
Abstract
This article addresses a problem in standard broadcast control framework which leads to an unstable solution in a certain motion-coordination task. First, the unstable phenomenon in a certain motion-coordination task is illustrated using standard broadcast control framework. This issue calls for modification to the standard broadcast control framework by limiting the norm of the update vector of robots’ positions into a constant value. Then, we demonstrate that the modified broadcast controller achieves the convergence with the probability of 1. Finally, we illustrate in numerical simulations that the modified broadcast controller can effectively solve the instability issue and also may improve the convergence time as compared to the standard broadcast controller.
Keywords
Introduction
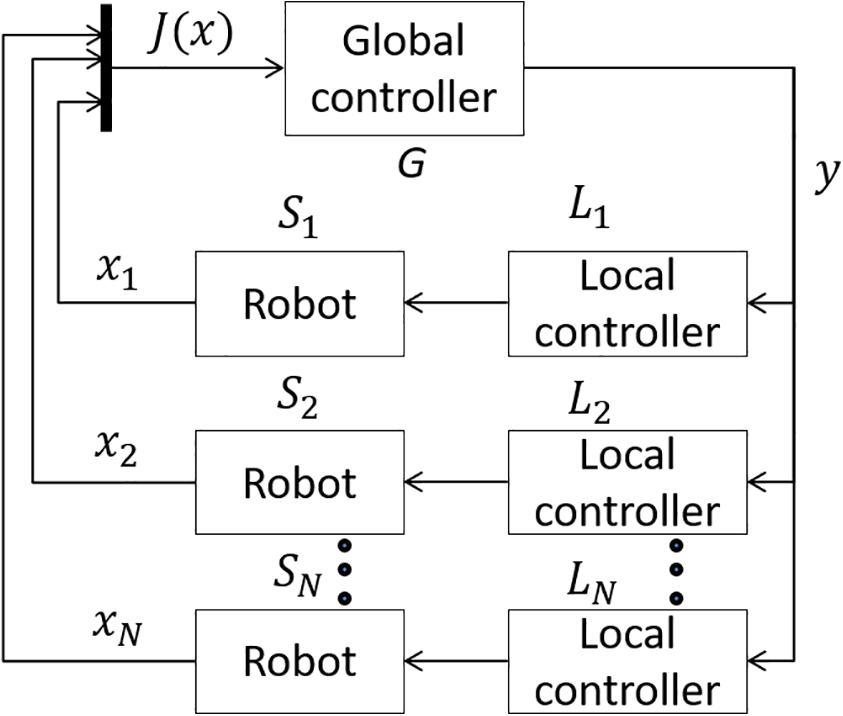
Nowadays, multi-robot systems are of a great interest among researchers, compared to individual systems. This is because multi-robot systems can effectively carry out more tasks. Previously, many researchers were focusing on robot-to-robot communication framework to solve various multi-robot coordination problems. Instead of using robot-to-robot communication framework, some researchers explored a new idea to solve multi-robot coordination problems by considering one-to-all communication framework or better known as broadcast control framework. The example is illustrated in Figure 1. This one-to-all communication framework means that the same signal is sent indiscriminatingly to all robots. The consideration of this broadcast framework has been motivated by its advantages, such as practical motion-coordination task for large-scale multi-robot systems such as swarm robot that does not need robots’ identification, and consuming minimal energy during execution task execution. Readers may refer to Ismail and Sariff 1 for more examples of multi-robot applications.

One-to-all robot communication framework for multi-robot systems.
The idea of broadcast control framework was originally inspired by Ueda et al., 2 where such framework had been used to control a bio-inspired actuator system of many cellular units. A number of results regarding the broadcast control frameworks have been obtained. 3 –5 Aside from biological system, the idea of broadcast control was also implemented in controlling a group of multi-agent systems 6 –14 and recently, to control connected and automated vehicles at merging highway, 15,16 unmanned aerial vehicles, 17 as well as radar surveillance system. 18 In particular, a standard broadcast control framework was synthesized in Azuma and Sugie 8 to solve certain motion-coordination task for multi-agent systems, such as coverage problem. This work was supported in detailed proof by Azuma et al. 9 The interesting problem encountered in the standard broadcast control framework is in determining methodology to perform any motion-coordination task by sending the same signal to each agent indiscriminatingly. Here, they came out with a novel solution by designing global and local controllers as a feedback system. These global and local controllers’ functions were, respectively, to generate commands to the agents by calculating the cost function and move the agents randomly and deterministically. Several solutions to the problem in the standard broadcast control framework were obtained. In their study, Tanaka et al. 12 focused on designing time-varying gain embedded in the local controllers for fast convergence. This work will also enable us to easily tune the gain. As a digital camera is commonly used as global controller’s sensor, Tanaka et al. 13 had modified the standard broadcast control framework to cancel out the quantize effect caused by digital camera. Besides that, Tanaka et al. 14 had proposed to combine the standard broadcast framework with one-to-one agent communication known as mix environment. This combination aims to overcome the limited communication range and to reduce convergence time. However, their results were validated for coverage 8,13 and consensus tasks only, 12 –14 and it was unsure whether the standard broadcast control framework can work for other motion-coordination tasks. In this study, we have simulated the standard broadcast control framework with some other motion-coordination tasks and identified that it only works for certain multi-robot coordination tasks. This is because in some coordination tasks, the broadcast control framework often encounters instability phenomenon. In this article, the instability phenomenon means that the robots are moving away from their preassigned target positions and never converged to the target positions due to unacceptable broadcasting input signal. For example, a group of robots (each employing the standard broadcast controller) are tasked to go to some target positions which are highly contaminated. Due to the instability phenomenon, these robots will move away from the target positions and probably will go to the place where the condition is unsuitable for the robots and might cause a serious damage to them. From this example, it is obvious that the instability phenomenon is important to be addressed and solved.
To illustrate the cause of the instability issue, consider a standard broadcast control system as shown in Figure 2, which comprises robots, local controllers, and a global controller. In the standard broadcast control framework,
8,9
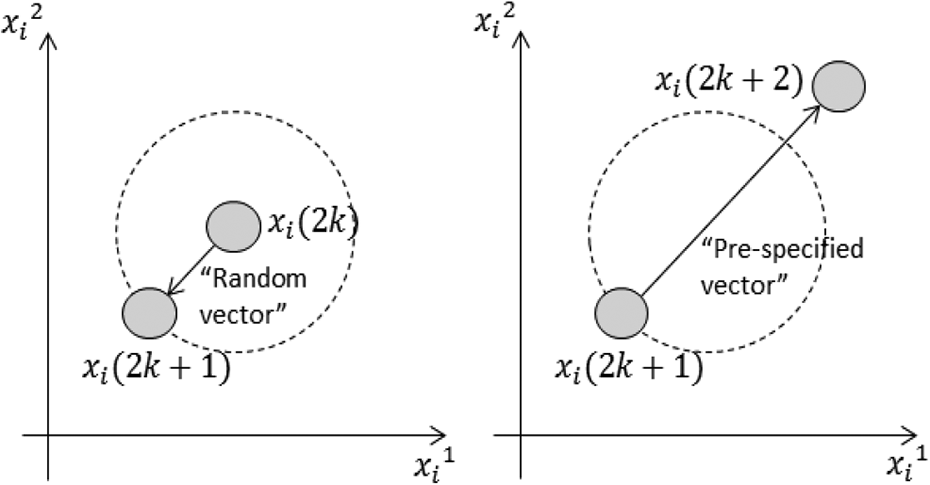
the position of the robot is maneuvered by the local controller that connotes the random and the deterministic input, alternately. In particular, for iteration
Standard broadcast control framework.
Motion of robots by standard broadcast control framework.
In this article, we solved the instability problem by modifying the standard broadcast control framework which consisted of global and local controllers. In our modified broadcast control framework, a new local controller is derived so that it can limit the amount of the deterministic input in updating the robots’ position. Note that the derivation is based on simultaneous perturbation stochastic approximation (SPSA) with norm-limited update vector algorithm adopted from Tanaka et al. 19 The algorithm was adopted because of the practicality in solving various model-free optimization problems. 19 –21 From this fact, we believe that the same idea can be applied to solve the instability problem in the standard broadcast control framework. On the other hand, we proved that the modified broadcast controller asymptotically had achieved the task with a probability of 1. Besides that, the numerical simulation also showed that the modified broadcast control can effectively handle the given task. In addition, it is expected that our proposed broadcast control framework may also reduce the convergence time in performing the motion-coordination tasks.
Our contributions are summarized as follows: Modified an existing broadcast control framework (referred as standard broadcast control framework) based on SPSA with norm-limited update vector algorithm to overcome the instability problem of the existing broadcast control framework in solving some of the motion-coordination tasks (e.g. role-assignment tasks). By solving the instability problem, we believe that a large class of motion-coordination tasks can be catered by the broadcast control framework such as containment,
22
flocking,
23
and formation
24
control. Proved that the modified broadcast controller can achieve the motion-coordination task with a probability of 1. Generated simulation results showing our modified broadcast controller also may have faster convergence time as compared to the standard broadcast controller while being competitive with another existing broadcast control framework.
Broadcast control framework
This section briefly explains the standard broadcast control framework. Then, an example of unstable solution using the standard broadcast control is illustrated.
Standard broadcast control framework
Based on standard broadcast control system P in Figure 2, the state of the robot (e.g. discrete time model of an omnidirectional mobile robot)

where
The local controllers

where


where

and
The global controller G is given by

where

for every initial positions of the robots
Unstable solution using standard broadcast control framework
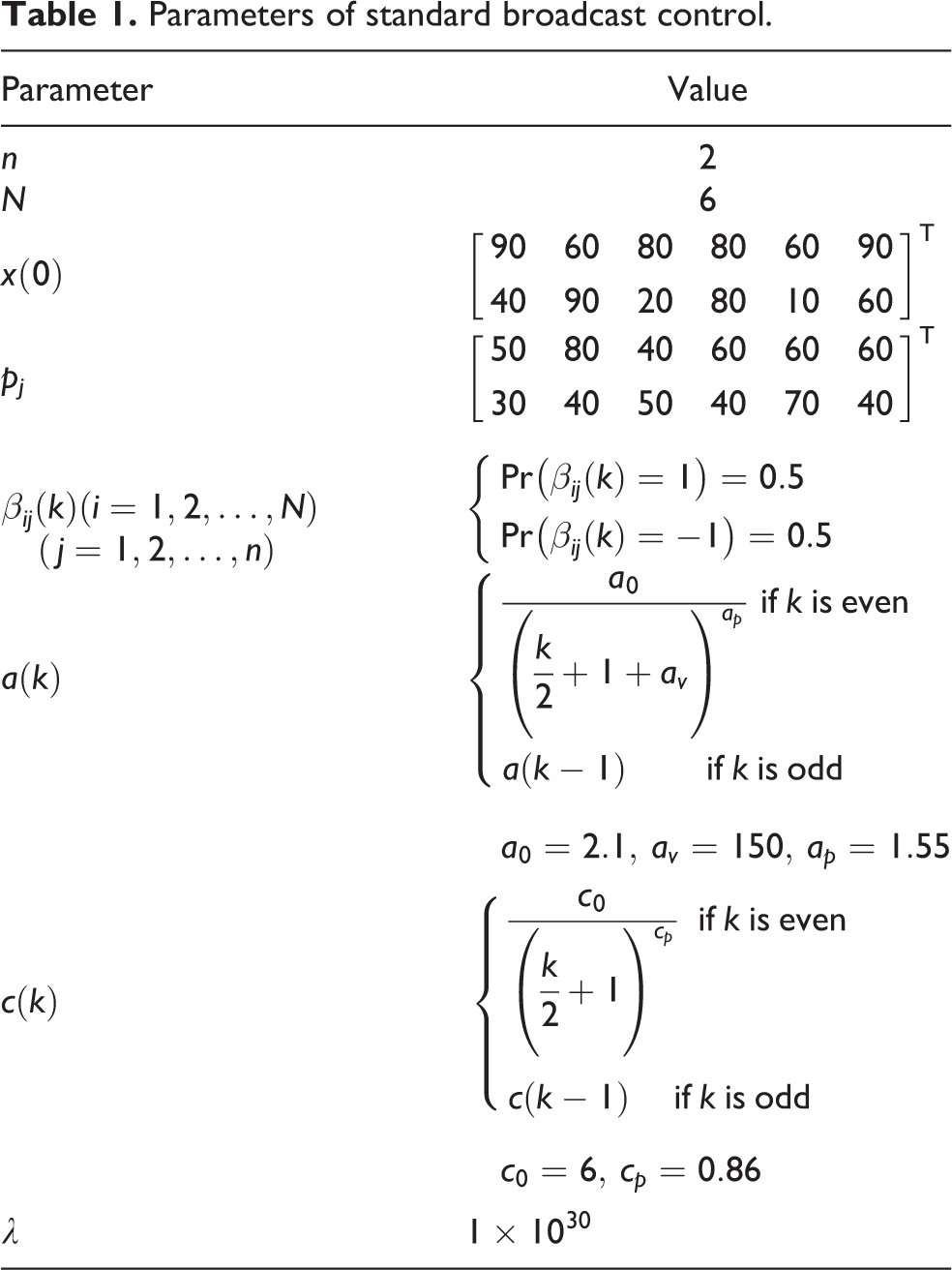
In demonstrating the instable phenomenon in the standard broadcast control framework, we chose role-assignment task 9,25 given by

where
Parameters of standard broadcast control.

Evolution of the cost function for role-assignment task using standard broadcast control framework.
This example proved that the standard broadcast control framework does not always resolve the motion-coordination task issue. Hence, it encouraged us to adopt a modified version of broadcast control framework.
Modified broadcast controller
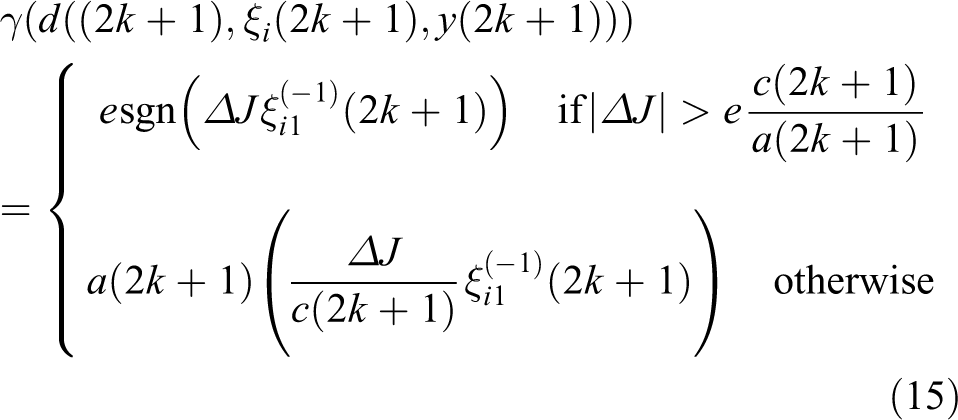
In order to solve the instability phenomenon above, we propose a modified broadcast controller. In particular, the function ψ in the local controller is modified as

where

Meanwhile, the function and the global controller are set similar to the standard broadcast controller in equations (3) and (5), respectively. Next, the convergence result of our proposed modified broadcast controller in equations (1), (3), (5), and (7) is shown.
Theorem 1
For the modified broadcast control system P, suppose that

where

where
Proof
The following facts prove the theorem.



where

If k is even, the position of the robot in equation (1) is updated with random movement
Note that equation (12) corresponds to a general stochastic approximation algorithm in Appendix 1. From the convergence conditions of the modified broadcast controller algorithm, it is obvious that
(ii) Conditions from

since

and since the parameter that we want to control is
where

So, equation (16) shows that it satisfies equations (11) and (12) that we have equation (13).
(iv) The detailed proof of fact (ii) is shown here. For the first condition, since

By applying Taylor’s theorem (e.g. Appendix I in Azuma et al.,
27
),

Substituting equation (18) into equation (13)

Finally, from equations (13) and (18),
which verify the proof.
Here we provide comments on conditions
Before explaining the simulation results, we summarize the modified broadcast control in Algorithm 1.
Modified broadcast controller.


Numerical simulation
Consider the broadcast control system P in Figure 2, for
Figure 5 shows the snapshots of the initial positions of the robots

Snapshot of (a) initial position and (b) target position.
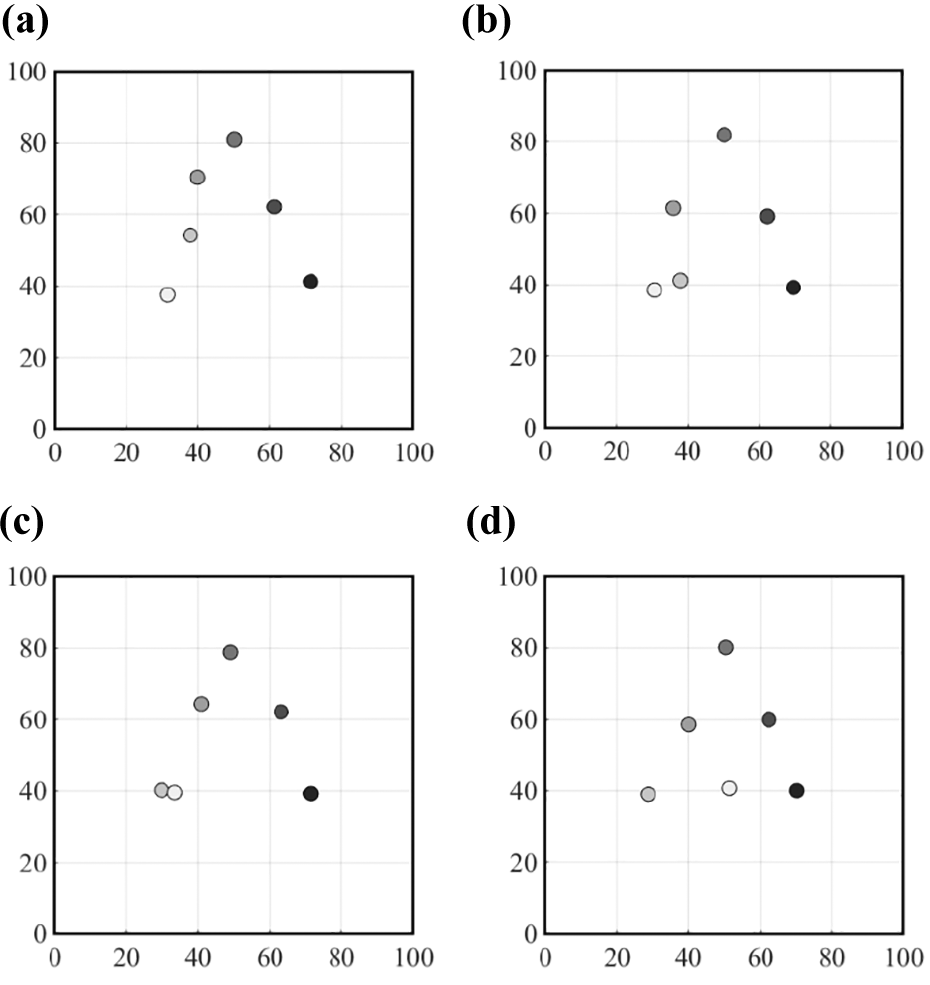
Positions of robots at different iteration k when performing role-assignment task: (a)
Figure 7 provides the evolution of the cost function from Figure 6 to perform the role-assignment task with the modified broadcast controller. The evolution is also compared with the standard and constant-distance random movement
12
(CDRM) broadcast controllers to analyze the performance of our modified broadcast controller in performing the role-assignment task. From the figure, the robots with modified broadcast controller begin to converge into the assigned positions at about

Evolution of the cost function for role-assignment task.
Experiment on different gain parameters for role-assignment task.

CDRM: constant-distance random movement.
In order to demonstrate the usefulness of our modified broadcast controller in handling various classes of motion-coordination tasks, we also employed it to a motion-coordination task that has been successfully solved using the standard and CDRM broadcast controllers. Consider a consensus task 13 given by

This cost function is different from the role-assignment task where the robots are assigned with their corresponding target positions. For example, robot x
1 is required to go to target position p
1, robot x
2 is required to go to target position p
2, and so on. Readers may refer to Cao et al.,
29
Wasiela et al.,
30
and Huang et al.,
31
for other examples of consensus task. Note that we used the same parameter values as in Table 1 for this task except

Positions of robots at different iteration k when performing consensus task: (a)
Figure 9 shows the performance index of the modified broadcast controller in performing the consensus task. Since the standard and CDRM broadcast controllers can also perform this consensus task, we also include the evolution of the cost function of these two broadcast controllers so that we can compare the convergence time between all broadcast controllers. In this regard, we define the convergence time as the required number of iterations for the objective function

Evolution of the cost function for consensus task.
In order to fairly compare the convergence time in performing the consensus task, we run the simulation for 10 times for each broadcast controller and tabulated the results in Table 3. From the table, in particular the average values, it is obvious that the modified broadcast controller significantly improves the convergence time approximately 32% compared to the standard broadcast controller while being competitive when compared to the CDRM broadcast controller. On the other hand, the standard deviation shows that the convergence time for the modified broadcast controller does not varies much from the average in contrast with standard and CDRM broadcast controllers. This convergence time improvement is due to the limit we set for the norm of the update vector of robots’ positions (in this simulation, the parameter is e). Consecutively, we can confirm the effectiveness of our modified broadcast controller in handling the motion-coordination task in terms of the instability and also has the possibility to reduce convergence time.
Convergence time for modified, standard, and CDRM broadcast controllers.

CDRM: constant-distance random movement.
Conclusion
This article has addressed the issue of unstable solution in the standard broadcast control framework to solve certain motion-coordination tasks. Briefly, the standard broadcast control framework was modified, that is, limiting the norm of the update vector of robots’ position. As a theoretical result, the proposed modified broadcast controller was proven to approximately achieve the convergence w.p.1. Finally, simulation results were provided to illustrate the effectiveness of our modified broadcast controller in solving the instability issue and the possibility to reduce convergence time. As for future work, collision avoidance should be included into the broadcast controller so that we can prevent damage to the robots. In addition, experiments based on real robotic systems should also be considered to validate the performance of the modified broadcast controller.
Footnotes
Acknowledgement
The authors would like to thank Universiti Teknologi Malaysia for funding this research project.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Universiti Teknologi Malaysia through a research grant (Q.K130000.2543.13H80) titled “Machine Vision Algorithm for Remotely Operated Vehicle in the Inspection of Industrial Reservoirs.”
Appendix 1
A general stochastic approximation algorithm, that is, Robbins–Monro algorithm, is given by
where
Considering the algorithm in equation (1A), the solution for
From equation (12) and
and by applying Taylor’s theorem to
This means
The form in equation (4A) can be transformed into
where