
Abstract
When carrier phase observations are applied to high-precision positioning, how to handle the cycle slip is an unavoidable problem. For cycle slip correction, detection combination noise and the ionospheric delay are two crucial factors. Specifically, the drastic changes in the ionosphere and the increased noise of code observations will increase the failure probability of cycle slip detection. To reduce the influence of code observation noise and ionospheric bias, a novel cycle slip detection method for BDS-3 satellites is proposed. Considering that code measurement noise is closely related to the satellite elevation angle, an elevation-based model is built to evaluate the code measurement noise. Firstly, two modified code-phase combinations are selected optimally based on 1% missed detection rate and 99% success detection rate to minimize the effects of code measurement noise. However, the second modified code-phase combination is more affected by ionospheric delay bias, so ionospheric bias of current epoch needs to be corrected. To reduce the influence of ionospheric bias, two moving windows of time-differenced ionospheric delay are introduced to correct the ionospheric bias of the second code-phase combination. Experiments with BeiDou-3 data are implemented in three different scenarios. To verify the effectiveness of the algorithm in the environment of high code observations noise, Gaussian noise is added to the code observations in the first scenario, and the results demonstrate that the success rate of cycle slip detection and repair is still greater than 95% when the standard deviation of Gaussian noise is 0.8 m. The second scenario is carried out under low ionospheric activity, and results indicate that the proposed method significantly reduces the times of failed detection and repair. Moreover, in the third scenario, BeiDou-3 data with cycle slips of different types under high ionospheric activity are tested, and all cycle slips can be correctly detected and corrected.
Keywords
Introduction
Global navigation satellite system (GNSS) plays an important role in military confrontations, 1 transportation, 2 –4 and measurement. 5 The Chinese BeiDou Navigation Satellite System (BDS) includes regional system (BDS-2) and global system (BDS-3). BDS-2 has already been accomplished in 2012 and triple-frequency signals can be transmitted by all satellites. 6,7 BDS-3 can provide global services and it is expected to be completely built in 2020. The release of four signals including B1I, B3I, B1C, and B2a is beneficial to the ambiguity resolution, cycle slip detection, and high-precision positioning. 6
Millimeter precision is the advantage of carrier phase observations compared to code observations. However, the existence of cycle slips is an unavoidable problem in the application of carrier phase observations. Cycle slips often occur in poor environment, such as signal interruption and interference. The quality of satellite data preprocessing is directly related to the accuracy and reliability of navigation and positioning. If cycle slips are ignored or cannot be correctly repaired, it will bring deviations to the ultimate results.
For cycle slip detection, the basic idea is to obtain a sequence of detections that reflects the change of the cycle slip, and the position of the cycle slip can be determined from the detection sequence. For single-frequency observations, Beutler et al. 8 proposed a polynomial fitting method to detect cycle slip. Meanwhile Hofmann et al. 9 put forward a high-order inter-epoch phase differentiation method. However, they need several observations from previous epochs for detection. Zangeneh-Nejad et al. 10 improved the single-frequency GPS cycle slip correction method, which is based on the generalized likelihood ratio test. Momoh et al. 11 proposed to detect cycle slip through the adaptive difference sequences of observations, which can achieve single-frequency cycle slip detection and correction with the slips of one cycle.
For GPS dual-frequency data, Hatch–Melbourne–Wübbena (HMW) combinations 12 –14 are extensively applied in cycle slip detection due to their excellent characteristics. Blewitt 15 developed the Turbo Edit algorithm and used undifferenced observations to detect cycle slip. Specifically, Turbo Edit algorithm consists of ionospheric combination and HMW combination. Considering the gross error of code observations may result in a wrong detection result, a method is proposed by Li et al., 16 which is relied on satellite orbit and smoothed code observations. Ionospheric total electron contents rate (TECR) method was proposed by Liu, 17 which was based on smoothly changing ionosphere. However, the TECR method does not work well under high ionospheric activity. To solve this problem, Cai et al. 18 proposed improved TurboEdit method, which based on the second-order, time-difference phase ionospheric residual (STPIR) algorithm, and the proposed approach was able to determine the cycle slip of each signal under high ionospheric activities. Banville and Langley 19 developed the dual-frequency model, and least-squares adjustment was adopted to reduce the impact of the ionosphere in the case of ionospheric disturbance. Hu et al. 20 improved Turbo Edit algorithm and a polynomial function to fit the ionospheric delays in short times.
Up to now, many satellites have supported the transmission of triple-frequency signals, which benefits ambiguity resolution 21,22 and cycle slip detection. Triple-frequency signals can present more high-performance observation combinations with longer wavelengths, lower noise, and ionospheric errors. For GPS triple-frequency observations, Dai et al. 23 constructed geometry-free (GF) phase observations as detection sequence. De Lacy et al. 24 proposed a real-time detection method and five first-order time-difference GF linear combinations were selected to detect different types of cycle slips. Zhao et al. 25 and Gu and Zhu 26 extended three carrier ambiguity resolution algorithm from ambiguity resolution to cycle slip correction, and extra-wide-lane, wide-lane, and narrow-lane (NL) combinations are utilized to determine cycle slip.
For BDS-2 triple-frequency cycle slip detection, three GF combinations are used by Huang et al.
27
to determine the position of the cycle slip, and the size of the cycle slip will be determined by least-squares ambiguity decorrelation adjustment.
28
Xiao et al.
29
modified the geometry-based detection model and a new strategy was put forward to reduce false alarms. Zeng et al.
30
divided the special cycle slip groups into two types and used three GF linear combinations which were collected to detect and repair. Li and Melachroinos
31
proposed an enhanced repair algorithm, and the real-time implementation can be realized by Kalman filter. To decrease the influence of code observation noise, Zhao et al.
32
improved the HMW combination and determined different coefficients for satellites of different orbital types. Xiao et al.
33
applied three GF combinations and 20° was applied as the threshold of the elevation angle to ensure a high success rate. To eliminate the bias of ionosphere, prediction functions were used by Yao et al.
34
and Li et al.
35
to predict ionospheric variation. Pu et al.
36
used moving window filter function to predict ionospheric variation, and the cycle slip will be re-search when the predicted value exceeds the threshold. Xiao et al.
33
used previous
In general, there are many methods for cycle slip detection; code measurement noise and ionospheric bias are two crucial factors. Many methods assumed that code measurement noise is constant; however, code measurement noise will significantly increase when the satellite elevation angle becomes lower. 38 Based on the assumption that the ionosphere changes smoothly, the failure probability of cycle slip detection will increase. Therefore, a new method for cycle slip detection and correction is presented in this article. Firstly, in order to evaluate the code measurement noise, an elevation-based model is built. Secondly, HMW combination is used as the first detection combination due to its extremely high success rate. To minimize the combined observation noise, two optimally code-phase combinations are selected. Then, in order to decrease the impact of ionospheric bias, two moving windows of time-differenced ionospheric delay are introduced to correct the ionospheric bias.
The structure of this article is as follows. Triple-frequency linear combination model is introduced in the second section. The third section analyzes the error affecting the detection of cycle slip, and elevation-based model is built. In fourth and fifth sections, three cycle slip detection combinations and corresponding coefficients are determined. In the sixth section, two moving windows are proposed to correct the ionospheric bias of the third detection combination. In the seventh section, the approach is tested in three different scenarios. Finally, conclusions are summarized in the last section. Appendix 1 shows all symbols and their definitions used in this article.
Triple-frequency linear combination
Code and phase observations at frequency fi


where P and Φ are code and phase observations, respectively. ρ denotes the geometric distance from satellite to receiver, and it is a frequency-independent item. c is the speed of light,
The triple-frequency carrier phase combination can be expressed as 21

where

The wavelength and integer ambiguity of the combination are


Error analysis
In the time-differenced model, the bias of troposphere, the clock error, and the hardware delay will be eliminated. However, the code measurement noise and the ionospheric bias are difficult to be eliminated by the time-differenced model, which are the main obstacle to the detection of cycle slip. To evaluate the code measurement noise and ionospheric bias, we analyzed the data of the six stations from International GNSS Service (IGS). The information of the six stations is listed in Table 1.
The information of the six stations from IGS.
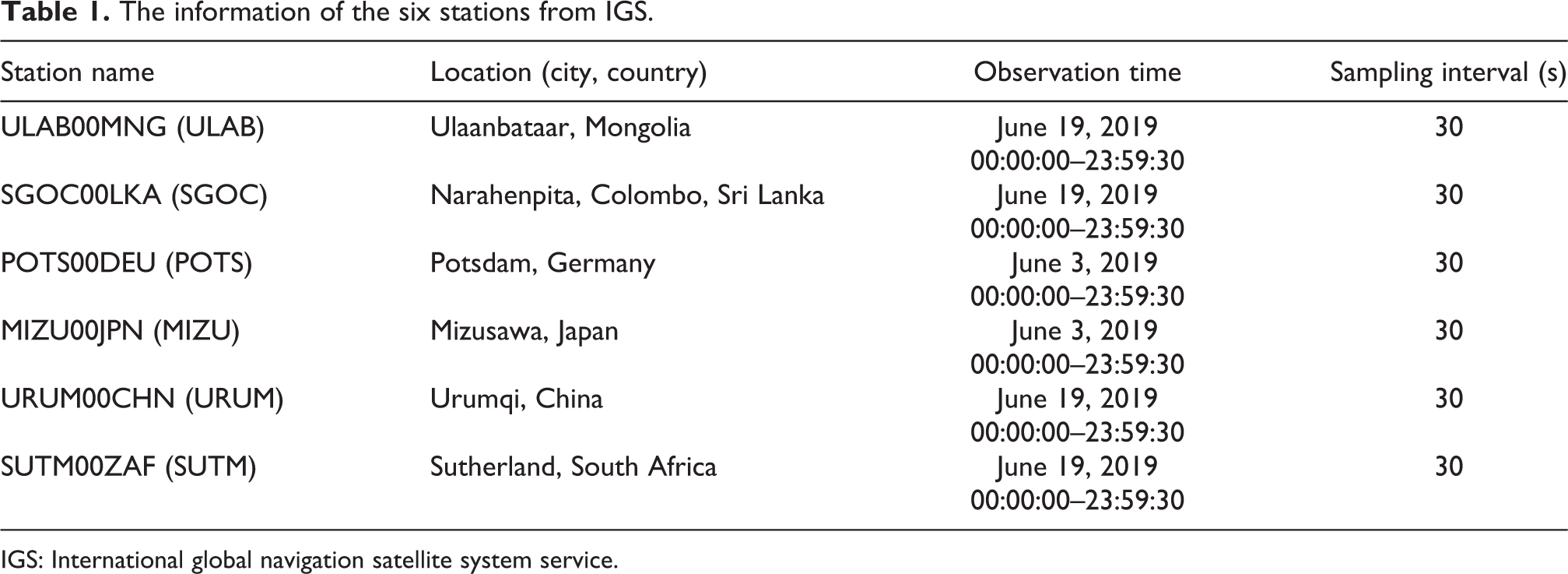
IGS: International global navigation satellite system service.
Satellite elevation-based measurement noise model of code observations
The measurement noise is correlated with observation environments, signal–noise ratio, and satellite elevation angle. Multipath effect is the main cause of the measurement noise. In this article, code multipath errors are used to evaluate code measurement noise. Multipath combination related to code range can be expressed as 40

where f is the frequency.
The standard deviation of multipath error corresponding to each elevation angle is selected to create multipath-elevation sequence for modeling.
By analyzing and processing real data of C20–C36 at six IGS stations, we obtain the elevation-based measurement noise model of code observations

where
Coefficients of satellite elevation-based model for BDS-3 satellites.

In this article, all of the carrier phase measurement noises
Time-differenced ionospheric delay
The ionospheric variation is a non-negligible factor for cycle slip detection. The ionospheric variation of two consecutive between-epoch on the B1C signal can be calculated as follows 25

where Δ denotes the first-order time-difference.
The second-order time-differenced ionospheric delay is

where
De Lacy et al.
24
considered

Standard deviation of
Figure 1 reflects the overall level of ionospheric variation within a day, and it shows that standard deviation of
Cycle slip detection combinations
First detection combination
The first detection combination is HMW combination. HMW combination is an optimal choice due to longer wavelength and higher reliability. In HMW combination, geometric distance, the bias of troposphere, and ionosphere will be eliminated. For HMW combination, the cycle slip can be accurately detected. HMW combination for BDS-3 satellites can be expressed as

where
By differencing equation (11) between adjacent epochs, the magnitude of the cycle slip can be derived as

where
The value of cycle slip can be easily determined, and HMW combination can be repaired immediately. The combined signal

Assuming

From Figure 2, we can know that

The success detection rate of the first detection combination.
Second and third detection combinations
The traditional code-phase cycle slip detection combination is defined as

where

where
Assuming

Standard deviations of measurement noises
From Figure 3, we can know that standard deviations of measurement noises

Determination of the second and third detection combinations
In this section, the second and third detection combinations and the corresponding coefficients will be determined. The level of the time-differenced ionospheric delay and combination noise must be considered when choosing the optimal detection combinations.
According to equations (4) and (16), the ionospheric delay bias of the second and third combinations can be derived as

where
We can obtain the noise of the second and third detection combinations as

Success detection rate and missed detection rate
Assuming
The missed detection rate PM represents the probability that the detection combination does not detect the existence of a cycle slip when cycle slip occurs, it can be indicated as 32

We analyzed the relationship among
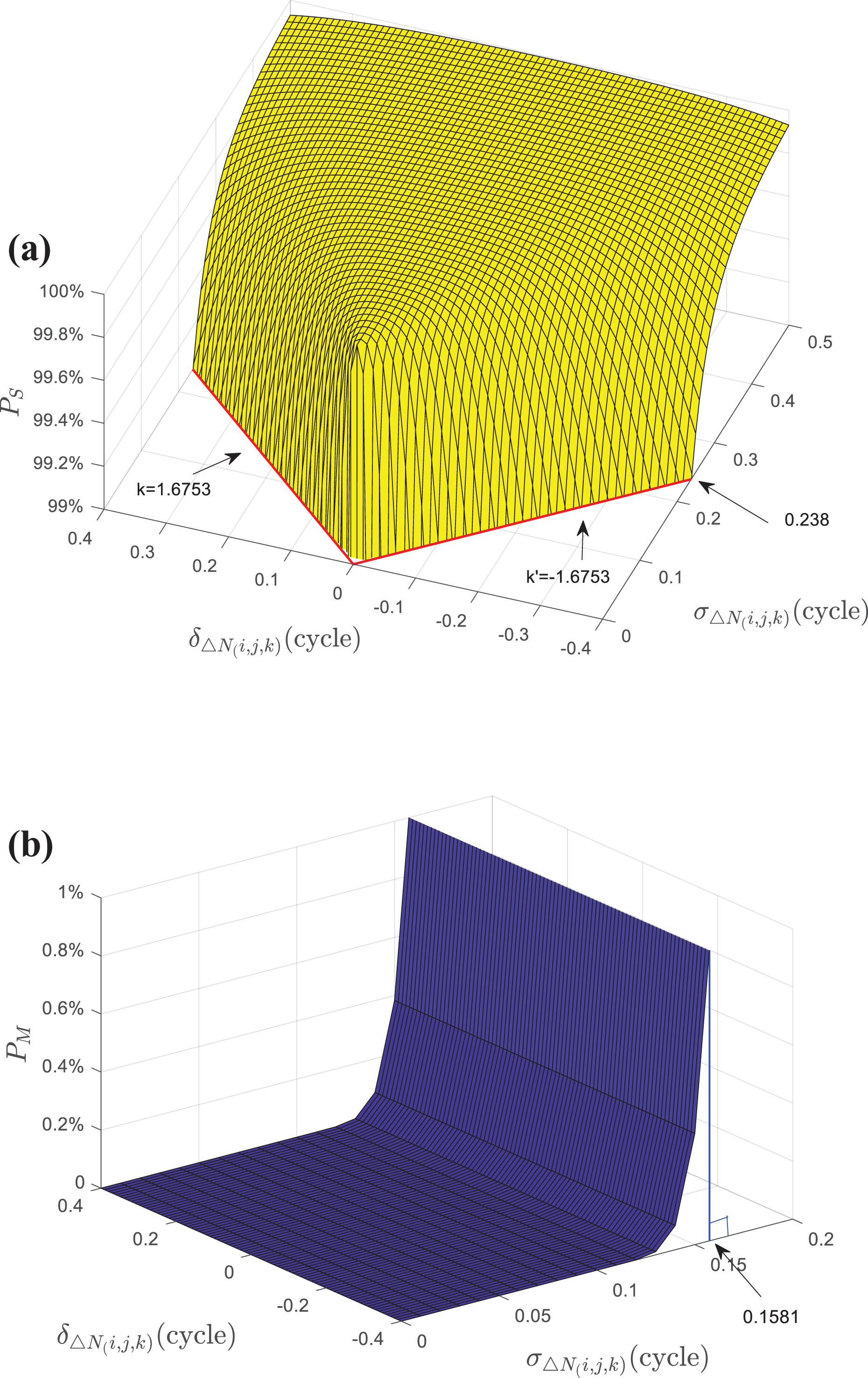
The three-dimensional relationship diagram. (a) The three-dimensional relationship diagram of
Figure 4(a) shows the relationship among

Figure 4(b) shows the relationship among

Selection of optimal detection combinations
According to the above analysis, 99% success detection rate and 1% missed detection rate are adopted as the selection criterion of the second and third detection combinations. Hence, the second and third detection combinations must satisfy equations (17), (22), and (23). In addition to these three conditions, the three detection combinations must be linearly independent. To select the optimal virtual signals

Flow diagram of selecting the optimally detection combinations and corresponding coefficients.
As shown in Figure 5, each group of
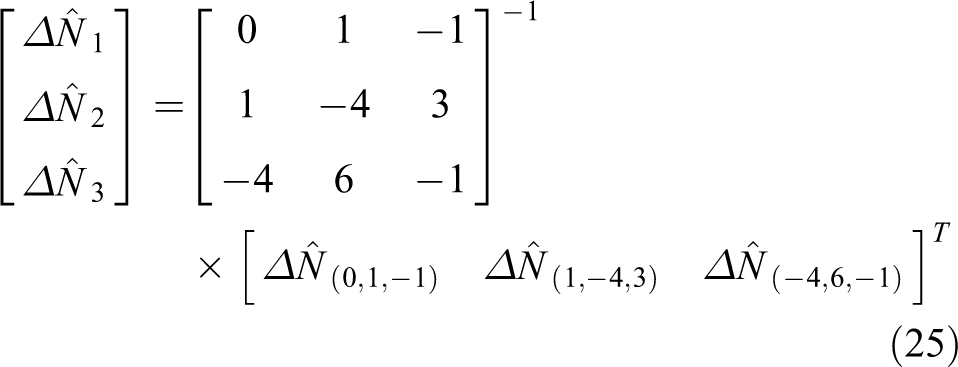
When the above process is completed, all possible combinations will be output. Notice that the three detection combinations must be linearly independent, so the signals (1, −4, 3) and (−4, 6, −1) are selected as the second and third detection combinations, respectively, and the specific results are shown in Table 3.
Coefficients, wavelengths, and ISF of the second and third detection combinations.

ISF: ionospheric scale factor.
Figure 6 shows PS and PM of the second and third detection combinations.

PS and PM of the second and third detection combinations. (a) The success detection rate. (b) The missed detection rate.
According to Figure 6, it is known that the success detection rate of the second detection combination (1, −4, 3) is close to 100%, and the missed detection rate is close to 0%. The second detection combination benefits from longer wavelength and smaller ISF, which are minimally affected by the code measurement noise and ionosphere. Due to shorter wavelength and larger ISF, the combined signal (−4, 6, −1) is more vulnerable to the ionospheric bias. When

Cycle slips of three phase observations can be derived as
Time-differenced ionospheric delay compensation algorithm based on moving windows
The precise value of
First moving window
The first moving window of

where
Second moving window
To evaluate

where
Process of compensating for ionospheric bias
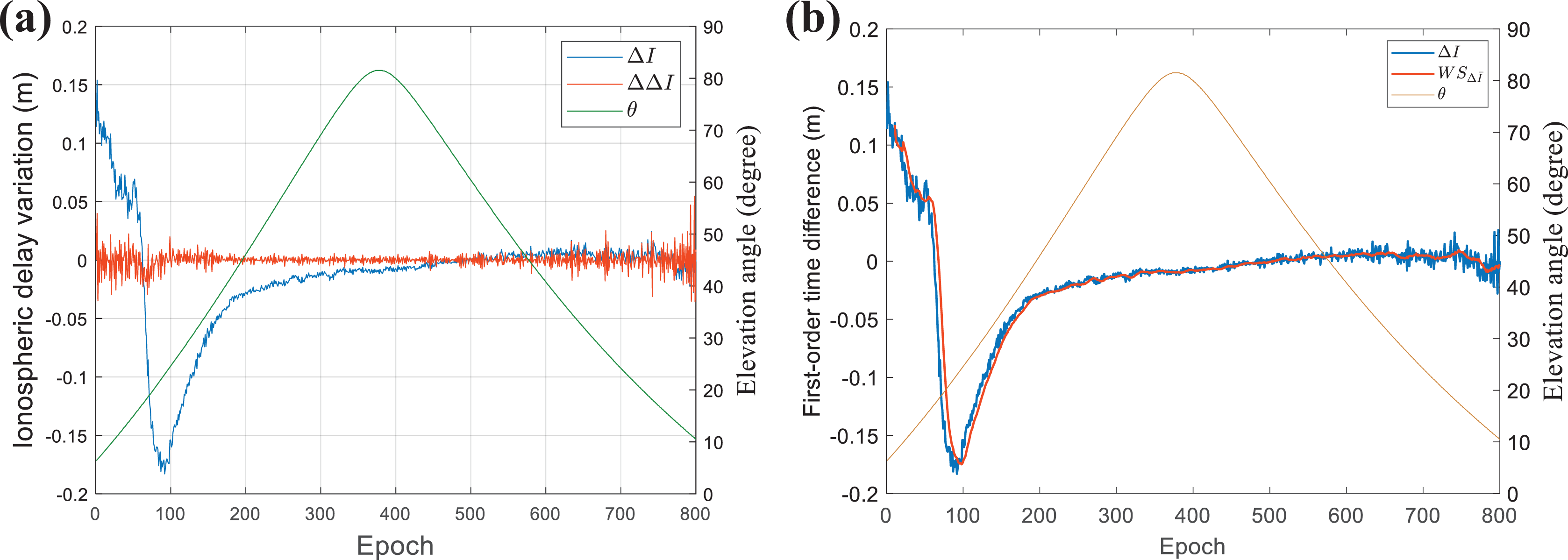
Figure 7 shows that the process of the third combination compensates for the ionospheric bias. When

The third combination compensates for the ionospheric bias.
Figure 8 shows

Numerical tests and analysis
To verify the effectiveness of our proposed approach, we test it in three different scenarios.
Test with simulated noise of code observations
In a poor observation environment, the noise of code observations will increase significantly. Due to the existence of code observation in the detection combination, the noise of code observations is bound to affect the detection of cycle slip. To test the ability of the proposed method to detect cycle slip in the case of high code observation noise, the noise is added to the original code observations. Gaussian noise with zero mean is added to the three code observations in the second experiment. We simulated two scenarios, in which the standard deviation of the added noise is 0.5 and 0.8 m, respectively. The data of BDS-3 satellites from SGOC, ULAB, and STUM stations on June 19, 2019 are used and the data are clean without cycle slip. The sampling interval is 30 s. At every 10 epochs, cycle slip groups from (0, 0, 0) to (2, 2, 2) will be added to the data in turn. The results of SGOC station are shown in Figure 9. Table 4 shows the total number of simulated cycle slips and the number of incorrect detection and repair.

The times of failed detection and correction for SGOC station. (a) Test using noise with standard deviation of 0.5 m. (b) Test using noise with standard deviation of 0.8 m. (c) Test under normal situation.
Cycle slips detection results of SGOC, SUTM, and ULAB stations.

In Table 4, scenario #1 is normal and no noise is added. Simulated noise is added to scenario #2 with standard deviation of 0.5 m. In scenario #3, simulated noise is added using noise with standard deviation of 0.8 m. Scenario #3 has higher noise level than scenario #2.
From Figure 9 and Table 4, we can know that the number of failures increases as the noise level increases, but the success rate is still greater than 95%. From Table 3, it is known that the code observations have a very small weight in the detection combination; hence, the proposed approach is less affected by code observations.
Test under normal circumstances
The second experiment was carried out under normal circumstances, the noise of code observations is at normal level, and the ionosphere changes slowly. We compare the proposed approach with the approach proposed by Zhao et al. 32 They used three code-phase combinations to detect and correct cycle slip, and in order to eliminate the ionospheric bias in the third combination, they propose

where
The real BDS-3 data from SGOC station on June 19, 2019 are used to test the effectiveness of these two methods. The original observations have been repaired and have no cycle slips beforehand. Cycle slip groups from (0, 0, 0) to (2, 2, 2) are added to the data in turn, at every 10 epochs. The sampling interval is 30 s. The approach of Zhao et al.
32
is tested when

In Figure 10, the graph consisting of two red triangles and a green square represents failure of detection and repair. The number in the right coordinate area represents the times of failed detection and correction. As shown in Figure 10, the times of failed detection and correction in Figure 9(a) have a significant reduction compared with Figure 10(a) to (c). Therefore, the method proposed by this article has stronger ability to eliminate the effect of ionospheric bias. From Figure 10, it can be known that all of the failed detection and repair of cycle slip occurs at low elevation angle. At low elevation angles, the ionospheric bias and code measurement noise may increase. If the ionospheric bias cannot be handled correctly, it will lead to erroneous results.
Test under high ionospheric activity
In theory, as long as the prediction of
(a)
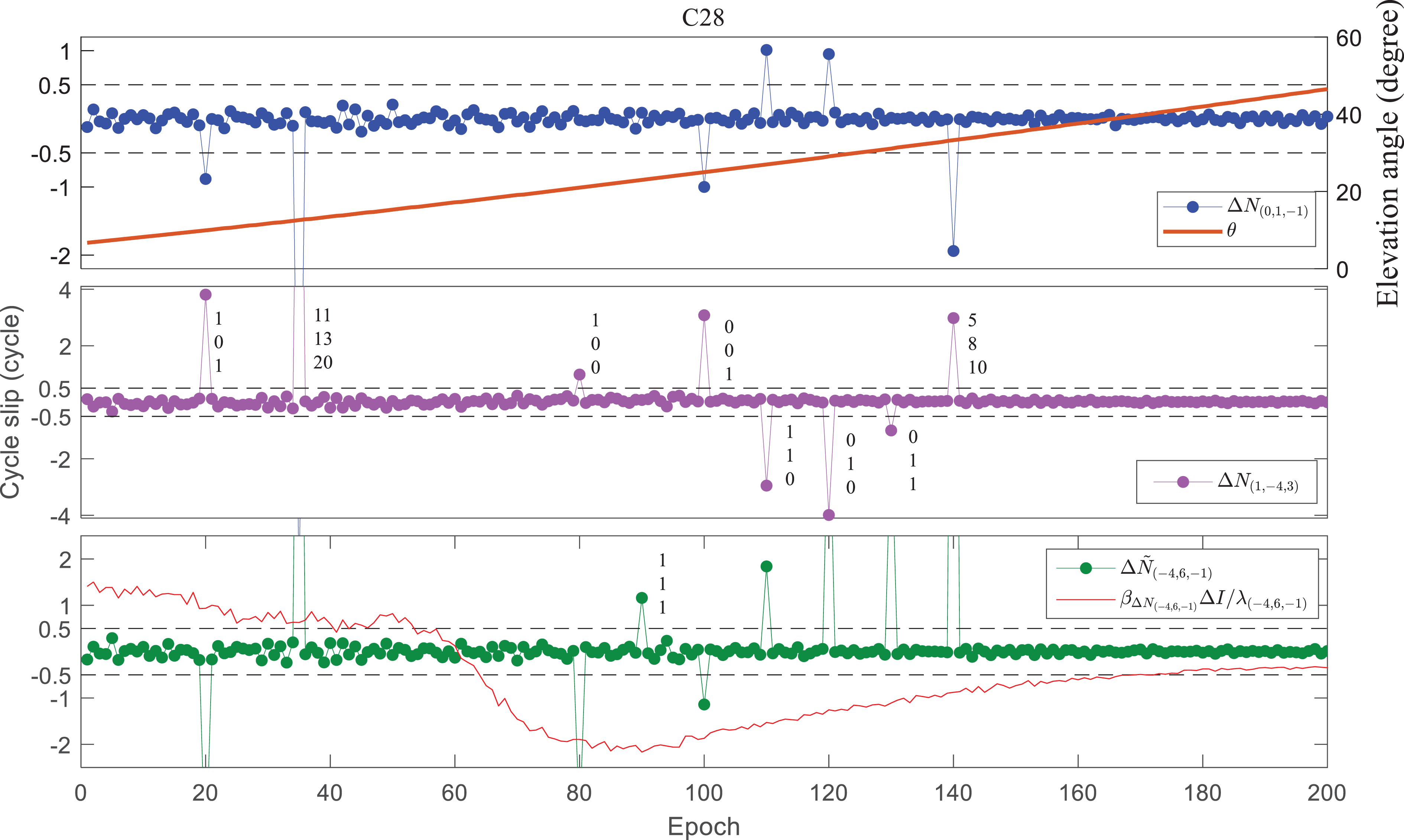
Cycle slips detection of C28 with simulated cycle slips.
Added cycle slips epoch, type, and detection results.

Small, particular, and large cycle slips are simulated in the third experiment. In Figure 12,
From Figure 12 and Table 5, we can know that cycle slips (1, 0, 0), (1, 1, 1), and (0, 1, 1) are insensitive for the first detection combination (0, 1, −1). The second detection combination cannot detect cycle slip (1, 1, 1). However, all cycle slips can be detected with the combined three combinations.
Conclusions
A new method of cycle slip detection and repair for BDS-3 triple-frequency observations is proposed. Firstly, two modified code-phase combinations are used to minimize the effect of noise of code measurement. Then, 1% missed detection rate and 99% success detection rate are used as the criterion to optimally select the second and third detection combinations by combining BDS elevation-based model and HMW combination. Since the third detection combination is easily biased by ionosphere, two moving windows are used to correct the ionospheric bias of the third combination. The method has been tested in three different scenarios. In the first scenario, simulated Gaussian noise is added to the three code observations and the proposed method is still effective in the environment of high code observation noise. Compared with the method proposed by Zhao et al., 32 the proposed method has obvious advantages in reducing the times of failed detection and correction. From the first and second experiments, we can know that most of the detection failures occur at low elevation angles. We can increase the cutoff elevation angle of satellites to reduce the times of failed detection and repair. Further, BDS-3 data under high ionospheric activity is used to verify the validity of the algorithm, cycle slips of different types are added to the original carrier phase observations, and all cycle slips can be correctly detected and fixed.
Footnotes
Acknowledgement
The authors would like to thank the National Natural Science Foundation of China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (no. 41574010).
Appendix 1
All symbols and their definitions used in this article are shown in the following table.