
Abstract
This article concentrates on the study of finite-time attitude stabilization for a rigid spacecraft with output constraints. The dynamics of the spacecraft are expressed by modified Rodrigues parameters, so that the singularity of covariance matrix owing to quaternion’s redundancy is eliminated. Based on the backstepping technique in combination with adding a power integrator technique, the attitude stabilization control law is constructed. Rigorous mathematical proof shows that the closed-loop system is finite time stable and all the outputs remain bounded by using a barrier Lyapunov function technique. The effectiveness of the proposed finite-time stabilization scheme is verified by a simulation example.
Keywords
Introduction
As is well-known, all practical systems are subject to physical constraints. Ignoring these constraints’ effects may result in undesirable performance degradation, safety matters, and even the instability of the system. How to effectively compensate the effect of the constraints in the control design has always been a practically important research task. For these reasons, the study of the control problem for systems subject to constraints has received more and more attention by researchers. 1 –7
Control problem of the spacecrafts with input constraints has gained increasing attention 8 –12 in the last decades. Considering the actuator saturation constraints, an adaptive dynamic inverse control was developed to handle the spacecrafts maneuver tracking problem in the study by Tandale and Valasek. 13 Ruiter 14 presented a nonlinear adaptive controller for spacecraft attitude tracking under actuator saturation. Bustan et al. 15 designed a fault-tolerant attitude controller based on variable structure control theory for spacecraft with input saturation and actuator failure. The work within the study by Wang et al. 16 described a discrete gain scheduled controller to handle the robust control problem for circular orbital spacecraft rendezvous system with consideration of the input saturation.
Although various schemes have been studied for the constrained control problem, such as neural networks (NNs) control 17 –19 and adaptive fuzzy control 20 . However, there have been relatively few works on finite-time attitude stabilization for spacecrafts with output constraints in the literature. In fact, it is ordinary that system outputs have to be bounded within certain ranges for physical application. The violation of the output constraints during operation may lead to undesirable performance or system damage. Thus, we should attach great importance to the output constraints from a practical viewpoint, and it is significant to handle the control design problems for the output-constrained systems. To make the outputs remain a bounded range, the barrier Lyapunov functions (BLFs) have been widely proposed to guarantee that constraints are not violated; Tee et al. 21,22 studied two adaptive controls for nonlinear systems with output constraint. And various types of BLF were appeared, for example, the log-type BLF by Tee et al., 21 the integral-type BLF by Tee and Ge, 23 the tan-type BLF by Jin, 24 and so on. The work within the study by Ren et al. 25 described an output feedback-based adaptive neural control algorithm for a class of nonlinear systems with output constraint which can ensure that the closed-loop system is uniformly bounded. In the study by Li and Li, 26 an adaptive NN controller is proposed for a class of continuous stirred tank reactor with output constraint and uncertainties by using BLF to satisfy the constraints. Tension control as well as vibration control of moving string with consideration of the output constraints is concerned by using BLF technique by He et al. 27
In recent years, finite-time control has received much interests from researchers since it can provide more advantages, such as faster convergence rate, higher performance of precision control, and better property of disturbance rejection. 27 –34 The major difference between a finite-time controller and an asymptotical controller is that the former can guarantee the convergence of system states to its equilibrium point in a finite time. 35 Finite-time control is meaningful to spacecrafts and it leads to enhanced application efficiency. 36 –43 Within the work by Du et al., 44 finite-time attitude tracking control of a single spacecraft as well as the finite-time attitude synchronization of a group spacecraft have been concerned by using continuous finite-time control technique to design the control law. In the study by Lu and Xia, 45 adaptive terminal sliding mode control is utilized to design the finite-time attitude tracking control for rigid spacecraft. In the study by Song et al., 46 spacecraft attitude control problem is studied by using a fast terminal sliding mode control technique with double closed loops. Two nonlinear proportional–derivative (PD) controllers were presented by Su and Zheng 47 to design the global finite-time stabilization law for a rigid spacecraft.
Finite-time stabilization by considering states constraints can improve the control performance. In the study by Xia et al., 48 an adaptive fuzzy controller is designed to address the finite-time tracking control problem for a class of strict feedback nonlinear systems with full state constraints. Based on adding a barrier integrator technique, adaptive fuzzy finite-time control strategy is proposed for a class of nonlinear switched systems by Zheng and Li. 49 In the study by Du et al., 50 by using NNs, finite-time theory, and BLFs, an adaptive finite-time control approach is constructed to three degrees of freedom active suspension systems. In this article, the problem of finite-time attitude stabilization of a rigid spacecraft in the face of output constraints is investigated inspired by above discussion. The main work and contributions of the article lie in the following:
This work studies the problem of attitude stabilization with output constraints for a rigid spacecraft system. By using BLFs, the system outputs are constrained in a reasonable range, and it further enhances the system safety.
The output-constrained problems are considered in the finite-time control design process, which is more general for applications in practical engineering. The desired performance of the closed-loop system can be guaranteed by appropriately selecting the design parameters.
The proposed scheme effectively limited the transient overshoot of the system outputs as well as the property of finite-time convergent is achieved, and the finite-time stable of the resulting closed-loop system with output constraints is rigorously proved.
The rest of the article is organized as follows. The second section provides a brief overview of the problem formulation and preliminaries. In the third section, we present the basic idea of the detailed implementation of an adaptive finite-time control for a spacecraft with output constraints. In order to verify the effectiveness of the proposed approach, simulation experiments are performed and analyzed in the fourth section. Finally, concluding remarks are given in the last section.
Problem statement
Kinematics and attitude dynamics
For the parameterizations of three-dimensional coordinate expression, modified Rodrigues parameters (MRPs)
51,52
are used in this article to describe the attitude of spacecrafts with respect to an inertial coordinate. It is denoted by


with

where
Remark 1
When θ approaches
Remark 2
Simple algebraic manipulation shows that


Consider

where

By defining
Define


where

From the practical point of view, the output
The main objective of this work is to design a finite-time attitude stabilizer for an output-constrained spacecraft described by systems (1) and (2). The designed finite-time attitude stabilization law can ensure the global finite-time stability of the closed-loop system in the presence of output constraints.
Preliminaries
A BLF defined as follows is employed to prevent the outputs of system from violating their constraints.
Definition 1
A BLF defined with respect to the system
Remark 3
BLFs are a kind control Lyapunov functions (CLFs) whose values approach infinity if the state variable or the output tends to the constraint boundary. The logarithmic and tangent BLFs are widely used for constrained control design. 53
Lemma 1
For any constant


where

in the set
Lemma 2
Considering the nonlinear system in the form of 30,31

where
Thus, the origin of system (15) is locally finite-time stable. The settling time, which depends on the initial state

for all x
0 in some open neighborhoods of the origin. If

is globally finite-time stable.
Lemma 3
If continuous function
Lemma 4
Consider
Lemma 5
Consider
Lemma 6
For the given positive real numbers m
1, m
2 and a function

where
Lemma 7
Consider
Proof 1
By lemma 4, we have

then

If
In the case of
Control design
The aim of the proposed control is to ensure that the output constraints are not violated with the property of finite-time convergence. The backstepping technique is used in the process of deriving control. The following steps describe the details of design procedure. Define the error
Assumption 1
The initial value of
Step 1. Consider a BLF candidate:

Then, we can obtain

The following virtual control law is chosen in this article

Considering equation (24) and substituting it into equation (23), one obtains

It follows lemma 4 that

Substituting equation (26) into equation (25), one obtains

By lemma 6, we obtain

where

Substituting equations (28) and (29) into equation (27), one obtains

Step 2. Consider Lyapunov function candidate

According to lemma 7,
32
we know that

Denote

where
Considering equation (24), one obtains
Therefore, we have

where
Considering lemma 3, one can obtain

Then, one obtains

where

Considering

Considering equations (30) and (39), denoting

If the input torque is designed as

where

Then, we have

Substituting this expression into equation (40), we have

Remark 4
Lyapunov function
Remark 5
From the above design procedure, we know that the constraint is applied to the virtual control signal
To this end, the main result of above design can be stated as follows.
Theorem 1
Consider the rigid spacecraft system model defined by equations (1) and (2), the proposed state feedback control law (41) can ensure the global finite-time stabilization of the closed-loop system at the origin and without violation of the output constraints, that is,
Proof 2
Consider lemma 3, we have

Let
According to Ren et al.,
25
we know that for any positive constant

Substituting equation (47) into equation (46), we have

Consider equations (41) and (48), we can obtain

By using lemma 2, the closed-loop system will convergent to origin within time T with

Therefore, the closed-loop system (1) and (2) with equation (41) is finite time stable within
Remark 6
The proposed control strategy not only can achieve finite-time stabilization but also can guarantee the output constraints. This is achieved by using the BLF. If the fraction power is chosen as
Remark 7
The proposed method can also use the stabilization problem with consideration of output constraints for other motion systems, such as robot systems and vehicle systems.
Simulation
To show the effectiveness of the proposed scheme, it is applied to a rigid spacecraft model with output constraints, and the detailed responses are numerically simulated and analyzed. The parameters are set as inertia moments
For the purposes of comparison, the developed controller is compared with the finite-time controller in the study by Su and Zheng
47
and PD control with the same initial conditions. The controller parameters were chosen by trial and error until the excellent performance was achieved in our simulation. The design parameter of proposed output-constrained finite-time stabilizer (41) is

where the vector
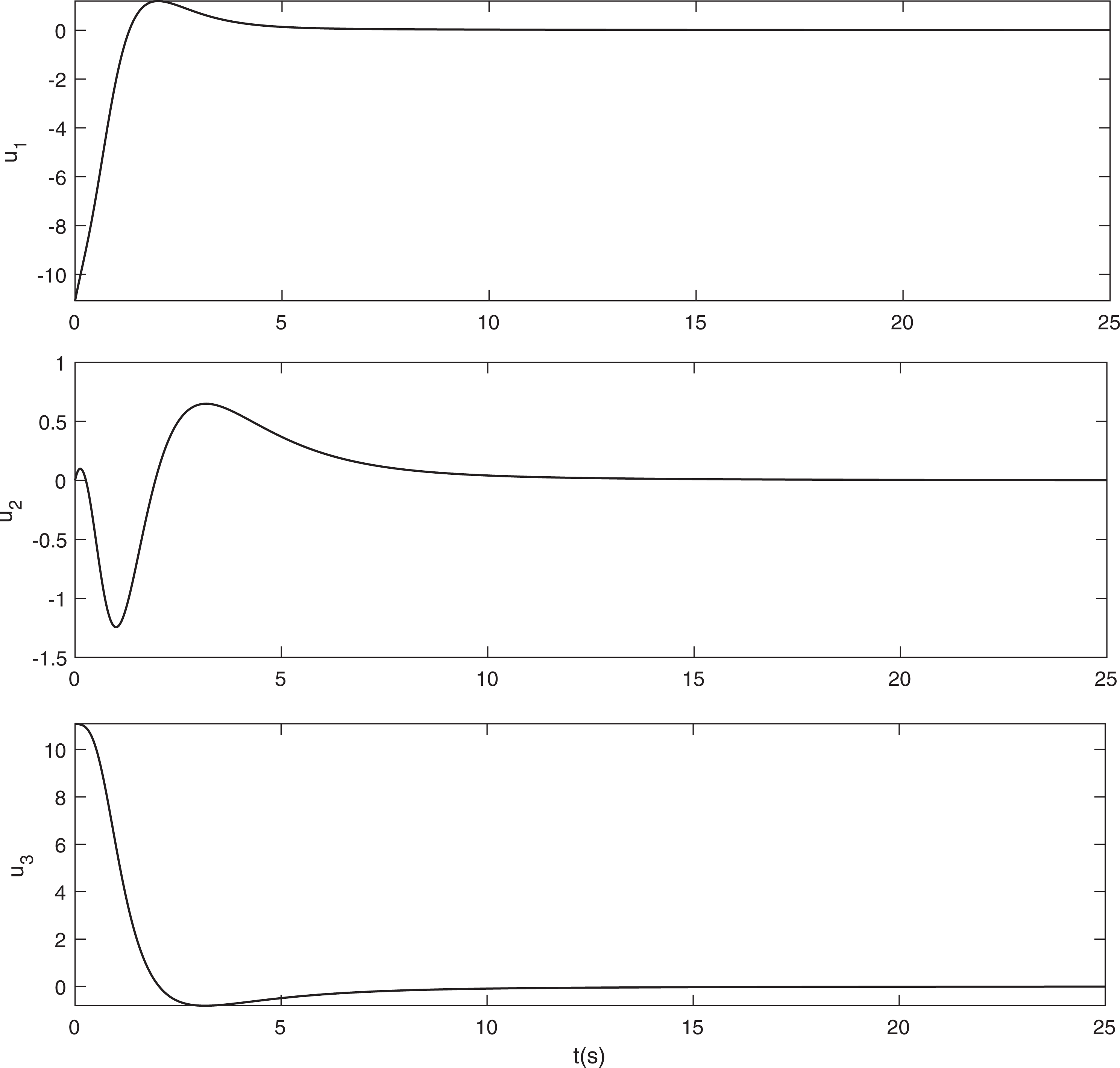
The comparative simulations are conducted, and the results are shown in Figures 1 to 5. Figure 1 shows the comparison results of the output responses by using PD method, FPD method, and the proposed method. It can be concluded that the proposed controller (41) guarantees that the origin of the closed-loop system is finite time stable quickly and the output constraints of system are not violated, while the system performance is significantly degraded using the PD controller. Figure 2 shows that the angle velocity responses are all converge to stable. Figures 3 to 5 show the actual control torques. It can be observed that all signals are bounded, and the control torques are all within the maximum allowable limits, that is, 40 Nm.

(a to c) Rodrigues parameters σ by using PD method, FPD method, and proposed method. PD: proportional–derivative; FPD: finite-time PD.

(a to c) Angular velocity ω by using PD method, FPD method, and proposed method. PD: proportional–derivative; FPD: finite-time PD.
(a to c) Control inputs u by using PD method. PD: proportional–derivative.
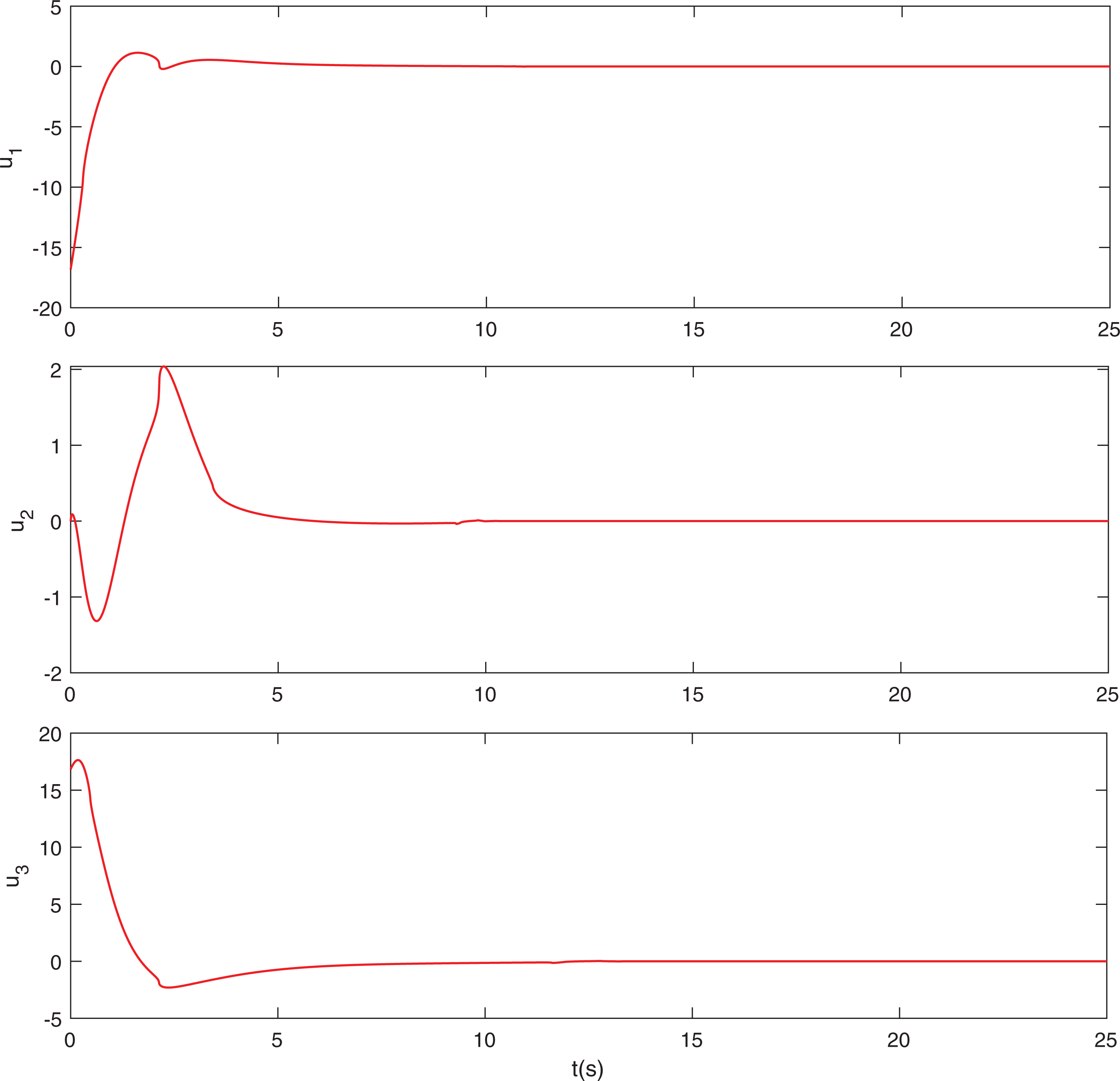
(a to c) Control inputs u by using FPD method. FPD: finite-time proportional–derivative.

(a to c) Control inputs u by using proposed method.
To investigate the performance of the closed-loop system under different selections of kb
, the simulation experiments have been carried out under

(a to c) Rodrigues parameters σ under different kb .

(a to c) Angular velocity ω under different kb .
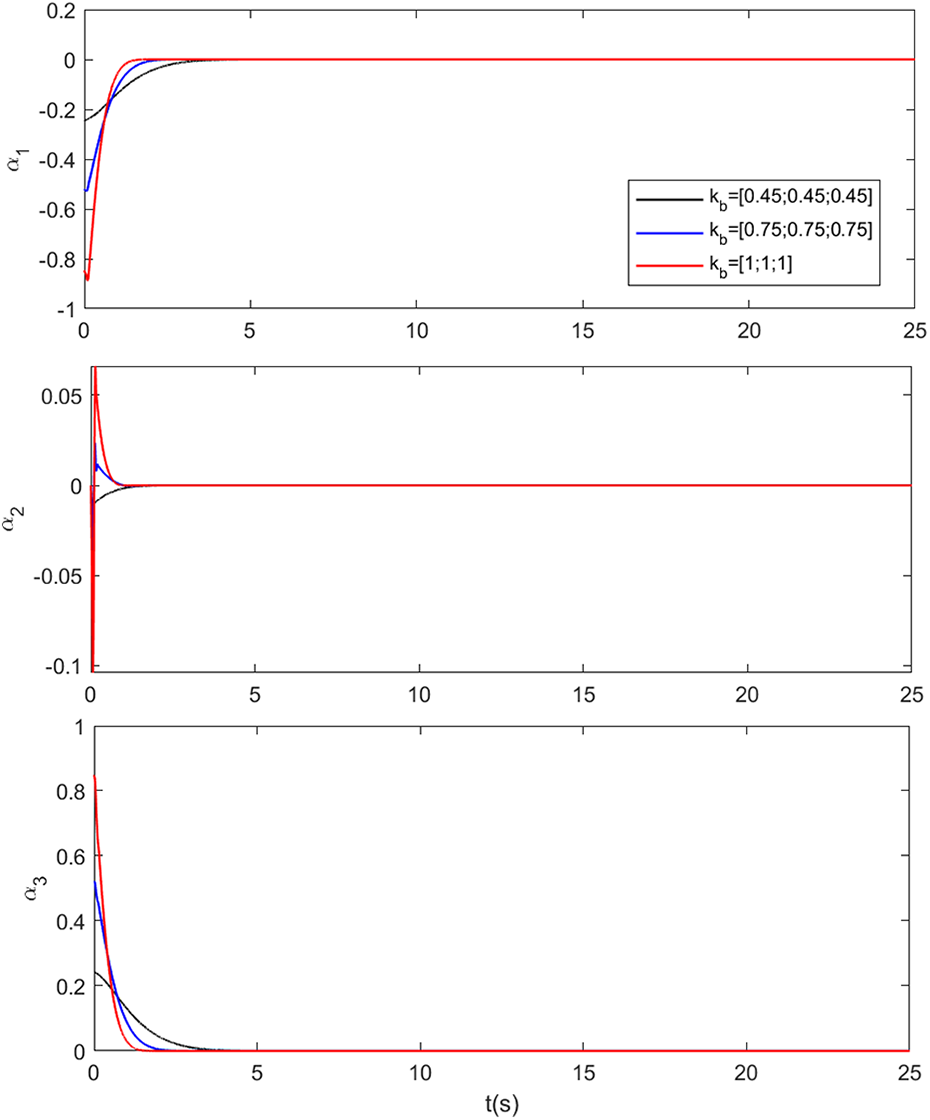
(a to c) Virtual control α under different kb .
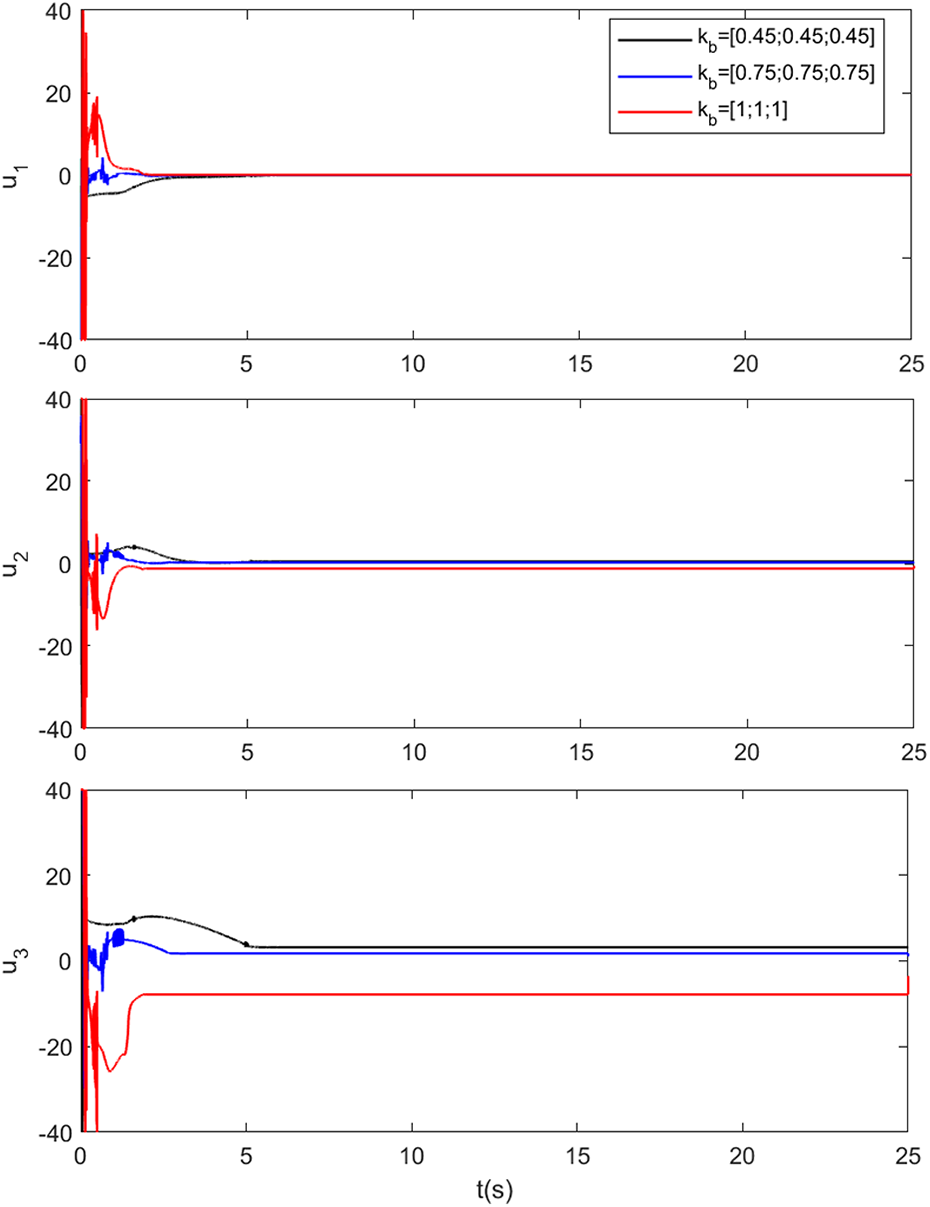
(a to c) Control inputs u under different kb .
Summarizing all the simulation results, it is noted that the proposed scheme can successfully accomplish attitude stabilization with high attitude pointing accuracy and stability in the presence of output constraints in both theory and simulations. In addition, comparison simulations were also performed to traditional PD control and simple FPD method by Su and Zheng 47 without considering the output constraints. These results show that the closed-loop system attitude stabilization is accomplished while meeting the constraints on the output.
Conclusion
This article has investigated the finite-time stabilization problem for an output-constrained rigid spacecraft based on finite-time control theory and the BLF technique. Under the proposed control, the closed-loop system is shown to be global finite time stable, and all the closed-loop signals are bounded. The results of simulation have verified that the proposed finite-time controller is feasible and effective in stabilizing the demanded attitude orientation for a rigid spacecraft with output constraints.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interests with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China under grant numbers 61203095 and 61403407.