
Abstract
To improve the robustness performance of dynamic sliding mode control to the time-varying uncertainties without the upper bound information in a hybrid robot system, a global robust super-twisting algorithm with adaptive switching gains is proposed. The main contributions are as follows: (1) for the problem that the robustness of the sliding mode control system is not guaranteed in the reaching phase, a global robust sliding surface is designed to eliminate the reaching phase of the sliding mode control; (2) for the chattering problem existing in the sliding phase of the sliding mode control system due to the conservative selection of switching gains, based on a reconstructive super-twisting sliding mode control and the equivalent principle, a fast-adaptive law is designed to effectively reduce the chattering while the global robustness is ensured. The stability of the proposed algorithm is proved by Lyapunov stability theorem. The simulation and experiment on the hybrid robot prototype system are implemented to verify the effectiveness of the proposed control method.
Introduction
Hybrid robot combines serial mechanism and parallel mechanism reasonably and inherits their advantages of large workspace and strong carrying capacity. 1 It has been used in machining, 2 aircraft manufacturing, 3 and other fields. However, in the actual operation of the robot, the control performance degradation is often caused by uncertainties. Due to the effectiveness in solving uncertainties, the sliding mode control (SMC) has many applications such as robot control, 4 motor control, 5 and photovoltaic pumping. 6 Furthermore, the SMC is often combined with other control methods to realize complementary advantages, so as to achieve better control effect for robotic systems, such as the researches in the work. 4,7,8 Based on this, this article takes a hybrid robot as the research object, and for the time-varying uncertainties without the upper bound information in the robot system, a global robust super-twisting sliding mode control (STW) method with adaptive switching gains is proposed to guarantee that the hybrid robot can operate in high performance. 9
The SMC is insensitive to the uncertainties only in the sliding phase, but not robust in the reaching phase. 10 Therefore, for the problem that the hybrid robot dynamic SMC has no robustness in the reaching phase, this article adopts the global sliding mode 11 strategy and a nonlinear sliding surface suitable for the hybrid robot control is designed, so as to eliminate the reaching phase of the SMC. As a result, the global robustness of the hybrid robot control system is guaranteed.
In the sliding phase, the SMC is robust to the system uncertainties theoretically. 12 However, because of the difficulty in obtaining the upper bound information of the uncertainties in real systems, switching gains, which ought to be chosen in line with the actual bound of the uncertainties, should be selected conservatively to guarantee the robustness of the hybrid robot system. 13,14 Accordingly, the discontinuity of the control law will produce a serious chattering problem to the control system and thus generates the uncontrollable chaotic dynamics which is sensitive to the initial condition. 15 As a result, mechanical components may be fatigued, and even worse, the system may break down in a short time. 16,17 The STW 18 is a high-order SMC, which can suppress chattering with less information required. However, a discontinuous term still exists in the STW law. 19,20 To this end, an adaptive law for the STW switching gains can be designed to avoid the conservative selection of the switching gains, and thereby, the chattering in the system is suppressed notablely. 21
For the problem that the upper bound information of the uncertainties in an inverted-pendulum system is unknown, in the work of Huang et al., 22 an adaptive law with changeable switching gains is firstly designed according to the sliding variable which means the distance from the system state to the sliding surface. However, the chattering problem still remains in the control system due to the continuous increase of the switching gains. Aiming at the problem, the work of Shtessel et al. 19 selects an electropneumatic actuator as the research object, and an adaptive law has been studied which can reduce the switching gains when the sliding variable approaches zero. The above two adaptive laws for the switching gains are designed indirectly on account of the sliding variable, with which the switching gains of STW may be overestimated undesirably since the value of the sliding variable cannot accurately reflect the upper bound of the uncertainties in real time.
Another adaptive law designing approach for a two-dimensional nonlinear system is proposed in the work. 23 In this work, based on the STW including uncertain term, the equivalent value of the uncertainties is obtained by exploiting the uncertain information contained in the equivalent control, and then an adaptive law is directly designed according to the equivalent value. Consequently, smaller switching gains can be obtained due to the real-time estimated value of the uncertainties. However, two shortcomings exist in the work 23 : (1) In the reaching phase of the SMC, the system state is away from the sliding surface, which will cause the failure of the equivalent control; (2) the changing speed of the switching gains is not considered, so when the uncertainties change rapidly, the switching gains cannot be quickly adjusted to the minimum.
To this end, this thesis takes a hybrid robot as the research object, and a global robust STW method with adaptive switching gains is developed. Firstly, an improved sliding surface is designed to eliminate the reaching phase of the SMC and to achieve the global robustness of the control system. Then, the STW law is reconstructed on the basis of the uncertain hybrid robot and an adaptive law is proposed to simultaneously adjust the speed and size of the switching gains in the premise of unknown upper bound information about the time-varying uncertainties, and thereby smaller switching gains can be obtained quickly to suppress the chattering significantly while the global robustness of the system is ensured. Consequently, the robustness performance of the dynamic SMC in the uncertain hybrid robot system is improved.
The rest of the article is organized as follows. In the second section, for the uncertain hybrid robot system, a global robust STW controller with adaptive switching gains is proposed and then the stability of the controller is proved theoretically. To validate the effectiveness and superiority of the proposed algorithm, the hybrid robot prototype for automobile electro-coating conveying 24 and comparative simulation based on the prototype are respectively covered in the third section and the fourth section. For further verification, the proposed STW controller is applied to the prototype for experiment in the fifth section. Finally, conclusions are outlined in the sixth section.
Controller design
The standard dynamic equation of the hybrid robot can be expressed as 25

where
Considering uncertainties in the hybrid robot system, the dynamic model can be given by

where
Remark 1
Modeling errors caused by the inaccurate measurements and flexible loads during the modeling process of the hybrid robot are considered as parametric uncertainties. 27 Besides, the friction and the external disturbance are nonparametric uncertainties. It is worth noting that both parametric and nonparametric uncertainties in this article are time-varying and are collectively referred to as lumped disturbance.
Design of the global robust STW algorithm
The sliding variable for the global robust STW controller is designed as

where
From the standard dynamic equation (1), we have

After differentiating

The STW law can be designed as

where
From equations (5) and (6), the global robust STW law of the hybrid robot can be written as
Partial chattering can be suppressed due to the integral of the switching term in the STW. Besides, from equation (3), we can know that the improved sliding variable
Design of the global robust STW algorithm with adaptive switching gains
Considering the uncertainties, an additional term

where
Based on the reconstructed STW law (8) and the standard dynamic model (1), the global robust STW law of the hybrid robot can be derived as

Remark 2
The uncertain term
In the practical control system, the uncertain term
The sliding variable in the global robust STW meets

Define
Remark 3
The equivalent value

where μ is the filter time constant and evaluated between the sampling step and 1. The estimated accuracy of the equivalent value can be improved via reducing the value of μ. As a result, the constant μ should be as small as possible.
The equivalent value of uncertain term
Remark 4
The switching gains
Define a new variable

where
An adaptive law for the time-varying gain




where
Remark 5
In equation (14), the change direction of the switching gains is adjusted according to the sign of
Remark 6
In equation (16), the changing speed of the switching gains follows the value of
To sum up, the global robust STW law of the hybrid robot can be written as

and the adaptive law for the STW switching gains is designed as equations (13) to (16). Figure 1 is the block diagram of the proposed global robust STW with adaptive switching gains (GNASTW) for the hybrid robot, where

Block diagram of the GNASTW for the hybrid robot. GNASTW: global robust STW with adaptive switching gain; STW: super-twisting sliding mode control.
Stability analysis
Assumption 1
The conditional constraints of the uncertain term


where
Theorem 1
For the hybrid robot system with uncertainties, if the global robust STW law is designed as equation (7), the global robust STW system will be stable asymptotically.
Proof
Setting

According to the Lyapunov stability theorem, the designed global robust STW system will be stable asymptotically.
Theorem 2
For the hybrid robot system with uncertainties, if the global robust STW law is designed as equation (17) and the adaptive law for the switching gains is designed as equations (13) to (16), the system will converge in a finite time.
Proof
The stability of the reconstructed STW in (8) is analyzed firstly.
A new state vector is introduced as

and the equation (8) can be rewritten as
where

where
Next, the designed adaptive law will be proved to ensure
A new variable

and rewrite the equation (12), we know

The Lyapunov function is defined as

Taking the derivative of equation (25) and considering equations (12) to (16) produce
It can be obtained from equation (24) that
The system is asymptotically stable in the light of Lyapunov stability theorem. According to the Barbalat’s Lemma, there exists a finite time t
0. Then,

According to the proofs above, the system converges in a finite time.
Hybrid robot for automobile electro-coating conveying
To validate the effectiveness of the proposed algorithm, the global robust STW algorithm with adaptive switching gains is applied to a hybrid robot prototype for automobile electro-coating conveying. The hybrid robot is a bilaterally symmetric structure connected by a link rod, which is composed of two parts: a walking part and a lifting and turnover part. Figure 2 is the structure diagram of the prototype. The proposed algorithm is applied to the lifting and turnover part of the hybrid robot.

The structure of the hybrid robot for automobile electro-coating conveying. (1) The guide rail. (2) The base. (3) The driving motor of the walking mechanism. (4) The reducer. (5) The slider. (6) The driving motor for lifting. (7) The link. (8) The driven wheel. (9) The driving wheel. (10) The link rod. (11) The car body. (12) The driving motor for turning. (13) The screw.
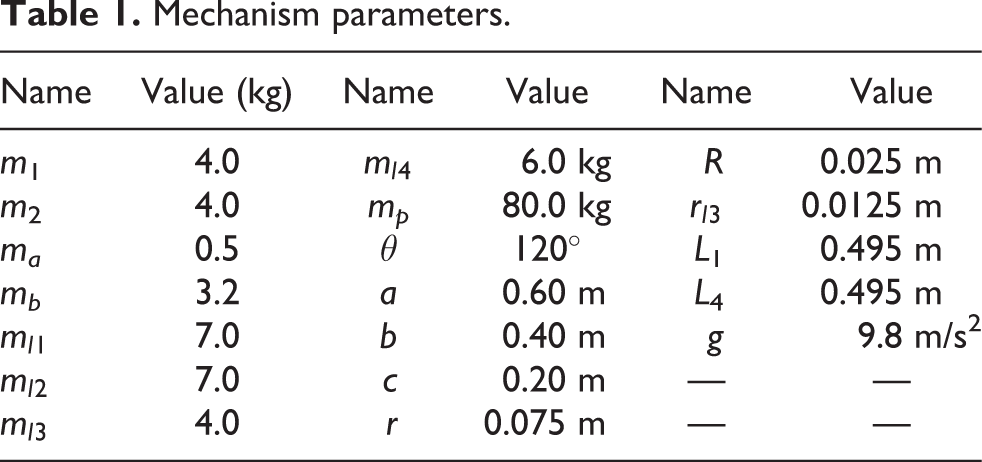
Lagrange method is selected to establish the dynamic model. Besides, to achieve more accurate model, the lifting and turnover part of the hybrid robot is divided into five subsystems: the car body, the body fixer, the branched chain, the driving and the driven wheels, and the sliders. After analyzing the kinetic energy and potential energy of each subsystem, the dynamic model of the lifting and turnover mechanism is obtained, which is formally shown as equations (1) and (2). The mechanism parameter values of the hybrid robot for automobile electro-coating conveying are listed in Table 1.
Mechanism parameters.
The hybrid robot is seriously nonlinear and strongly coupled. And in the actual control system, measuring errors and variable loads are inevitable. As a result, the dynamic parameters are always difficult to be determined. Furthermore, adverse impacts on the operation of the prototype may exist due to the friction and external disturbance.
25
Thus, the lumped disturbance term

where
Remark 7
In Table 1,
Simulation results and analysis
Two sets of contrast simulation were presented and analyzed: (1) the GNASTW and the NASTW; (2) the GNASTW and the global robust STW with adaptive law about sliding variable (GSMASTW) designed in the work. 28
According to the process requirement of engineering practice and the prototype parameters, the expected trajectory of the link rod midpoint can be designed as


To facilitate the actual control of the hybrid robot prototype, the generalized driving force/torque of the link rod midpoint is converted into joint driving force/torque. Based on this, the kinematics analysis is implemented first to obtain the inverse kinematics equation via the analytic method. And via the time derivation of the equation, the Jacobian matrix of the lifting and turnover part in the hybrid robot is deduced as

Conversion from generalized driving force/torque to joint driving force/torque can be realized by

where
The model in Simulink is built by referring to the block diagram of the proposed method in Figure 1. The parameters of the proposed controller are as follows:
1. Contrast and analysis of control performance between the GNASTW and the NASTW
The expected trajectory has been given as the equation (31) after presenting the dynamic model of the hybrid robot for automobile electro-coating conveying which contains uncertainties. The modeling errors are set as Curves of sliding variables: (a) s
1 and (b) s
2. Tracking results of the link rod midpoint: (a) tracking trajectory in z-direction, (b) tracking trajectory of β-angle, (c) tracking error in z-direction, and (d) tracking error of β-angle. Maximum absolute values of the sliding variables. GNASTW: global robust STW with adaptive switching gain.


Remark 8
Define
As shown in Figure 3 and Table 2, the sliding variable values of the GNASTW are smaller than those of the NASTW in the initial phase. From Figure 4, it can be known that the mean square errors of the link rod midpoint are
2. Contrast and analysis of control performance between the GNASTW and the GSMASTW:
The expected trajectory has been given as the equation (31) after presenting the dynamic model of the hybrid robot for automobile electro-coating conveying which contains uncertainties. The modeling errors are set as

Curves of switching gains: (a)
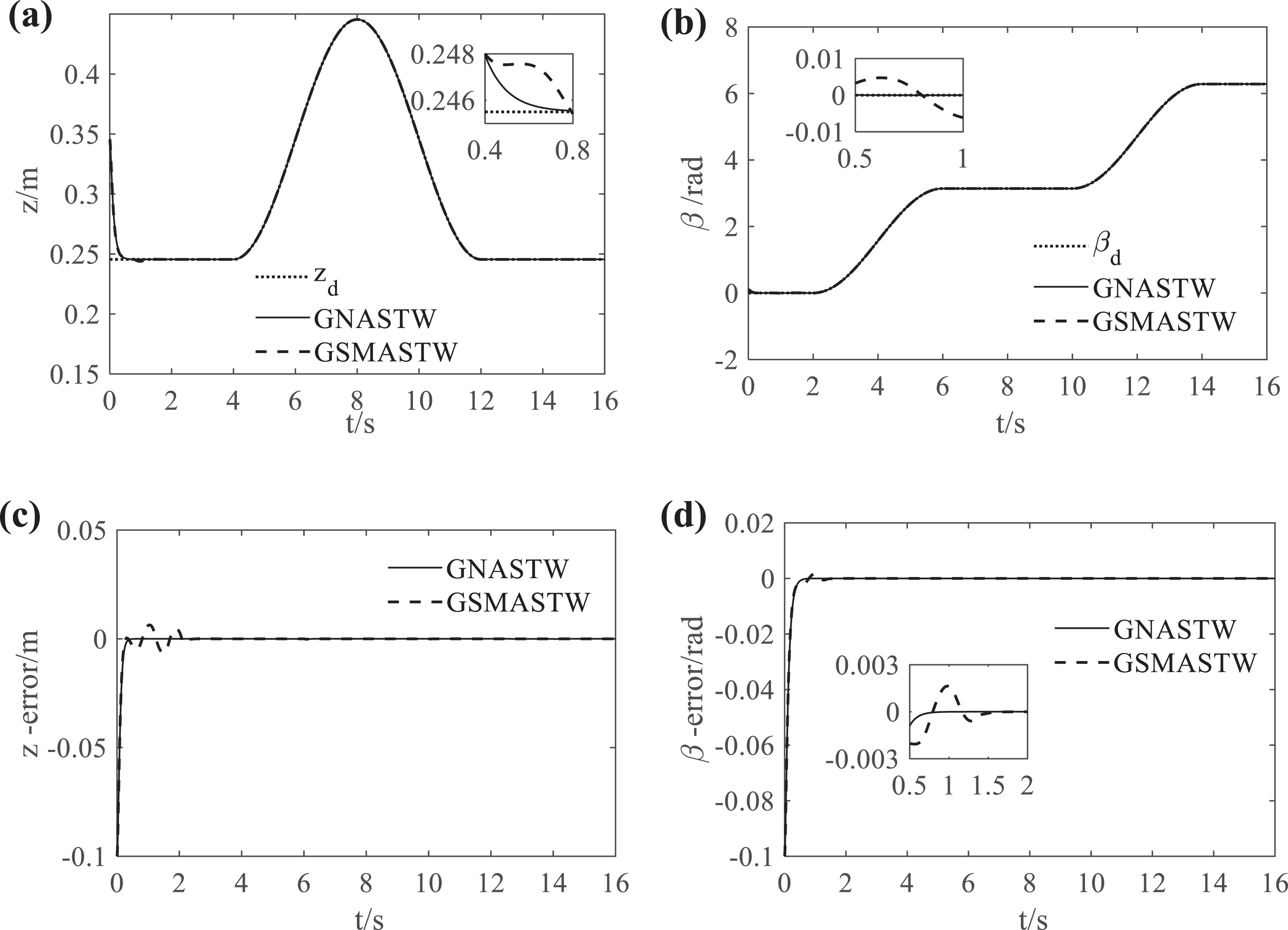
Tracking results of the link rod midpoint: (a) tracking trajectory in z-direction, (b) tracking trajectory of β-angle, (c) tracking error in z-direction, and (d) tracking error of β-angle.

Control inputs of the unilateral active joints: (a) driving force of the first slider, (b) driving force of the second slider, and (c) driving torque of the active wheel.
Prototype experimental results
Maximum and average of the switching gains.

GNASTW: global robust STW with adaptive switching gain; GSMASTW: global robust STW with adaptive law about sliding variable; MSG: maximum of the switching gains; ASG: average of the switching gains.
Figure 5 shows that, compared with the GSMASTW, the switching term in the GNASTW can adapt to the uncertain term when the uncertain term is larger than the switching term. The reason for this is that the adaptive law designed in this article can adjust the changing direction of the switching gains via judging the size of the uncertain term and the switching term in real time. Besides, from Table 3, the average of the switching gains in GNASTW is smaller than that in GSMASTW. The reason for this is that the proposed adaptive law for the switching gains is directly designed according to the equivalent value of the uncertain term, which can achieve the minimum admissible switching gains.
As can be seen from Figure 6, both the GNASTW method and the NASTW method have good tracking performance, and the mean square errors of the link rod midpoint are
The lifting and turnover part of the prototype is a bilaterally symmetrical structure with the same motion of the corresponding joints on both sides. Therefore, as shown in Figure 7, only the control input curves of the unilateral active joints are given.
Figure 7 shows that the chattering amplitude of the three active joint control inputs on one side of the lifting and turnover part in the GNASTW is significantly smaller than that in the GSMASTW. The reason for this is that the fast acquisition and minimization of the switching gains in the GNASTW can effectively reduce the chattering caused by the conservatively obtained switching gains.
Therefore, it can be concluded that the global robust STW method with adaptive switching gains proposed in this article has better robustness performance, which ensures the global robustness, suppresses the chattering significantly, and then ameliorates the control performance in the system.
For further verification of the effectiveness, the global robust STW algorithm with adaptive switching gains proposed in this article was performed on the hybrid robot prototype for automobile electro-coating conveying. Figure 8 shows the distributed computer control system of the prototype with two main parts: PC (the host computer) and UMAC (the slave computer).
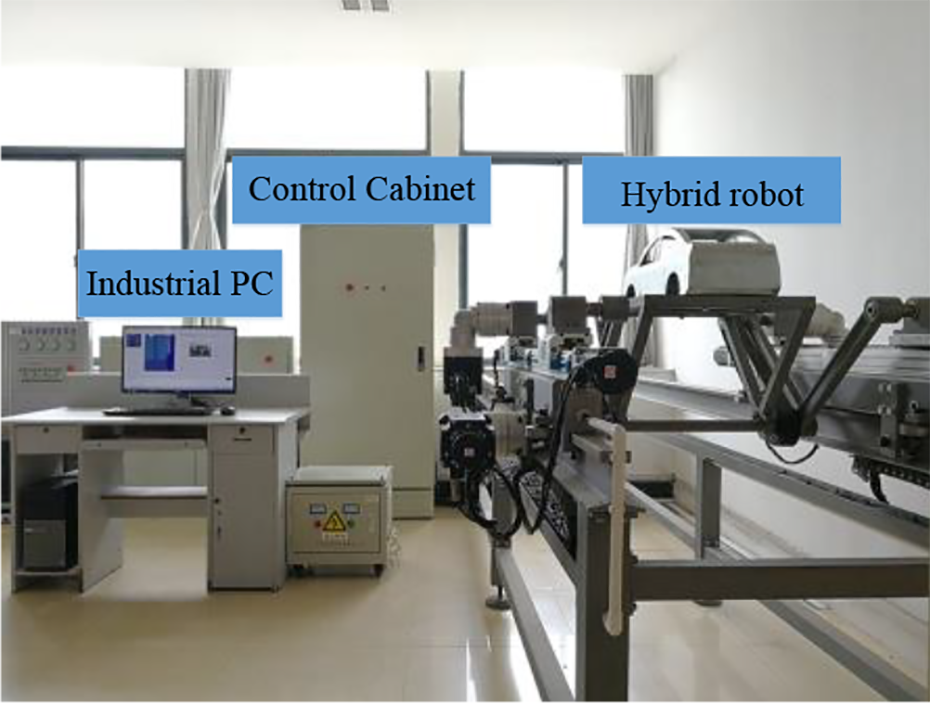
Prototype system of the hybrid robot for automobile electro-coating conveying.
Comparative experiment among the proposed global robust STW controller with adaptive switching gains, the global robust STW controller with adaptive law about sliding variable, and the STW controller with adaptive switching gains has been performed. Specifically, the desired trajectory shown in equation (31) meets the requirements of coating process and actual operation of the mechanism. Therefore, in order to facilitate analysis, the expected trajectory in the experiment is the same as that in the simulation. Figure 9 and Table 4 are the experimental results, which further demonstrate the good robustness performance of the proposed method to the time-varying uncertainties without the upper bound information in a hybrid robot system.

Experimental results: (a) tracking error in z-direction and (b) tracking error of β-angle.
Maximum tracking error of the link rod midpoint.

GNASTW: global robust STW with adaptive switching gain; GSMASTW: global robust STW with adaptive law about sliding variable.
Conclusions and future work
A global robust STW method with adaptive switching gains is developed for the hybrid robot with time-varying uncertainties. And the robustness performance of dynamic SMC to the hybrid robot system is improved when the upper bound information of the uncertainties is unknown. The main conclusions are as follows: A global robust sliding surface for the STW is designed, and the global robustness of the hybrid robot control system is ensured. A fast-adaptive law for the STW switching gains is proposed, and chattering is suppressed significantly on the premise of ensuring the robustness of the hybrid robot control system. The proposed method is applied to the prototype system, and the correctness and effectiveness of the method are verified via comparative simulation and experiment.
The future work will focus on finding a way to facilitate the selection of the proposed controller’s parameters.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant no. 51375210), the Zhenjiang Municipal Key Research and Development Program (Grant no. GZ2018004), the Priority Academic Program Development of Jiangsu Higher Education Institutions (Grant no. PAPD-2018-87), and the Jiangsu Graduate Research Innovation Program (Grant no. KYCX18_2252).