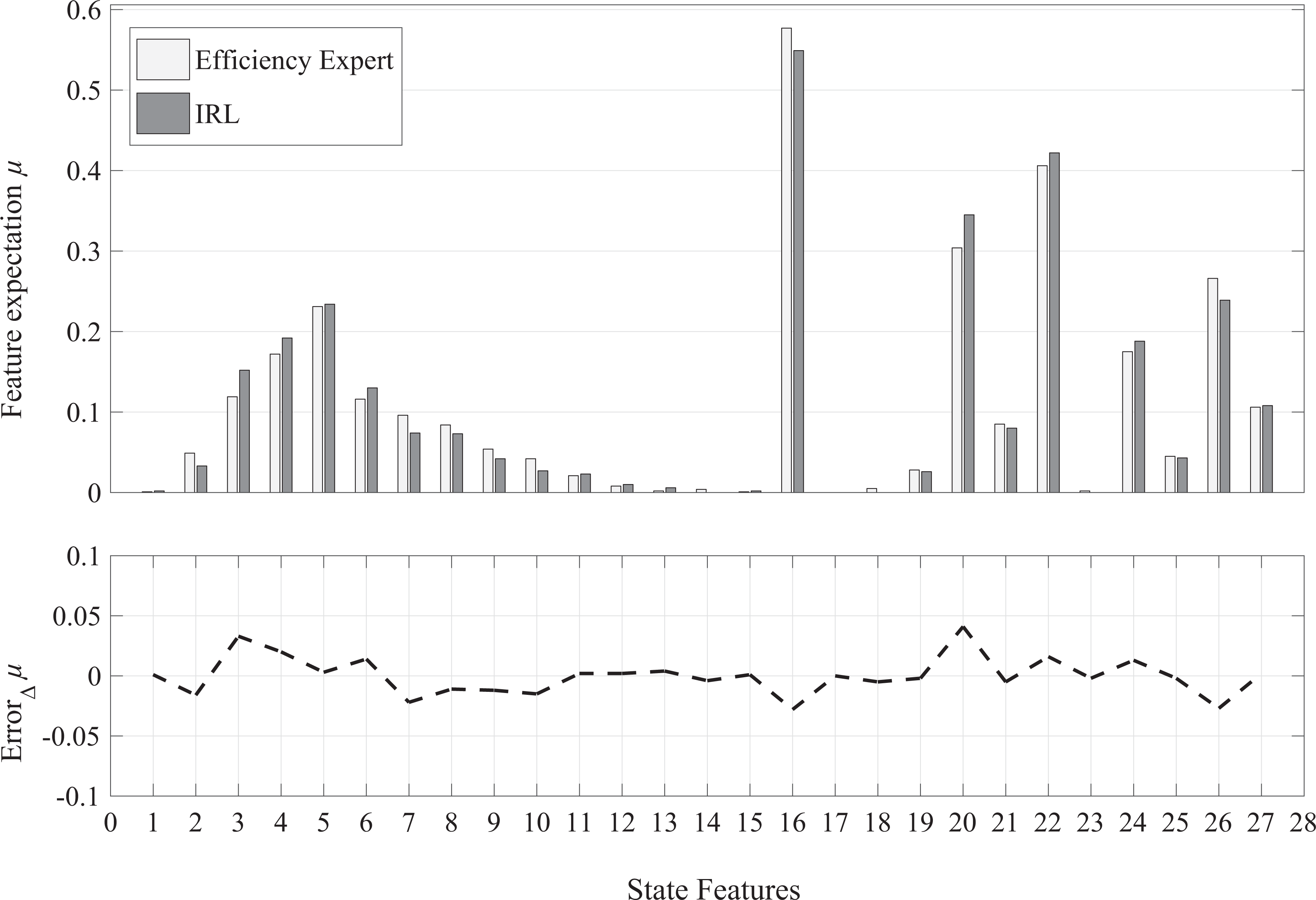
The state features of efficiency expert and IRL policy. IRL: inverse reinforcement learning.
In Figure 9, the maximum error between the state features of the safety expert demonstrations (the white bar) and those of the policy trained by IRL (the gray bar) is less than
In the aspect of the heading change, the largest expectations are the 16th, 22nd, 21st, and 27th feature expectations. The 16th and 22nd feature expectations are the sample proportions of that the own ship and target ships keeping course, respectively, corresponding to the keeping course scenarios, in which the target ship has avoidance responsibility. The 21st and 27th feature expectations represent the sample proportions of that the maximum heading change of the own ship and target ships varies between 40° and 50°, respectively. It can be seen that the safety experts prefer to control the heading change between 40° and 50°.
In Figure 10, the maximum error between the state features of the efficiency expert demonstrations (the white bar) and those of the policy trained by IRL (the gray bar) is also less than
Simulation verification of random collision avoidance
To show the decision-making performance of the proposed IRL method in different collision avoidance scenarios more intuitively, 1000 base scenarios, including head-on, crossing, and overtaking encounters, are selected as typical ship encounter scenarios. The learned policies through IRL are used to control ships during collision avoidance, and the results are compared with the demonstrations of safety experts and efficiency experts in the same encounter scene, as shown in Figures 11 to 16. In Figure 11(a), 12(a), 13(a), 14(a), 15(a), and 16(a), the red curves are the expert demonstrations and the black curves are the ship trajectories controlled by the learned polices. It can be seen that the simulation results of learned polices are very close to those of the safety experts and efficiency experts. From Figure 11(b), 12(b), 13(b), 14(b), 15(b), and 16(b), it can be seen that the rudder angle of the IRL policy is also similar to that of the expert demonstrations, although the steering time is slightly different.

Simulation results in head-on encounter compared with safety experts. (a) Trajectories of two ships in head-on encounter compared with safety experts. (b) Headings and rudders of two ships in head-on encounter compared with safety experts.

Simulation results in crossing encounter compared with safety experts. (a) Trajectories of two ships in crossing encounter compared with safety experts. (b) Headings and rudders of two ships in crossing encounter compared with safety experts.

Simulation results in overtaking encounter compared with safety experts. (a) Trajectories of two ships in overtaking encounter compared with safety experts. (b) Headings and rudders of two ships in overtaking encounter compared with safety experts.

Simulation results in head-on encounter compared with efficiency experts. (a) Trajectories of two ships in head-on encounter compared with efficiency experts. (b) Headings and rudders of two ships in head-on encounter compared with efficiency experts.
Simulation results in crossing encounter compared with efficiency experts. (a) Trajectories of two ships in crossing encounter compared with efficiency experts. (b) Headings and rudders of two ships in crossing encounter compared with efficiency experts.

Simulation results in overtaking encounter compared with efficiency experts. (a) Trajectories of two ships in overtaking encounter compared with efficiency experts. (b) Headings and rudders of two ships in overtaking encounter compared with efficiency experts.
In addition, the DCPA and maximum heading angle changes of expert demonstrations and learned policies are plotted as a box diagram, as shown in Figure 17. It can be seen that the DCPA values of the safety experts and corresponding safety IRL policy are about 480 m, which are larger than those of the efficiency experts and corresponding efficiency IRL policy (about 400 m), indicating that the safety experts and safety IRL policy achieve more safe avoidance results. On the contrary, the efficiency experts and efficiency IRL policy adopt smaller rudder change values to realize collision avoidance with smaller heading angle changes, which means that the own ship can return to the original route faster after collision avoidance is completed. Both own ship and target ship were controlled by the same policy in the simulation software. For example, the target ship in safety experts’ demonstrations is controlled by safety IRL policy. For the same policy, the statistical average heading changes of other ships are less than the own ship since the speeds of other ships in most samples are faster than that of own ship and the experts tend to steer with smaller rudder angles in advance for high-speed ships.

Statistics of experts’ demonstrations and IRL policy simulations. IRL: inverse reinforcement learning.
Simulation comparisons of the proposed inverse reinforcement learning method and normal reinforcement learning method
To compare the performance of IRL and concise reinforcement learning applied in collision avoidance scenarios, concise reinforcement learning was also tested. It is difficult to define the reward functions in collision avoidance. As the state features of MDP is a 27-dimension vector, a linear combination reward function based on state features could be defined as follows

where

The state features of experts and reinforcement learning policy.
How to conduct the collision avoidance according to COLREGs is the major challenge in our research for reinforcement learning. For example, in some encounter scenarios, ships, on one hand, should obey COLREGs, turning to special direction instead of the other direction to avoid potential collision. On the other hand, the responsibility of collision avoidance is so complex that in different encounter scenarios, own ship need not avoid collisions. As a result, it is difficult for reinforcement learning to generate proper policies. Therefore, we develop an expert system, which could judge whether the avoidance action is right based on COLREGs. If the avoidance action does not obey COLREGs, the expert system could generate determine factor as the hard constraints. In Figure 18, the state features of reinforcement learning are similar with the state features of efficiency expert, showing that the weight vector of reward function prefers efficiency more than safety on the basis of satisfying with the safety requirements of COLREGs. Similarly, other optimization algorithms, such as A*, APF, and GA, also need hard constraints based on the expert system of COLREGs.
On the contrary, it is relatively easy for human to control a ship to avoid collision in most encounter scenarios, especially in some complex scenarios. Human experts’ prior knowledge about collision avoidance is so valuable that it could improve the validity and practicability of algorithm. IRL is more suitable to collect collision avoidance policies.
In summary, the IRL algorithm proposed in this article can easily obtain the decision-making policies of human experts, so that the algorithm has a similar collision avoidance performance with human drivers.
Conclusions
An IRL method through CE-based policy optimization and projection-based policy approximation is proposed in this study to realize ship collision avoidance. The main works of this article are concluded as follows: The ship maneuverability model is established, and the expert demonstration operation software is developed to obtain collision avoidance samples through the expert operation. The distributions of DCPA and maximum heading angle change are taken as the state features, and the collision avoidance policy of expert demonstrations is obtained by the proposed IRL method. The learned policy has similar performance with the expert demonstrations, which indicates that the proposed IRL method is suitable for collision avoidance policy training of merchant ships.
However, the practicability of the IRL method also depends on the reasonableness of expert demonstrations. Therefore, it is necessary to follow the captain’s driving habits of real merchant ships and collect real operation data extensively to expand the samples for IRL so as to find a reasonable trade-off between the safety and efficiency for autonomous collision avoidance. Subsequently, further research on the proposed IRL method will focus on data collection of real ship navigation data collection.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Key Research and Development Program of China [No. 2018YFB1600400], the Development of Ship Situation Intelligent Awareness System [MC-201920-X01], the High-tech Ship Project of Ministry of Industry and Information Technology [MC-201712-C07], the National Natural Science Foundation of China [No. 52001243], the Fundamental Research Funds for the Central Universities [WUT:203144003], and the Fund of National Engineering Research Center for Water Transport Safety [No.C2019002].