
Abstract
Unmanned aerial vehicle route planning is a complex multiconstrained multiobjective optimization problem. Due to the complexity of various constraints and the mutual coupling between them, the expression of constraint conditions is not universal and normative. The development, maintenance, and upgrading of an existing route planning system are very difficult. In this article, by establishing the polychromatic sets of aircraft, aircraft equipment, and flight actions, creating the fuzzy relational matrix between equipment and actions and between actions and actions, this article realizes the standardized and generalized expression of the constraint condition of the route planning problem. Then the analysis and inspection of the constraint conditions are realized by the polychromatic sets operation rules.
Introduction
Route planning is to plan one or more optimal or feasible flight trajectories for the aircraft under the premise of comprehensive consideration of the unmanned aircraft mission requirements, fuel consumption, maneuverability, threat avoidance, and flight environment. Route planning is the key to realize the automation and intelligence of unmanned aerial vehicles (UAVs). It is an effective means to improve the combat efficiency of UAVs, implement integrated surveillance, combat operations, and remote precision strikes.
The route planning algorithm must first ensure that the planned route is flyable. However, due to the complexity and strong coupling of the constraints and the complexity and uncertainty of the planning tasks and planning environment, the route planning problem has become a multiobjective optimization problem with strong coupling and complex constraints. The existing mission planning system can only perform constraint decoupling on specific weapon systems. In the planning process, some constraints related to the execution task and the planning environment are considered. The physical constraints (such as minimum search step size, maximum turning angle, and maximum climb angle/dive angle) and planning space (mainly includes digital maps, threat quantification models, etc.) of the aircraft itself are modeled. 1 Based on the sparse A* (Spars A Star [SAS]) method, Chunhua et al. proposed a real-time three-dimensional (3D) path planning method, which converts the constraints of turning, lifting, and terrain matching of the aircraft into the range constraint of single-step optimization search and can effectively avoid terrain collision and threat avoidance. 2 Route constraint check usually refers to the check-in the route planning process, and constraints are often involved in the cost function in the planning algorithm. References 3,4 obtain the collision-free path for robot through collision checking in path planning process. Fadavi et al. use the height, the length of flight route, and the unauthorized areas as the constraints of UAV, with the use of auxiliary points get a fast route planning method. 5 However, due to the complexity of the constraints, some of them often cannot be combined in the cost function, such as the equipment state constraints before and after an action, the time constraints between two matching zones in terrain matching navigation, and so on. Therefore, it is also important to do further detailed checking of the route output from the route planning system. References 6,7 establish a mathematical model for the UAV and its flight environment and attempt to apply it to the route constraint check and route evaluation. This modeling method focuses on the flight performance constraints of the aircraft. However, the cruise aircraft’s flight route planning also involves complex constraints such as load constraints, attack constraints, and navigation constraints, and it is difficult to model using such methods. Besides, most of the modeling methods are specific to particular aircraft, lack flexibility, and universality, requiring remodeling when planning another aircraft. The above constraint models decompose and model the route planning constraints in the problem domain. The expression and use of these constraints often have a strong coupling relationship with the specific UAV and planning algorithms.
To make the planning method more universal, a programming description language emerged. At present, the intelligent planning field has developed planning languages or strategies such as Stanford Research Institute Problem Solver (STRIPS), Planning Domain Definition Language (PDDL), Hierarchical Task Network (HTN), 8,9 and so on. Kewei et al. used PDDL to model and solve imaging satellite mission planning. 10 Zhengqiang et al. used HTN to model the mission planning of imaging satellites. 11 Ping et al. used the AND/OR graph and the optimization of the constraint satisfaction problem to model the aircraft mission planning problem under the dual constraints of time and resources. 12 This modeling method needs to decouple the coupling relationship between the missions or actions in advance and then perform task sequence planning in the time dimension, which has insufficient task planning ability for complex constraints. Qiushi et al. borrowed the idea of PDDL to transform the aircraft’s motion expression into a description of the flight state and gave a state description model of the aircraft constraints. 1 This constraint description method can express lower coupling constraint relationships. It can check whether the flight path satisfies the constraint condition by detecting the flight state of the simulated route. However, this method still needs to decouple the constraints, and its constraint checking can only be performed based on the simulated route sampling. As shown in Figure 1, a route from the planning system is described by the Dubins curve, with multiple navigation and mission points. The purpose of the constraint check is to determine whether the route is flyable and whether the subtasks can be completed successfully. This method requires simulation of flight route based on navigation points and vehicle dynamics model, sampling of the simulated route, and then constraint checking of sampling points. Chunmei and Fengshan 13 established a constrain relation model about the measured feature, probe angles, and inspection planes based on polychromatic stets. They applied this constrain relation model to the optimal inspection path planning algorithm in coordinate measurement. Xianjun et al. 14 established a hierarchical structure model about route constraints based on polychromatic sets. There, the route constraint inspection can only be performed at the route sampling points not directly at the input route’s navigation points.

A Dubins route and its simulation result.
In this article, the polychromatic sets theory is associated with the aircraft’s route planning constraints, and the constraints between the sets are used to express the aircraft’s route constraints. A general constraint model for route planning is established. First, the aircraft and its equipment set is established, and the attributes of the aircraft and its equipment set are established by dyeing the set of equipment. Then the actions set of the aircraft is established, which is used as a unified coloring set of device set; a fuzzy relational matrix is established between the aircraft device and the action and between the action and the action, and the fuzzy relationship is used to express the constraint condition of the route planning problem. Finally, the parsing and inspecting of the constraints are realized by the polychromatic sets operation rules and can get the inspecting result directly from the navigation points of input route.
Introduction to route planning constraints and polychromatic sets
Route planning constraints
At present, a large number of complex constraint inspection work in route planning mainly depend on professionals’ experience and knowledge. Generally, there are dozens or even hundreds of constraints on the aircraft, which are described in the form of the text document, for instance: Route Constrains for XX No other operation can be arranged within 500 m before the start of a turn and after the end of a turn. No longitudinal or lateral maneuvers are allowed in the matching area; the radar altimeter should be turned off during image matching. After the matching area, the straight flight distance should not be less than 500 m; the distance between two matching areas should not be less than 10 km, and the distance between two matching areas should not be more than 20 km. ……There are two stages of using constraint document: the first stage is the planning algorithm design and the software development process; the second stage is the constraint inspection and route evaluation.
In the first stage, it is necessary to decouple some key constraints in the document and establish mathematical constraint models to be used by the planning algorithm. This stage mainly focuses on some physical constraints of the vehicle itself (such as the maximum turning angle and the maximum climbing/dive angle) and the geographical environment. Because the flight conditions also include some other complex constraints such as load constraints, attack constraints, navigation constraints, and so on, it is hard for route planning algorithm to adapt to them, so it is necessary further to check the planned route’s availability before use.
In the second stage, all the constraints in the constraint document are analyzed and decoupled. An available route should satisfy all these constraints. Due to the complexity and importance of this inspection, it is usually done with the help of experts in the relevant field. The article [1] attempts to obtain the flight state sequence along the planned route through flight simulation and then it checks the state of each sampling point by referring to the constraint table to judge the route’s availability. The constraint table’s construction depends on people’s understanding of the constraint document, and the decoupled constraint conditions are expressed in XML format. Besides, this method needs to solve the dynamics model of aircraft to obtain the sampling points along the flight route. This method depends on reliable simulation software, and the amount of sampling data is huge. The following is an XML format constraint for the turning point:

Although this method tries to inspect route constraints automatically, it relies too much on the sampling results of simulation route, and all sampling points adopt unified standardized expression format, resulting in the loss of some key navigation nodes or incomplete information expression, which may lead to some key constraints cannot be checked.
Introduction to polychromatic sets 15
In 1976, Professor Pavlov of Russia (V. V. Pavlov, Fellow of the Academy of International Information Sciences, Vice-Chairman of the Computer Aided Desiqn/Computer Aided Manufacturing/Computer Aided Engineering [CAD/CAM/CAE] Committee) proposed the possibility of expanding the simulation of ordinary set theory, enabling the depiction of the nature of the set itself and its constituent elements. This idea was subsequently used to develop a hierarchical system for object simulation, which led to the concept of polychromatic maps in 1988. The concept of polychromatic sets was produced in 1995. In 2002, the architecture of polychromatic sets was proposed. The 2005 study has made new progress.
The core idea of polychromatic sets theory is to use mathematical models of the same form to simulate different objects. This polychromatic sets based information system is a hierarchical system that organizes and processes information at the collection and logical levels and solves the problem of the underlying specific size at the number level. The information system can process a large amount of information and can be used to simulate large and complex systems. Currently, the main applications are mechanical systems such as product design processes and technical processes. The polychromatic sets collection model can easily describe the relationship between various properties, attributes, parameters, features, indicators, and other technical concepts of complex mechanical systems. The method is simple in the algorithm, easy to expand to complex systems, and convenient for computer programming. The traditional set is the whole of the element, that is

Except for the difference in notation, the other attribute differences between elements
A polychromatic set can be simultaneously colored not only for its elements but also for itself as a whole, representing the attributes of the object and elements under study. The color set

The polychromatic sets’ overall color component
When the simulation object is represented in a polychromatic sets form, its color

here A: a collection of elements,
Establishment of a general model of complex constraints
Route planning is a multiobjective optimization problem with complex constraints. Its constraints can be divided into three categories: state constraints (such as state association requirements between devices), which can be described by Boolean variables; numerical constraints (such as the size of the matching area and the orientation of the target), which are described by discrete values; and interval constraints (such as the radius of curvature, the distance between navigation points, and the height of the ground), such constraints require values to be in a continuous interval, and sometimes there is a desired value.
The collection layer of the constraint model based on the polychromatic sets includes a collection of devices of the aircraft; an action set of the aircraft; and a set of flight missions and a set of flight environments. Together, these sets constitute the basic set of aircraft constraints. The set of states of the aircraft equipment, the set of parameters or ranges of motion execution, the set of missions, and the set of flight environment features form a coloring set (number of layers) of the basic set. The relationship matrix between the above various sets constitutes the aircraft’s flight constraint expression matrix, which expresses the relationship, order, inclusion, dependence, logic, and likeness between the sets or the set elements. It should be emphasized that using the relationship matrix to express the aircraft constraints does not require decoupling between different constraints. The constraint designer only needs to focus on the constraints related to his design and drag and drop the icons through the graphical operation interface. Connections and other methods achieve the constraint formulation process. The coupling relationship checks between constraints are done by the logical operation of the polychromatic sets.
Base set model for route planning constraints
The mission execution process of the aircraft is a series of actions completed. The execution of these actions involves various aircraft constraints, including the overall conditions of use of the aircraft, the equipment status of the aircraft, and the mission information. Therefore, the constraint used in the route planning is actually the action execution constraint, and the constraint refers to the relationship between a series of actions and the aircraft, aircraft equipment, mission information, and so on. To this end, we first establish the basic geometry model associated with the aircraft. The basic set model includes subsets such as aircraft, aircraft equipment, target information, and so on

where
Color feature model of the base set
Each element in the base set has its own attributes or features. For example, the meteorological conditions in the aircraft can be divided into different levels, and the Doppler radar in the aircraft equipment specifies its several states. The above state or value in the base set is called the individual coloring F(a) of the base set element

It should be emphasized that
Aircraft motion set model
Here, we directly define the encoding vector of the action set. These actions are performed in the specific state of the aircraft and its equipment. This set of actions is called the uniform coloring of the base set, and the uniform coloring vector is defined as

Aircraft fuzzy constraint relation model
The constraints in the flight route planning of the aircraft reflect the mutual constraint between action and equipment state and between action and action; the latter can be reflected by the relationship between the current action and the state of the device after the last action. Firstly, we define the relationship between the set of aircraft motions and the set of devices, reflecting which devices are associated with the execution of an action. The relation matrix is a Boolean matrix, which is the relationship matrix between the base set A and the action set F. The relationship matrix called set A and uniform color F is denoted as A × F(A).
The relationship matrix between uniform coloring and the basic set can only reflect which devices are related to the action, cannot reflect the relationship between the action and the device state. To this end, we define the personal coloring F(a) and the uniform coloring F(A). Their relationship matrix is F(a) × F(A). This relationship matrix reflects the relationship between aircraft motion and equipment status.
The relationship matrix between the unified coloring and the basic set can only reflect which devices are related to the action but cannot reflect the mutual constraint between the action and the action. For example, if a turning action is currently being performed, it is required that the action of terrain matching cannot be performed during the turning, so we define the mutual constraint between actions: F(A) × F(A).
The relationship matrices F(A) × F(A) and F(a) × F(A) can be related to actions and actions, actions and device states, but the relationship is static. In many cases, the action relationship is time-dependent. For example, the scene matching process must maintain level flight for a while, such as a constraint that “the B action must be performed before xx km before the A action.” To reflect the time dependence of the relationship, we define the time dependence between the unified coloring (action set) F(A) and the basic set (device set) A, the unified coloring set F(A) and the unified coloring set F(A). Matrix


Since the time scales of different actions are different, the TF
here is a time vector related to the action F. For example, the time range from the start of the turn to the end of the turn is 10 s, and the time range between two match zones maybe 10 min, then
If the element values in the above relationship matrix are taken as Boolean, the set’s deterministic relationship is defined. If the element value is taken as a probability value, the relationship matrix can define a fuzzy relationship between the sets. 16,17,18
Constraint relationship analysis method
The use of the constraint relationship model is divided into two situations, one is to call the constraint relationship in the route planning process for the route planning and the other is to check the constraints of the planned route. Either way, it can be attributed to the question of checking whether the constraint between the action and the action or the constraint between the action and the state of the device is satisfied. Therefore, the constraint relationship analysis is realized by extracting the action, that is, for a certain execution action, checking the dependency relationship between the actions and further obtaining the dependency relationship between the action and the device state.
If the composition of the body

Therefore, the device dependency of the action is a conjunction process, in which case the

Test and analysis
In this article, the proposed model’s effectiveness is verified by two aspects: constraint model customization and constraint model analysis. The constraint model customization process is divided into the following two steps: (i) the definition of the basic set and the action set and (ii) the definition of the fuzzy relationship between two sets. The constraint relationship analysis process obtains the constraint relationship template by the conjunction operation based on the input action, the relationship matrix between the actions, and the relationship matrix between the action and the device set.
Constraint custom test verification
The route planning process is actually a process of continuously simulating aircraft movements’ execution by adjusting the position of navigation points and their properties. Make the corresponding action execution of the aircraft satisfy the constraints. The output of the route is described by A series of navigation points. Therefore, this study describes the state of the corresponding actions through the navigation points, and 20 basic actions are defined in the experiment. Figure 2 shows the constraint relationship between some actions. The yellow dots represent the dependencies between actions, and the gray dots represent the mutually exclusive relationship between actions. Taking the starting point Terrain Matching Start Point 18 (TMSP18) and the ending point Terrain Matching End Point 19 (TMEP19) of terrain matching as an example, according to the requirements of the constraint document, the aircraft cannot perform other maneuvers in the process of terrain matching, so between node TMSP18, TMEP19 and node climbing starting point (CSP3), climbing ending point (CEP4), turning starting point (TSP6), aiming point (AP7), turning ending point (TEP8), descending starting point (DSP10), and descending ending point (DEP11) have mutually exclusive relations (shown in gray). This dependency or mutual exclusion relationship can be visualized by mouse operating.

The constraint relationship matrix between navigation points.
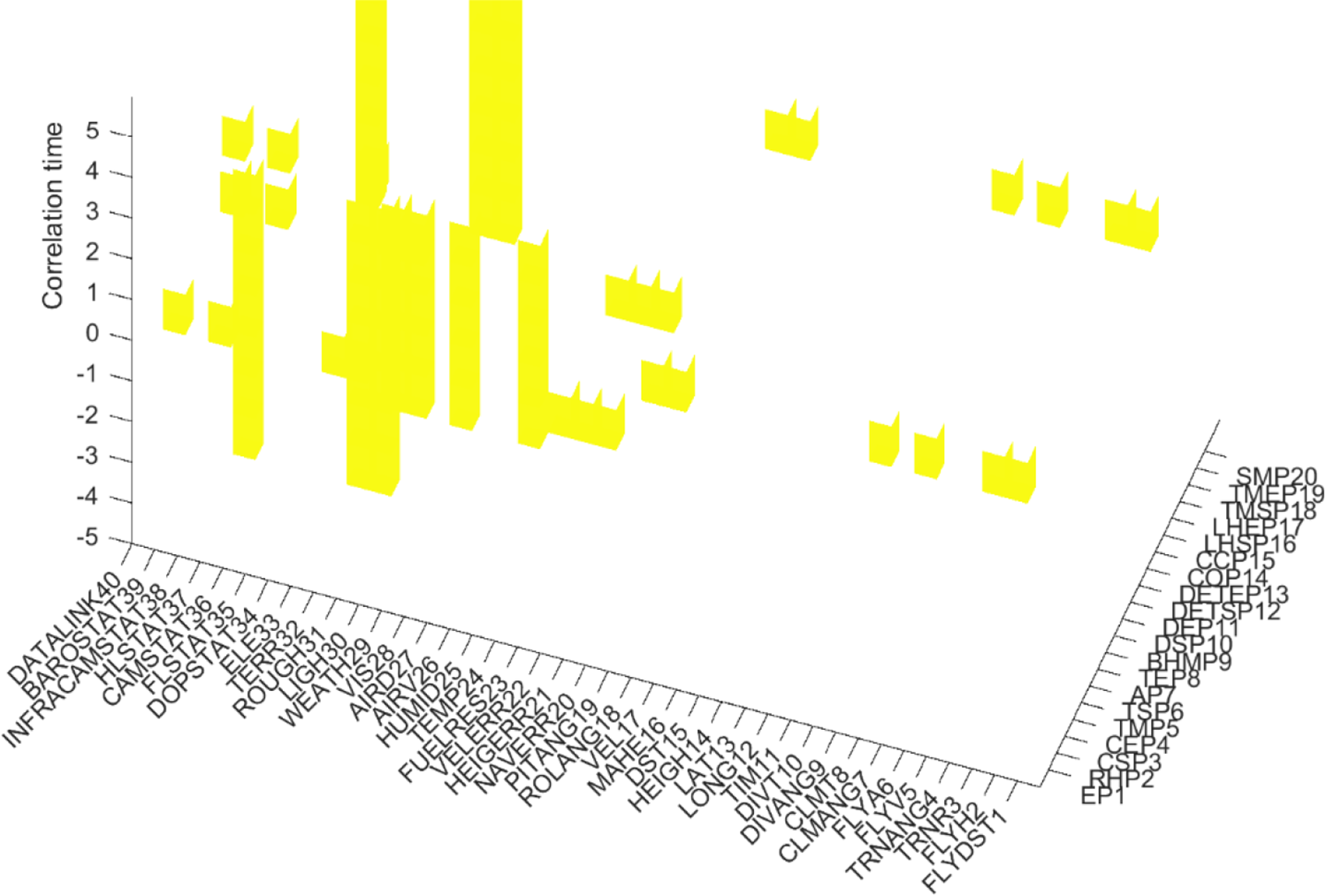
Figure 3 shows the 3D visualization of the navigation point constraint relationship. The constraint relationship between actions (between navigation points) may be uncertain, and this relationship is often maintained in a certain time range, such as the distance (time) constraint between two matching areas, possibly it may be expressed as “a matching area must be provided about every XX km,” in this case the distance constraint between the matching areas is actually fuzzy, and the relationship matrix appears as the uncertainty on the time axis of the matching area. It should be emphasized that the timeline has only a reference meaning for each action (navigation point), not absolute time, because each action has its own time scale attribute. We still take terrain matching constraints as an example. Before and after 500 m of terrain matching, no other flight maneuvers can be arranged. In Figure 3, between TMSP18, TMEP19, and CSP3, CEP4, TSP6, AP7, TEP8, DSP10, and DEP11 are mutually exclusive (negative correlation) in a time interval of about [−3, 3].

3D matrix of navigation points constraint relationship. 3D: three-dimensional.
Figure 4 shows the constraints between the partial actions and the device state (here contains the aircraft itself, the environment, the device, etc.), which defines 40 device collection elements. The matrix is a Boolean matrix and the yellow dots represent deterministic dependencies.

Relationship between navigation points state.
Figure 5 shows the 3D visualization of the navigation point state constraint relationship. The time axis also defines the temporal dependencies between the action and the device.
3D visualization of navigation point state constraint relationship. 3D: three-dimensional.
Constraint analysis test verification
Once the path planning constraints polychromatic sets and their relationships are designed, one can automatically check whether the input route meets the constraint conditions through computing. The corresponding constraint templates can be parsed for different types of navigation points by the operation rules of the polychromatic set. Then the navigation points of the input route can be checked one by one with the constraint templates. The constraint parsing is implemented by the conjunction operation of equations (9) and (10) after the input action (navigation point). Figure 6 shows the partial constraint analysis results for terrain matching, detection, launch, and radar altimetry. This analytical result can be used as a constraint template for route planning or route inspection. In this figure, FAXFattr is a 3D relation matrix, the first dimension is the element index of the device set, the second dimension is the index of the navigation point type set, and the third dimension is the relationship duration interval between navigation point and device. The element values in this relation matrix represent the device dependencies of navigation points. FAXFattrcell is a 3D device state constraint description matrix, each dimension of FAXFattrcell is defined as FAXFattr, but the matrix elements value point to device state description cells. Such as terrain matching constraint is given four constraints: the first constraint says: the value 5 of the second dimension of FAXFattr implies that this navigation point is the type of terrain matching point, nearby this point performing a terrain matching action, the action in time 6 (the third dimension index values) and the first dimension index 3-turning radius, 4-turning point, 7-climb angle, 9-dive angle, 18-roll angle, and 19-pitching angle have relations, its value is 1, means they are certainty relations. FAXFattrcell gives the state description of corresponding equipment (where 0 is defined as no turning, no climbing, etc.). The second constraint of terrain matching is the navigation point 5 of terrain matching has a deterministic relation with the terrain roughness-31 in time 2–8, and the specific terrain state is the terrain roughness must be greater than 3. These four constraints constitute the constraint standard template for terrain matching. When inspecting the constraint of a route, if a navigation point of terrain matching type is encountered, the template can be used to check if the terrain matching point matched. When a mismatch is found with the template, the inspecting result of failing and the reason are output.

Constraint analysis outputs.
Route inspection
In this experiment, we will test the route constrain inspection capability of polychromatic sets based method and compare it with existing route constrain inspection software base on route simulation and sampling method. 1 Figure 7 is a UAV route with multimission, the length of this route is 600 km, and the flight time is about 2000 s. In this route, two imaging tasks are designed for ground environment investigation. Usually, the route inspection method based on simulation and sampling has a large number of sampling points. The attributes of all sampling points are described with a fixed structure, so to save the storage space of route sampling points, many important attributes cannot be recorded. At the same time, the common definition of device set and its attributes cannot describe the complex relationship between these device sets. However, in the polychromatic sets method, the navigation points or task execution points are defined as action sets, with the action execution constrain template, one can directly inspect whether the navigation points match the corresponding constrain template, we need not to simulating and sampling the input route. This method can express more complex constrain relations and can inspecting more task point types.
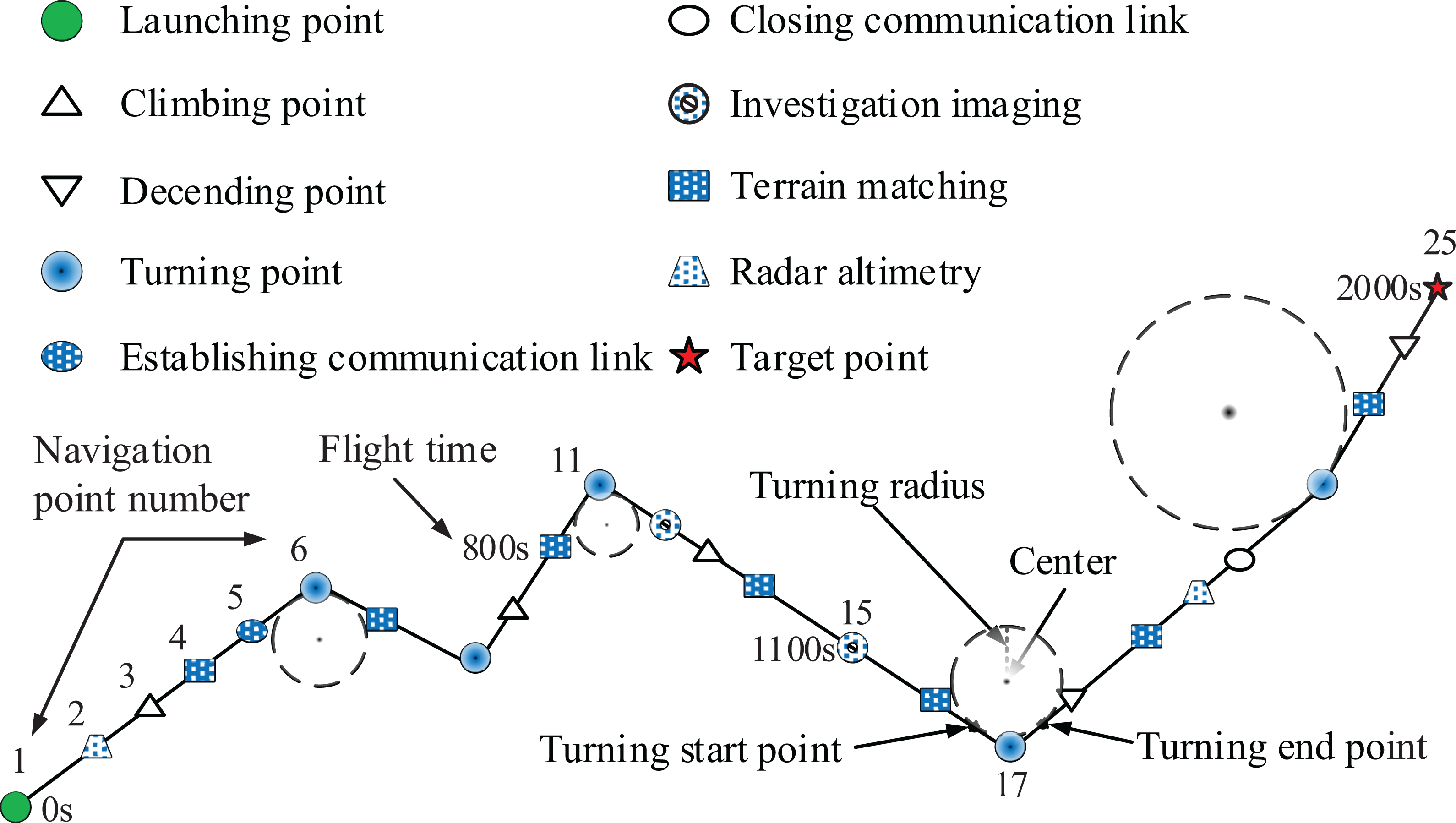
A UAV route with multimission. UAV: unmanned aerial vehicle.
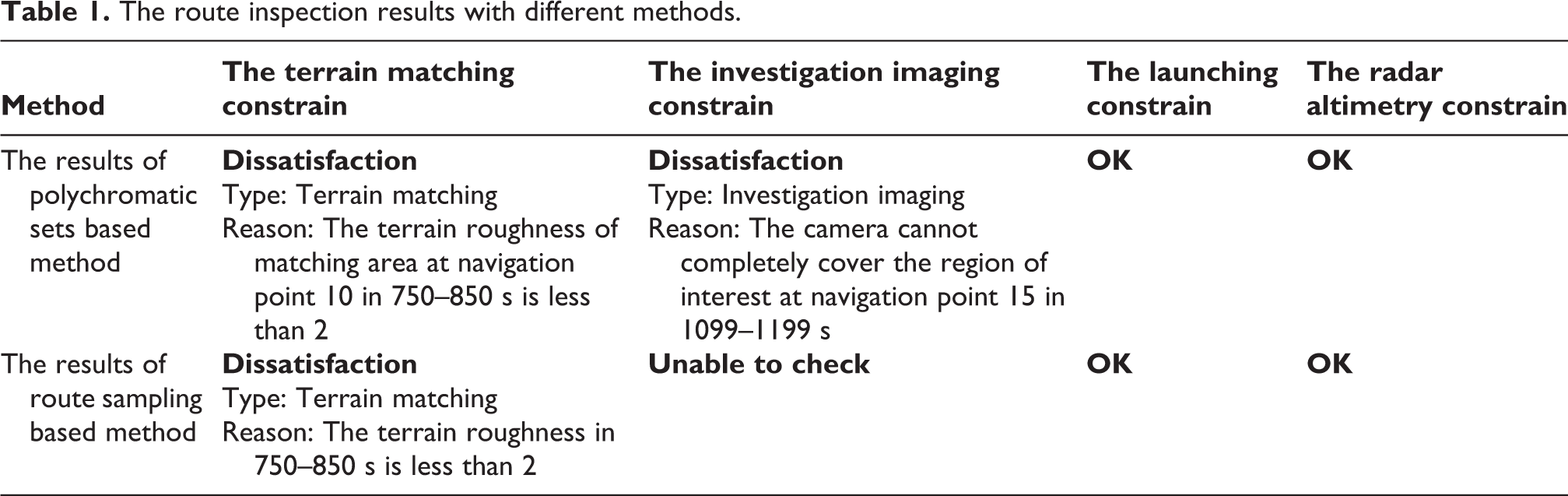
Table 1 presents the inspecting results with the two methods of the route in Figure 7. It can be seen that the new method can inspect all four constraints mentioned above, and the results are consistent with the above analysis. The former inspection method can inspect three of four constraints, and the results are correct, but it cannot inspect the second constraint about investigation imaging.
The route inspection results with different methods.
Analysis and conclusion
In this article, a general constraint model for route planning is given by set, set dyeing, and the relationship among sets. The constrained template is obtained by set operation, which theoretically guarantees the universality of the constraint model establishment and the constraint analysis process. Especially in the constraint customization process, intuitive and interactive constraint customization can be achieved through 3D visualization technology. By introducing fuzzy sets and fuzzy relations, the uncertain constraints can be described, and the scope of application of the constraint model is further expanded. The constraint analysis process solves the problem of the use of constraints, and the set operation can quickly reconstruct the constraint template of the specified action. Then we further apply the constraint model to the route planning and route constraint inspection system.
The traditional route planning constraint model is designed for specific aircraft and specific optimization algorithm, and the constraints considered are not complete. The planning software designed based on such model is less universal. The polychromic sets based route planning constraint model in this study overcome the above difficulties, not only makes the constraint customization process more convenient but also enables the inspection software to deal with more types of constraints of input route.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China under grant no. 61806100 and the Natural Science Foundation of Jiangsu Province under grant no. BK20170914.