
Abstract
The robotic articulated arm coordinate measuring machine (RAACMM) is a special robotic structural measuring instrument used to perform industrial field inspection. The accuracy of a RAACMM in different poses presents certain characteristics due to the influence of various dynamic factors. However, the existing error compensation model of the RAACMM cannot include dynamic factors, which imposes certain limits on improving the accuracy of the RAACMM. In this article, a residual correction method for the RAACMM based on a radial basis function neural network (RBFNN) is proposed to compensate the dynamic factors and improve the accuracy of the RAACMM. Firstly, the influence of the pose configuration of the RAACMM on the residual error of the probe is analyzed. The periodic characteristics of the residual error are obtained based on the analysis results. Secondly, a relationship model between the residual errors and the structural parameters is established in the cylindrical coordinate system. Then, a residual correction model based on the single point repeatability and RBFNN is proposed to further enhance the accuracy of the RAACMM. The probe of the RAACMM is constrained with a cone-hole gauge to acquire the single point repeatability data. The residual correction model is trained with the data of single point repeatability, and residual errors are calculated via the residual correction model. Experimental results show that the repeatability and measurement accuracy of the RAACMM are all improved after the residual correction, which validates the effectiveness of the residual correction method.
Keywords
Introduction
Robotic articulated arm coordinate measuring machines (RAACMMs), as specific robots, are widely applied in industrial fields, for example, in automobile manufacturing and product quality control, owing to the advantages of fast operation, high efficiency, and high flexibility. 1,2 However, the accuracy of RAACMMs is relatively lower than traditional coordinate measuring machines, which limits the application of RAACMMs in high-precision industrial fields. The main factors affecting the accuracy of RAACMMs can be divided into static factors and dynamic factors. The static factors mainly include the errors of structural parameters and joint angle variables of the kinematic model. In this respect, the accuracy of RAACMMs can be improved by applying the kinematic calibration. 3,4 In kinematic calibration of RAACMM and industrial robots, the optimum kinematic parameters can be obtained by parameter identification calculation, 5 –7 which can be used to compensate the corresponding kinematic parameters in the controllers. Therefore, the movement accuracy can be improved.
However, the accuracy of RAACMM will vary regularly at different poses due to the gravity, inertia, joint flexible deformation, thermal deformation, and other factors. These factors are dynamic factors in contrast to the static factors mainly composed of kinematic parameters. Dynamic factors are more complex than static factors, and their influence on the accuracy of RAACMM also involves couplings. In this case, if we consider each dynamic factor independently to establish the compensation model for RAACMM, the derived model could be very complex, which may be difficult to use in practice.
Moreover, different joint angles, linkage lengths, and kinematic parameters of the RAACMM can determine different configurations. 8 Because the accuracy of the RAACMM displays some certain characteristics in different configurations and these characteristics are related to the dynamic factors affecting the accuracy of the RAACMM, these dynamic factors can be included in the relationship between the accuracy and configurations of the RAACMM.
Pikov and Siegel 9 analyzed the influence of dynamic factors on the movement error of robots and showed the movement error distribution of a robot. However, they did not present the error compensation method to improve the movement accuracy for robots. Xu et al. 10 proposed a method to describe the relationship between the joint angles and the residuals of multi-joint measuring instruments and established a database to modify residuals. However, it is not practical for RAACMM to deal with real-time information owing to the data scanning and large memory capacity. Xiong et al. 11 analyzed the relationship between the joint angles of the RAACMMs and the single-point position accuracy in the Cartesian coordinate system and presented a method to improve the measurement accuracy in a certain range according to the relationship model. The work by Bing et al. 12 improved the polynomials on the basis of the work by Xiong et al. 11 and presented the periodic characteristics of key parameters affecting the accuracy of the RAACMM. However, they are all based on polynomials; thus, many dynamic factors affecting the accuracy of the RAACMM are not considered comprehensively.
It is also noted that these methods for improving the accuracy of the RAACMM given in the above works are mainly based on the polynomial fitting to correct residuals. However, there are various dynamic factors that can result in residuals, for example, stress deformation, thermal deformation, and joint eccentricity. It is not practical for existing polynomials to include all these dynamic factors. 13
Inspired by the previous discussions, we propose a residual correction method for RAACMMs based on a radial basis function neural network (RBFNN) in this article. To model the relationship of the poses and the probe’s coordinates of RAACMM, we first introduce the kinematic model of RAACMMs. Then the main factors affecting the residuals of RAACMMs are analyzed to model residuals and poses. An external constrain method with cone-hole gauges is proposed to acquire data for the residual correction. There is a cone-hole in a gauge, which is designed to hold the probe of the RAACMM for the single point data acquisition and verification. Experimental results based on a RAACMM are presented to show the efficacy of the proposed method.
The main contributions of this article can be summarized as follows: By exploring the relationship of pose configurations and residual errors of RAACMM, we get the periodic characteristics of the residual error, which provide theoretical basis for the residual correction modeling. A model including residual errors and poses of RAACMMs is established for improving the repeatability and length measurement accuracy of RAACMMs. A cone-hole gauge is designed to constrain the probe of RAACMM for data acquisition.
Residual modeling for RAACMM
Kinematic modeling
As shown in Figure 1, the RAACMM is a typical kind of articulated robots, which is composed of six joints, two linkages, and one base. To obtain the coordinates of the probe of RAACMM, coordinate systems for the joints are established as shown in Figure 2. According to Figure 2, we can obtain the coordinates of the probe by homogeneous transformations 14 as:

where i denotes the number of joint of the RAACMM; x, y, and z denote the three coordinates of the probe; α, θ, a, d, and l denote the twist angle, rotation angle, joint length, linkage length, and probe length, respectively.

The structure layout of the RAACMM. RAACMM: robotic articulated arm coordinate measuring machine.

Coordinate systems of the RAACMM. RAACMM: robotic articulated arm coordinate measuring machine.
Since RAACMM is a kind of serial open kinematic chain mechanisms, its movement accuracy is affected greatly by the error accumulation of the structural parameters. 15 In particular, the longer the linkages are, the greater the effect will be. From Figures 1 and 2, we can know that the main linkages are linkage 1 and linkage 2, which are between joints 2 and 3 and joints 4 and 5, respectively. If the O2 and O5 in Figure 2 are constrained in a fixed position and move joint 4, we will obtain a close kinematic chain which can be used for studying the relationship between the residuals and the poses of RAACMM.
Relationship between residuals and poses
As shown in Figure 3, when the position of O5 is constrained, its coordinates (x o5, y o5, z o5) can be obtained by the inverse position solution. According to the coordinates of O5 (x o5, y o5, z o5) and O2 (x o2, y o2, z o2), Dis, the distance of O2 and O5, which indicates the constrained movement space of the RAACMM, can be calculated by (2)

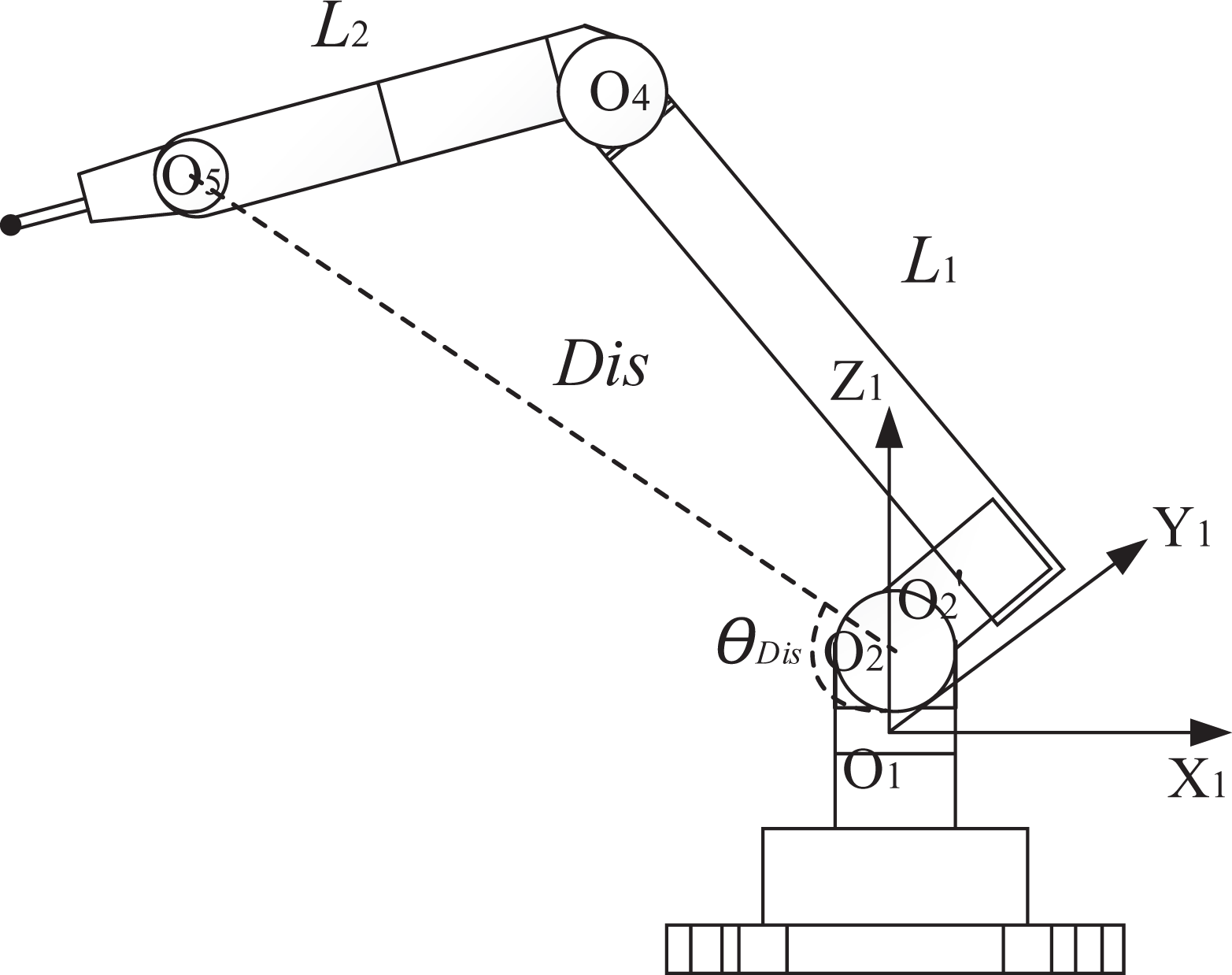
The structural configuration of the RAACMM. RAACMM: robotic articulated arm coordinate measuring machine.
Then, the rotation angle of the joint 4 can be deduced by (3)

where γ denotes the rotation angle of joint 4, L 1 and L 2 denote the length of linkage 1 and linkage 2, respectively.
In the coordinate system O1X1Y1Z1, the elevation angle of θ Dis, the angle between O1O2, and O2O5 can be calculated by (4) according to (2) and (3)

where

and

Considering that the base of the RAACMM is isotropic, the residual of the system can be transformed into the tangential, radial, and height residuals in the cylindrical coordinate system, that is Δs, Δh, and Δz, as shown in Figures 4 and 5.

Front view of residuals of the RAACMM. RAACMM: robotic articulated arm coordinate measuring machine.

Top view of residuals of the RAACMM. RAACMM: robotic articulated arm coordinate measuring machine.
According to the analysis above, the poses of RAACMM are determined by the rotation angles of joints 3 and 4, that is, θ 3, θ 4, and the elevation angle θ Dis. Some of existing works show that the poses of RAACMM has a mapping relationship with the residuals, 10 which can be written as

As per the discussions given in the introduction, the polynomial fitting is mainly used for compensating the residuals of inertia measuring force and gravity of the RAACMM. 12 However, there are more dynamic factors (e.g. flexible deformation of joints and linkages, eccentricity error of encoders, etc.) than inertia measuring force and gravity, which cannot be included in the polynomial fitting residual correction model. Therefore, we establish a residual correction model based on RBFNN to include these dynamic factors that cannot be modeled in the residual correction model.
Residual correction modeling and data acquisition based on RBFNN
Radial basis function (RBF) is a numerical method for solving the interpolation problems. 16 It uses symmetric functions to transform the multivariate data approximation problems into the essentially unified approximation problems. In 1988, Broomhead and Lowe proposed an RBF-based neural network, which can approximate any continuous function with arbitrary accuracy and have a very fast learning convergence rate. Consequently, it has been successfully applied in the function approximation, image processing, pattern recognition, fault diagnosis, predictive control, and other fields. 17,18
As shown in Figure 6, the residual correction model is established according to RBFNN with an input layer, a hidden layer, and an output layer. There are three neurons in the input layer, which are the pose of RAACMM, that is, θ 3, θ 4, and θ Dis. The three neurons in the output layer are the residuals, that is, Δs, Δh, and Δz.

Topology of the residual correction based on RBFNN. RBFNN: radial basis function neural network.
In Figure 6,

where σ is the variance between the expected output and the actual output of samples, which can be written as

where
According to the mapping condition obtained by equation (7), a residual correction method based on the RBFNN is proposed in this article. The steps to construct the residual correction model are as follows: 1) Data acquisition: In the measurement space of RAACMM, the horizontal plane of the base is taken as a reference, and several positions are selected within 20–80% of the radial measurement direction of RAACMM. One cone-hole used for single point data acquisition is placed in these positions. The data of θ
3 and θ
4, which are the value of joints 3 and 4 of the RAACMM, can be obtained from joint encoders. The coordinates of the probe and θ
Dis can be calculated by equations (1) and (4), respectively. 2) Residual calculation: The average value (xa, ya, za
) of the acquired single-point data and the coordinates (xi, yi, zi
) of each value are used as the reference data. According to equation (7), the residual of Δsi, Δhi,
and Δzi
can be calculated by (10)
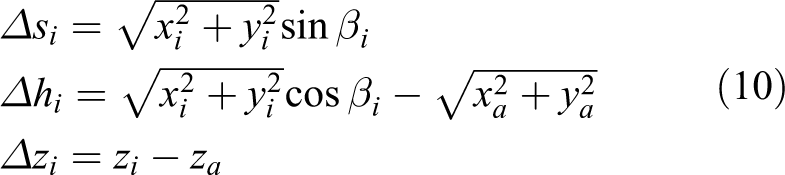
where
3) Compensation calculation: To improve the accuracy of the RAACMM, the compensation value (Δxi , Δyi , Δzi ) for the coordinate (xi , yi , zi ) of the probe should be calculated by the residuals. According to the relationship of cylindrical coordinate system and Cartesian coordinates, the compensation value can be calculated by equation (11)
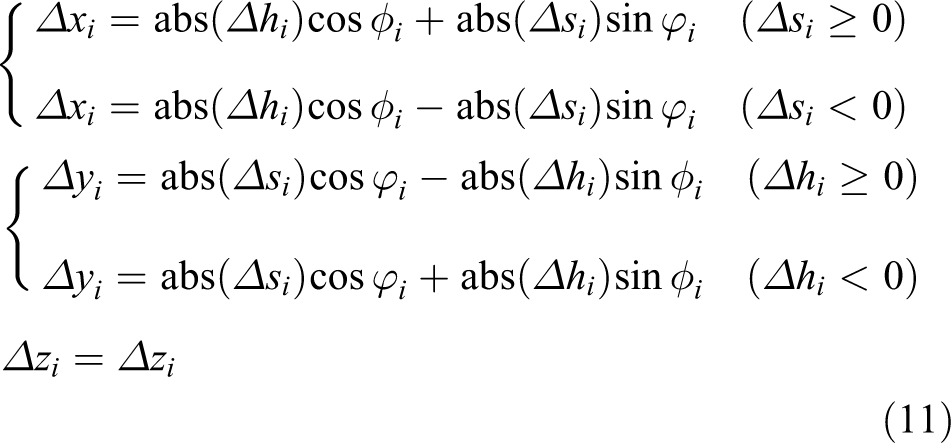
where
4) Training of the residual correction model based on RBFNN: With data of (θ 3 , i, θ 4 , i ,θ Dis,i ) as the input and (Δxi , Δyi , Δzi ) as the output obtained in the above steps, the RBFNN is trained to reach a residual correction model which will be used to predict the residuals for the compensation.
5) Compensation: Equations (12) to (14) can be used for compensation for the coordinates of the RAACMM with the predicted residual from the trained RBFNN



The calculation of residuals and coordinate compensation flow is shown in Figure 7.

The flow chart of the residual correction method.
Experimental verification
An RAACMM is used in the experimental tests to verify the efficiency of the residual correction method, as shown in Figure 8. The kinematic parameters of the RAACMM are presented in Table 1, which are from the identification procedure of calibration. The kinematic parameters will be used to calculate the coordinates of the probe with equation (1). In this section, the training data will be acquired firstly. Then, the trained residual correction model based on RBFNN will be used to compensate the error of the RAACMM. Single-point repeatability and length accuracy are the two accuracy indexes in ASME B89.4.22-2004 and JJF 1408-2013, which are the acceptance criteria standards for RAACMMs in the United States and China, respectively. Therefore, the two indexes will be compared with the values before and after residual compensation to test the efficiency of the method.

The RAACMM used in the experimental tests. RAACMM: robotic articulated arm coordinate measuring machine.
Kinematic parameters of the RAACMM.

RAACMM: robotic articulated arm coordinate measuring machine.
Data acquisition and training for RBFNN
We use a cone-hole gauge (Figure 9) as the constrained tool to acquire the training data for the residual correction model based on RBFNN. There are several precision planes, cylinders, and cones in the gauge which can be used for accuracy tests for measuring instruments. The angles of the six joints of the RAACMM can be obtained directly from the encoders installed at the joints. From one group of angles, the coordinates of the RAACMM and the input data of the RBFNN can be calculated by equations (1) and (4), respectively. The output data of the RBFNN can be obtained through equation (10). Then, the compensation value can be calculated by equation (11).

The cone-hole gauge used in the experimental tests.
In the procedure of data acquisition, the cone-hole gauge is put in several positions and the RAACMM should be moved in multiple directions within its joint space as much as possible to obtain enough comprehensive data.
At each position, 300 groups of data will be acquired, and the data will be used for training the residual correction model. Moreover, another 300 groups of data will be obtained at a new position, which will be used for verification of the prediction ability of the residual correction model.
After training with the acquired data, the model will be used to compensate the residual of the RAACMM. Furthermore, the efficiency will be tested.
Repeatability test
Single-point repeatability is one of the two main accuracy indexes, which is obtained by keeping the probe of the RAACMM in a cone-hole and rotating the joints in different directions. In the process of rotating, the position of the probe’s center is never changed in the case that the cone-hole and probe is precise enough. Therefore, the coordinates of the probe should be unchanged theoretically. However, for various static and dynamic reasons the obtained coordinates are different. The degree of deviation of the obtained coordinates can represent the repeatability of the RAACMM. The single-point repeatability (spr) can be calculated by the equation (15)

Ten positions are selected to test the repeatability of the RAACMM before and after compensation with RBFNN. These positions are distributed in different directions in the measuring space of the RAACMM. Three hundred groups of coordinate data are obtained in each position, and spr is calculated by equation (15). The calculation results are shown in Figure 10, which shows that the maximum and average errors before compensation are 0.102 mm and 0.080 mm, respectively, and after compensation these ones are 0.079 mm and 0.068 mm, respectively. Therefore, after compensation, the maximum and average errors of the RAACMM are reduced by 22.5% and 14.5%. The maximum error is reduced greater than the average one, and Figure 10 also shows that after residual correction the distribution of repeatability error becomes smoother.

Comparison of single point repeatability before and after compensation.
Length accuracy test
Length accuracy is the other main accuracy index, which can be obtained by measuring high precision standard gauges. To get comprehensive results, standard gauges are put in several positions in the measurement space of the RAACMM, respectively. The RAACMM is used to measure the standard gauges and the measured results will be compared with the nominal length of the gauges.
In this article, two different length standard gauges of 300 mm and 500 mm with the accuracy of 0.0001 mm are used, as shown in Figure 11.

The standard gauges in the test: (a) 300 mm and (b) 500 mm.
To get comprehensive results, the standard gauges are put in 10 different positions in the measuring space of the RAACMM. The RAACMM is used to obtain the points of the two surfaces of the gauges, and the distance of the two surfaces will be the length of the gauges.
The measuring results of the 300-mm-length standard gauges in 10 positions are shown in Figure 12, which shows that before compensation the maximum and average errors of the RAACMM are 0.046 mm and 0.0373 mm, respectively. After compensation, the two errors are 0.023 mm and 0.0166 mm, which are decreased by 23.324% and 38.554%.

Comparison of 300-mm standard gauge measuring results before and after compensation.
Then, 500-mm-length standard gauges is taken to test the length accuracy before and after compensation. As shown in Figure 13, before compensation, the maximum and average errors are 0.045 mm and 0.0346 mm, respectively. After compensation these two errors are 0.022 mm and 0.0176 mm, which are decreased by 30.057% and 25.000%. As per the discussion in the introduction, the commonly used method to improve the accuracy of RAACMM, calibration, can only remove or compensate the static error factors (i.e. kinematic parameters). Moreover, the variety of dynamic error factors and difficulty of modeling, some of them restrict the effect of the polynomial fitting method. With neural networks, we do not need to model the various dynamic error factors. Therefore, the proposed residual correction method based on RBFNN can improve the accuracy of RAACMM significantly.

Comparison of 500-mm standard gauge measuring results before and after compensation.
Conclusions
To compensate errors due to dynamic factors of the RAACMM, the relationship between the probe’s coordinates residuals and poses of RAACMM has been studied in this article. Based on the analysis of the influence of the pose configuration on the residual error of the probe, the periodic characteristics of the residual error were obtained. And the model to describe relationship of the residual errors and structural parameters of the RAACMM was established. A residual correction method based on RBFNN with poses as the input and residual errors as the out was proposed. To obtain the training data, a cone-hole gauge is designed. After error compensation with the residual correction method, the maximum and average errors of the RAACMM’s repeatability are reduced by 22.5% and 14.5%, respectively. And the length measurement error of the RAACMM is reduced by 23.324% to 38.554%. These experimental results have shown the effectiveness of the proposed modeling and residual correction method.
Further works will be carried out to study the individual effect of the dynamic error factors of RAACMM and to model them respectively.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China [Grant No. 51865020].