
Abstract
In this article, a novel robust tracking control scheme based on linear extended state observer with estimation error compensation is proposed for the tracking control of the antagonistic variable stiffness actuator based on equivalent nonlinear torsion spring and the serial variable stiffness actuator based on lever mechanism. For the dynamic models of these two classes of variable stiffness actuators, considering the parametric uncertainties, the unknown friction torques acting on the driving units, the unknown external disturbances acting on the output links and the input saturation constraints, an integral chain pseudo-linear system with input saturation constraints and matched lumped disturbances is established by coordinate transformation. Subsequently, the matched lumped disturbances in the pseudo-linear system are extended to the new system states, and we obtain an extended integral chain pseudo-linear system. Then, we design the linear extended state observer to estimate the unknown states of the extended pseudo-linear system. Considering the input saturation constraints in the extended pseudo-linear system and the estimation errors of the linear extended state observer with fixed preset observation gains, the adaptive input saturation compensation laws and the novel estimation error compensators are designed. Finally, a robust tracking controller based on linear extended state observer, sliding mode control, adaptive input saturation compensation laws, and estimating error compensators is designed to achieve simultaneous position and stiffness tracking control of these two classes of variable stiffness actuators. Under the action of the designed controller, the semi-global uniformly ultimately bounded stability of the closed-loop system is proved by the stability analysis of the candidate Lyapunov function. The simulation results show the effectiveness, robustness, and adaptability of the designed controller in the tracking control of these two classes of variable stiffness actuators. Furthermore, the simulation comparisons show the effectiveness of the proposed estimation error compensation measures in reducing the tracking errors and improving the disturbance rejection performance of the controller.
Keywords
Introduction
The variable stiffness actuator (VSA) has such characteristic that the output link position and the joint output stiffness are independently controllable. 1 The inherent flexibility and joint stiffness adjustability make the VSA suitable for bionic robot arms, rehabilitation training equipments, 2,3 lower-limb exoskeletons, 4 and robotic-assisted walking devices. 5 The tracking control of the output link position and the joint output stiffness are two basic control objectives of the VSA. Good output link position and joint output stiffness tracking control will help to improve the actuation performance of the VSA. Therefore, the tracking control of the position and stiffness of the VSA has important research significance.
In order to realize tracking control of the VSAs, many control strategies have been investigated over several years. The proportional derivative (PD) controllers are used for tracking control of the position and stiffness of the VSA-II, 6 the actuator with adjustable stiffness (AwAS), 7 the AwAS-II 8 and the Compact-VSA. 9 The simultaneous and independent control of the output link position and joint output stiffness of the variable stiffness actuator-2 designed by University of Twente (vsaUT-II) 10 is realized by using two proportional integral differential (PID) controllers. The PD feedback plus feedforward controllers are used for both position and stiffness regulation of the serial variable stiffness actuator (SVSA) 11 and the SVSA-II. 12 A gain scheduling controller based on a set of linear quadratic regulators is designed to regulate both stiffness and position of the VSAs in series configurations using lever mechanisms. 13 A command filtered backstepping approach is designed for the tracking control of the multi-degree-of-freedom (DOF) variable stiffness robots. 14 The feedback linearization approach is designed to achieve tracking control of the desired position and stiffness of the antagonistic VSA and the SVSA. 15 –17 The feedback linearization controller with integral terms 18 and the sliding mode controller with integral terms 19 are designed for the tracking control of the position and stiffness of the VSAs, and the integral control is used to eliminate the tracking errors caused by model uncertainties and disturbances. A robust control method combining adaptive control and mapping filtered forwarding technique is developed for tracking control of the output link position of the antagonistic tendon-driven joint. 20 An adaptive neural network control approach combining disturbance observer (DOB) is proposed for tracking control of the output link position of the robotic systems based on variable stiffness joints. 21 A low-complexity state feedback controller with prescribed performance of the tracking errors and increased robustness to external perturbation is developed for the tracking control of the output link position of the multi-DOF variable stiffness actuated robots. 22 The adaptive robust tracking controller based on feedback linearization and radial basis function neural network (RBFNN) is proposed for simultaneous position and stiffness tracking control of the SVSAs based on lever mechanisms. 23
In the above studies, many control strategies do not take specific measures to ensure the robustness of the tracking control of the VSAs. 6 –9,11 –17 The control methods using integral terms to eliminate tracking errors of the VSAs may have undesirable transient tracking performances. 10,18,19 The control schemes designed by Zhang et al. 21 and Psomopoulou et al. 22 are mainly aimed at the tracking control of the output link position of the multi-DOF robot based on the variable stiffness joints, not at the simultaneous position and stiffness tracking control of the single VSA. The robust tracking controller designed by Lu et al. 20 is used to realize tracking control of the output link position of the antagonistic tendon-driven joint, and this controller is not suitable for simultaneous position and stiffness tracking control of the VSA. The RBFNN is used to ensure the robustness of the controller 23 but the control input saturation problem is not considered in the design of the controller. As mentioned above, the current studies on the robust tracking control of the position and stiffness of the VSAs are not sufficient. Therefore, in order to improve the actuation performance of the VSAs, it is necessary to further study the robust tracking control method for the VSAs.
In the current studies on robust tracking control, DOB 24 –28 and extended state observer (ESO) are two popular methods to effectively deal with the uncertainties and the disturbances in the systems. Generally, the ESOs can be classified into the linear extended state observers (LESOs) and the nonlinear extended state observers (NESOs). The gain parameters of the NESOs are usually difficult to set, especially for the high-order systems. Compared with the NESO, the LESO has the advantage of convenient gain parameter setting, and the control schemes based on the LESO have been applied to various systems. 29 –39 For the antagonistic VSAs based on equivalent nonlinear torsion springs (ENTSs) in the presence of parametric uncertainties, unknown friction torques, unknown external disturbance, and input saturation constraints, a combination of the LESO, the sliding mode control (SMC), and the adaptive input saturation compensation (ISC) is designed to achieve the simultaneous position and stiffness tracking control of the VSAs. 40 However, in the above studies, 21,26 –40 the estimation errors were not considered explicitly in the DOB-based control or the LESO-based control.
Similar to the gain settings of the LESO in many other types of control systems, 29 –40 the LESO with fixed preset observation gains is used in the tracking control of the antagonistic VSA based on ENTS. 40 However, the LESO with fixed preset observation gains always has estimation errors, especially when the reference trajectories change abruptly (i.e. the tracking errors are large), or the time-varying disturbances are imposed on the system, or the disturbances in the system are large, or the disturbances imposed on the system suddenly change. Increasing the gains of the LESO is beneficial to reducing the estimation errors, but the gains of the LESO should not be set too large. Excessive LESO gains may amplify the influence of measurement noises on tracking performance, or may lead to instability of the system. Considering that the estimation errors of the LESO with fixed preset observation gains will inevitably have a negative impact on the tracking accuracy of the VSA, and in order to improve the robustness of the tracking control, it is necessary to design the estimation error compensation (EEC) measures to reduce the tracking errors of the system outputs (i.e. position and stiffness) and improve the disturbance rejection performance of the controller.
Among many kinds of VSAs, the antagonistic VSAs based on ENTS and the SVSAs based on lever mechanisms are two classes of widely studied VSAs. In this article, in order to demonstrate the adaptability of the designed controller, the system models of these two classes of VSAs are studied as examples. To the best of our knowledge, this is the first study to design a robust tracking controller based on LESO with EEC for the antagonistic VSA based ENTS and the SVSA based on lever mechanism. The main contributions of this article are stated as follows. The novel estimation error compensators are developed to estimate the estimation errors of the traditional LESO with fixed preset observation gains. The proposed estimation error compensators are inspired by the stable single input single output (SISO) DOB. Each estimating error compensator has the characteristic of simple parameter adjustment, and the performance of each estimation error compensator can be tuned easily by only one parameter. The estimated values provided by the estimation error compensators are introduced into the controller to reduce the system output tracking errors. The design of the estimation error compensator reflects the flexibility and expansibility of the application of SISO DOB. As far as our knowledge goes, this is the first study to design robust tracking controller by skillfully combining the SISO DOB and the LESO. By combining the SISO DOB with the LESO, the tracking accuracy and disturbance rejection performance of the controller are improved. A novel robust tracking control approach based on LESO with EEC is proposed for the tracking control of these two classes of VSAs (i.e. the antagonistic VSA based on ENTS and the SVSA based on lever mechanism) in the presence of parametric uncertainties, unknown friction torques, unknown external disturbances, and control input saturation. Furthermore, the semi-global ultimate uniformly bounded stability of the closed-loop systems is proved based on the stability analysis of the candidate Lyapunov function, and the tuning rules of the controller parameters are discussed. Finally, the simulation results show the effectiveness, robustness, and good adaptability of the designed controller. The proposed design idea of reducing the tracking error can be extended to the tracking control of other types of systems
26
–40
to improve the tracking accuracy and disturbance rejection performance of the controller.
This article is organized as follows. The system models of these two classes of VSAs (i.e. the antagonistic VSA based on ENTS and the SVSA based on lever mechanism) are described in the second section. The coordinate transformation and the LESO design for these two classes of VSAs are presented in the third section. The novel robust tracking controller based on the LESO with EEC is designed in the fourth section. The simulation studies are carried out in the fifth section. Finally, conclusions are drawn in the sixth section.
System models of these two classes of VSAs
In this section, the dynamic models of the antagonistic VSAs based on ENTSs and the SVSAs based on lever mechanisms are shown. Although the stiffness characteristics of the ENTSs of the antagonistic VSAs may be different, the antagonistic VSAs based on the ENTSs have the same structural form of the dynamic model. 6,15,16,20 In this article, in order to select representative antagonistic VSA without losing generality, the dynamic model of antagonistic VSA based on equivalent exponential torsion spring (EETS) 15,20,40 is selected as an example.
For the SVSAs based on lever mechanisms, although the existing VSAs of this class have different mechanical implementation schemes of variable stiffness mechanisms, all of these VSAs have the same transmission scheme design with series configuration, and these VSAs have the same structural form of the dynamic model. 7 –9,11 –13,16,23 As a representative device in the class of the SVSAs based on lever mechanisms, the highly integrated Compact-VSA 9 is chosen as the study object. It should be noted that although the dynamic models of the antagonistic VSA based on EETS (EETS-based VSA) and the Compact-VSA 9 are taken as examples in the controller design, the proposed controller will be applicable to other antagonistic VSAs based on ENTS and the SVSAs based on lever mechanisms.
System dynamic model of the antagonistic VSAs based on ENTS
The nominal dynamic model of the antagonistic VSA based on ENTS 6,15 –17,20 can be written as
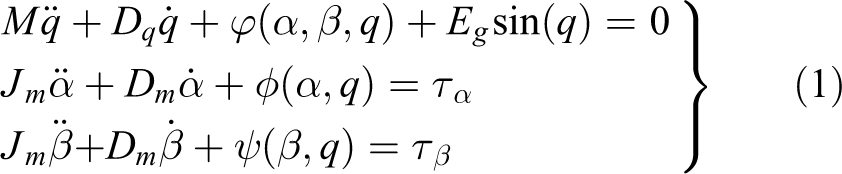
where the M is the inertia constant of the output link of the joint, Jm
is the inertia of the elastic actuation unit, Dq
is the damping coefficient of the output link, Dm
is the damping coefficient of the elastic actuation unit,
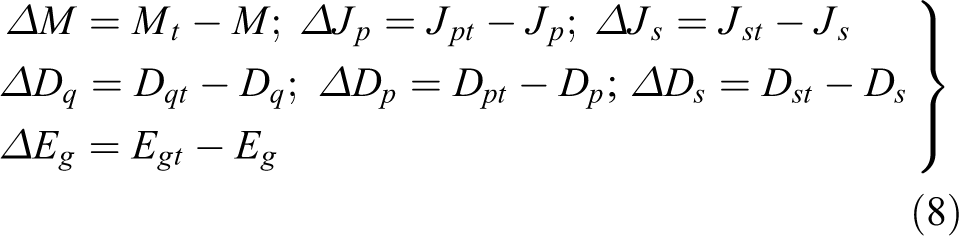
Considering the uncertainties of the system dynamic model parameters, the unknown friction torques (i.e.

where the actual model parameters (i.e. Mt
,

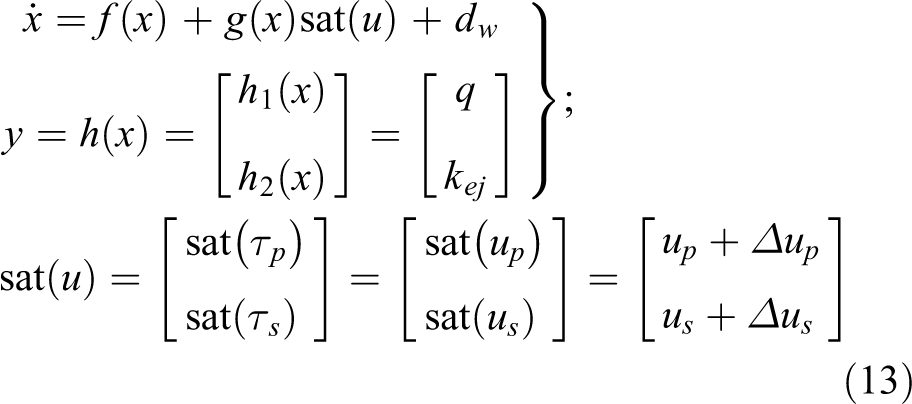
The control input saturation models are described in equation (4). The actual control input of the dynamic model of the antagonistic VSA based on ENTS is

The antagonistic EETS-based VSA is a representative device in the class of antagonistic VSA. In this article, the tracking control of the EETS-based VSA is used to show the tracking performance of the designed controller. As presented in Guo and Tian,
40
the elastic actuating torques (i.e. ϕ(α, q) and

where
System dynamic model of the SVSAs based on lever mechanisms
The VSA with series configuration based on lever mechanism consists of a primary motor, used to adjust the angular position of the output link of the joint through the equivalent elastic transmission unit, and of a secondary motor, used to regulate the equivalent stiffness of elastic transmission unit by the equivalent lever mechanism. The nominal dynamic model of the SVSA based on lever mechanism 7 –9,11 –13,16,23 is given by

where M, Jp
, and Js
are the equivalent inertia moments of the system; Dq
, Dp
, and Ds
are the viscous friction coefficients;
Considering the parametric uncertainties, the unknown external disturbance (i.e.

where Mt
,
The Compact-VSA
9
is a representative device in the class of the SVSAs based on lever mechanisms, and the tracking control of the Compact-VSA is used to show the tracking performance of the designed controller. For the Compact-VSA system, the elastic torque

where
State space equation of the antagonistic VSA based on ENTS
For the dynamic model of the antagonistic VSA based on ENTS shown in equation (2), let the system be

where
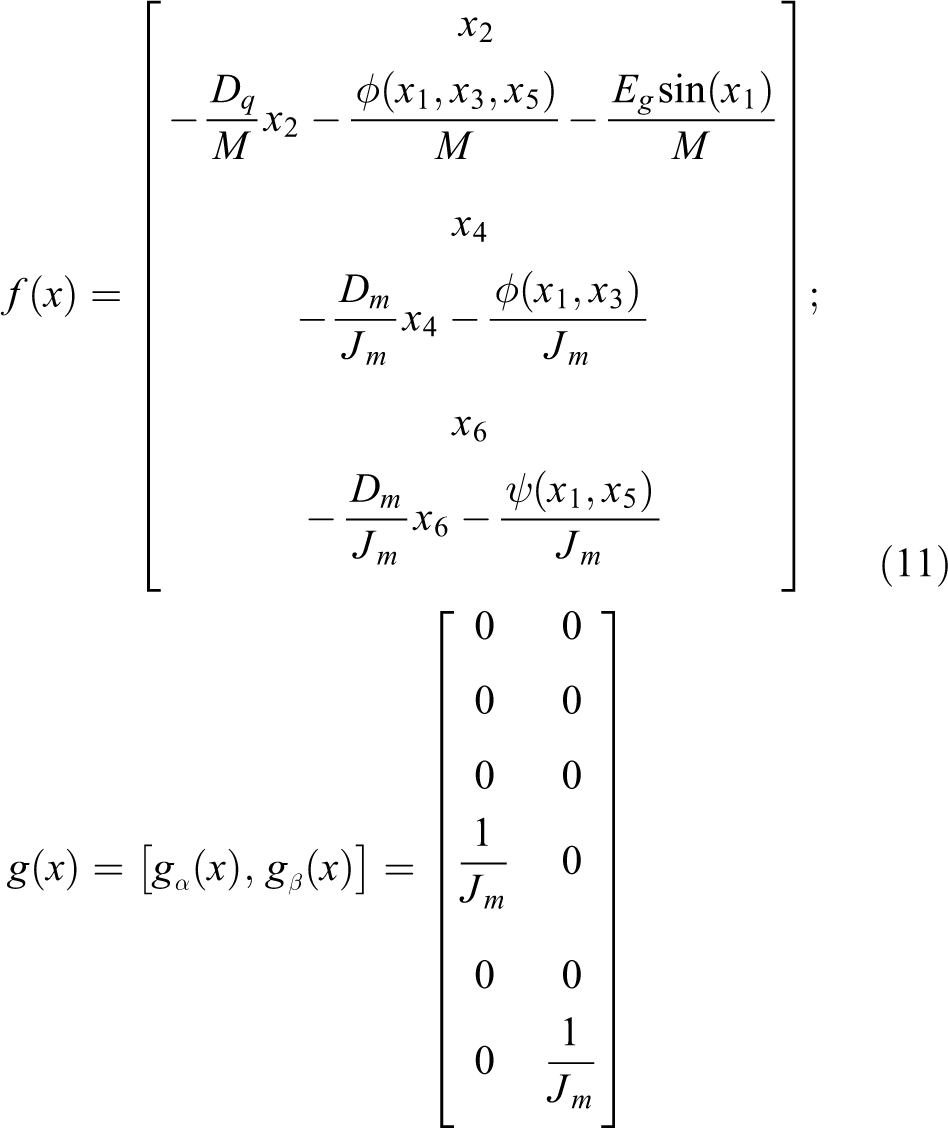
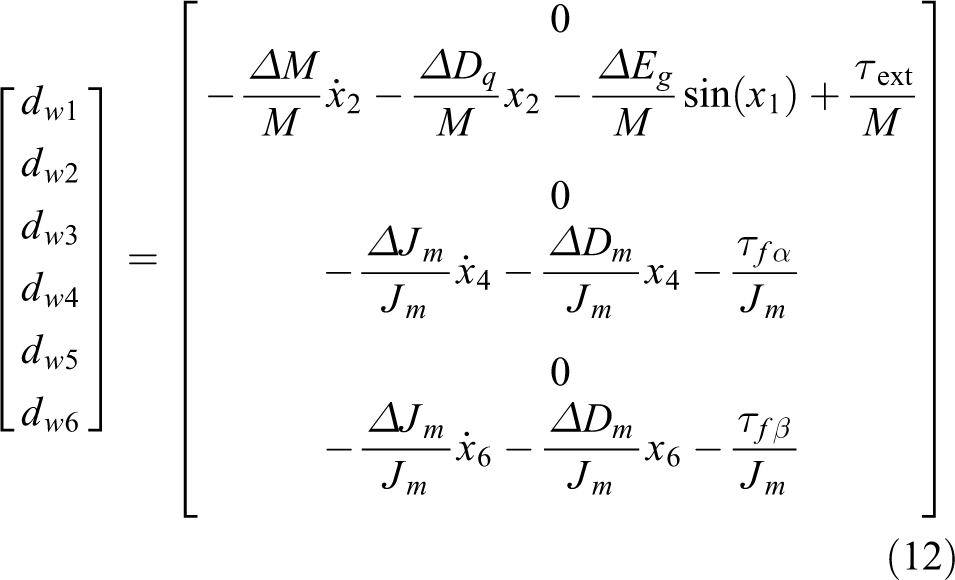
The composite disturbance vector
State space equation of the SVSA based on lever mechanism
Invoking the actual dynamic model of the SVSA based on lever mechanism shown in equation (7) and let the system be
where

Coordinate transformation and LESO design for these two classes of VSAs
In this section, by using the coordinate transformation, the state space models with composite disturbances and input saturation constraints shown in equations (10) and (13) can be transformed into an integral chain pseudo-linear system with matched lumped disturbances and input saturation constraints. Subsequently, an extended integral chain pseudo-linear system is obtained by treating the matched lumped disturbances as the new system states, and the LESO is designed to estimate the unknown system states of the extended integral chain pseudo-linear system.
Although the antagonistic VSAs based on ENTSs and the SVSAs based on lever mechanisms have different variable stiffness principles and variable stiffness mechanisms, these two classes of VSAs have the same structural forms of the state space models. Therefore, the designed LESO will be applicable to these two classes of VSAs.
Coordinate transformation and system model transformation
By using the coordinate transformation shown in equation (15), equations (10) and (13) can be transformed into a pseudo-linear system, as shown in equation (16). The matched lumped disturbance vector



For the antagonistic VSA based on ENTS, the new saturation control input

where

For the SVSA based on lever mechanism, the saturation control input


By defining the matched lumped disturbances as the new system states (i.e.

where
LESO design
For the extended integral chain pseudo-linear system expressed in equation (22), the LESO is designed as
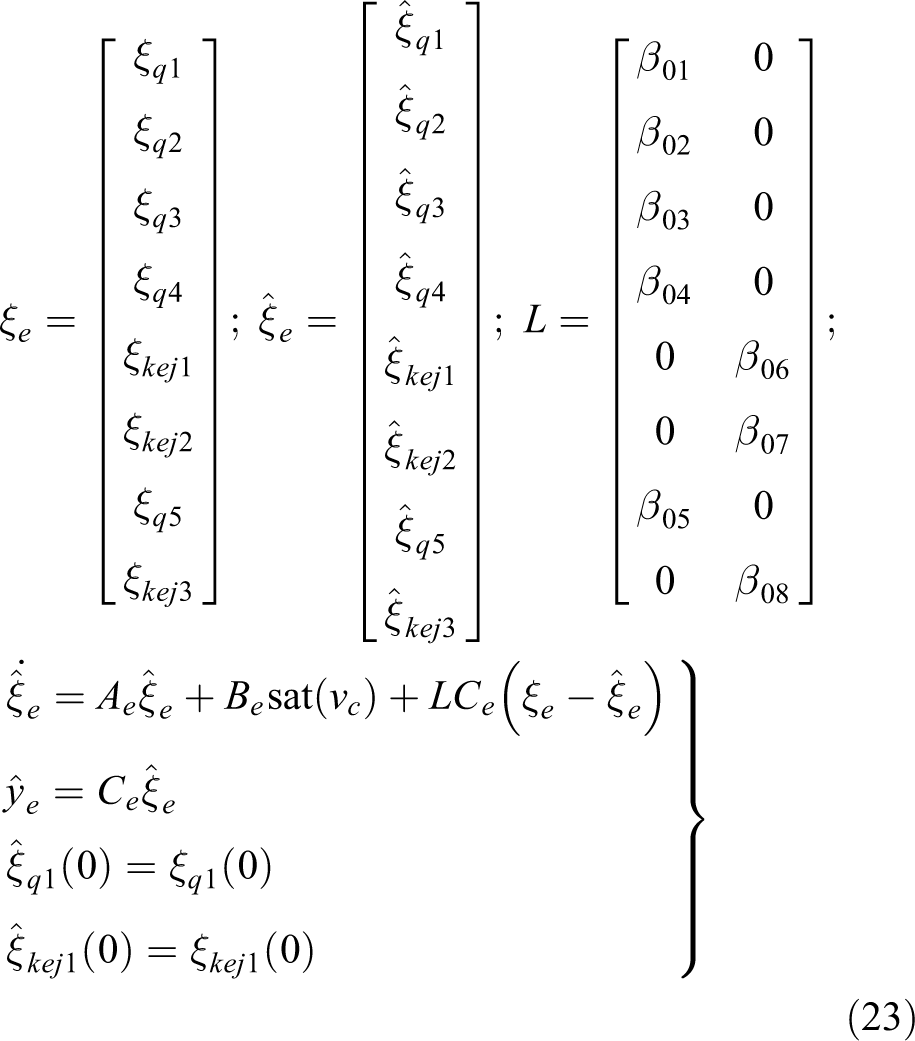
where the
The characteristic equations of the LESO are given by

where the gain parameters of the LESO have to be designed such that the equations shown in (24) are Hurwitz.
LESO + SMC + ISC + EEC controller design and analysis
In this section, a combination of the LESO, SMC,
41
–43
ISC, and EEC (i.e. LESO + SMC + ISC + EEC controller) is proposed such that the position q and the joint stiffness
For the purpose of the stability analysis, the assumptions and the lemma are presented as follows.
Assumption 1
The reference trajectories and the derivatives of the reference trajectories are all bounded.
Assumption 2
For the input–output differences shown in equation (16) (i.e. Δvcq
and Δvckej
), there exist unknown bounded positive constants
Lemma 1
The inequality
Algorithm
This section describes in detail the newly proposed tracking control scheme based on LESO with EEC for achieving simultaneous position and stiffness tracking control of the VSAs.

The tracking errors of the output link position and the joint output stiffness of the VSA are represented as

where qd
is the desired differentiable position trajectory,
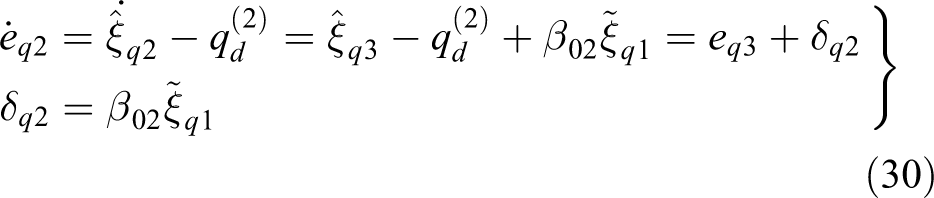
Invoking the extended integral chain pseudo-linear system (22), the LESO (23), the state estimation errors (25), and the tracking errors (26), the first-order time derivative of the estimated system states can be expressed as

The first-order time derivative of

The state estimation error compensator shown in equation (29) is used to estimate the state estimation error

The state estimation error compensator shown in equation (31) is used to estimate the unknown state estimation error


The state estimation error compensator shown in equation (33) is used to estimate the unknown state estimation error


The state estimation error compensator shown in equation (35) is used to estimate the state estimation error


where

The state estimation error compensator shown in equation (38) is used to estimate the state estimation error


where

The state estimation error compensator (41) is used to estimate the unknown state estimation error


The state estimation error compensator (43) is used to estimate the unknown state estimation error
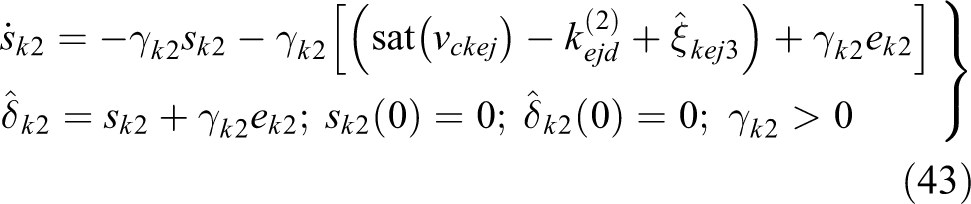

where
The state estimation error compensator for estimating


where
Discussion of boundedness of the closed-loop system under the designed controller
In this section, the stability of the closed-loop system under the proposed controller is analyzed. Invoking equations (28) to (46) and Lemma 1, the related calculations shown in equations (47) to (56) can be obtained










Let the candidate Lyapunov function

Then, based on equations (47) to (57), the first-order time derivative of the candidate Lyapunov function


The controller parameters are set as shown in equation (60)

Assuming that V(0) ≤ p, by choosing the parameter

For the antagonistic VSA based on ENTS, the control input is represented as

For the SVSA based on lever mechanism, the control input is represented as

The schematic diagram of the proposed LESO + SMC + ISC + EEC controller is shown in Figure 1.
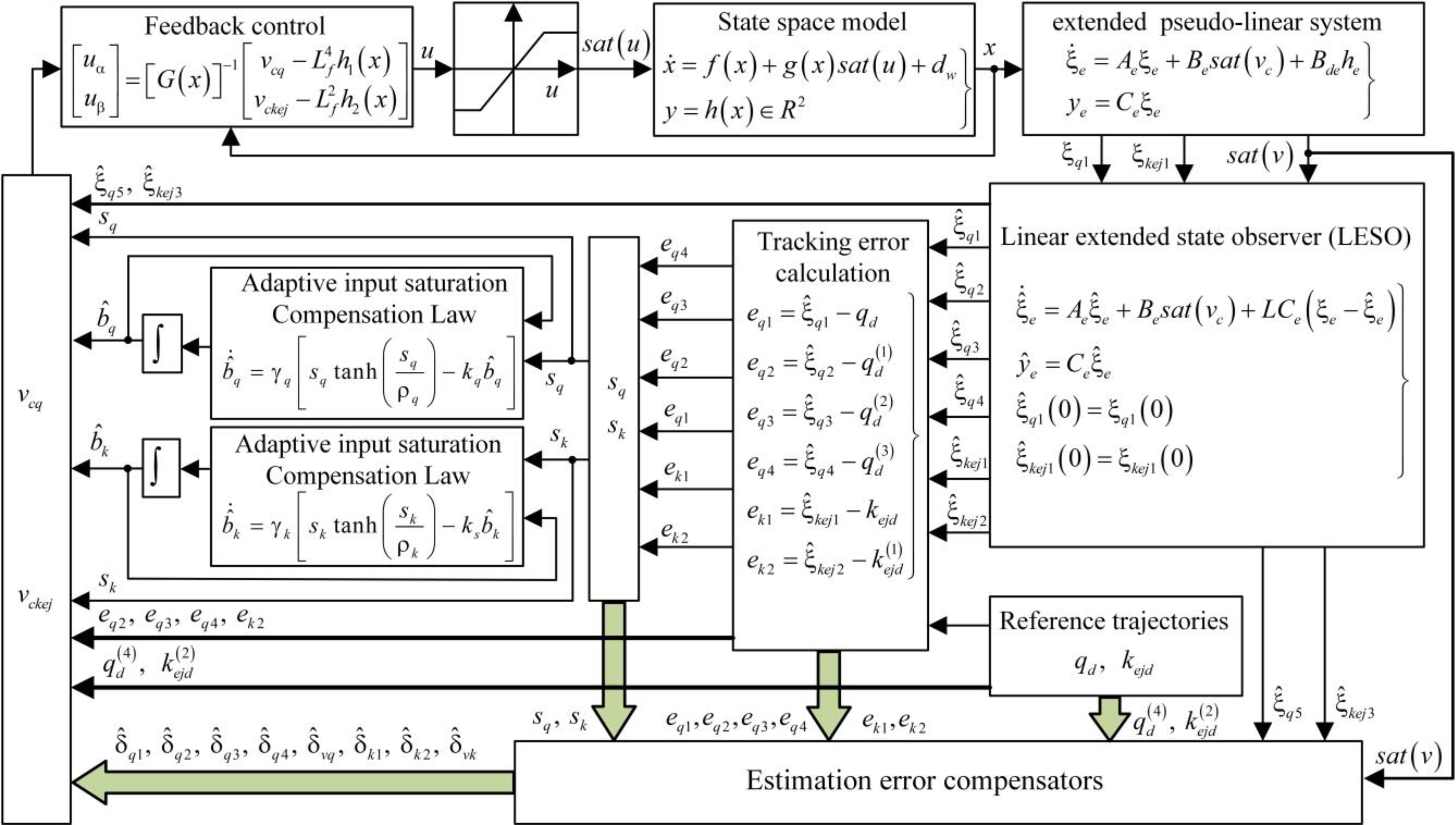
The schematic diagram of the proposed LESO + SMC + ISC + EEC controller. LESO: linear extended state observer; SMC: sliding mode control; ISC: input saturation compensation; EEC: estimation error compensation.
Remark 1
The proposed estimating error compensators are shown in equations (29), (31), (33), (35), (38), (41), (43), and (45), respectively. It is necessary to point out that the estimation error compensator designed in this article has the same structural form as the stable SISO DOB, 24 –28 but its control input setting is different from that of the traditional SISO DOB. The purpose of the definition and setting of the control input of the estimation error compensator is to obtain the estimation value of the estimation error of the LESO. Based on the stability analysis of the candidate Lyapunov function, the semi-global ultimate uniformly bounded stability of the closed-loop control system with EEC is proved. To the best of our knowledge, this is the first study to compensate the estimation errors of the traditional LESO with fixed observation gains by using the SISO DOB.
Remark 2
The estimated errors

Remark 3
As shown in equation (61), the convergence rate of the tracking errors is mainly determined by the parameter rF
. Since rF
is related to parameters
Remark 4
As shown in equations (62) and (63), in order to obtain the control input


Remark 5
The LESO + SMC + ISC + EEC controller designed in this article is shown in equations (39) and (46). In order to demonstrate the effectiveness of the proposed EEC measures in reducing the system output tracking errors, the LESO + SMC + ISC controller shown in equation (67) is used to compare with the LESO + SMC + ISC + EEC controller. In order to further demonstrate the compensation effect of the proposed EEC measures and reduce the complexity of the controller, the LESO + SMC controller shown in equation (68) and the LESO + SMC + EEC controller shown in equation (69) are used for comparison in simulation. Note that the calculations of the actual control inputs corresponding to these three controllers can refer to equations (62) and (63)



Simulation and analysis of the effect of EEC on tracking control
In this section, the performance of the proposed controller based on LESO with EEC is demonstrated by MATLAB simulation. The controlled system dynamic models are provided by equations (10) and (13), respectively. The purpose of simulation studies is to show that the designed controller can achieve simultaneous position and stiffness robust tracking control of these two classes of VSAs. Furthermore, the purpose of simulation comparison is to verify and demonstrate that the proposed novel EEC measures can effectively improve the tracking accuracy and disturbance rejection performance of the controller. In addition, sufficient simulation comparisons show that the proposed robust tracking controller based on LESO with EEC measures has good adaptability in the simultaneous position and stiffness tracking control applications of these two different classes of VSAs.
For the antagonistic EETS-based VSA and the serial Compact-VSA based on lever mechanism, accurate system dynamic models are difficult to obtain, and the uncertainties of model parameters are unavoidable. Considering the inaccuracy of dynamic model parameters (i.e. the unknown parameter perturbations), the unknown friction torques, and the unknown external disturbance, the predefined system disturbances shown in Tables 1 and 2 are used to demonstrate the effectiveness and robustness of the designed controller. It should be noted that in order to demonstrate the robustness of the controller, the predefined disturbances shown in Tables 1 and 2 are set to be different in four different time periods.
Definitions of the composite disturbances imposed on the EETS-based VSA system.

EETS: equivalent exponential torsion spring; VSA: variable stiffness actuator.
Definitions of the composite disturbances imposed on the Compact-VSA system.

VSA: variable stiffness actuator.
Simulation and analysis of the effect of EEC on tracking control of the antagonistic VSA based on EETS corresponding to comparison settings 1
In this simulation, the purpose of simulation comparison is to show the effect of the proposed novel EEC measures on tracking performance of the EETS-based VSA. In order to reduce the complexity of the controller, two kinds of controllers without ISC, namely, LESO + SMC controller shown in equation (68) and LESO + SMC + EEC controller shown in equation (69), are used for simulation comparison. Compared with the LESO + SMC + EEC controller, the LESO + SMC controller only lacks the EEC term.
In the simulation, the initial system states of the EETS-based VSA and the initial states of the LESO are defined as
The main simulation results under the designed LESO + SMC controller and the LESO + SMC + EEC controller are depicted in Figure 2. It can be observed that the angular position tracking error of the output link under the action of the LESO + SMC controller is relatively large due to the large predefined system disturbances, while with the designed LESO + SMC + EEC controller, the angular position of the output link can track the reference position trajectory with relatively small tracking error. For the stiffness tracking response curve of the EETS-based VSA under the LESO + SMC + EEC controller, the stiffness tracking error can be observed during t = 5–5.5 s and t = 10–10.5 s due to the change of predefined system disturbances. Moreover, small stiffness tracking error can be observed during the period of t = 7–8 s, which is caused by the change of angular position tracking trajectory, and the small angular position tracking error can be observed during t = 12.7–13.4 s due to the change of joint stiffness tracking trajectory. Therefore, the position tracking response curve and the stiffness tracking response curve interact with each other. As shown in Figure 2(b), the control inputs of the EETS-based VSA under the LESO + SMC + EEC controller are fluctuated on small ranges during the period of t = 5–5.3 s and t = 10–10.3 s, which is caused by the sudden change of the predefined disturbances, and the control inputs are compensated by the estimation error compensators. As shown in Figure 2(c), the response curves of the composite states are all within the mechanical allowable ranges (i.e.

Comparison of response curves of the EETS-based VSA corresponding to the LESO + SMC controller and the LESO + SMC + EEC controller: (a) comparison of output (i.e. position and stiffness) response curves of the EETS-based VSA, (b) comparison of response curves of the control inputs for the EETS-based VSA under these two controllers, and (c) comparison of response curves of the composite states for the EETS-based VSA. Note that the predefined disturbances imposed on EETS-based VSA are shown in Table 1. LESO: linear extended state observer; SMC: sliding mode control; EEC: estimation error compensation; EETS: equivalent exponential torsion spring; VSA: variable stiffness actuator.
From the simulations shown in Figure 2, it can be concluded that the proposed EEC measures are helpful to reduce the system output tracking errors and improve the disturbance rejection performance of the controller. Moreover, the influence of the EEC measures on the control input is acceptable.
Simulation and analysis of the effect of EEC on tracking control of the antagonistic VSA based on EETS corresponding to comparison settings 2
In order to further demonstrate the effect of estimated error compensation measures on tracking performance, the simulations under the LESO + SMC + ISC controller
40
and the LESO+SMC+ISC+EEC controller are shown in Figure 3. The parameters of the adaptive ISC laws for these two controllers are all set as

Comparison of response curves of the EETS-based VSA corresponding to the LESO + SMC + ISC controller 40 and the LESO + SMC + ISC + EEC controller: (a) comparison of output response curves of the EETS-based VSA, (b) comparison of response curves of the control inputs for the EETS-based VSA, and (c) comparison of response curves of the composite states for the EETS-based VSA. Note that the predefined system disturbances are shown in Table 1. LESO: linear extended state observer; SMC: sliding mode control; ISC: input saturation compensation; EEC: estimation error compensation; EETS: equivalent exponential torsion spring; VSA: variable stiffness actuator.
As shown in Figure 3, the slight angular position tracking error and the stiffness tracking error can be observed during t = 5–6 s and t = 10–11 s, which are caused by predefined system disturbance. Moreover, the angular position tracking errors during t = 12.5–13.5 s and t = 18–19 s are caused by the change of the stiffness reference trajectory, and the stiffness tracking errors during t = 7–8 s and t = 15–16 s are caused by the change of the position reference trajectory. In order to show more clearly the effect of the EEC measures on tracking performance, the tracking errors and the controlling energy consumptions are shown in Table 3. The abbreviations in Table 3 are defined as
Comparison of the effects of EEC on tracking performance of the EETS-based VSA.

LESO: linear extended state observer; SMC: sliding mode control; ISC: input saturation compensation; EEC: estimation error compensation; EETS: equivalent exponential torsion spring; VSA: variable stiffness actuator.
According to the simulation comparisons shown in Figure 3 and Table 3, it can be concluded that the proposed EEC measures are beneficial to reduce the system output tracking errors, and the introduction of the EEC measures does not make the response of the control input worse.
Simulation and analysis of the effect of EEC on tracking control of the antagonistic VSA based on EETS corresponding to comparison settings 3
In order to further demonstrate the robustness of the designed controller and the effectiveness of the proposed novel EEC measures in reducing tracking errors, the simulation results with time-varying external disturbances based on the LESO + SMC + ISC (WODEG) controller and the LESO + SMC + ISC + EEC (WODEG) controller are depicted in Figure 4. Note that WODEG (without considering the damping coefficients and the gravity effect parameter) indicates that the friction damping coefficients and the gravity effect parameter are set to zero directly in the calculation process of the controller, namely,

Comparison of response curves of the EETS-based VSA corresponding to the LESO + SMC + ISC (WODEG) controller and the LESO + SMC + ISC + EEC (WODEG) controller: (a) comparison of output response curves of the EETS-based VSA, (b) comparison of response curves of the control inputs for the EETS-based VSA, and (c) comparison of response curves of the composite states for the EETS-based VSA. LESO: linear extended state observer; SMC: sliding mode control; ISC: input saturation compensation; EEC: estimation error compensation; EETS: equivalent exponential torsion spring; VSA: variable stiffness actuator; WODEG: without considering the damping coefficients and the gravity effect parameter.
In this simulation, the characteristic equations of the LESO are set to
Because
From the simulation results shown in Figure 4, it can be observed that the LESO + SMC + ISC + EEC (WODEG) controller can simultaneously realize the tracking control of position and stiffness of the EETS-based VSA although the nominal values of the viscous friction coefficients and the gravitational effect parameter are directly defined as zero in the process of controller calculation. The comprehensive comparison of Figure 4 and Table 4 shows the robustness of the LESO + SMC + ISC + EEC (WODEG) controller and the effectiveness of the proposed EEC measures in reducing the system output tracking error and improving the disturbance suppression performance of the controller. According to the simulation settings and simulation results in this section, it is worth mentioning that the proposed novel EEC measures will play a more significant role in reducing the system output tracking errors when the system is subject to time-varying external disturbance.
Comparison of the effects of EEC on tracking performance of the EETS-based VSA.

LESO: linear extended state observer; SMC: sliding mode control; ISC: input saturation compensation; EEC: estimation error compensation; EETS: equivalent exponential torsion spring; VSA: variable stiffness actuator; WODEG: without considering the damping coefficients and the gravity effect parameter.
Simulation and analysis of the effect of EEC on tracking control of the Compact-VSA corresponding to comparison settings 1
In order to validate the effectiveness and adaptability of the proposed EEC measures in tracking control of the Compact-VSA and reduce the complexity of the controller, the simulation comparison based on the LESO + SMC controller and the LESO + SMC + EEC controller is depicted in Figure 5. In order to demonstrate that the designed controller can achieve simultaneous position and stiffness tracking control of the Compact-VSA, the combined reference trajectories (i.e. the combination of step trajectories and sinusoidal trajectories) are selected in this simulation.

Comparison of response curves of the Compact-VSA corresponding to the LESO + SMC controller and the LESO + SMC + EEC controller: (a) comparison of output response curves of the Compact-VSA, (b) comparison of response curves of the control inputs for the Compact-VSA, and (c) comparison of response curves of the composite states for the Compact-VSA. Note that the system disturbances imposed on the VSA system are shown in Table 2. LESO: linear extended state observer; SMC: sliding mode control; EEC: estimation error compensation; VSA: variable stiffness actuator.
In this simulation, the initial system states are set to
As shown in Figure 5(a), compared with the output response curves based on LESO + SMC controller, the output response curves based on LESO + SMC + EEC controller can track the reference trajectories more quickly. Due to large tracking errors, large system disturbances and EEC provided by estimation error compensators, the response curves of the control inputs of the Compact-VSA under the LESO + SMC + EEC controller are fluctuated during the initial stages of tracking. During t = 5–6 s, t = 10–10.5 s, and t = 17–17.5 s, the stiffness tracking errors under the LESO + SMC + EEC controller can be observed, which are caused by the sudden change of the system disturbances. During t = 3.5–4 s and t = 7–7.5 s, small stiffness tracking errors can also be observed due to the change of position tracking trajectory. As shown in Figure 5(c), the variation ranges of response curves of the lever arm and the angular deflection of the Compact-VSA are all within the mechanical allowable range (i.e.
The abbreviations in Table 5 are defined as
Comparison of the effects of EEC on tracking performance of the Compact-VSA.

LESO: linear extended state observer; SMC: sliding mode control; EEC: estimation error compensation; VSA: variable stiffness actuator.
Simulation and analysis of the effect of EEC on tracking control of the Compact-VSA corresponding to comparison settings 2
Similar to the simulation comparison shown in the “Simulation and analysis of the effect of EEC on tracking control of the antagonistic VSA based on EETS corresponding to comparison settings 3” subsection, in this simulation,
The comparison results under these two controllers are depicted in Figure 6. Due to the change of predefined system disturbances, the joint stiffness tracking error shown in Figure 6(a) can be observed during t = 5–5.5 s, t = 10–10.5 s, and t = 17–17.5 s. In addition, the stiffness tracking error can also be observed during t = 9–9.5 s, t = 13–14 s, and t = 15.5–16 s, which is caused by the change of position reference trajectory. The comparison in Figure 6(b) shows that the control inputs under the LESO + SMC + ISC + EEC (WODEG) controller are compensated by the proposed EEC measures, and the fluctuation of the control inputs caused by this is observable.
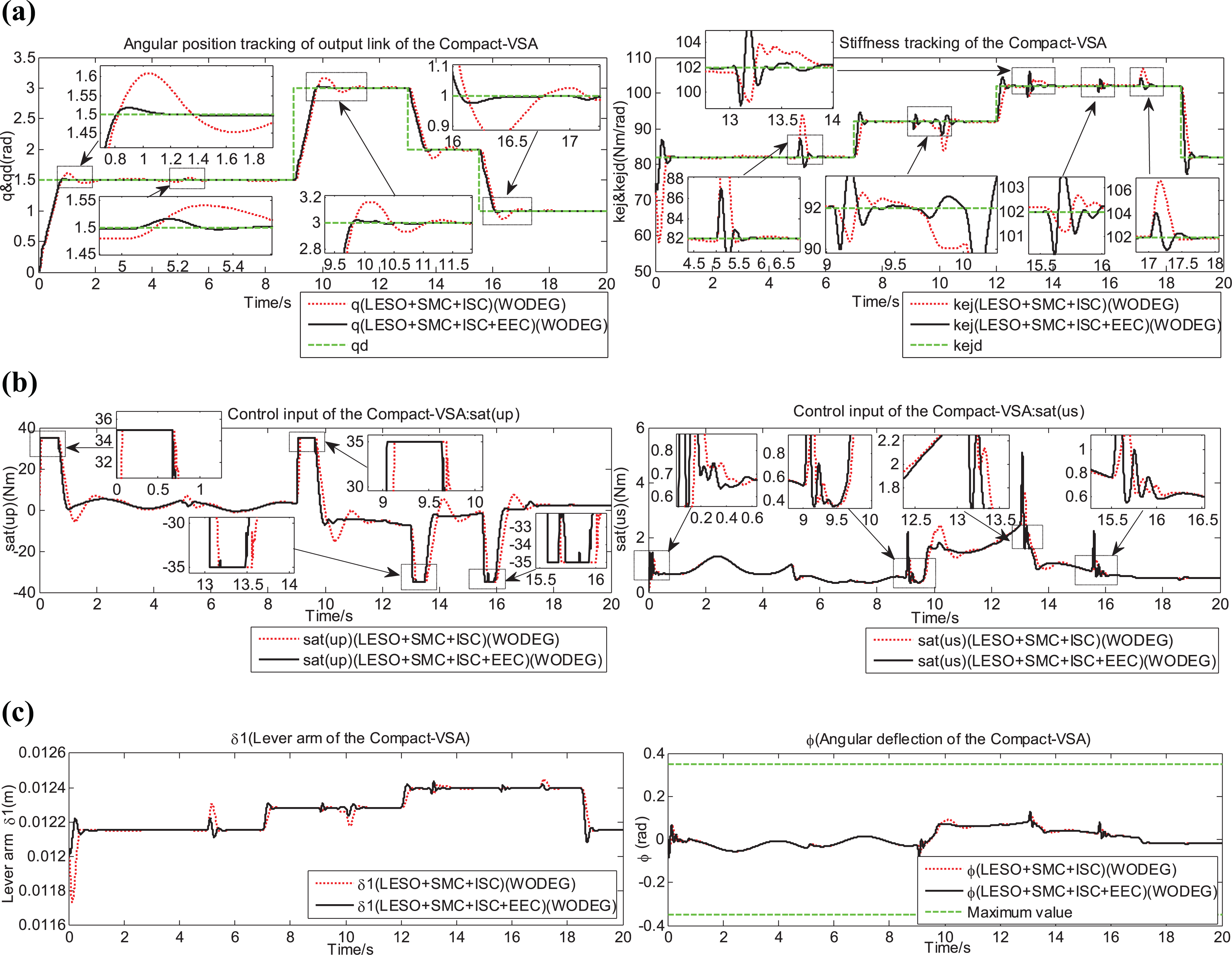
Comparison of response curves of the Compact-VSA corresponding to LESO + SMC + ISC (WODEG) controller and LESO + SMC + ISC + EEC (WODEG) controller: (a) comparison of output response curves of the Compact-VSA, (b) comparison of response curves of the control inputs for the Compact-VSA, and (c) comparison of response curves of the lever arm and the angular deflection of the Compact-VSA. Note that the τ ext is reset to time-varying external disturbance. LESO: linear extended state observer; SMC: sliding mode control; ISC: input saturation compensation; EEC: estimation error compensation; VSA: variable stiffness actuator; WODEG: without considering the damping coefficients and the gravity effect parameter.
Finally, the simulation comparison results of Figure 6 and Table 6 show that the proposed EEC measures are helpful to reduce the system output tracking errors, and the designed controller based on LESO with EEC has good adaptability and the ability to deal with large model uncertainties.
Comparison of the effects of EEC on tracking performance of the Compact-VSA.

LESO: linear extended state observer; SMC: sliding mode control; ISC: input saturation compensation; EEC: estimation error compensation; VSA: variable stiffness actuator; WODEG: without considering the damping coefficients and the gravity effect parameter.
Conclusion
In this article, a robust tracking controller based on the LESO with EEC is designed to achieve simultaneous position and stiffness tracking control of the EETS-based VSA 15,20,40 (i.e. a representative VSA in the class of antagonistic VSAs based on ENTS) and the Compact-VSA 9 (i.e. a representative VSA in the class of SVSAs based on lever mechanisms). Firstly, considering the parametric uncertainties, the unknown friction torques acting on the driving units, the unknown external disturbance acting on the output link, and the input saturation constraints in the system dynamic models of these two classes of VSAs (i.e. the antagonistic VSAs based on ENTSs and the SVSAs based on lever mechanisms), the state space models with composite disturbances and input saturation constraints are proposed. Then, by using the nonlinear coordinate transformation, the state space models of these two classes of VSAs are transformed into integral chain pseudo-linear systems with the same structural form. Subsequently, by extending the matched lumped disturbances in the integral-chain pseudo-linear system to two new system states, an extended integral chain pseudo-linear system is obtained, and a LESO with input saturation constraints is designed to estimate the unknown states of the extended pseudo-linear system. Considering the input saturation constraints in the extended pseudo-linear systems and the estimation errors of the LESO with fixed preset observation gains, the adaptive ISC laws and the novel estimation error compensators are designed. Finally, a robust tracking controller based on LESO, SMC, ISC, and EEC is obtained. To the best of our knowledge, this is the first study to design the estimation error compensators for the estimation errors of the LESO with fixed observation gains, and the design inspiration of the estimation error compensators come from the stable SISO DOB. The tracking errors of the system can be effectively reduced by skillfully combining the LESO and the SISO DOB. The proposed estimation error compensator innovatively extends the DOB to the error estimation application of the LESO, and this error compensation design idea can be applied to more general system tracking control based on ESO 29 –40 (i.e. LESO or NESO) or DOB. 26 –28 Based on the stability analysis of the candidate Lyapunov function, the semi-global ultimate uniformly bounded stability of the closed-loop system under the designed LESO + SMC + ISC + EEC controller is proved, and the guidances for controller parameter settings are discussed.
In order to demonstrate the effectiveness, robustness, and adaptability of the designed LESO + SMC + ISC + EEC controller and the effect of the estimated error compensation measures on tracking performance, the simulation studies are carried out. The main purposes of these simulations are presented in the following three aspects: The first purpose of these simulations is to show the effect of the proposed EEC measures on tracking performance. The simulation comparisons include: the tracking response curves under the LESO + SMC controller are compared with those under the LESO + SMC + EEC controller, and the tracking response curves under the LESO + SMC + ISC controller
40
are compared with those under the LESO + SMC + ISC + EEC controller; and the tracking response curves under the LESO + SMC + ISC (WODEG) controller are compared with those under the LESO + SMC + ISC + EEC (WODEG) controller. These simulation comparison studies demonstrate the effectiveness of the proposed EEC measures in reducing the system output tracking errors. The second purpose of these simulations is to demonstrate the robustness and effectiveness of the designed LESO + SMC + ISC + EEC controller in tracking control. In particular, the simulations under the LESO + SMC + ISC + EEC (WODEG) controller demonstrate the ability of the designed controller to deal with large model uncertainties. The simulation results show that the designed controller can achieve simultaneous position and stiffness tracking control of these two classes of VSAs (i.e. the antagonistic VSA based on ENTS and the SVSA based on lever mechanism). The third purpose of these simulations is to demonstrate the extensive adaptability of the designed LESO + SMC + ISC + EEC controller in the tracking control of these two classes of VSAs. As the representatives of the antagonistic VSA based on ENTS and the SVSA based on lever mechanisms, although the EETS-based VSA and the Compact-VSA have different dynamic models and variable stiffness principles, the designed controller is suitable for the tracking control of these two VSAs. This is because although the system dynamic models of the EETS-based VSA and the Compact-VSA are different, they can be transformed into extended integral chain pseudo-linear systems with the same structural type. Because the decoupling matrices of these two VSAs are both nonsingular, the designed controller based on LESO with EEC can achieve simultaneous position and stiffness tracking control.
It should be noted that when the control scheme proposed in this article is implemented, the high-performance CPU, the high-speed data acquisition, and communication hardware equipment should be used in the hardware design to ensure the real-time control. In addition, in the calculation of the LESO + SMC + ISC + EEC (WODEG) controller, the friction damping coefficients and the gravity effect parameters are set to zero directly. This setting will help to reduce the computational burden of the controller, and the simulation results show that the controller still has good robust tracking performance under this setting (i.e.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.