
Abstract
Abstract An adaptive radial basis function (RBF) neural network control system for three-phase active power filter (APF) is proposed to eliminate harmonics. Compensation current is generated to track command current so as to eliminate the harmonic current of non-linear load and improve the quality of the power system. The asymptotical stability of the APF system can be guaranteed with the proposed adaptive neural network strategy. The parameters of the neural network can be adaptively updated to achieve the desired tracking task. The simulation results demonstrate good performance, for example showing small current tracking error, reduced total harmonic distortion (THD), improved accuracy and strong robustness in the presence of parameters variation and nonlinear load. It is shown that the adaptive RBF neural network control system for three-phase APF gives better control than hysteresis control.
1. Introduction
The harmonic current in electrical systems increases with nonlinear loads, which has degraded power quality. Active power filter (APF) is effective to deal with the harmonic current and power factor of the varying loads. At present, two traditional methods are mostly used in the current control for APF: hysteresis current control [1] and triangle wave current control [2]. However, fluctuating switching frequency, low control accuracy and slow response are the disadvantages of these two traditional methods. A number of solutions have been presented in the literature. Komucugil et al. [3] proposed a new control strategy for single-phase shunt APFs using a Lyapunov function. Rahmani et al. [4] introduced an experimental design of a nonlinear control technique for three-phase shunt APF. Shyu et al. [5] developed a model reference adaptive control design for a shunt APF system. Chang et al. [6] proposed novel reference compensation current strategy for shunt APF control. Matas et al. [7] showed a feedback linearization approach of a single-phase APF via sliding mode control. Hua et al. [8] gave control analysis of an APF using Lyapunov candidate. Montero et al. [9] compared different control strategies for shunt APF in three-phase four-wire systems. Valdez et al. [10] designed an adaptive controller for shunt active filter in the presence of a dynamic load and the line impedance. Marconi et al. [11] developed a robust nonlinear controller to compensate harmonic current for shunt active filters.
Neural network has learning ability to approximate any nonlinear function over the compact input space. By properly choosing neural network structures and training the weights, researchers may use neural networks for special tasks. In order to search the optimal weights for neural networks, a number of algorithms have been developed. The gradient-based training algorithms are probably the most popular. Man et al. [12] presented an adaptive back-propagation (BP) neural network controller for power filter. Seng et al. [13] derived adaptive RBF neural network training algorithm for nonlinear signal. Lin et al. [14] used neural network based robust nonlinear control for a magnetic levitation system. Lee et al. [15] developed an adaptive RBF neural network controller for robot manipulators. Neural network can be employed to control the active power filters. Dai et al. [16] designed an adaptive neural network controller to compensate reactive power and reduce the unwanted harmonics of shunt APF. Masjedi et al. [17] proposed an adaptive learning algorithm for RBF neural network to control shunt APF. Neural network controllers with application to APF have been investigated in [18–20]. Fei et al. [21] proposed an adaptive fuzzy controller design with supervisory controller for three-phase active power filter.
However, neither systematic analysis nor controller design for APF utilizing RBF neural network based on Lyapunov stability theory, have been discussed in the literature. In this paper, an adaptive neural controller is utilized to improve the current tracking and filtering performance. An adaptive control method based on RBF neural network is proposed to overcome the shortcomings of traditional methods, improve the current tracking performance and guarantee the Lyapunov stability of the closed-loop system. This method features high control accuracy, real-time operation, and a wide range of applications, and can reduce current total harmonic distortion effectively. More specifically, the proposed control strategy has the following advantages:
It combines adaptive control, sliding mode control and RBF neural control. An adaptive neural network controller is used to compensate the system nonlinearities and improve the tracking performance. An RBF neural network controller which can be trained online is incorporated into the adaptive control scheme in the Lyapunov framework to guarantee the stability of the closed loop system. An accurate mathematical model with the proposed adaptive neural controller is unnecessary since RBF neural network has the ability to approximate the nonlinear characteristics of APF. Adaptive neural control is proposed to deal with system nonlinearities and nonlinear load in order to improve the current tracking and the robustness for parameters variations and nonlinear loads compared with conventional control methods. Adaptive neural control has a great ability to compensate for the system nonlinearities and improve the power dynamic performance such as current tracking and THD performance. The robust adaptive neural control method has been extended to the control of APF. This is a successful application example using adaptive control, neural network control, with application to the APF.
2. Basic Principles of Active Power Filter
The basic structure of the three-phase three-wire shunt APF is shown in Fig. 1, where vsavsbvsc are voltages of the three-phase power system, r is the resistance from the power source to inductance on the AC side of APF, L is the inductance on the AC side of APF, vdc is the capacitor voltage on the DC side, is is line current, iL is non-linear load current, ic is compensation current, and i*c is command current as the basis of compensation current.

Basic structure of shunt APF
The circuit system of APF can be divided into two parts. The first part is the command current operating circuit used to detect the harmonic and reactive components of load current, which is defined as command current i*c. This part is usually realized with the harmonic current detecting method based on instantaneous reactive theory. The second part is the compensation current generating circuit made up of three parts: following control circuit, driving circuit and main circuit. This part is used to generate compensation current ic on the basis of command current i*c from the first part; the compensation current generating circuit enlarges the command current and generates the compensation current. Then, the compensation current is injected into the line to compensate the harmonic and reactive components of the load current, and the line current is forced to become sine wave.
Based on the circuit theory and Kirchhoff's current law, we can obtain the following expressions:

where σ is the switching function to indicate the working state of IGBT. We define

3. Design of Adaptive RBF Neural Network Controller
In this section, an adaptive RBF neural network controller will be designed and the weights of the RBF neural network controller will be updated according to the error between command current and compensation current based on Lyapunov stability analysis.
3.1 RBF Neural Network
RBF network is an artificial neural network that uses radial basis functions as activation functions. The output of the network is a linear combination of radial basis functions of the inputs and neuron parameters. RBF networks are used for function approximation and system control. The basic architecture of an RBF is a three-layer network, comprising input layer, hidden layer and output layer. The variation from input layer to hidden layer is nonlinear, while the variation from hidden layer to output layer is linear. The output layer performs a simple weighted sum with a linear output. RBF neural network is a kind of local approximate neural network which can approximate any continuous function if there are enough neurons. Therefore, RBF neural network can accelerate learning speed and avoid the local minimum problem, making it suitable for the real-time control requirement of APF.
The output of the RBF neural network controller can be expressed as:

where m is the number of hidden-layer neurons, θj is the weight between hidden layer and output layer, hj is the output of hidden layer.
In RBF neural network,

where bj is the base width of node j,
In this paper, parameters of the proposed RBF neural network are chosen as follows:

3.2 Design of RBF Neural Controller
The block diagram of adaptive RBF neural network is shown in Fig. 2. We use the tracking error between compensation current ic and command current i*c as the input of controller, and PWM signal is generated by the controller to control the switches of the main circuit. Thus, compensation current is employed to eliminate the harmonic current. The detailed design process can be described as follows:
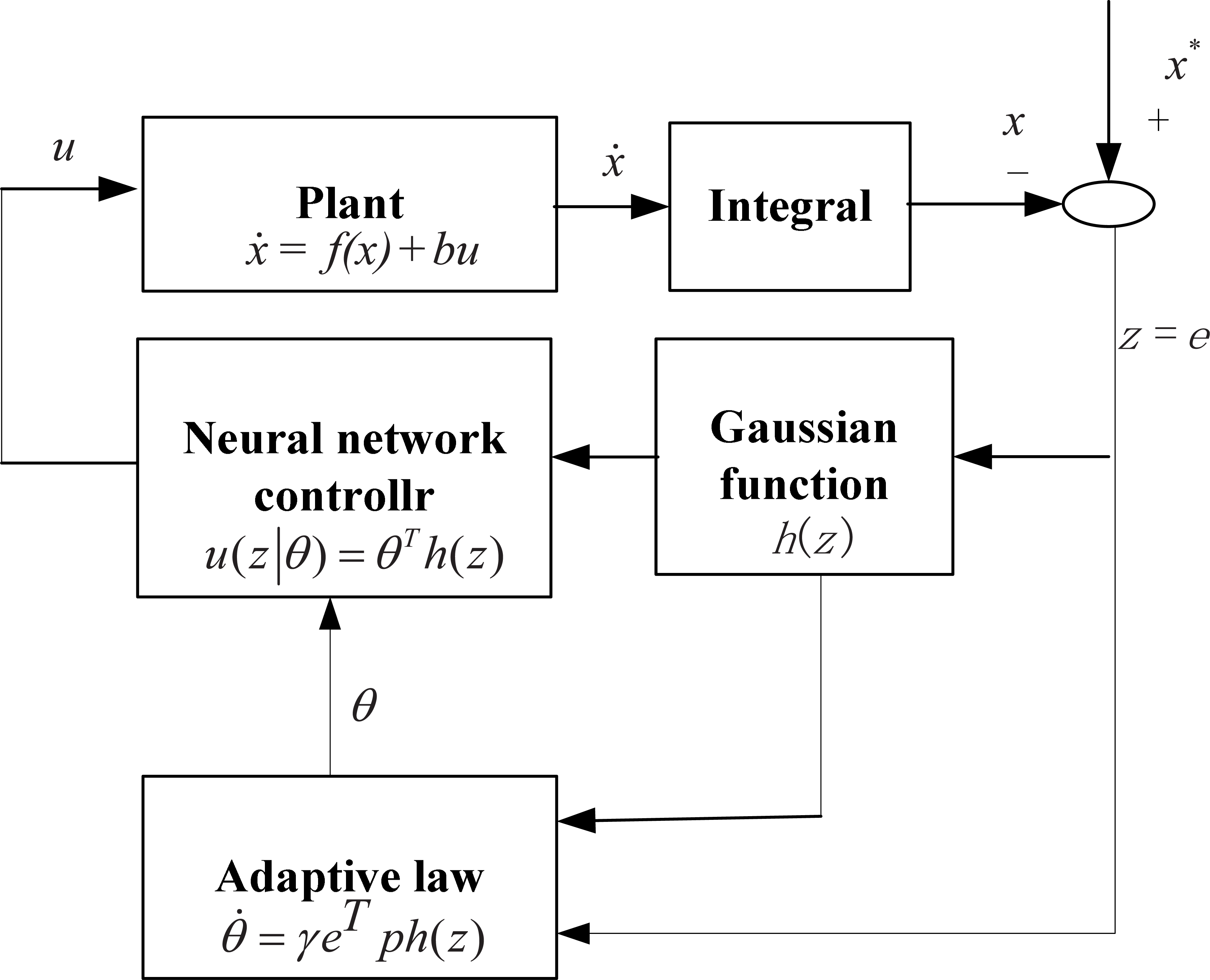
Block diagram of adaptive RBF neural network control system
The mathematical model of APF (2) can be written as:

The control objective is to make x track x*, and the tracking error is e = x*-x;
The derivative of tracking error can be expressed as:

where

where sup represents the upper bound of the error.
The least tracking error of RBF neural network is defined as

Substituting (8) into (6) yields

Define the Lyapunov function candidate

where γ is a positive constant, p is the positive constant to satisfy

where q is a positive constant.
Differentiating V with respect to time yields:

The adaptive law is chosen as

where γ is the adaptive gain.
Substituting (12) into (11) yields
Since q,p,b>0, from the universal approximation theorem ε can be made arbitrarily small using fuzzy system on a compact domain, that is, ε can be equal to zero. ε is the least tracking error, and can be designed to be sufficiently small that we have
4. Simulation Study
The performance of the proposed adaptive RBF neural network control is investigated using the Matlab/Simulink package with SimPower Toolbox. Simulation results are presented to verify the effectiveness of the proposed neural control.
The parameters of the RBF neural network are chosen as follows:
Input node n = 3, hidden layer node m=27, output node is 3, learning rate γ = 80, centric vector cj =[−13, −12… −1,0,1…12,13]T, base width
The parameters of APF are selected as follows:
PI controller is used to control the DC side voltage, k = 0.08, ki = 0, inductance on the AC side L = 5mH capacitors voltage on the DC side vdc =100uF. Nonlinear load branch is a rectifier bridge connecting parallel RC load, where R = 15Ω, C = 5e – 3F.
Fig. 3 describes the wave graph of A phase current before and after controlling the APF. As can be seen from Figs. 4–5, before 0.04 s the A phase current contains substantial harmonic, and the total harmonic distortion (THD) is 24.71%. After 0.04 s, APF begins to take action: it can be observed that the current wave is close to a sine wave before 0.01 s. Then it can be concluded that APF can compensate the harmonic current effectively with the proposed adaptive neural controller. Fig. 6 describes the graph of the compensation current tracking the command current. As we can see, compensation current can track the command current very well before 0.045 s. Therefore, harmonic current is eliminated, the line current is forced to approximate to a sine wave and THD is largely reduced, correspondingly. Fig. 7 is the dynamic curve of voltage on the DC side; the PI controller can make it track the reference voltage quickly, and maintain a relatively stable state.

A phase current
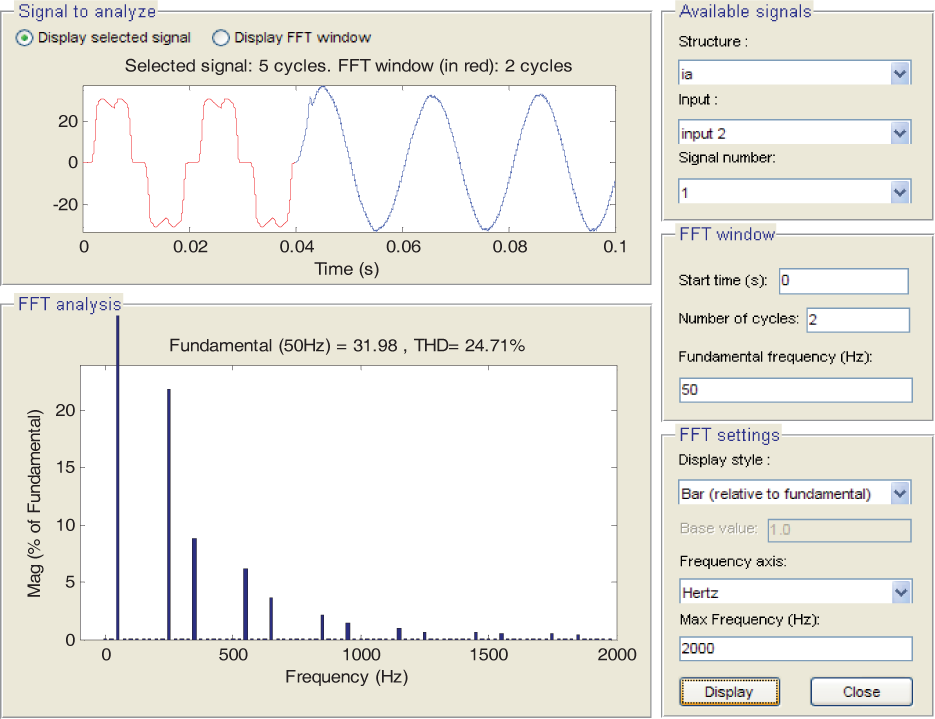
Current harmonic analysis for the first two circles

Current harmonic analysis for the last two circles

Command current and compensation current

Voltage wave of the DC side
In practical application some physical parameters of APF may be changed. In order to demonstrate that the adaptive neural network control system has strong robustness in the presence of parameters variation, we investigate the APF with the parameters variation as shown from Table 1. We can see that THD is still in the acceptable range. It can be concluded that the adaptive neural control system has good robustness in the presence of parameter variations.
Performance for variation in filter inductance and DC capacitor

In order to demonstrate that the adaptive neural control system has achieved better than the conventional method, we also testify the APF with the hysteresis control. It can be observed from Fig. 8 that the THD is 2.1% using hysteresis control, which is higher than the 1.81% using adaptive neural control; the big distortion occurs from 0.04 to 0.05 s, which is worse than that using adaptive neural network control.

Current harmonic analysis for the last two circles using hysteresis control
5. Conclusion
In this paper, an adaptive neural network control method towards three-phase active power filter is presented to make compensation current compensate harmonic current, and improve the quality of the power system. The parameters of the neural control system can be adaptively updated based on the Lyapunov analysis. The asymptotical stability of the closed-loop system can be guaranteed with the proposed strategy. Simulation results prove that this control method can reduce total harmonic distortion effectively, and that the adaptive neural network controller has better harmonic elimination performance compared to traditional methods.
6. Acknowledgments
This work is supported by National Science Foundation of China under grant no. 61074056, the Fundamental Research Funds for the Central Universities under grant no. 2012B06714, and the Scientific Research Foundation of High-Level Innovation and Entrepreneurship Plan of Jiangsu Province.