
Abstract
Aiming at the formation problem in the cooperative navigation of unmanned aerial vehicle swarm, a cooperative position error analysis method based on cooperative dilution of precision is studied in this article. During cooperative flight, the unmanned aerial vehicle swarm can use the received position and ranging information of the adjacent unmanned aerial vehicles to calculate the position, and fuse with its own sensor position information. The final positioning accuracy depends not only on the capability of the ranging sensor but also on the position accuracy and formation of the adjacent unmanned aerial vehicles. In this article, these influence factors are combined to put forward a cooperative dilution of precision calculation method suitable for unmanned aerial vehicle swarm cooperative navigation. On this basis, a cooperative integrated navigation method based on ranging information is designed. Finally, the performance of cooperative navigation of unmanned aerial vehicles in different formations is simulated and analyzed. The simulation result shows that the cooperative dilution of precision method proposed in this article can effectively analyze the influence of formation on the positioning accuracy of unmanned aerial vehicle swarm, and the final combined positioning result is consistent with the cooperative dilution of precision analysis result.
Keywords
Introduction
Driven by the development of control, navigation, and other related technologies, unmanned aerial vehicle (UAV) has received extensive attention in many fields. Due to the limited mission performance and damage resistance of single UAV, the research has gradually developed from single UAV to UAV swarm. With advantages of high survival, low cost, and high efficiency, UAV swarm has a broad application prospect in military and civilian fields, such as military operations, disaster relief and emergency response, precision agriculture, line patrol, surveying and mapping, and safety monitoring. 1
Accurate navigation information is the key factor that influences whether the UAV swarm can successfully complete the task. At present, satellite navigation is the main method of UAV swarm positioning, but there are two drawbacks if only relying on satellite navigation: when UAV swarm executes tasks in areas such as urban and jungles, satellite navigation may not be available due to occlusion, 2 and in the case of dense cluster, UAVs need higher positioning accuracy to meet the requirements of the mission, and the cost for equipping all personnel with high-precision satellite navigation equipment is very high. Therefore, the cooperative navigation method to improve the positioning accuracy of UAV swarm has become a research hotspot. 3 –5
In order to solve the problem of cooperative navigation of UAV swarm, scholars have carried out targeted research. Mainstream UAV swarm cooperative navigation schemes mainly include methods based on visual assistance and wireless ranging information assistance. 6 –9 Vetrella et al. proposed a cooperative navigation method that integrates inertial, magnetometer, available satellite pseudorange, cooperative UAV position, and monocular camera information, effectively improving the navigation performance of UAV swarm under GPS constraints. 6 Strader et al. used the noise estimation method of wireless ranging information and airborne navigation system to calculate the relative attitudes and azimuth of multiple UAVs. 8
In the process of cooperative navigation, the positioning accuracy depends not only on the capability of the ranging sensor but also on the distribution between nodes and the position accuracy of cooperative nodes. 10 –16 Heng and Gao analyzed the influence of the number of nodes and the accuracy of sensors on the positioning accuracy in wireless sensor network and proposed a calculation method for the lower bound of the positioning accuracy. 10 Causa et al. studied the calculation method of cooperation formation accuracy based on visual measurement, and the experimental results showed that under the appropriate cooperative formation, the positioning accuracy of UAV swarm could reach the meter level through visual measurement assistance. 11 Sivaneri and Gross used an unmanned ground vehicle (UGV) to aide an UAV’s navigation solution, and the UGV's location is designed to reduce the geometric dilution of precision (GDOP) between the UGV and the UAV. 12
In the cooperative navigation method based on wireless ranging information, the analysis of positioning error caused by formation is mostly based on the traditional GDOP method derived from satellite navigation, without taking into account the position error of the cooperative UAV itself. Aiming at these problems, a cooperative dilution of precise (C-DOP) calculation method combining ranging error, clock error, and position error of cooperative UAVs is proposed in this article to analyze the positioning error of UAV swarm under different formations. It provides an idea for path planning and massive cooperative information screening. On this basis, a cooperative navigation algorithm of UAV based on inertial measurement unit (IMU) and cooperative ranging information is designed.
This article is composed of three sections. The second section provides the cooperative navigation scheme based on C-DOP. The third section firstly describes the calculation method of C-DOP by combining the position error, clock error, and ranging error, and then provides an extended Kalman filter algorithm for the fusion of inertial information and ranging information. At last, a cooperative navigation method based on cooperative information screening is introduced in this section. The fourth section presents the simulation environments and the results in a series of simulation conditions. The fifth section concludes the study and introduces future research topics.
Schematic of cooperative navigation
As shown in Figure 1, the UAV swarm can be equipped with navigation sensors with different accuracy in the process of carrying out tasks. UAVs carrying sensors with poor accuracy or flying in areas without satellite signals can obtain the position and relative distance of UAVs with high positioning accuracy through data link. The output of inertial sensor and cooperative information can be fused through Kalman filter to obtain the final navigation result.
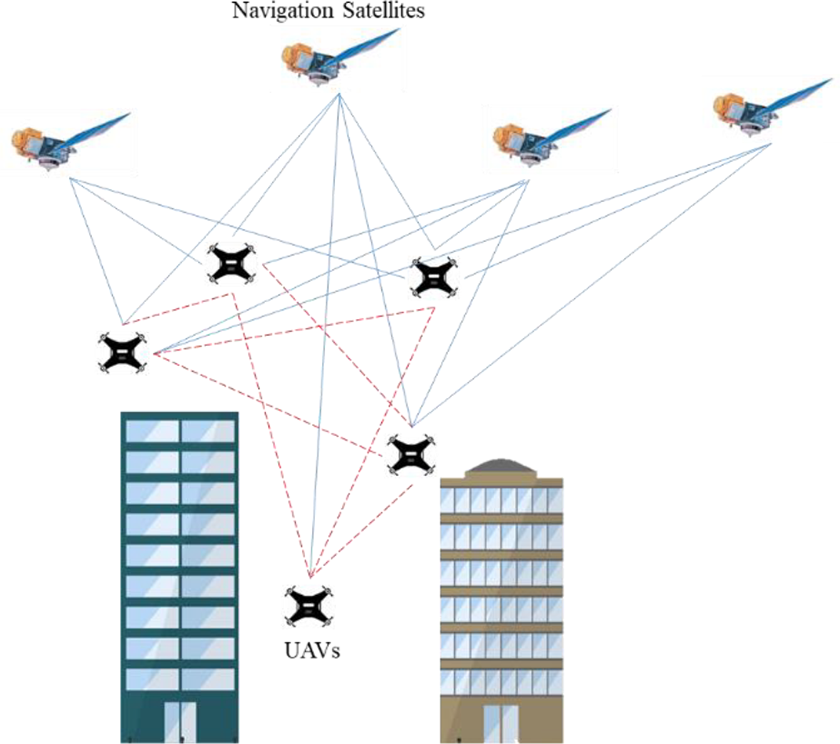
Schematic of cooperative navigation.
In order to calculate the three-dimensional position, theoretically one UAV can locate itself by acquiring the position and distance information of four UAVs. Therefore, the analysis of C-DOP can screen out the cooperative information for appropriate formation, so as to reduce the calculation amount. On the other hand, the calculation of C-DOP can provide path guidance to realize optimal cluster formation design and improve cooperative positioning accuracy. The UAV with high-precision navigation equipment in the UAV swarm is called leader-UAV, while the UAV with low-precision equipment is called wingman-UAV. The specific cooperative navigation framework is shown in Figure 2.

Framework of cooperative navigation.
Cooperative navigation method of UAV swarm
Cooperative dilution of precision calculation method
In the flying process of UAV swarm, the positioning accuracy of wingman-UAV depends not only on the distribution of leader-UAVs but also on the position accuracy of leader-UAVs. Therefore, this article introduces the concept of DOP in satellite navigation and designs a C-DOP calculation method that combines ranging error and the position error of leader-UAVs.
Suppose clocks on all leader-UAVs are synchronized, and the range measurement between the ith leader-UAV and the wingman-UAV is shown below

where di
denotes the actual distance between the ith leader-UAV and the wingman-UAV,

where

where
The distance error between wingman-UAV and the ith leader-UAV can be obtained by differential equation (3) with the ranging measurement

The position error of leader-UAV can be modeled as white noise, and it is unrelated to the ranging measurement noise

where
When the wingman-UAV screens the cooperative navigation information of n leader-UAVs to assist itself, the following equation can be constructed

where
From equation (6), the covariance of distance difference vector in ECEF coordinate has the following relationship with the position error of wingman-UAV

where
The covariance of position error can be obtained

The

Convert the position error to the navigation coordinate (ENU coordinate)
where
According to equation (9), equation (8) can be rewritten as follows

Isolating the ranging noise and equation (10) is changed into the following form

For the wingman-UAV, the C-DOP can be defined as

and the C-DOP in east, north, and up directions are defined as
Integrated algorithmic model of cooperative navigation system
State equation of cooperative navigation system
The state vector of the wingman-UAV’s cooperative navigation system is modeled as 17

where
The state equation can be constructed according to the defined state vector

where
Measurement equation of cooperative navigation system
The transformation relationship between

According to equations (5) and (14), the measurement equation of cooperative navigation system is constructed by the ranging measurements of n leader-UAVs as

where
Cooperative navigation method based on cooperative information screening
In the process of cooperative navigation, if all the cooperative information received by the wingman-UAV enters the Kalman filter, the calculation process will be very complex. Therefore, it is necessary to screen the cooperative information before information fusion. In this section, we propose a cooperative method based on cooperative information screening, which can be divided into the following steps: Step 1: Calculating the critical C-DOP value corresponding to the required positioning accuracy in advance. Step 2: The wingman-UAV calculates the navigation information by inertial navigation system and receives cooperative information including the location of the leader-UAVs and distance. Step 3: Selecting the leader-UAV with the highest elevation as the first one, according to the azimuth angle of the first one, —four to six UAVs are selected evenly to make the difference between their azimuth angles roughly balanced, and then a new leader-UAV swarm is formed. Step 4: Calculating the C-DOP corresponding to the leader-UAV swarm. If the requirement is not met, new UAVs will be selected from the remaining leader-UAVs until the accuracy requirement is met. Step 5: The cooperative information obtained in step 4 is used for Kalman filter to update the navigation information of wingman-UAV. Step 6: Return to step 2 for inertial navigation system (INS) solution and cooperative information reception. Then calculating whether the C-DOP corresponding to the leader-UAV swarm can still meet the requirements. If yes, skip to step 5. If no, skip to step 3.
Simulation results
In order to verify the effectiveness of the proposed algorithm, the Monte Carlo method is firstly used to calculate the C-DOP between leader-UAVs and wingman-UAV in different positions, and then the positioning accuracy of different DOP situations is tested.
C-DOP and position of leader-UAVs
In the simulation scenario, the longitude, latitude, and altitude of a static wingman-UAV in UAV swarm are 110°, 20°, and 500 m, respectively. In order to simplify the analysis, it is assumed that two leader-UAVs and one satellite have been selected and fixed, and the clock error can be neglected, while the remaining leader-UAVs are distributed around the wingman-UAV in horizontal direction with a radius of 50 m and in altitude direction from 200 m to 800 m. The simulation parameters are set and shown in Table 1 and the distribution of UAV swarm is shown in Figure 3.
Simulation parameters.

UAV: unmanned aerial vehicle.
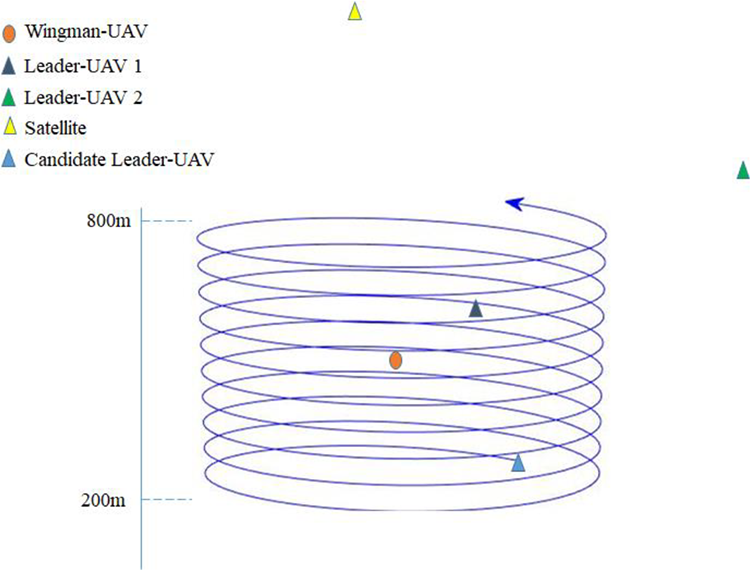
Space distribution of UAV swarm. UAV: unmanned aerial vehicle.
We choose one of the candidate leader-UAV to combine with the selected leader-UAVs and satellite, and then calculate the corresponding C-DOP. The C-DOP corresponding to each candidate leader-UAV position was calculated through 8000 Monte Carlo simulations. The relationship between C-DOP and selected candidate leader-UAV positions is shown in Figure 4.
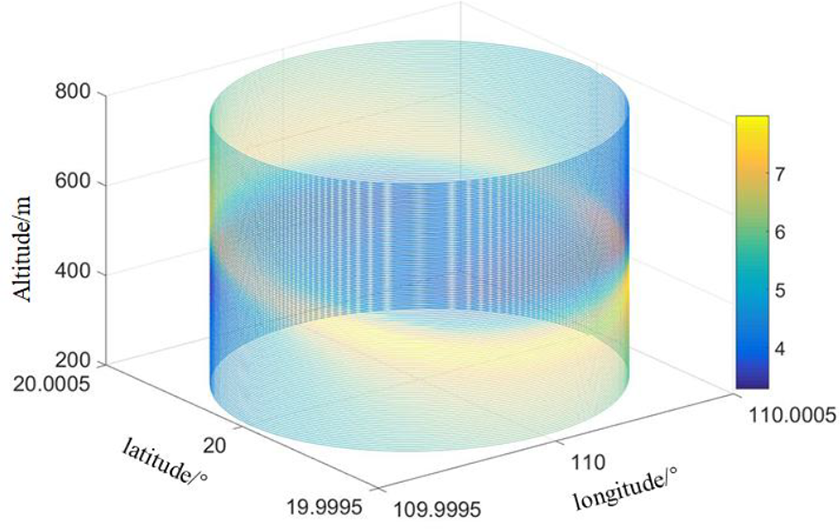
The relationship between the position of candidate leader-UAV and C-DOP. UAV: unmanned aerial vehicle; C-DOP: cooperative dilution of precision.
As can be seen from Figure 4, the C-DOP calculated by selecting candidate leader-UAVs in different positions is also different. Therefore, in the process of cooperative navigation, it is necessary to select the appropriate location of UAV to assist in order to achieve better positioning performance.
Filter results
According to the C-DOP given in Figure 4, the cooperative information under different C-DOP is combined with the inertial information of the wingman-UAV itself. The simulation parameters of the IMU are listed in Table 2.
Simulation parameters of IMU.

IMU: inertial measurement unit.
According to Figure 4, three conditions with different C-DOP are selected to investigate the positioning accuracy of the wingman-UAV. The corresponding relationship between C-DOP and the position of the candidate leader-UAV is shown in Table 3.
C-DOP and position of candidate leader-UAV.
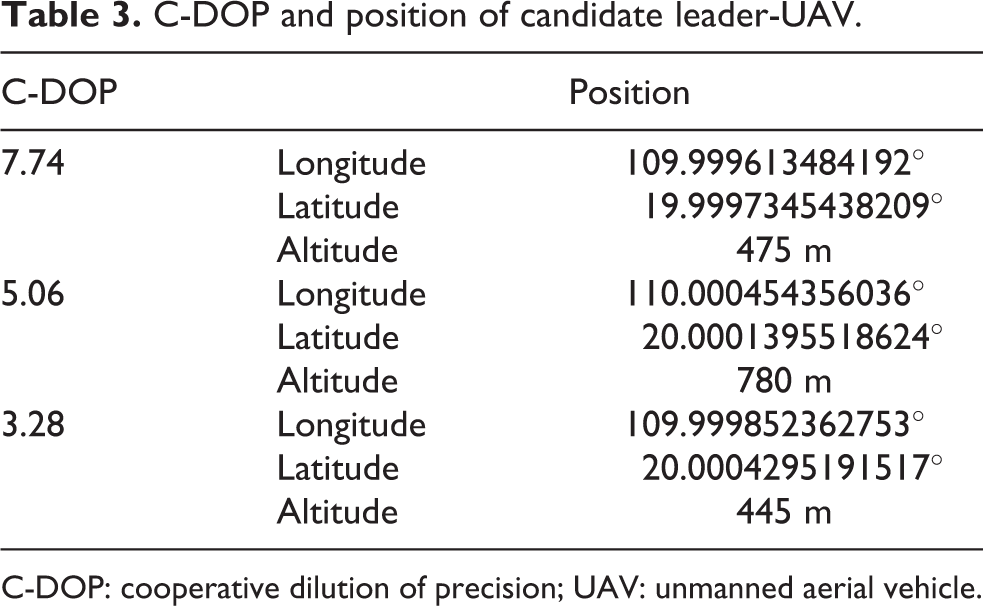
C-DOP: cooperative dilution of precision; UAV: unmanned aerial vehicle.
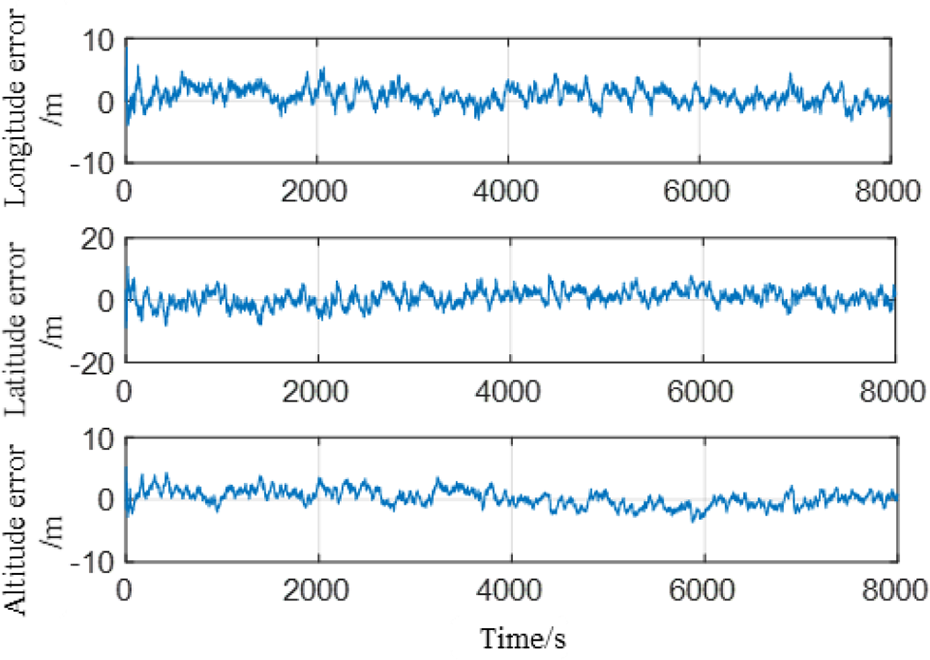
The position errors of the wingman-UAV and the corresponding C-DOP are shown in Figures 5 to 7, respectively.
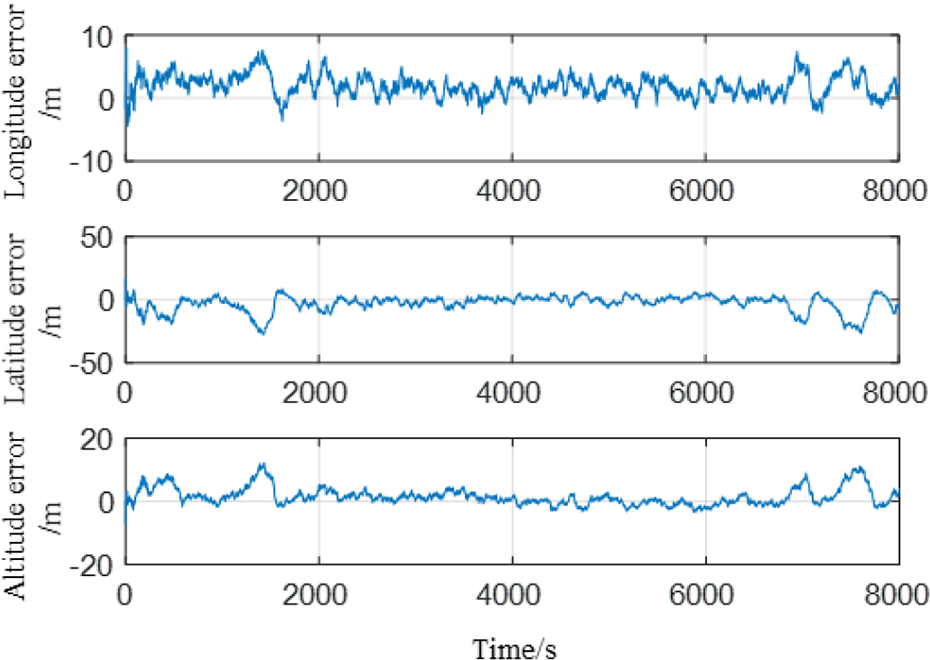
Position error of wingman-UAV (C-DOP = 7.74). C-DOP: cooperative dilution of precision; UAV: unmanned aerial vehicle.
Position error of wingman-UAV (C-DOP = 5.06). C-DOP: cooperative dilution of precision; UAV: unmanned aerial vehicle.

Position error of wingman-UAV (C-DOP = 3.28). C-DOP: cooperative dilution of precision; UAV: unmanned aerial vehicle.
In order to compare the performance of the C-DOP and the traditional DOP in position error analysis, the position errors of the wingman-UAV, the C-DOP, and the DOP in three directions are calculated. The calculation method of DOP can be seen in the work of Sivaneri and Gross, 12 and the DOP in east, north, and up directions are represented by E-DOP, N-DOP, and U-DOP, respectively. Statistical results of the position error of the wingman-UAV are shown in Table 4. From the comparison results, it can be seen that the positioning accuracy of the wingman-UAV is positively correlated with the C-DOP, and the position errors in longitude, latitude, and altitude are positively correlated with C-E-DOP, C-N-DOP, and C-U-DOP, respectively.
Statistics of C-DOP and DOP.

RMSE: root mean square error; C-DOP: cooperative dilution of precision.
According to Table 4, in the case of better formation (C-DOP is small), the traditional DOP calculation method does not accurately describe the size of the error in longitude and latitude, and the C-DOP algorithm proposed in this article can more accurately describe the position accuracy of the wingman-UAV in all directions than the traditional DOP calculation method. In order to further verify the effectiveness of the method, three scenarios are designed for comparison. Scenario 1: Choosing another better formation (C-DOP = 3.32) with unchanged parameters such as the position and error of the leader-UAV 1, leader-UAV 2, and wingman-UAV. Scenario 2: The position of the selected candidate leader-UAV is consistent with that of C-DOP at 3.28, and the standard deviation of the position error white noise of the leader-UAV in three directions is changed to 0.5 m, 0.5 m, and 0.5 m, respectively. Scenario 3: The position of the selected candidate leader-UAV is consistent with that of C-DOP at 3.28, and the standard deviation of the position error white noise of the leader-UAV in three directions is changed to 20 m, 25 m, and 20 m, respectively.
Combining the above three scenarios, the simulation results are shown in Table 5.
Statistics of simulation results in three given scenarios.
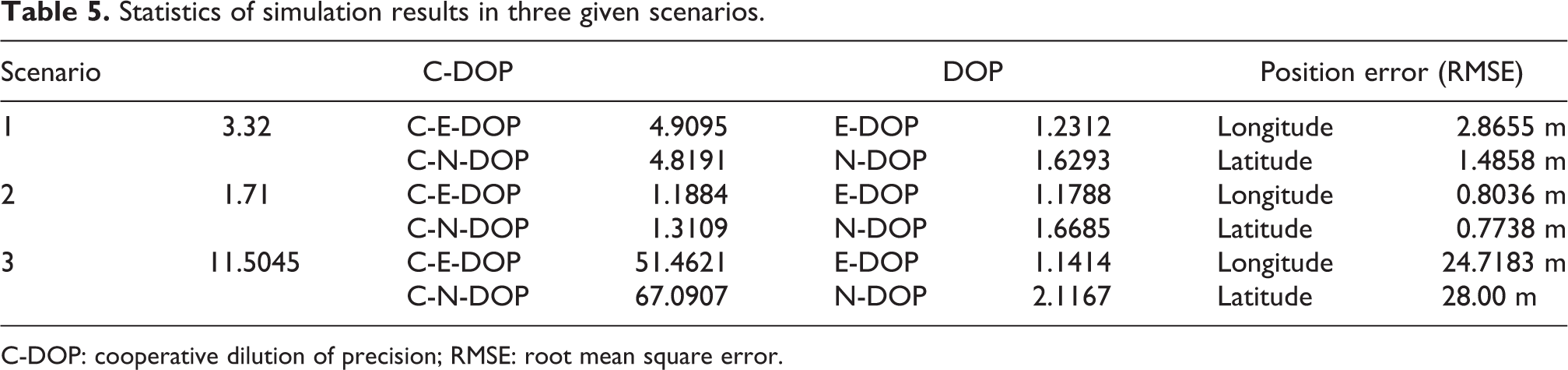
C-DOP: cooperative dilution of precision; RMSE: root mean square error.
As can be seen from Table 5, when the position error of the leader-UAV is small, that is, the impact of the position error is small, the results of the C-DOP method proposed in this article are approximately the same as those of the traditional DOP method. However, the C-DOP can better describe the level of positioning accuracy achieved by wingman-UAV when the position errors of leader-UAVs are large.
In order to verify the effectiveness of the proposed method in reducing the amount of computation, the following scenario is designed.
In this scene, a wingman-UAV can receive the cooperative information of 20 leader-UAVs around and filter the information through the method proposed in the “Cooperative navigation method based on cooperative information screening” section. The sensor parameters of wingman-UAV and leader-UAVs are the same as the previous simulation parameters. We choose 4 as the critical value of C-P-DOP. The spatial distribution of the UAV group is shown in Figure 8.

Space distribution of UAV swarm. UAV: unmanned aerial vehicle.
Two hundred Monte Carlo simulation trials are carried out for the above scene, and the running time of codes (the simulation time of each trial is 8000 s) obtained by the “tic” and “toc” functions of MATLAB (2016b) is used as the performance metric. The simulation results in the two cases of no information screening and information screening by the method proposed in this article are shown in Table 6.
Statistics of simulation results.

RMSE: root mean square error.
The position error in Table 6 is calculated by

where
In the 200 times Monte Carlo simulation trials, the relationship between the number of leader-UAVs after information screening and the times corresponding to each number is shown in Figure 9.

Number of leader-UAVs and corresponding times during 200 Monte Carlo simulation trials. UAV: unmanned aerial vehicle.
It can be seen from Figure 9 and Table 6 that after information screening, the number of leader-UAVs participating in information fusion has decreased, while the positioning accuracy level of the wingman-UAV has not reduced significantly. Therefore, the cooperative navigation method proposed in this article can effectively reduce the computational complexity while ensuring the positioning accuracy.
Conclusion
Aiming at the problem that cooperative positioning accuracy of UAV swarm is affected by formation geometries in cooperative navigation process, a cooperative navigation method based on C-DOP is proposed. The calculation of C-DOP depends not only on formation geometries but also on ranging measurement error and position error of leader-UAVs. Therefore, compared with the traditional DOP method, C-DOP can more accurately describe the positioning performance of the wingman-UAV. On the basis of precision factor analysis, Kalman filter is used to fuse cooperative information and inertial information. The simulation results show that the proposed method can effectively analyze the positioning accuracy of UAV swarm with different formation geometries and realize the localization of wingman-UAV.
Future work will focus on cooperative path planning for UAV swarm, so as to provide better cooperative positioning service for wingman-UAV in real time.
Footnotes
Author contributions
Conceptualization, ZX and MC; methodology, MC and ZX; validation, MC; writing—original draft, MC and ZX; writing—review and editing, JL, RW, and JX.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partially supported by the National Natural Science Foundation of China (grant nos 61673208, 61703208, 61873125, 61533008, and 61533009), advanced research project of the equipment development (30102080101), Foundation Research Project of Jiangsu Province (The Natural Science Fund of Jiangsu Province, grant nos BK20181291, BK20170815, and BK20170767), the Aeronautic Science Foundation of China (grant nos 20165552043 and 20165852052), the Fundamental Research Funds for the Central Universities (grant nos NP2018108, NZ2019007, NJ20170005, and NP2017209), Foundation of Key Laboratory of Navigation, Guidance and Health-Management Technologies of Advanced Aerocraft (Nanjing University of Aeronautics and Astronautics), Ministry of Industry and Information Technology, Jiangsu Key Laboratory “Internet of Things and Control Technologies,” and the Priority Academic Program Development of Jiangsu Higher Education Institutions, Science and Technology on Avionics Integration Laboratory.