
Abstract
We present a deliberative trajectory planning method to avoid collisions with traffic vessels. It also plans traversal across wavefields generated by these vessels and minimizes the risk of failure. Our method searches over a state-space consisting of pose and time. And, it produces collision-free and minimum-risk trajectory. It uses a lookup table to account for motion uncertainty and failure risk. We also present speed-up techniques to increase performance. Our wave-aware planner produces plans that (1) have shorter execution times and safer when compared to previously developed reactive planning schemes and (2) comply with user-defined wave-traversal constraints and Collision Regulations (COLREGs)
Keywords
Introduction
Automated trajectory planning is a prerequisite for realizing autonomous unmanned vehicles. Collision avoidance with static and dynamic obstacles under perception uncertainty are basic requirements for generating useful trajectories. The focus of this article is a framework for deliberative trajectory planning in the presence of large semipermeable dynamic obstacles and motion uncertainty. Typically, trajectory planning for unmanned vehicles is decoupled into two parts. First, a path planning problem is solved to obtain a tentative path, ignoring dynamic obstacles. Then, a motion planning problem is solved, this time considering dynamic obstacles, using the tentative path as a reference to yield a final trajectory. The motion planning problem is conventionally solved using reactive planning approaches like generalized velocity obstacles 1 and velocity tuning. 2 –4 These methods work well when the dynamic obstacles are small, and the introduction of these dynamic obstacles does not introduce drastic differences between the true optimal path and the tentative path. Thus, in the case of small dynamic obstacles, a reactively planned trajectory is likely to be close to the true optimal trajectory while following a tentative path computed while ignoring small dynamic obstacles. However, in the case of large dynamic obstacles, it is generally likely for reactively planned trajectories to be highly suboptimal. For instance, on the one hand, reactively avoiding (i.e. going around) large dynamic obstacles may introduce unnecessary slowdowns and increase execution time. On the other hand, punching through semipermeable dynamic obstacles may decrease execution time but increase the risk of failure and collisions. Therefore, handling large semipermeable dynamic obstacles requires deliberative planning that can carefully balance the competing priorities (i.e. reduce execution time, reduce failure/collision rate). For example, reducing failure/collision rate should be the first priority. When it is possible to have zero failures/collisions, reducing execution time is the next priority. In some situations such as those that arise in the marine robotics domain, 5 navigation around or through large permeable dynamic obstacles is required (Figure 1).
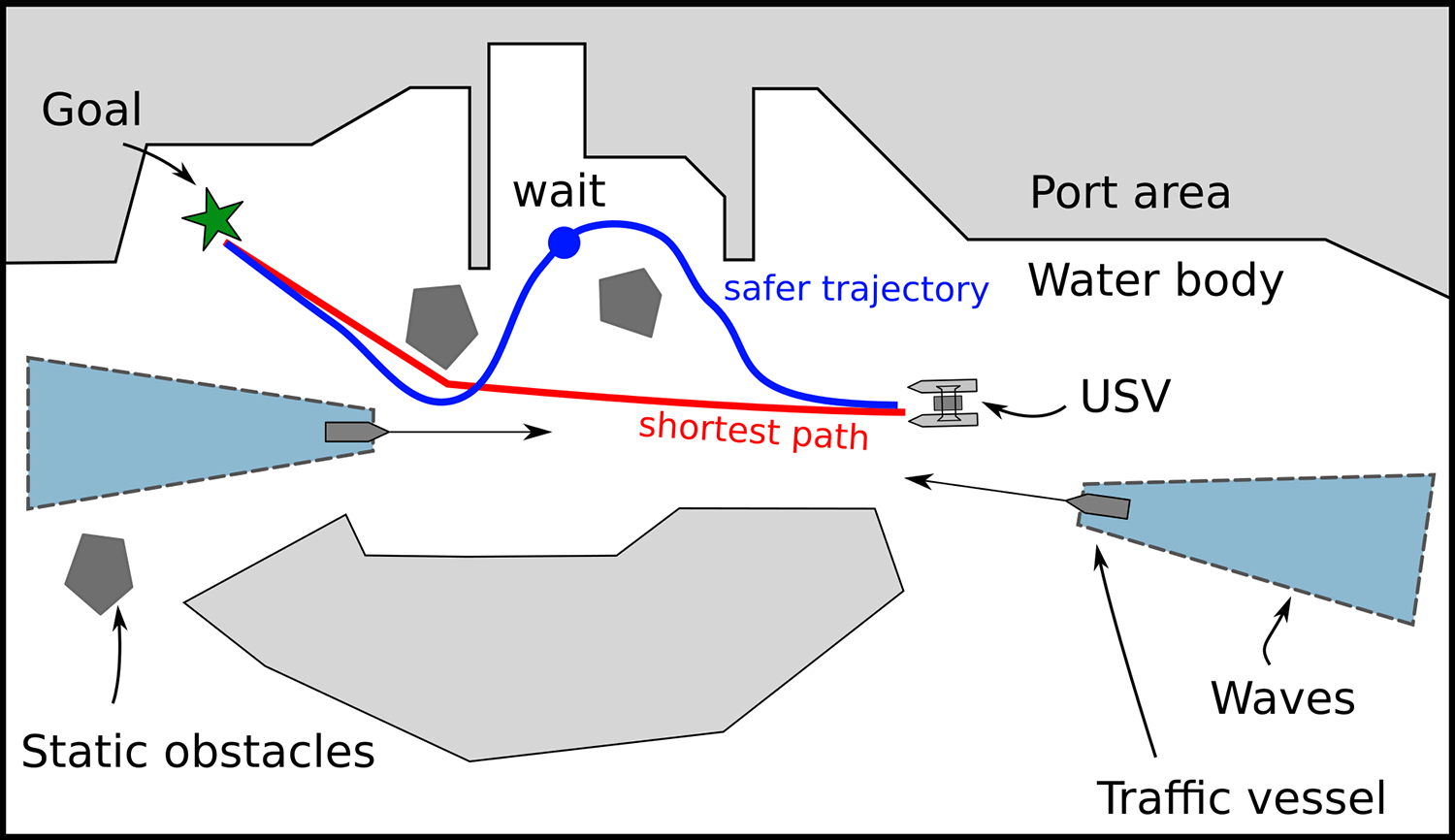
Handling large dynamic obstacles requires deliberative planning.
The wavefield generated by a marine vessel is a good example of a large semipermeable dynamic obstacle which can either be traversed or be avoided altogether. In a majority of practical scenarios, unmanned ground vehicles exhibit significantly less motion uncertainty compared to unmanned surface vehicles. Trajectory planning for unmanned ground vehicles is a well-studied problem and in the recent years, significant progress has been made in solving it using a wide variety of methods such as graph search, 6 stochastic tree search, 7,8 Markov decision processes (MDPs), and optimal control. 9,10 Graph search methods like state lattice search are popular global planning methods due to optimality guarantees and efficiency in large environments. Unmanned surface vehicles exhibit more motion uncertainty due to significant external disturbances like waves and winds. 11 Collision avoidance is more challenging under these circumstances and it involves not only staying a safe distance from static obstacles and dynamic obstacles but also following COLREGs. COLREGs is a set of maritime navigation rules set by the International Maritime Organization (IMO) to minimize collisions and confusion among marine vessels. The effects of motion uncertainty are pronounced in smaller Unmanned Surface Vehicles (USVs) as they are more susceptible to wave disturbances. An MDP framework can rigorously handle motion uncertainty for environments with static obstacles. It requires a state transition model of the USV. A state transition model to account for wave disturbances is developed in Thakur et al. 12 for use in path planning amid static obstacles. In addition to ambient sea waves, wavefields generated by the motion of dynamic obstacles over the sea create yet another source of motion uncertainty and adds to the number of failure modes. The wavefield induces external disturbances that vary both spatially and temporally. Trajectory planning for USVs in the presence of dynamic obstacles needs to consider a state vector that includes position, orientation, velocity, and time. For time-varying environments, the regular MDP can be converted to a time-extended MDP. 13 Time-extended MDP over high-dimensional state spaces are complex and computationally prohibitive. 14,15 On the other hand, performing a search over a lattice of motion primitives requires careful collision risk assessment and heuristics tuned for dealing with dynamic obstacles in the presence of significant motion uncertainty. Large-scale partially observable Markov decision processes (POMDPs) can be approximately solved only in a reactive online fashion using methods developed in the literature. 16,17
This article builds on the work in Rajendran et al. 18 As in Rajendran et al., 18 we only focus on the environmental disturbance caused by wavefields, and hence, the effects of wind and water currents are not considered. In Rajendran et al., 18 dynamic obstacle heuristics (DOHs) was used requiring extensive precomputation for traffic vessels of different sizes and velocities using off-line simulations. This needs to be done for a planning scenario before the search can be performed. Computing lookup tables takes considerable amount of time. Therefore, this method cannot be used in practice in new scenarios. The method described in this article overcomes that limitation and uses online heuristics instead of precomputed lookup tables. Both methods lead to almost identical paths.
The new contributions of this article are the following. (1) We adapt the idea of space–time heuristics 19 to overcome the limitations of DOH used in our exploratory work. We also incorporate COLREGs rules into it to solve more difficult problems involving many dynamic obstacles. (2) We investigate the behavior of our method in four new maps that capture the types of environments the USV may be exposed to. (3) We characterize the behavior of our method under different operating conditions involving varying perception uncertainty, varying number of dynamic obstacles, and varying wavefield parameters.
Related work
Trajectory planning
Precomputed state-transition probabilities over differing sea states are used in Svec et al. 11 to handle motion uncertainty. Incorporating perception uncertainty turns MDPs into POMDPs. In Agha-mohammadi et al., 20 the probabilistic road map idea is extended for belief spaces using MDPs and feedback controllers. Feedback controllers are designed to drive the agent into a sampled state in belief space called a Feedback Information Road Map (FIRM) node. Then, through the use of a precomputed policy for the MDP over FIRM nodes, a sequence of controllers that drive the agent from the initial state to the final state is obtained. This way POMDPs become computationally tractable for problems of larger scale involving only static obstacles. However, it is hard to augment these methods to work in domains with spatiotemporal disturbances. In Blackmore et al., 21 chance constraints are used in the context of static obstacle avoidance, guaranteeing prespecified failure probability bounds. Belief-space (pose × covariance space) search is used in static obstacle environments to incorporate motion uncertainty and generate plans that expedite arrival time and minimize final pose error covariance. 22,23 These works do not include dynamic obstacles. Terrain variation causes trajectory tracking error. The error characteristics of the controller are considered in the planning method proposed in Mellinger and Kumar 24 where tracking error is modeled as a function of terrain. The probability of successful navigation through the terrain is incorporated into the cost function. We take inspiration from Mellinger and Kumar 24 and introduce the notion of time-varying terrain. We also account for risk of failure through a robot-reliability model. 25 We also use methods in Greytak and Hover 26 to model trajectory tracking uncertainty and utilize low-level trajectory tracking error characteristics.
Trajectory and wave prediction
Accurate prediction of trajectories of moving obstacles is a fundamental requirement for deliberative trajectory planning. Several threads of research work are in progress to provide predictions. In the marine domain, automatic identification system (AIS) data 27 can be used for coarse grained trajectory prediction. AIS is susceptible to communication interruptions. 28 However, when it is used in conjunction with Gaussian Process Regression (GPR) based trajectory prediction methods, 8,29 –31 it can produce good estimates for long-term planning purposes. 32 Waves generated by moving vessels can be forecast up to 180 s into the future using radar systems. 33,34 We assume such a system is available in the sensor suite to aid deliberative planning.
Preliminaries and problem formulation
Vehicle model
For trajectory planning purposes, we use a simplified kinematic vehicle model to describe the motion of the USV

The USV pose is

Motion goal set with
Traffic vessel profiles
A traffic vessel profile (TVP) is a collection describing the geometry and state of a traffic vessel underway. These data are generated by a trajectory prediction system.
31
A typical traffic vessel profile TVP
i
made up of the following quantities: (i) predicted trajectory
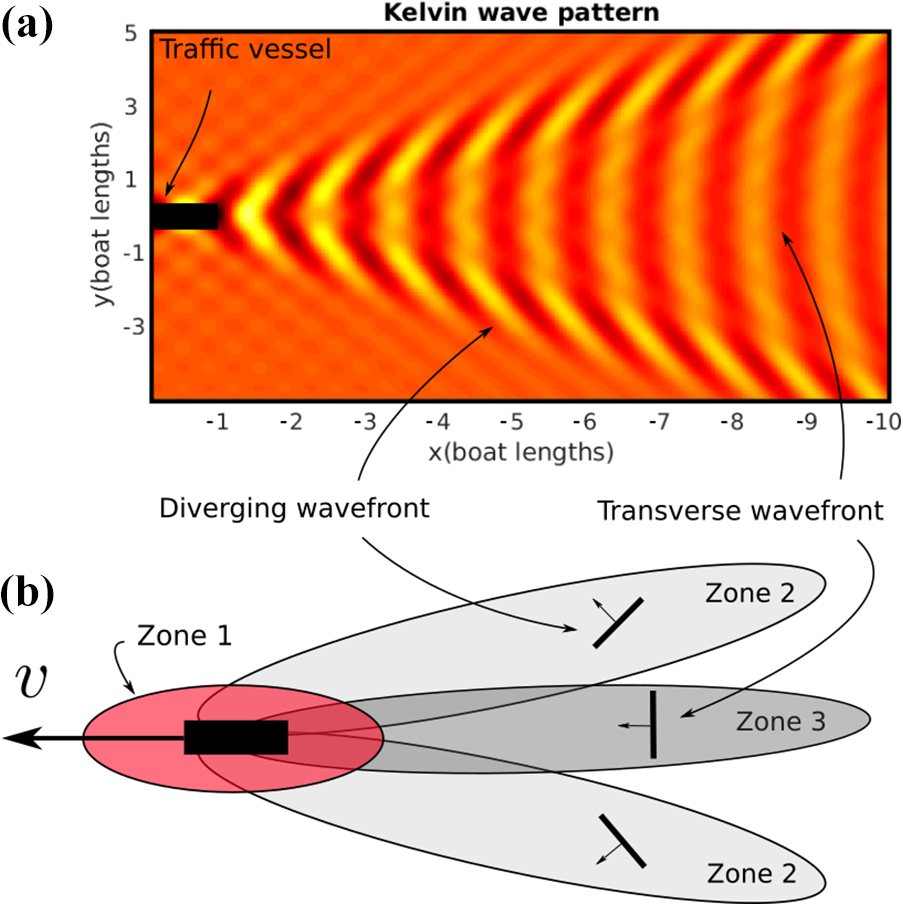
(a) A wave pattern (Kelvin wave) for a traffic vessel moving westward, operating at hull Froude number 0.5 and waterline boat length 10 m. Crests are shown in yellow and troughs are shown in red. Two local wave fronts near two instances of the USV are labeled 1 and 2, (b) a simplified wave pattern consisting of zones with different local wave fronts.
Environmental disturbances
We assume environmental disturbances are specified parametrically through a parameter vector defined for each state in the state space as in Figure 4. For example, at point D,

An illustration showing how parameter vector γ is defined over a trajectory at a few characteristic query points A, B, C, and D.
In this work, TVPs and environmental disturbances are modeled with the help of basic wave models. In practice, the wave interaction is more complex and estimation of wave parameters is required. With recent advances of computer vision and deep learning, it is possible to construct a method of wave parameter estimation from vision. This method does not have to be very accurate for use in a failure assessment module.
Failure model
We seek to model failure probabilities using a robot reliability model.
25
The probability that a robot remains functional up to time t is given by

the ratio of number of failures to the total number of attempts within an observation time window. Developing a precise model of the failure (i.e. capsize) of the USV in varying sea-states and waves is difficult. It involves allowing the robot to fail in the process of counting the number of failures within an observation time window. This is not practical. A safer alternative is to measure how close to failure the robot got to when exposed to a certain local disturbance. In this work, a local disturbance is described parametrically as the tuple consisting of sea-state and proximity to a vessel. Two sea-states are considered calm (undisturbed waters) and rough (choppy waters due to wind conditions/multiple traffic vessels). And, proximity to vessel is a Boolean flag that is determined by whether the USV happens to be in any of the wavezones around the traffic vessel (see Figure 5). If the USV is in proximity to a vessel, then the wavezone is also part of the local disturbance parameter. USVs typically have certain design limits such as roll limits or pitch limits. We define a failure event as an event when any of these design limits is exceeded. Thus, given a set of trajectory samples

Determining wave incidence angle and relative position from a traffic vessel.
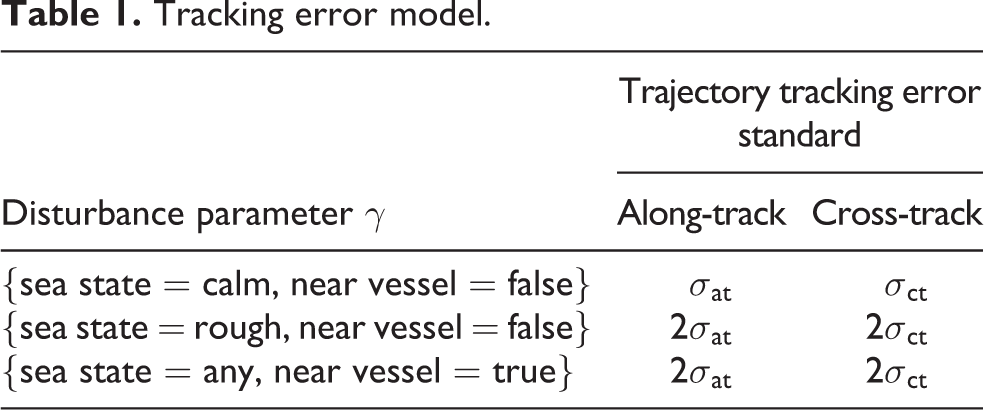
Tracking error model.
Mean-time-between-failure (MTBF) model.

Problem formulation
Approach
The problem is an implicit graph search problem. We use the Theta* graph search algorithm 39 to solve it. We describe the essential aspects of the Theta* graph search implementation.
Node expansion and cost functions
A node n is a tuple defined as
Collision cost calculation for a trajectory between a parent node and a child node.
Obtaining tracking error and failure model parameters
Local environmental conditions (such as local sea state) and being in the vicinity of a moving vessel affect the trajectory tracking performance of the USV as it moves along a reference trajectory. These conditions are encoded into

(a) Error envelope of trajectory tracking defined by σct and σat for a trajectory starting at

Wavefield experiment setup.
Determining tracking error parameters
As for the tracking error model, when the query state lies over calm waters and is not in the vicinity of any traffic vessel, we use nominal values for tracking error parameters. Otherwise, the tracking error parameters are doubled.
Determining MTBF
Since traffic-free calm waters are very safe,


Here
In this work, the MTBF model was generated using a combination of simulation and physical experiments. These were done in an off-line manner. In future, these can be performed in an online manner as well. We envision that it will work in the following manner. Initially, we assume a conservative MTBF model. Using this conservative MTBF model, the USV can navigate safely. And, based on an explore-exploit tradeoff, we can explore unknown wave conditions and update MTBF model appropriately using a Bayesian inferencing scheme. This will enable exploring new wave conditions while safely updating the MTBF model parameters.
Cost assessment
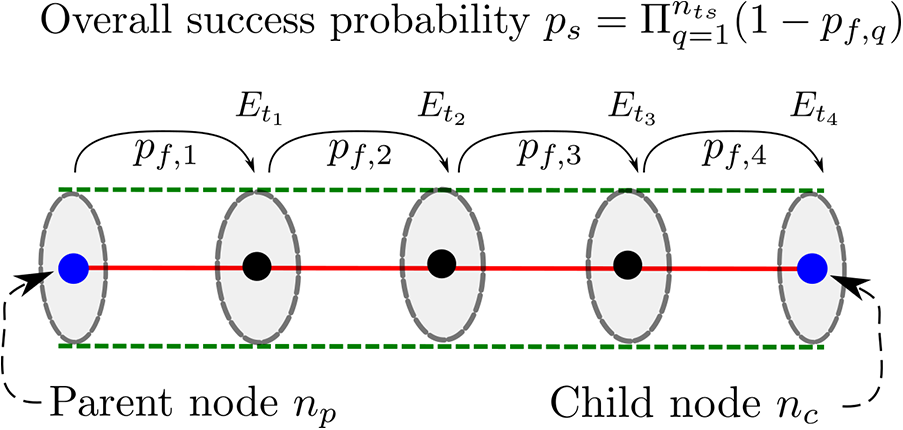
Having determined the tracking error and the MTBF parameters using

where
For each ellipse

where Mq
is computed by averaging the MTBF values over a uniform set of points in
Thus, the probability of success imparted to the child state is

the time cost is
Accounting for perception uncertainty
To account for the perception uncertainty in the measurement of the TVPs, a Monte Carlo sampling scheme
44
is utilized. The Monte Carlo sampling approach is used as it is a general method and amenable to parallelization. In the previous section,
Speed-up techniques
We describe some techniques to improve the search performance.
Static obstacle heuristics
The cost function includes the time duration of moving from one position to another (i.e. ct
). And, static obstacles do not move between planning cycles. In such a scenario, a time-to-goal map (also known as arrival time map) is beneficial. This map is termed Static Obstacle Heuristic (SOH) and it stores the lower bound on the time cost of going from any position in the workspace to the goal position g. This map is computed using the fast marching method (FMM) to approximately solve an Eikonal equation.
45,46
The level sets of the solution of the Eikonal equation correspond to the frontiers of a wave emanating from the goal position. The speed of the wave is set to the maximum speed of the USV. As the frontier (i.e. the open set in Dijkstra’s algorithm) bends around corners, the time-to-goal estimate is more informative than the naive Euclidean distance-based estimate. The raw time-to-goal values given by the FMM are naturally not admissible unless they are scaled down by a factor that depends on the discretization used in computing the map.
6
After the appropriate scaling is applied, each cell in this map contains an underestimate of the time to reach the goal from that cell location. This value is used to compute an estimate of ct
to be accumulated until the goal is reached. For a given query position s, a heuristic value
Space–time exploration heuristics
Developing admissible heuristics to handle dynamic and static obstacles is challenging and can often be just as hard as the original problem. However, by relaxing the original problem, effective heuristics can be generated. We follow Chen et al.
19
and drop to 3D configuration space by excluding ψ (i.e. we use only


(a) Generation of heuristic space–time path, (b) an example of a heuristic path τ connecting start and goal points generated by a sequence of cones.
This cone represents a collision-free volume in the 3D configuration space. To explore the space, the idea is to grow new cones at the top face of cone Ci and continue this process until the goal region is reached by a certain cone. In this way, we generate a sequence of overlapping cones forming a collision-free volume in configuration space, which connects the initial state and the goal region.
Nodes are described using tuples of the form
Heuristic space–time path


Adaptive motion goal set
To accelerate the Theta* graph search, the resolution of the motion goal set r and ndirs is modified depending on the distance of the parent node position from moving vessels and static obstacles. We use a precomputed Euclidean distance transform to query the shortest distance from any of the static obstacles. Shortest distance from any of the traffic vessels is computed online.

In open waters, longer strides are made and the progress toward the goal is faster.
Selection of parameters
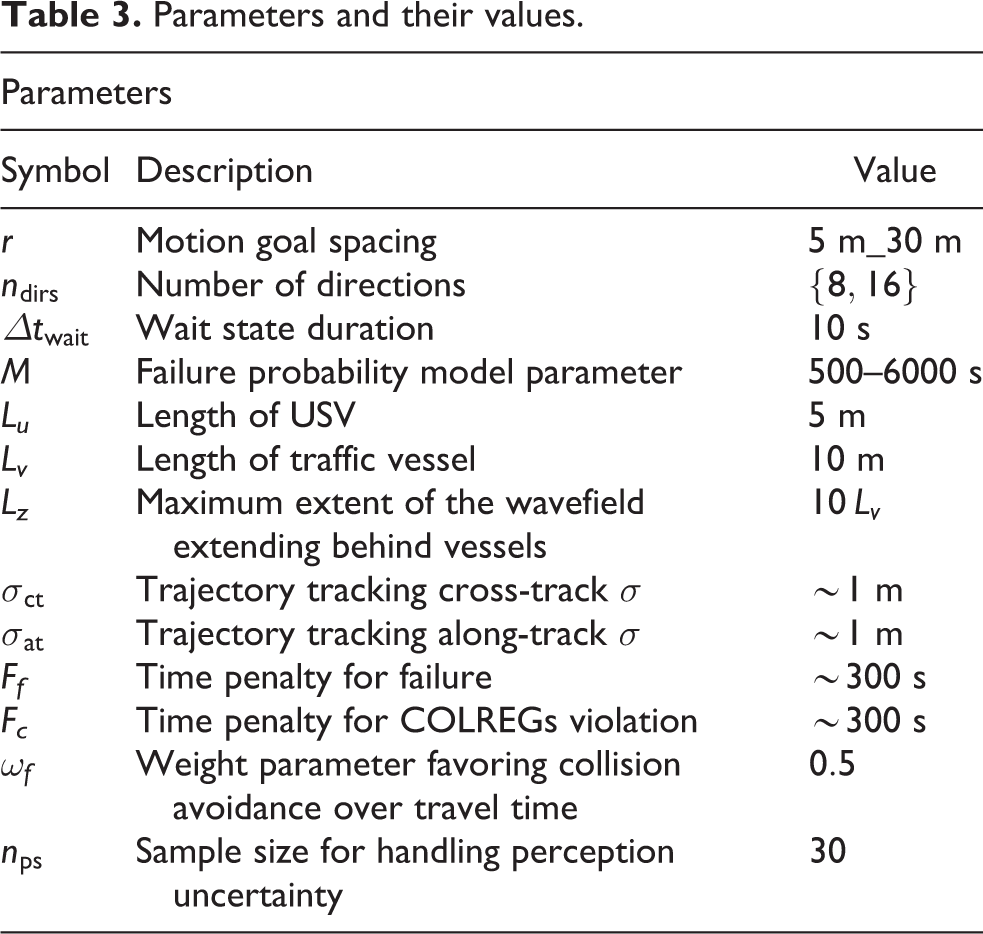
Table 3 summarizes the list of parameters used in the planner. These parameters are chosen by the user.
Parameters and their values.
User preference parameters
User preference parameters balance safety and performance. The failure penalty Ff can be chosen as the duration of time required to dispatch a functional USV in lieu of the failed USV. This choice roughly captures the real time impact a failed USV will cause. The COLREGs violation penalty Fc should be much smaller than Ff to favor COLREGs noncompliant trajectories over trajectories that lead to a collision or failure. The extent to which large time delays are accepted to minimize failure is controlled by ωf. The closer to ωf is to 1, the more conservative the trajectories are in terms of avoiding failure.
Planning speed parameters
Results
We implemented the wave-aware trajectory planner (WA-TP) in MATLAB on a PC with Intel Xeon 3.5 GHz CPU and 32 GB RAM. A set of simulation experiments were conducted. We discuss the experiments and their results below.
Simulation experiments
We generated four different maps to test the trajectory planner. Traffic vessels at t=0 are shown in Figure 10. The USV and traffic vessels were simulated using three degrees-of-freedom dynamic model as in Klinger et al.
47
In the USV pose observations used for planning, noise was added following the distribution in equation (6). The response of traffic vessels to the motion of the USV is not simulated. Only the USV is allowed to react to the traffic vessels. Some of the important parameters used are map size = 600 m × 600 m, USV length =

Illustration of test maps. Magenta arrows on traffic vessels indicate the direction of motion. Sampling regions for start and goal poses are also shown. An example of a planned trajectory is shown as a red curve. The colored dots in front of the USV represent the set of velocity vectors that considered by the velocity obstacle avoidance method.
Planning stack configurations.

G-PP: global path planner; C-VO: conservative velocity obstacle; VO: velocity obstacle; WA-TP: wave-aware trajectory planner; C-TP: conservative trajectory planner.
The configuration C-TP + VO follows the conservative trajectory generated by C-TP and avoids traffic vessels using regular VO.
We tested random start and goal poses sampled from the sampling regions, as shown in Figure 10. For each sampled pair, we collected aggregated performance metrics for 20 runs of different configurations of the planning stack. Table 5 presents the execution time, collision count, and success probability. For each run, normalized execution time is computed relative to the execution time of WA-TP. Success probability is computed after each run by using the executed trajectory as in Cost assessment. The results show that WA-TP+VO generally reduces execution time with the exception of M1. However, G-PP + C-VO incurs collisions in M1 as planning without the time dimension results in situations where collision is inevitable. This is also the case in M3 as well. Going into the busy channel just because it is a shorter route to the goal is dangerous and time-consuming. Furthermore, the success probabilities are greatly reduced in G-PP + C-VO as the USV traverses wavefields without proper alignment. On the other hand, C-TP + VO plans longer routes to prevent collisions and ensure higher success probability. This results in increased execution time compared to WA-TP + VO. This is especially evident in M3 where the USV has to cross a busy channel to reach the goal point. C-TP + VO waits for a completely clear channel, whereas WA-TP + VO waits for an opportune moment where the wavefields are traversable.
Comparison of performance.

G-PP: global path planner; C-VO: conservative velocity obstacle; VO: velocity obstacle; WA-TP: wave-aware trajectory planner; C-TP: conservative trajectory planner.
Sensitivity to speed-up techniques
The planner was invoked in the test maps (M1, M2, M3) enabling and disabling subsets of these techniques to study the effects of speed-up techniques. Twenty start and goal points were randomly sampled in the sampling regions corresponding to each map. The baseline configuration of the planner uses Euclidean distance-based time heuristic (i.e.
Impact of speed-up techniques on performance.

SOH: static obstacle heuristics; STEH: space–time exploration heuristics; AMGS: adaptive motion goal set.
Sensitivity to MTBF parameter
We illustrate the effects of changing the MTBF parameter of the failure model summarized in Table 2. Figure 11 shows the initial configuration of USV and traffic vessels in the islands map. Traffic vessels were initialized to speeds between 1 m/s and 2 m/s. The USV was set up to use WA-TP + VO and commanded to cross the busy channel (Figure 11). In this experiment, the parameter controlling the danger level of the wave region (i.e. MTBF value Mt
) is changed. Two different values of Mt
are used to simulate two different levels of danger. In Figure 12(a), the wavefields are made to be dangerous by assigning a lower MTBF parameter (

Scenario to illustrate the effects of changing the MTBF parameter Mt . USV is positioned at the start point and commanded to reach the goal point. The colored dots in front of the USV represent the set of velocity vectors that considered by the velocity-obstacle avoidance method. MTBF: mean-time-between-failures.

(a) Case
Sensitivity to number of dynamic obstacles and perception uncertainty
We also studied how the algorithm scaled when the number of dynamic obstacles was varied. We used the map M4 and varied the number of dynamic obstacles. Random start and goal poses were sampled from the sampling regions. We used this random sampling scheme to ensure the USV interacts with the dynamic obstacles. Figure 13 shows the mean planning time increasing roughly linearly in the number of dynamic obstacles. We used the scenario in Figure 14 to study how our method performs under different levels of perception uncertainty. Figure 15 illustrates the different behaviors exhibited by our method. In Figure 15(a), the USV stops at the mouth of the channel waiting for the traffic vessel to clear the channel. This behavior is due to the high perception uncertainty associated with the sensing of the traffic vessel. Entering the channel in this situation is a risky move. If the channel is entered without an accurate state estimate of the traffic vessel, a collision might be inevitable when the USV is unable to maneuver around the traffic vessel. This behavior is avoided. In Figure 15(b), the USV enters the channel and keeps to the right lane while the traffic vessel is underway. This behavior is due to the low perception uncertainty associated with the sensing of the traffic vessel. The USV avoids the traffic vessel and also complies with COLREGs.

Sensitivity to number of dynamic obstacles.

Scenario to illustrate the effects of perception uncertainty.

(a) Case: High perception uncertainty. For
Physical experiments
Experimental setup
A set of physical experiments using a 16 feet WAM-V USV at North Lake, Hollywood, Florida (see Figure 16), was performed to verify the effectiveness of the proposed approach. In place of real static and dynamic obstacles, we introduced virtual obstacles. They were given to the navigation system in lieu of the perception subsystem. This was done to perform the experiments without risking the loss of the WAM-V platform.

Physical experiment setup.
Figures 17 and 18 show the scenario and the trajectory obtained by WA-TP and C-TP. In these scenarios, dynamic obstacles were moving at constant speeds between 1.0 m/s and 2.0 m/s. During experiments, there was gentle south-easterly winds ranging between 10 and 12 KTS. From Table 7, the execution times are observed to have reduced by as much as 25.1% under the proposed approach. A video clip showing some simulation and physical experiments is located at https://youtu.be/_VGxb4nRUwU.
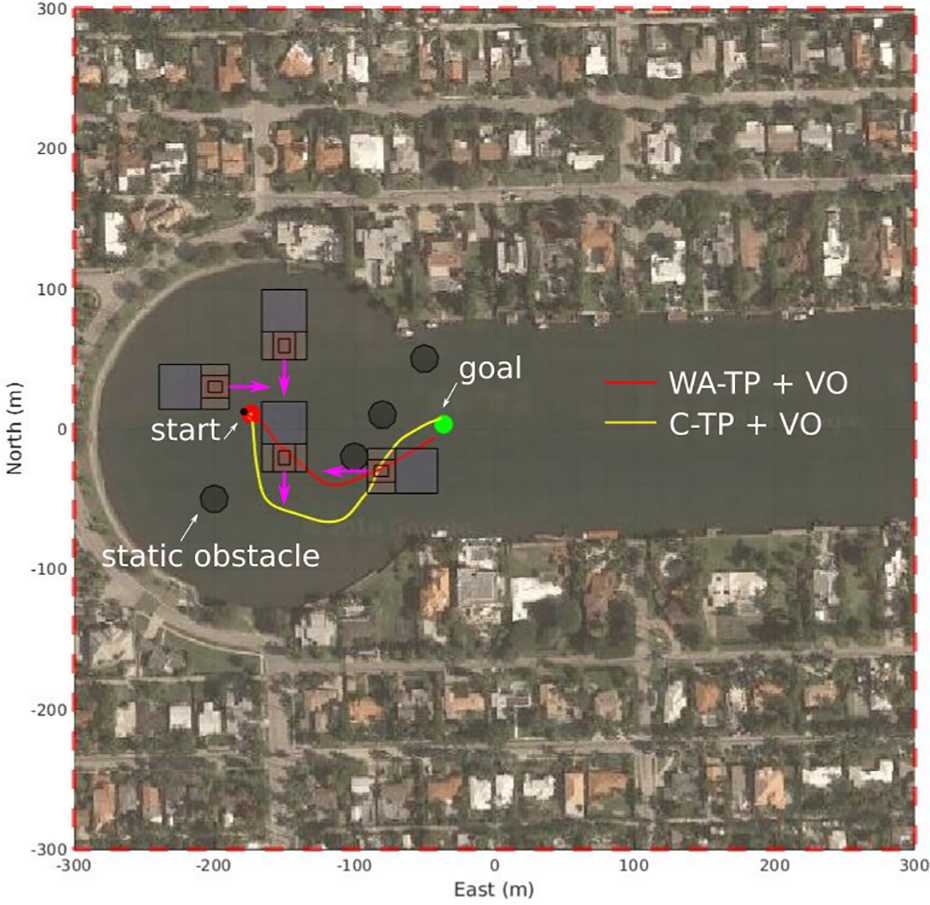
A set of trajectories obtained in scenario P1 comparing wave-aware trajectory with a conservative trajectory.

A set of trajectories obtained in scenario P2 comparing wave-aware trajectory with a conservative trajectory.
Comparison of execution time.

Conclusion
Our approach plans trajectories over long distances while avoiding static obstacles and traffic vessels. It also avoids waves generated by them. Our approach executes these trajectories faster and safer. The execution times are reduced by at least 25% when compared to other methods. The proposed approach is able to react safely to varying levels of perception uncertainty. The incorporation of wavefields into the planning process improves the success probability of the planned trajectory. By using heuristics and adaptive motion goal sets, the planning effort and time has been reduced. However, further reduction is required for practical deployment in congested harbors. Harbors have speed limits ranging between 1.8 m/s and 5 m/s and reacting to traffic vessels potentially moving at those speeds requires faster planning times than possible by the current MATLAB implementation. In this work, simplifying assumptions such as trajectory of traffic vessels, the shape and size of the wave regions were made. However, these aspects of the planner can be changed and tuned for specific applications that are not necessarily in the marine domain. The heuristics and evaluation of transition cost under motion/perception uncertainty remain applicable in other domains where there are large semipermeable dynamic obstacles. There are a few potential directions of future work. The reactive behavior of traffic vessels to the actions of the USV was not captured in the planner. Furthermore, wind and current effects were not included in the planning process. These effects can be included when good estimates of the currents and wind direction are available. This will require development of new heuristics. Based on the assumption that multiple traffic vessels may not come very close to the USV, the interaction of wavefields by multiple traffic vessels was ignored. Including this interaction in the planning problem is essential in very congested environments. An optimized C++ implementation can be done for a faster planning time by utilizing GPU and multicore frameworks to perform the computations in the Monte Carlo scheme used for failure probability computations.
Footnotes
Authors’ note
Opinions expressed are those of the authors and do not necessarily reflect the opinions of the sponsors.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Science Foundation (Grant No. #1634433 and #1526016).