The major contribution of this study is the feedback design of a finite-time convergence sliding mode control to solve the trajectory-tracking problem in a class of mechanical systems. Some advantages are that the controller presents a continuous signal by integration of the high-frequency switching term. Another benefit is the design and implementation of an uncertainty and disturbance estimator (UDE) to robustify the closed-loop system. We use Lyapunov tools to develop the closed-loop stability analysis and to give an expression of the convergence time t through this, we can reduce the convergence time by tuning the gains of the controller. We illustrate the performance of the proposed control structure via numerical simulations conducted for a mass-spring-damper system and experiments developed in a pendular system.
Since the first computers emerged, it has become possible to apply the first tracking control algorithms.1,2 Currently, tracking control of mechanical systems is a problem addressed by the research community with a wide range of applications within the industry.3–5 Currently, the major challenge is to improve the performance of the tracking control algorithm. With regard to tracking control, some inconveniences to deal with are parametric uncertainties and disturbances, many control techniques have been addressed to mitigate or eliminate these drawbacks, such as PID control,6,7 adaptive control,8,9 sliding mode control10,11 among others.12–14
In this paper, the aim is to improve the performance of a trajectory-tracking algorithm based on sliding mode control. In this sense, some studies related to this topic are15: presented a passivity-based dynamic sliding mode control (DSMC) that guarantees a continuous control signal and global exponential convergence of tracking errors. Another work Shao et al.5 proposed a robust recursive sliding mode controller combined with an adaptive disturbance observer (RSM-ADO), some advantages of this controller are finite-time convergence to zero of the tracking errors and a lack of chattering effects. In the previous work of Shao et al.16 is developed a robust tracking controller based on barrier function adaptive sliding mode (BFASM), where the tracking error can converge to a predefined small region around zero in finite-time. The authors of Sun et al.17 designed a nested adaptive super-twisting sliding mode (NASTSM) control scheme for a vehicle Steer-by-Wire (SbW) system, they expressed the plant model as a second-order differential equation; this application has a chattering effect that affects the tracking error. In Fei and Lu18 they proposed an adaptive fractional order sliding mode controller with a neural estimator for a class of systems with nonlinear disturbances, where the effect of the adaptive law was visible through the slow convergence of the estimation of the parameters.
More recently Kao et al.,19 discussed an integral sliding mode control that stabilizes a class of uncertain switched hyperbolic systems (USHSs) and guarantees asymptotic stability of the closed-loop dynamics. The authors of Baba et al.20 proposed an integral sliding mode controller using a passivity-based approach to solve the regulation problem. They confirmed that their method ensures Lyapunov stability even if the discontinuous sliding mode controller is replaced by its continuous approximation to reduce chattering phenomena. In Shen et al.,21 researchers investigated the tracking control problem for an entry vehicle subject to uncertainty and input saturation. They proved finite-time stability by employing Lyapunov theory and the bi-limit homogeneity technique. The problem of a reentry vehicle subject to uncertainty was studied by Shen et al.,22 where they proposed a continuous adaptive super-twisting sliding mode control (ASTSMC) law that provides finite-time altitude-tracking control. The ASTSMC law achieved fast convergence, improved control gain, and reduced the chattering phenomena.
The controller proposed in this work takes advantage of previous sliding mode controllers, such as the asymptotic sliding mode control,23,24 where its primary advantage is chattering attenuation by integration of the discontinuous control while closed-loop system dynamics remain robust to bounded perturbations and parametric uncertainties; terminal sliding mode control,25,26 where its major advantage is the finite-time convergence of the closed-loop trajectories to the equilibria while keeping robustness properties, and the concept of equivalent control,27,28 which is used to estimate the bounded disturbances and parametric uncertainties after the closed-loop trajectories reach the sliding surface; by this way it is designed and proposed an outstanding control algorithm. The main contributions of this study are summarized as follows:
The designed controller presents finite-time convergence to a zero tracking error despite bounded disturbances and parametric uncertainties. We give the expression of the convergence times in the stability analysis section.
The stability analysis presents the time expressions of the finite-time convergence of both the auxiliary sliding variable surface and the sliding surface.
The control signal is continuous, we achieve this by integrating the high-frequency function. We propose an auxiliary sliding variable in addition to a sliding surface to achieve chattering attenuation. The uncertainties and disturbances must be bounded and their derivatives must be bounded to make the control algorithm workable.
We designed an uncertainty and disturbance estimator (UDE) using the concept of equivalent control, which recovers the pooled uncertainties and disturbances. The experimental section demonstrates the advantages of using this estimator.
The remainder of this paper is organized as follows. This paper presents the class of mechanical systems addressed in Section 2 along with the proposed control structure to solve the tracking problem. We develop finite-time terminal sliding mode control in Section 3, including the design of the sliding auxiliary variable and the sliding surface . Section 4 presents the finite-time stability proof of the closed-loop system and convergence times for each stage. In Section 5, we use MATLAB to perform a numerical simulation of the proposed control structure applied to a mass-spring-damper system and compare the proposed controller against other sliding mode controllers such as terminal sliding mode control, asymptotic sliding mode control, and super-twisting control. In Section 6, the proposed control structure is tested through experiments conducted using a pendular system. We implemented a UDE to deal with uncertainties and disturbances, to illustrate its functionality, we turned this UDE off after 6.8 s of elapsed the experiment. Finally, Section 7 provides conclusions regarding the proposed control structure for solving the tracking problem in a class of mechanical systems.
Problem statement
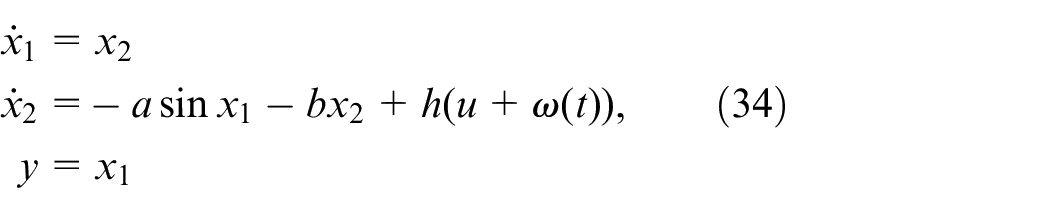
The problem addressed in this study is the finite-time trajectory-tracking control of a one-degree-of-freedom (one-DOF) mechanical system. The following state-space equations govern the dynamics of the class of systems considered in this study:
where and are nonlinear functions, and is defined for all and is the disturbance term, which may comprise parameter uncertainties and external perturbations. The term is assumed to be upper bounded by a constant and in addition, that it is smooth with bounded time derivative . Note that the one-DOF manipulator falls under the assumption given by the equations in (1). For system (1) the proposed finite-time tracking control design is as follows
where is the part of the controller that adds robustness to the closed-loop system, and the rest of the terms are plant parameters and the double derivative of the desired trajectory, both of which are known and are used for compensation purposes. Substituting (2) into (1) the closed-loop system stands as
Let us rewrite the system (3) as a function of the position error and the velocity error , where is the desired trajectory assumed to be at least twice differentiable. Therefore,
system (4) has the structure of a double-integrator system.
Finite-time terminal sliding mode design
To design a control that brings together the advantages mentioned above, let us begin by considering
the idea of (5) is to attenuate chattering by integrating the discontinuous controller . Therefore, we propose the following sliding surface:
where constants and . In order to achieve chattering attenuation we propose the following auxiliary variable
where constants and . Now, to prove the convergence of the closed-loop trajectories to the auxiliary variable let us fulfill the reachability condition ,
substituting and derived from (6) into (8) give us,
from (9) we can propose the discontinuous control law that fulfill
substituting (10) into (9) we have that
where
and
considering , where is a positive constant. Therefore, using inequality (11), the reachability condition is satisfied, whereas . Note that the term can be included within the control law (10); however, this term causes most of the singularities that appear in the closed-loop system. To avoid various singularities in the closed-loop system, we do not include this term in (10). Instead of doing this, we consider it as a perturbation overtaken by the gain .
Uncertainty and disturbance estimator
The design of the uncertainty and disturbance estimator (UDE) is based on the concept of equivalent control, using this concept we can estimate , the purpose is to use this estimation as feedback in the controller , in this sense we can reduce the finite-time convergence of the trajectories as proven later, also, it can be reduced the amplitude of , in this scenario the constant value instead of cope with will need to deal , where is the uncertainty and disturbance estimation, keep in mind that , the concept is explained as follows where the condition yields
where is the time when becomes zero, and the trajectories and remain on the auxiliary variable thereafter. A control function that satisfies (12) can be computed as
according to Utkin et al.29 the equivalent control can be estimated (online) as follows
where is a low-pass filter applied to the high-frequency switching term . There is a wide variety of low-pass filter that can be implemented, for instance, we can implement the following first-order low-pass filter
where is a small positive scalar that represents the filter time constant. Therefore the disturbance and parametric uncertainty terms can be estimated as
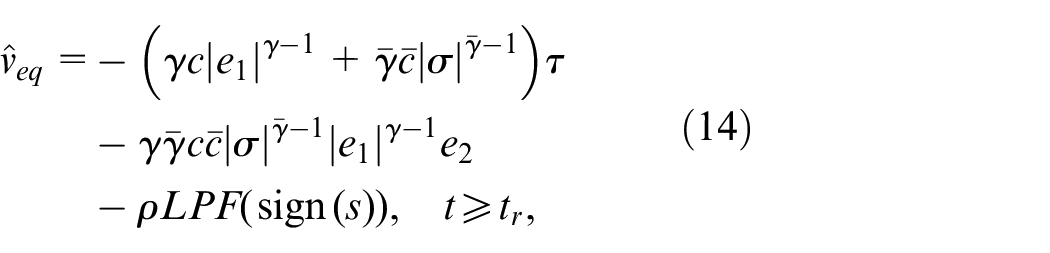
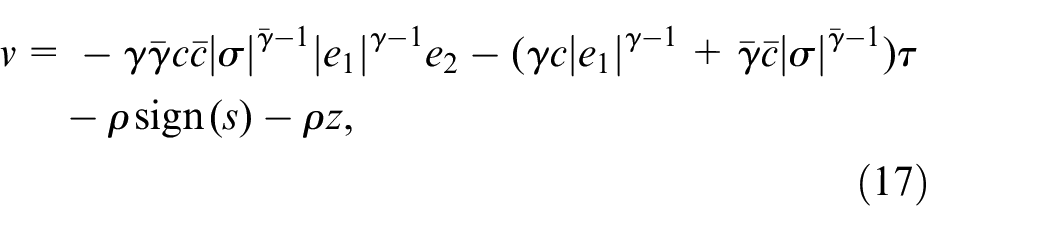
notice that , this term is assumed to be bounded by a constant , by consequence . Now, the output of the filter (15) can be implemented in the controller to reduce the amplitude of if it is required as follows
substituting (17) into (9) we have that
Therefore, using the inequality (18), the reachability condition is satisfied, whereas .
RemarkThe proposed controller (2), (5)-(7) and (17) comprises six gain parameters. The gain parameter denotes the amplitude of the discontinuous term and the amplitude of the uncertainty and disturbance estimation in (17), also through we can change the time of convergence of to zero, as proven in the next section. The auxiliary variable has two constant gain parameters and , these parameters are related to the time of convergence of the sliding variable to zero. The sliding surface contains two gain parameters, and , these parameters can modify the time of convergence of and to zero. Finally, is the only parameter of the UDE which stands for the time constant of the filter.
Finite-time stability analysis
Theorem 1.Consider the perturbed system (1) under the control law (2), (5), and (17), then the error dynamics and of the closed-loop system (4) converge to the equilibria in finite-time given by .
Proof. The finite-time stability analysis is conducted by finding the convergence times according to the following sequence:
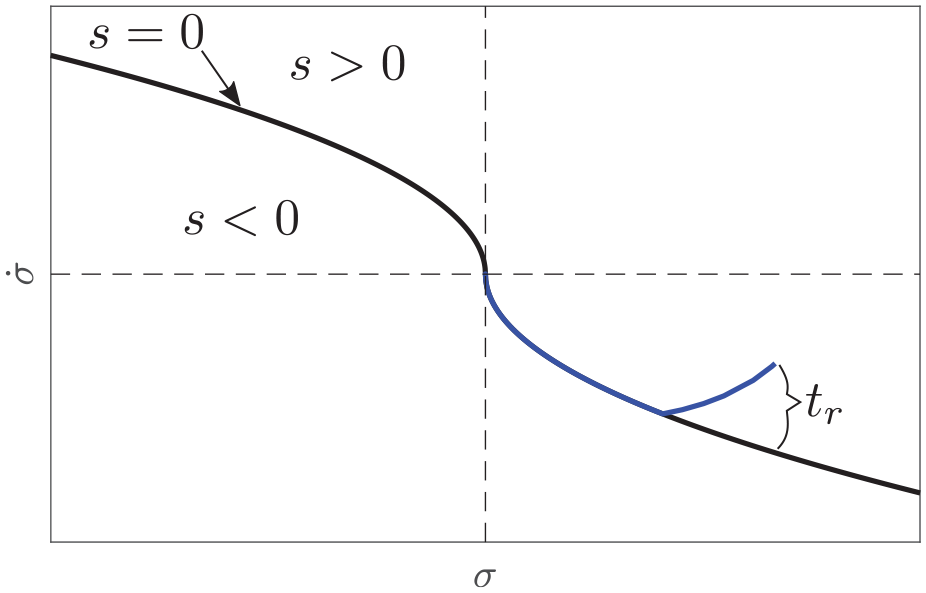
we will find the time , this is when the auxiliary variable from any initial condition and the trajectories remain there, we can see an illustration of the time segment in Figure 1,
second, let us find the time , this is when the sliding variable ,
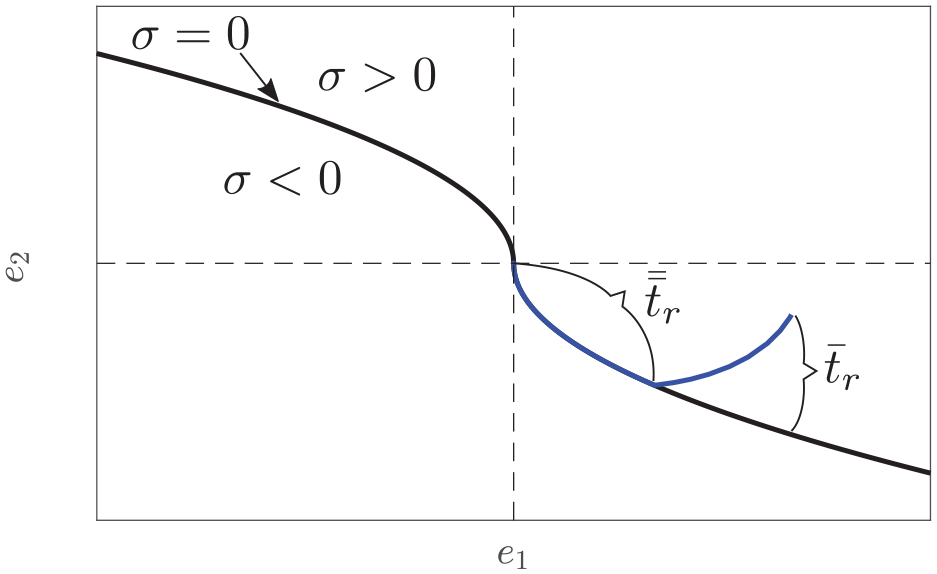
finally, we will get the time which show us when and , an illustration of the times and is displayed in Figure 2,
An illustration of the convergence time to the auxiliary variable .
Sketch of the convergence time to the sliding surface and convergence time to the equilibria.
For this purpose let us use the following quadratic function
the derivative along the trajectories of (12) and (17) is given by
by integration of inequality (20), and considering we can get the time
the time can be rewritten as
Note that, as we commented in the previous section, the time can be reduced by using the uncertainty and disturbance estimation because of ; if we do not use the estimator mentioned above, we would have instead of (22). Therefore, although we use the same value of will be reduced if the UDE is used. Once the trajectories and are on the sliding variable , the reduced-order dynamics are obtained from
the equilibrium point of (23) is the origin; consider that the initial condition of is assessed in which is the time when the trajectories are on and remain on it. Let us prove the finite-time convergence of (23) to the origin using the following positive-definite function
Note that is locally Lipschitz, and is differentiable at any point except at . Therefore, computed along the trajectory exists almost everywhere. The time derivative of (24) along the trajectories of (23) is given by
from (25) it can be ensure the finite-time convergence to the equilibrium point, now by integration of inequality (25) we can get that time expression named ,
by substituting the time from (22) into (25) we have the time when and go to zero
Finally, let us get the time which indicate us when and , the procedure is quite similar to the one used to get therefore some parts are omitted. Let us begin by defining the reduced-order dynamics when obtained from (6)
the initial condition is and it occurs at . The stability proof is like the one presented starting from (24), therefore in this case the time is given by
by substituting the time from (27) into (29) we find
this inequality gives us the time the trajectories and reach equilibrium. In the hypothetical case, when there are no disturbances and parametric uncertainties affecting the closed-loop system, there is no need for the estimation , we can use the controller given in (10), hence the time becomes
Thus, the finite-time stability proof is completed.
Numerical simulation
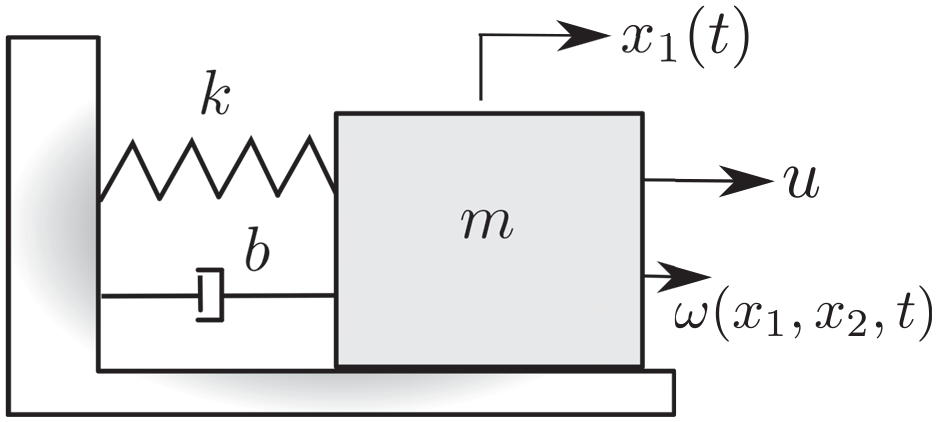
Let us test the proposed controller (2), (5)-(7), (17), in a mass-spring-damper system depicted in Figure 3, whose dynamic equations are given as follows
where denotes the mass, denotes the damping coefficient, and denotes the spring stiffness. The measurable states are the position and the velocity , and the uncertainty and disturbance term is considered upper bounded by a constant . The proposed finite-time tracking controller is designed according to (2) as,
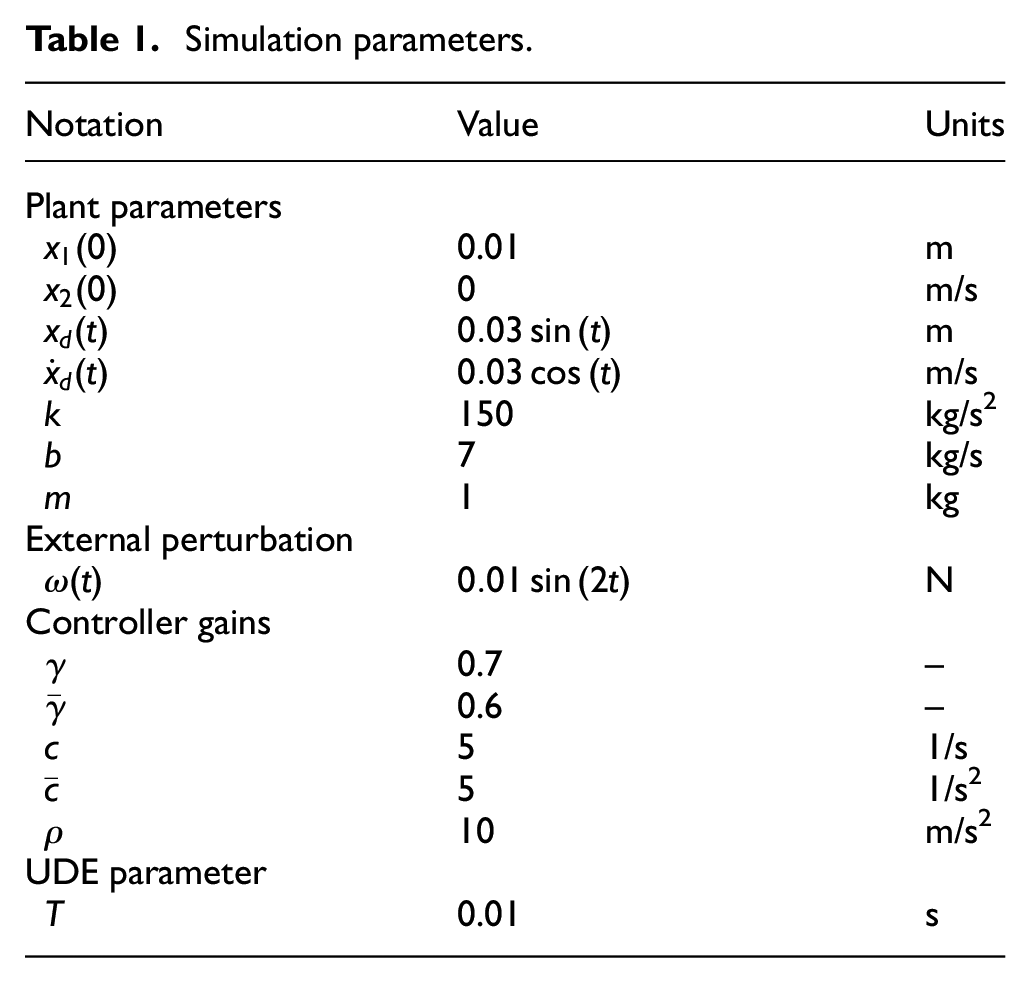
where is the dynamic part of the controller , with initial condition . The core of the controller is in as previously presented in (17); the position error is and the velocity error is . The numerical simulation was developed in Matlab using the parameters presented in Table 1,
Mass-spring-damper system.
Simulation parameters.
Notation
Value
Units
Plant parameters
0.01
m
0
m/s
m
m/s
150
kg/s2
7
kg/s
1
kg
External perturbation
N
Controller gains
0.7
–
0.6
–
5
1/s
5
1/s2
10
m/s2
UDE parameter
0.01
s
For a comparison, we will test the proposed controller against similar controllers. We considered some of these controllers within the design of the proposed control approach, such as terminal sliding mode and asymptotic sliding mode. Let us show the key characteristics of these controllers in Table 2
Sliding mode controllers.
Sliding mode controller
Sliding variable convergence
Output tracking convergence
Type
Terminal
Finite-time
Finite-time
Discontinuous
Asymptotic
Asymptotic
Asymptotic
Continuous
Super-twisting
Finite-time
Asymptotic
Continuous
Proposed
Finite-time
Finite-time
Continuous
The terminal sliding mode controller is applied using the control structure of (33), where and the sliding surface are given by
The gain parameters are set as , and .
We consider the asymptotic sliding mode controller using the control structure of (33), under the dynamic part of the control as in (5), where
the sliding surface is and its derivative . The gain parameters are c = 70, , and .
We take the control structure of (33) and the dynamic control as follows to consider the super-twisting controller.
where denotes the sliding surface. The gain parameters were set as c = 15, and . The results obtained were as follows:
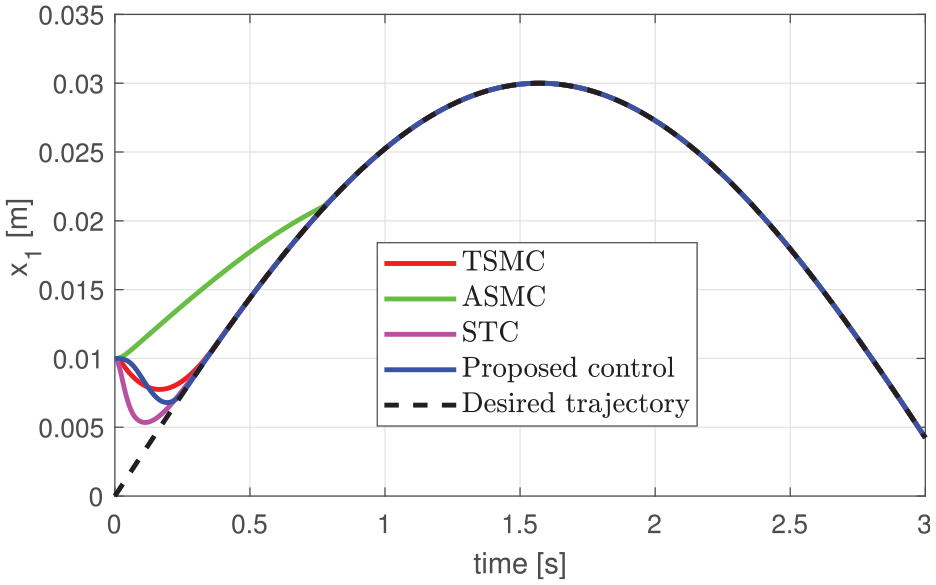
Four controllers were considered for comparison. Figure 4 shows the positions following the desired tracking reference , where the results indicate that the proposed controller is in good agreement with other controllers.
Trajectory tracking of (black dashed line); (simulation).
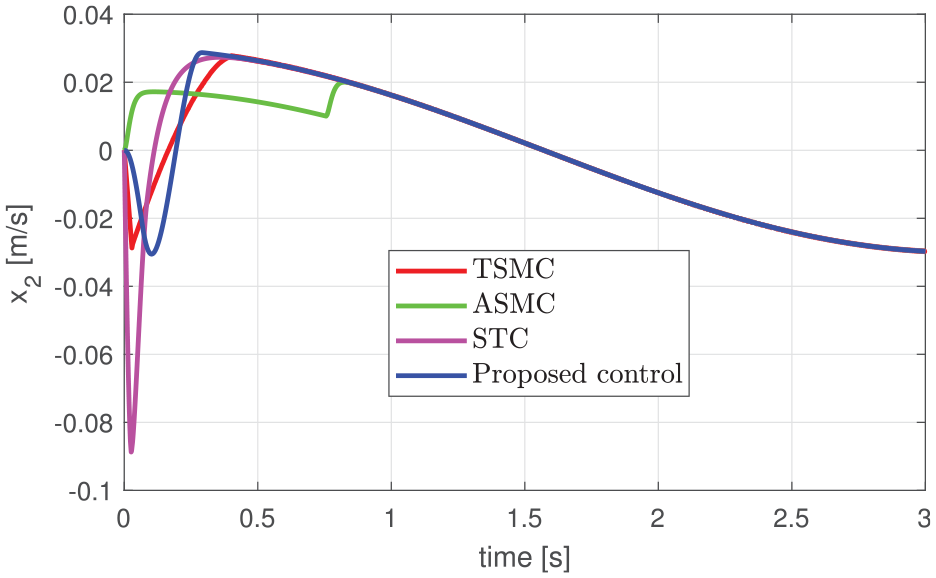
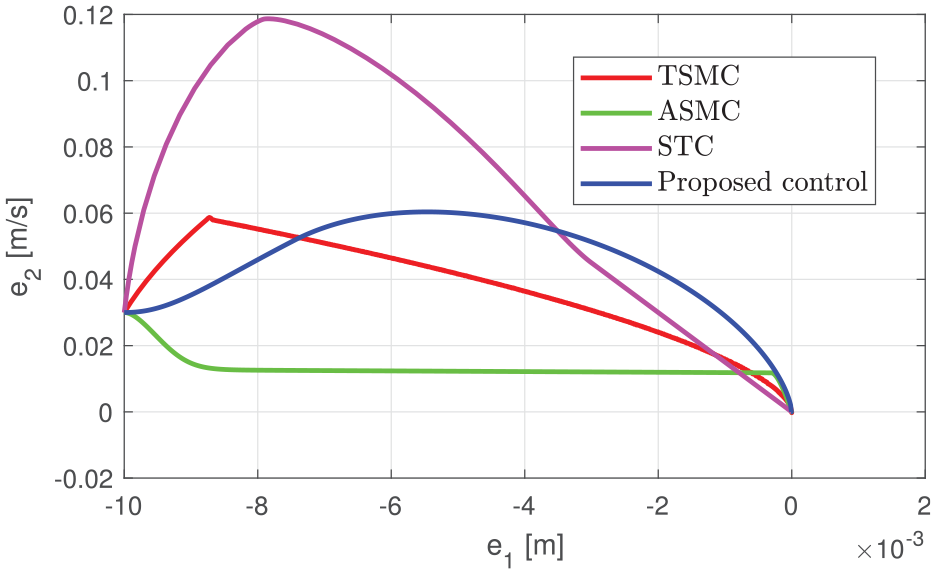
The phase portraits are depicted in Figure 6. Although the proposed control approach has a relatively smooth convergence to the equilibria, the trajectories and reach the equilibria in finite-time.
Phase portrait versus , (simulation).
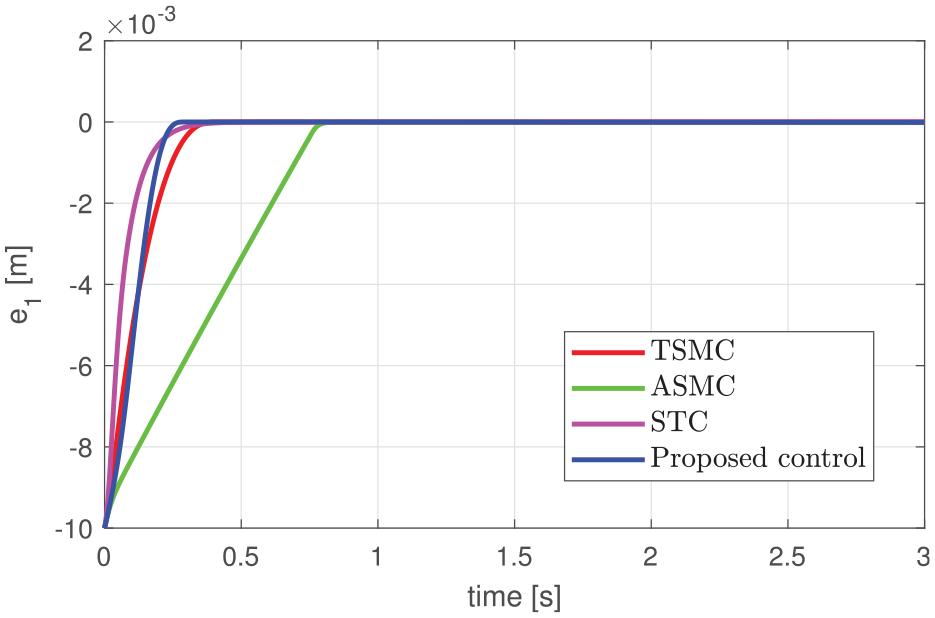
We can observe from Figure 7 that the proposed controller exhibits excellent performance by showing the convergence of the position error , which we intend to take to zero in finite-time. Note that only the proposed controller and the terminal sliding mode control can achieve finite-time convergence of the variable to zero, and the remaining controllers exhibit asymptotic convergence.
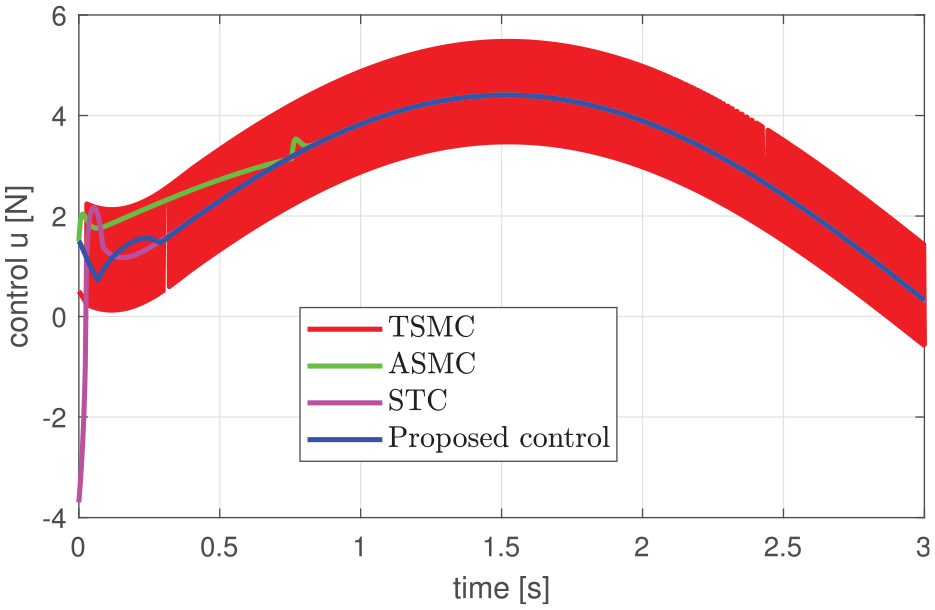
The control action is presented in Figure 9, note that the terminal sliding mode control action is discontinuous, whereas the rest of the control actions are continuous.
Control signal , (simulation).
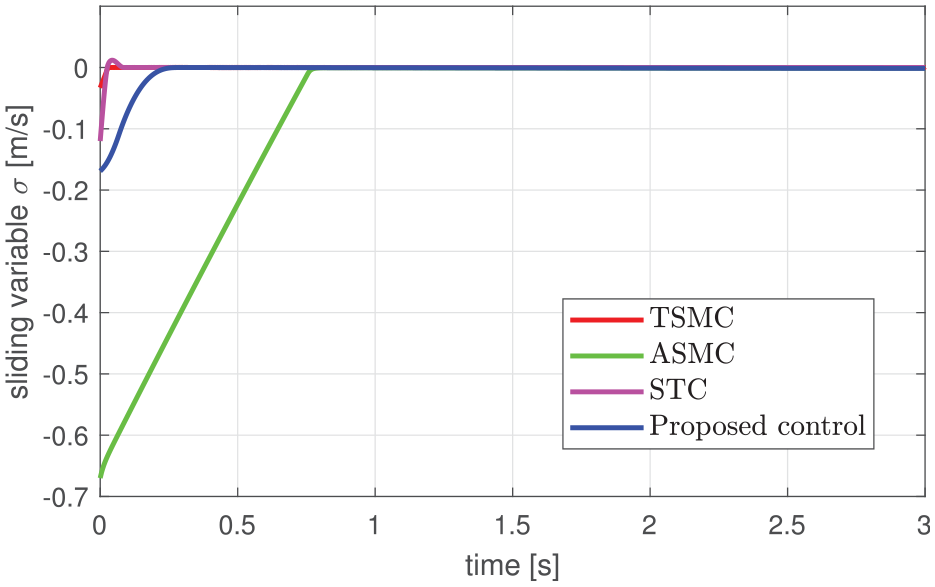
All sliding mode controllers considered in this numerical simulation have a sliding variable , whose convergence is presented in Figure 10.
Sliding variable , (simulation).
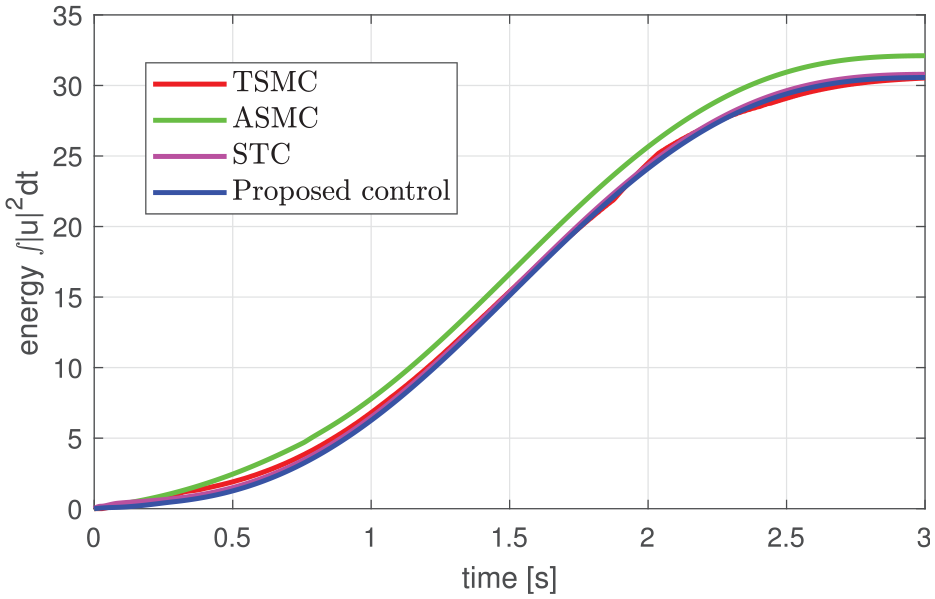
The energy signal derived from the control action is presented in Figure 11.
Energy signal , (simulation).
Experiments
Now, let us test the proposed controller (2), (5)–(7), and (17), in a pendulum platform see Figure 12. The dynamic model of the pendulum is given as follows
where , and are plant parameters previously identified, stands for the pendulum position and denotes the velocity. The only measured variable is the position . The proposed controller is
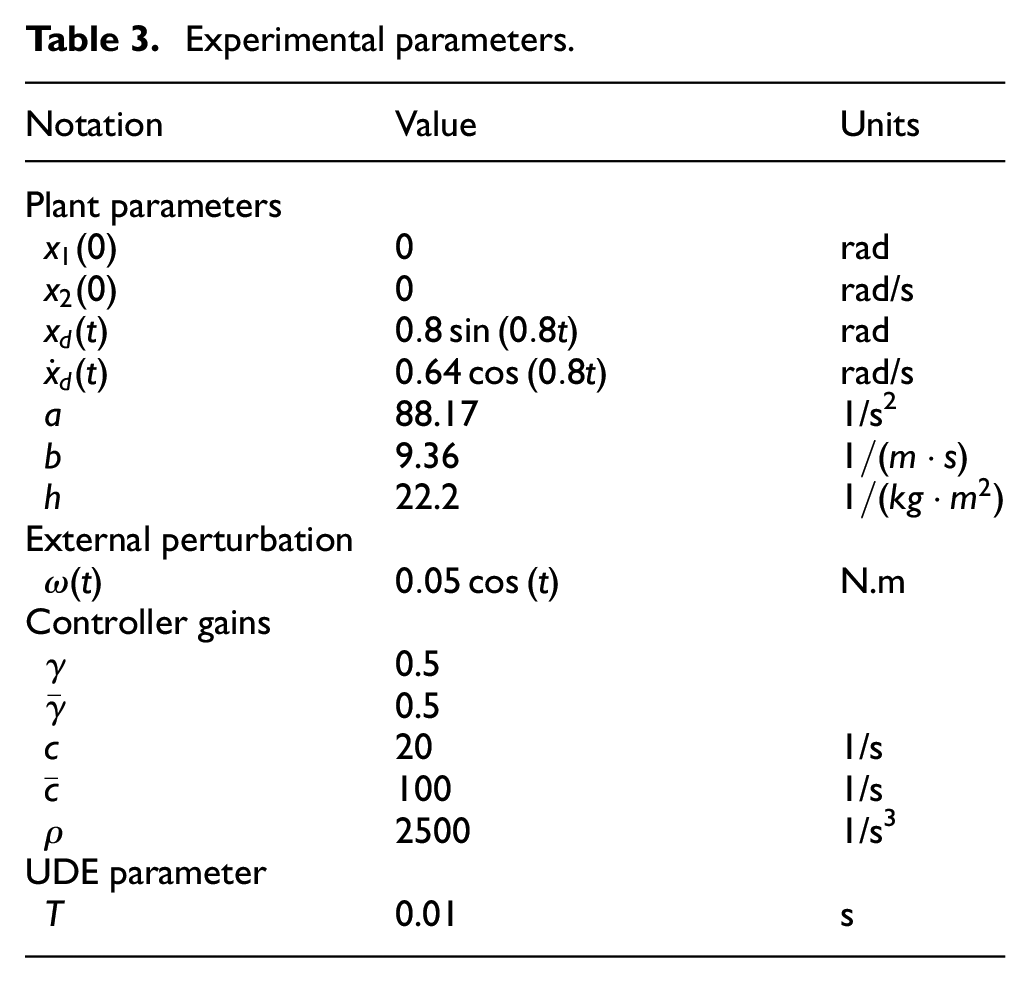
where is the observed velocity and the robust part of the controller is taken from (5) and (17). The experimental parameters are shown in Table 3,
Pendulum platform, (experiment).
Experimental parameters.
Notation
Value
Units
Plant parameters
0
rad
0
rad/s
rad
rad/s
88.17
1/s2
9.36
22.2
External perturbation
N.m
Controller gains
0.5
0.5
20
1/s
100
1/s
2500
1/s3
UDE parameter
0.01
s
To estimate the velocity, a discontinuous observer is applied,30 the structure of the observer is as follows
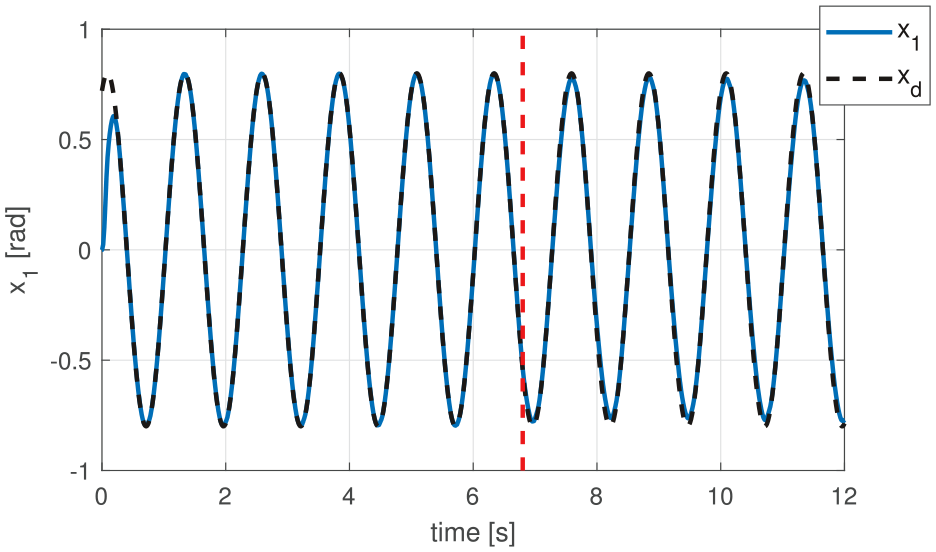
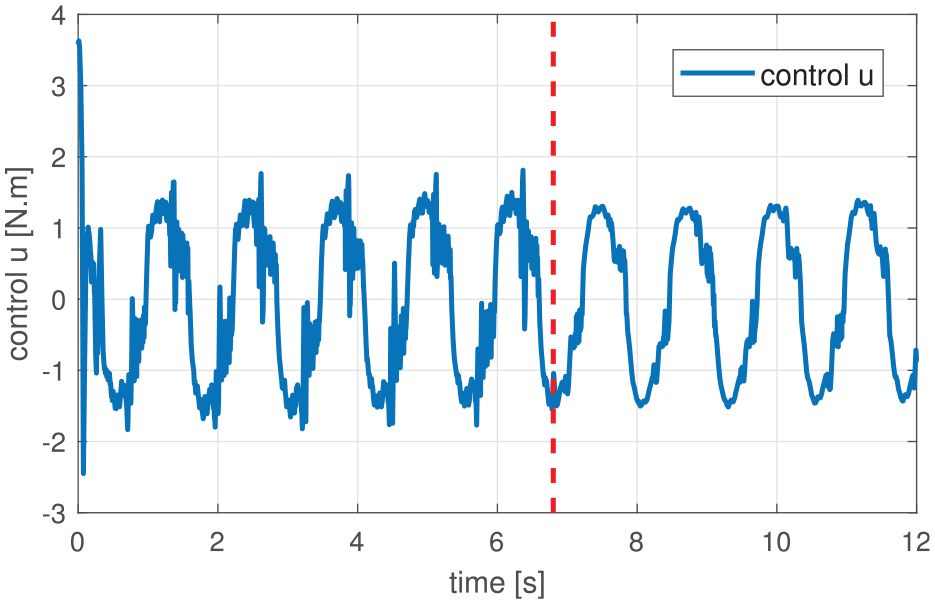
where the observer gains are , , and . To account for the effectiveness of the uncertainty and disturbance estimator (UDE), after 6.8 s of the elapsed experiment, we turn the UDE off. We present the results of trajectory tracking in Figure 13, revealing a slight increase in the tracking error when the UDE is turned off after 6.8 s of the experiment.
Trajectory tracking of (black dashed line), (experiments).
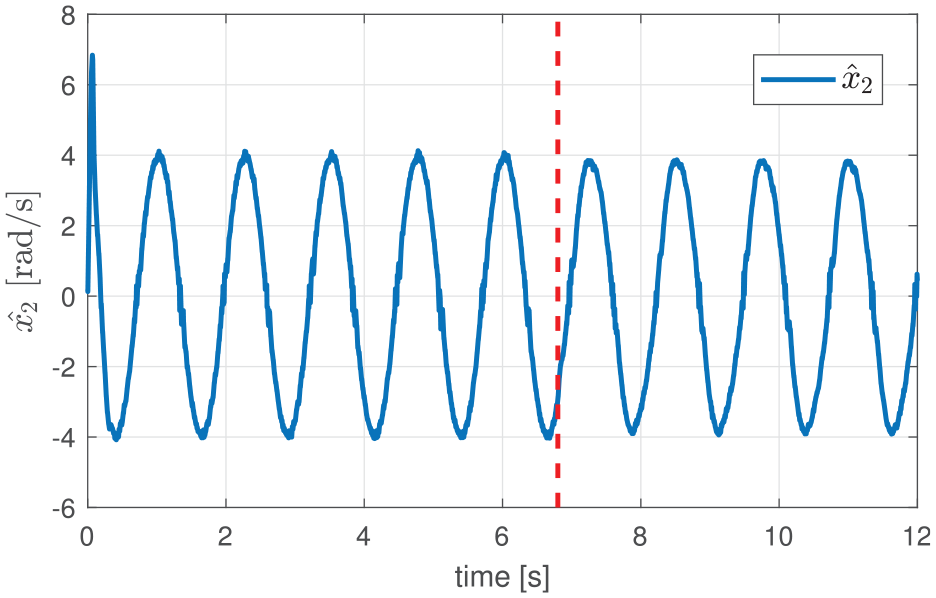
The velocity estimated by the discontinuous observer (36) is shown in Figure 14.
Estimated velocity , (experiments).
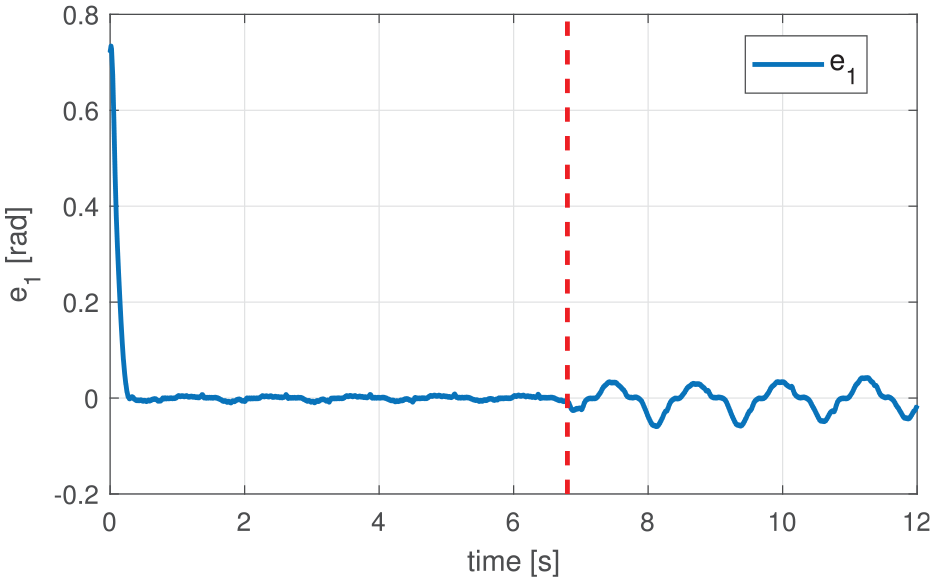
We show the tracking error in Figure 15, after 6.8 s of starting the experiment and turning off the UDE the tracking error increases.
Trajectory tracking error , (experiments).
The control signal which is a torque in is presented in Figure 16
Control signal , (experiments).
Conclusion
This study introduced a novel approach to solving the trajectory-tracking problem in a class of mechanical systems. We took advantage of previous sliding mode controllers. For example, the continuous control signal concept was taken from asymptotic sliding mode control, the finite-time convergence of the tracking error from terminal sliding mode control, and the estimator of uncertainties and disturbances was designed using the equivalent control concept.
We presented a rigorous stability analysis based on Lyapunov’s theory. We proved that one can find suitable gains to ensure finite-time convergence of the tracking error to zero, meaning by this that the auxiliary sliding variable and the sliding surface also converge to zero in finite-time.
A numerical simulation in MATLAB was performed against other sliding mode controllers, where better performance results were achieved using the proposed tracking solution. The advantages of the proposed controller are presented in Table 2. Experiments on the pendular system confirmed the theoretical results of the benefits of using the UDE in a closed-loop system. For this purpose, we turned the UDE off 6.8 s after initializing the experiments, showing a worsening response in the trajectory-tracking error.
Future efforts will be made to simplify the design of the robust tracking controller, preserving the advantages of having a continuous control signal and finite-time convergence of tracking errors.
Footnotes
Acknowledgements
The authors would like to acknowledge José Alejandro Rembao-Osuna, student of master in science at Universidad Autónoma de Baja California for his support in conducting the experiments in this work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Raúl Rascón
References
1.
NottermanJMPageDE. Evaluation of mathematically equivalent tracking systems. Percept Mot Skills1962; 15(3): 683–716.
2.
KodaliVP. A study of the applications of analog computers. IEEE Trans Ind Electron Control Instrum1967; IECI-14(1): 1–7.
3.
XiaoBYangXKarimiHR, et al. Asymptotic tracking control for a more representative class of uncertain nonlinear systems with mismatched uncertainties. IEEE Trans Ind Electron2019; 66(12): 9417–9427.
4.
DawsonDMHuJBurgTC. Nonlinear control of electric machinery. Boca Raton, FL: CRC Press, 2019.
5.
ShaoKZhengJWangH, et al. Recursive sliding mode control with adaptive disturbance observer for a linear motor positioner. Mech Syst Signal Process2021; 146: 1–16.
6.
LefeberAAJ. Tracking control of nonlinear mechanical systems. Eindhoven: universiteit Twente Enschede, 2000.
7.
ChoiYChungWK. PID trajectory tracking control for mechanical systems. Berlin, Heidelberg: Springer Science & Business Media, 2004. Vol. 298.
8.
HuXWeiXZhangH, et al. Robust adaptive tracking control for a class of mechanical systems with unknown disturbances under actuator saturation. Int J Robust Nonlinear Control2019; 29(6): 1893–1908.
9.
ZhangMMaXRongX, et al. Adaptive tracking control for double-pendulum overhead cranes subject to tracking error limitation, parametric uncertainties and external disturbances. Mech Syst Signal Process2016; 76-77: 15–32.
10.
SunGMaZ. Practical tracking control of linear motor with adaptive fractional order terminal sliding mode control. IEEE/ASME Trans Mechatron2017; 22(6): 2643–2653.
11.
UtkinVGuldnerJShiJ. Sliding mode control in electromechanical systems. Boca Raton, FL: CRC press, 2017.
12.
RenXLewisFLZhangJ. Neural network compensation control for mechanical systems with disturbances. Automatica2009; 45(5): 1221–1226.
13.
Kohn-RichSFlashnerH. Robust fuzzy logic tracking control of mechanical systems. J Franklin Inst2001; 338(2-3): 353–370.
14.
YuanWXSunWLiuZG, et al. Adaptive fuzzy tracking control of stochastic mechanical system with input saturation. Int J Fuzzy Syst2019; 21: 2600–2608.
15.
Parra-VegaVHirzingerG. Chattering-free sliding mode control for a class of nonlinear mechanical systems. Int J Robust Nonlinear Control2001; 11(12): 1161–1178.
16.
ShaoKZhengJWangH, et al. Tracking control of a linear motor positioner based on barrier function adaptive sliding mode. IEEE Trans Ind Inform2021; 17(11): 7479–7488.
17.
SunZZhengJManZ, et al. Nested adaptive super-twisting sliding mode control design for a vehicle steer-by-wire system. Mech Syst Signal Process2019; 122: 658–672.
18.
FeiJLuC. Adaptive fractional order sliding mode controller with neural estimator. J Franklin Inst2018; 355(5): 2369–2391.
19.
KaoYLiuXSongM, et al. Non-fragile-observer-based integral sliding mode control for a class of uncertain switched hyperbolic systems. IEEE Trans Automat Contr2023; 68: 5059–5066.
20.
BabaTFujimotoKMarutaI. A passivity-based integral sliding mode controller for mechanical port-hamiltonian systems. IEEE Control Syst Lett2023; 7: 2946–2951.
21.
ShenGXiaYCuiB, et al. Integral terminal slidingmode-based singularity-free finite-time tracking control for entry vehicle with input saturation. Aerosp Sci Technol2023; 136: 1–10.
22.
ShenGXiaYZhangJ, et al. Adaptive super-twisting sliding mode altitude trajectory tracking control for reentry vehicle. ISA Trans2023; 132: 329–337.
23.
ShtesselYBShkolnikovIABrownMDJ. An asymptotic Second-Order Smooth Sliding Mode Control. Asian J Control2003; 5(4): 498–504.
24.
MirkinBGutmanPOShtesselY. Asymptotic sliding mode control approach to adaptive distributed tracking problem for multi-agent nonlinear delayed systems. Int J Control2012; 85(11): 1671–1682.
25.
WuYYuXManZ. Terminal sliding mode control design for uncertain dynamic systems. Syst Control Lett1998; 34(5): 281–287.
26.
YuXFengYManZ. Terminal Sliding Mode Control – an overview. IEEE Open J Ind Electron Soc2021; 2: 36–52.
27.
UtkinVI. Sliding modes in control and optimization. Boca Raton, FL: Springer Science & Business Media, 2013.
28.
ShtesselYEdwardsCFridmanL, et al. Sliding mode control and observation. New York, NY: Springer, 2014. Vol. 10.
29.
UtkinVGuldnerJShiJ. Sliding mode control in electromechanical systems. London: Taylor & Francis, 1999. pp.118–119.
30.
RosasDAlvarezJRosasP, et al. Robust observer for a class of nonlinear siso dynamical systems. Math Probl Eng2016; 2016: 1–9.