In this article, a backstepping control scheme is developed for the motion control of a Three degrees of freedom (3DOF) model helicopter with unknown external disturbance, modelling uncertainties and input and output constraints. In the developed robust control scheme, augmented state observers are applied to estimate the unknown states, unknown external disturbance and modelling uncertainties. Auxiliary systems are designed to deal with input saturation. A barrier Lyapunov function is employed to handle the output saturation. The stability of closed-loop system is proved by the Lyapunov method. Simulation results show that the designed control scheme is effective at dealing with the motion control of a 3DOF model helicopter in the presence of unknown external disturbance and modelling uncertainties, and input and output saturation.
In recent years, unmanned aerial vehicles (UAVs) have been widely developed in various academic fields due to their variety of applications in civil and military tasks.1 Unmanned helicopters have advantages over other UAVs because of their unique features of hovering, vertical take-off and landing. In particular, image processing technologies can be introduced to improve the autonomy of the unmanned helicopter.2–7 However, the unmanned helicopter is a typical under-actuated multi-input–multi-output (MIMO) nonlinear system with coupling, nonlinearity, uncertainties and external disturbances.8,9 An effective flight control scheme is needed for the helicopter to ensure safe flight.
Up to now, many control methods have been applied to the flight control for the helicopters. Among earlier works, classical proportional–integral (PI) control systems have been used widely.10 With more and more complex flight environments, the traditional control techniques are not effective at dealing with uncertainties and unknown external disturbances. Several robust adaptive control strategies have been proposed for the flight control of the unmanned helicopters. They include a nonlinear adaptive output regulator and a robust stabilizer,11 an controller,12 a novel nonlinear backstepping controller,13 and so on. Although many works have focussed on flight control for helicopters, great challenges remain for the efficient flight control design of unmanned helicopters. In this article, the backstepping method14,15 is employed to develop flight control for a 3DOF model helicopter.
To better study flight control design for the unmanned helicopter, several experimental platforms for 3DOF model helicopters were developed by Quanser Consulting and Googol Technology for laboratory use.16 The 3DOF model helicopter, with degrees of pitch, the roll, and the yaw, is an effective device used to verify a variety of linear and nonlinear control methods for the development of a helicopter flight control method, and provide guidance for helicopter flight control study and design.17 Two DC motors attached to propellers are used to generate a driving force. Three optical encodings are used to measure three angles: pitch angle, roll angle and yaw angle. However, the three angular velocities are not available directly. Furthermore, external disturbance usually exists for the 3DOF model helicopter due to the unknown work environment. At the same time, an exact model can not be established for the 3DOF model helicopter which leads to modelling uncertainties. Thus, the unknown external disturbance, modelling uncertainties and unmeasured angular velocities should be considered in the control design for the 3DOF model helicopter.
Recently, a number of works have proposed motion control schemes for 3DOF model helicopters.18–25 These include: investigation of a robust linear quadratic regulator (LQR) attitude controller for aggressive maneuvers for the pitch and rolling channels of a 3DOF helicopter;18 a robust attitude controller for pitch and rolling channels;19 a nonlinear adaptive model following control based on parameter identification schemes;22 and a nonlinear model predictive control (NMPC) method to control the elevation and travel of a 3DOF helicopter.23 Each, however, is only designed for the pitch and roll channels, while the motion of the yaw channel also plays an important role in motion of helicopters. Subsequently, some researchers have paid attention to the motion of all three channels, including a new nonlinear asymptotic attitude tracking controller based on a nonlinear robust feedback and a neural network, without considering unknown external disturbances, for a 3DOF model helicopter and a hierarchical controller that achieves attitude tracking control for three channels.24,25. Although these models obtain good performance, constraints on voltages within the motors and attitude angles were ignored in the designed control schemes.
Various works have addressed the input and output constraint in control systems, covering various systems.26–42 A dynamic surface control (DSC) scheme has been proposed for a class of uncertain strict-feedback nonlinear systems in the presence of input saturation and unknown external disturbance.24 Neural adaptive control methods have been presented for a class of nonlinear systems with actuator saturation.25 An adaptive tracking control has been proposed for a class of uncertain MIMO nonlinear systems with non-symmetric input constraints.27 A robust tracking control scheme based on the recurrent wavelet neural network disturbance observer (RWNNDO) and the backstepping technique has been developed for a class of uncertain MIMO nonlinear systems with input saturation and unknown external disturbance.28 An adaptive fuzzy output feedback control has been investigated for a class of uncertain stochastic nonlinear systems with input saturation.29 Adaptive dynamic surface control was discussed for a near space vehicle (NSV) with input saturation using a disturbance observer.31 However, such robust control schemes should be further designed for the 3DOF model helicopter with input and output constraints.
The 3-DOF model helicopter platform used in this article is made by Googol Technology Ltd., as shown in Figure 1. The whole system, which is a MIMO under-actuated nonlinear system with unknown external disturbance and modelling uncertainties, is divided into two subsystems. One is the yaw channel, and the other is the pitch and rolling channels. The yaw channel chooses the roll angle as the virtual input. Due to the restraint of the rolling motion, the virtual input for the yaw channel cannot be changed on a large scale; that is, the attitude tracking control for the yaw channel is considered as an attitude tracking control with input constraint. The voltages of the two DC motors are considered as the input of the second subsystem. The attitude tracking control for the second subsystem is considered a control problem with input and output constraints.
3DOF model helicopter made by Googol Technology Ltd.
Inspired by the above discussion, a backstepping control scheme is developed for the motion control of a 3DOF model helicopter with unknown external disturbances, modelling uncertainties and input and output saturation. Furthermore, the closed-loop system stability is proved by using the linear matrix inequality (LMI)43–45 and Lyapunov method.
The remainder of this article is organized as follows. The model of the 3DOF model helicopter and an elaborate formulation of the control task under consideration are given in the ‘Problem formulation’ section. Next we outline the design procedure of an augmented state observer and the backstepping control scheme. Next, the feasibility of the proposed control approach is demonstrated by means of simulation results. Finally, we end with conclusions.
Problem formulation
The 3DOF model helicopter has three outputs: the pitch angle θ, the roll angle φ and the yaw angle ϕ. The 3DOF model helicopter consists of two motors, a long arm, a helicopter frame, a counterweight and a base. The two motors, which are applied with voltages and respectively, are attached at the two ends of the helicopter frame. Due to the mechanical restraint, the two outputs, pitch angle and roll angle are constrained. The position of the roll angle can result in the moment of the yaw axis.25
The attitude nonlinear dynamical model of the 3DOF model helicopter can be described as46,47
Defining , (1) can be rewritten as
Remark 1. After designing a controller for the motion control of the 3DOF model helicopter, the control inputs are obtained. Then, the voltages of the 3DOF model helicopter are obtained as
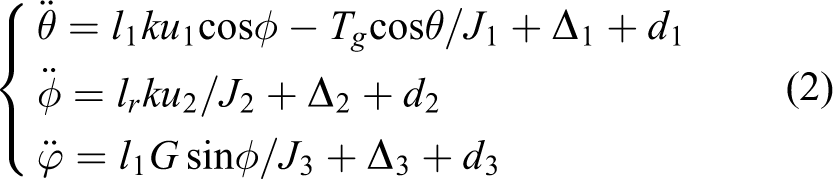
All notations employed in above analysis are given in Table 1. Equation (2) is an under-actuated system with two inputs: u1 and u2, and three outputs: θ, φ and ϕ. The motion of the yaw axis results from the motion of the rolling axis. It is difficult to design a controller to obtain good tracking performance of the three angles. In this article, the whole system is divided into two subsystems. One is the yaw channel as shown in (4), the virtual input of which is considered as the roll angle. The other comprises the pitch and rolling channels as shown in (5).
Nomenclature.
Notation (units)
Description
Distance between pitch axis and the rotors
Distance between rolling axis and the rotors
Mass of the counterweight
Equivalent mass of the two propellers
Force required to maintain the helicopter in flight
Force produced by one of the two motors
Force produced by the other motor
Effective moment from the pitch axis
k
Propeller force-thrust constant
Moment of inertia of pitch axis
Moment of inertia of rolling axis
Moment of inertia of travel axis
d1
External disturbance on the pitch axis
d2
External disturbance on the roll axis
d3
External disturbance on the travel axis
Δ1
Uncertainties of the pitch axis
Δ2
Uncertainties of the roll axis
Δ3
Uncertainties of the travel axis
Define which are composite disturbances. Equations (4) and (5) can be written as
Before the design of the control scheme, we give the needed assumptions and lemmas as follows:
Assumption 1. The composite disturbance satisfies
where are unknown positive constants.
Assumption 2. The roll angle φ is among due to the mechanical limitation. Without loss of generality, it is assumed that , where is a positive constant and satisfies .46
Lemma 1. For bounded initial conditions, if there exists a continuous and positive definite Lyapunov function satisfying , such that , where are class functions and , then the solution is uniformly bounded.27
For subsystem 1, defining , (6) can be rewritten as
where .
The virtual input of the yaw channel is expressed as
where is the boundary of the virtual input , determined by the constraint of φ, which can be obtained by the real flight task, and v is the designed control input.
To efficiently tackle saturation in the backstepping control scheme, it is approximated by the following smooth function35:
The difference between and is
Since the bounded property of the function and the function, the difference is bounded which satisfies the following condition:35
where ρ0 is a known positive constant when the boundary is determined.
Remark 2. To tackle the control input saturation of the yaw channel, the saturation function is approximated by the function in the backstepping control scheme design. To meet the controllable requirement, the difference between the designed control input and the actual control input should be bounded.
Considering the saturation characteristic, the uncertain nonlinear system (9) can be written as
Define , which is the composite disturbance. Then, the equation (14) can be written as
The function is monotonic when . The roll angle is in one-to-one correspondence with and . The constraint of can be obtained based on the constraint of . The desired tracking roll angle can be obtained by
For a practical system, the time derivation of is bounded when the actuator is determined.41 Based on Assumption 1, it is obvious that the time derivation of equivalent disturbance is bounded. We can obtain that
where ς is a unknown positive constant.
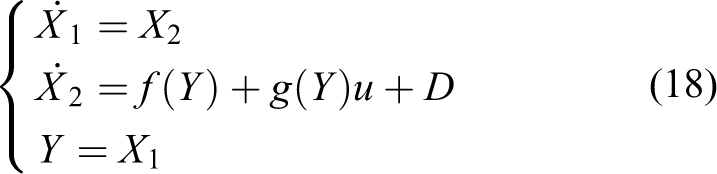
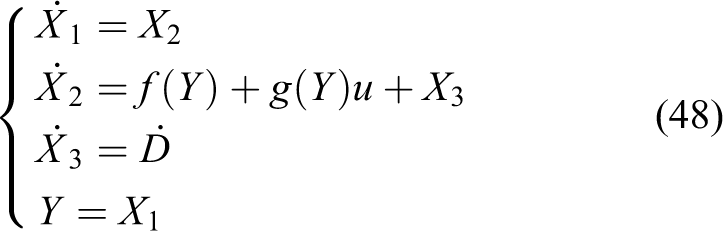
For subsystem 2, invoking (5), defining , we have the state space form as
where , is the control input of the system, , , .
Remark 3. Due to the mechanical limitation, the roll angle φ is among . The inverse of exists.
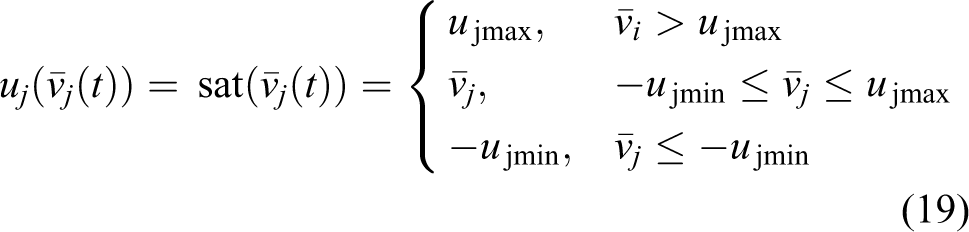
Due to the input constraint, one has the actual input as
where are the boundary of the control input .
Assumption 3. For the MIMO nonlinear system (18), the differences between real inputs and control inputs are bounded with .
Assumption 4. The desired pitch angle and roll angle are bounded, which satisfy .
Lemma 2. For given system matrix , we can obtain the equivalent conditions as
Based on the Assumption 1, it’s well known that D satisfies
where δ is a unknown positive constant.
The roll angle φ is considered as the virtual control input of the yaw channel. Because of the constraint of pitch angle, roll angle and voltages of motors, it’s necessary to take consideration of the input constraint for subsystem 1 and input and output constraint for subsystem 2. In this article, the pitch angle θ, the rolling angle φ and the yaw angle ϕ are the outputs. The control objective is to design an augmented state observer based backstepping control scheme for two subsystems to ensure the attitude angles to track the desired with unknown external disturbances, modelling uncertainties, and input and output constraints, and φ to track the virtual control input of the yaw channel with the unknown external disturbances, modelling uncertainties and input constraint.
Remark 4. Throughout this article, , denotes the l2 norm, denotes the minimum of the , and and denote the smallest and largest eigenvalues of a square matrix , respectively. represents the natural logarithm of .
Control scheme design
In this section, observer based backstepping control schemes are designed for the subsystem 1 and subsystem 2, respectively. Figure 2 shows the block diagram of the control scheme. An augmented state observer is employed to estimate the unknown composite disturbance and unknown states. Two backstepping controllers are designed to deal with the motion control for subsystem 1 with input constraint and subsystem 2 with input and output constraints.
The control scheme for the 3DOF model helicopter.
Control scheme design for subsystem 1
In this section, an augmented state observer based backstepping control scheme is designed to make the yaw angle track the desired one.49 The control input for the yaw channel represents the desired roll angle.
Augmented state observer design for subsystem 1
In this section, an augmented state observer is designed for the yaw channel to estimate the unmeasured states and the unknown composite disturbance.
Defining , (15) can be rewritten as
Define . Then, (22) can be expressed as
where .
The augmented state observer is given as
where to be designed.
Comparing (23) with (24), we have the time derivation of estimation error as
where is the estimation error of augmented state observer.
Based on (25), we can choose a suitable vector Ξ to make a Hurwitz matrix. Then, for any given positive matrix , there always exists a positive symmetric matrix to make
Choose the Lyapunov function for the augmented state observer as
The time derivation of (27) is given by
where , .
Based on Lemma 1 and (28), choosing a suitable matrix to make
then the state estimation errors can be converged into a small neighbourhood.
Based on Lemma 2, (30) can be rewritten in the LMI form as
where .
Backstepping control scheme with input constraint for subsystem 1
The backstepping control scheme based on the estimate values for the unmeasured states and unknown composite disturbance for the yaw channel with input constraint is developed in this section.
Step 1: Defining desired yaw angle , we have the tracking error as
The time derivation of (33) is given by
Define
where is the virtual control which will be given later.
Consider the following Lyapunov function candidate:
The virtual control is given as follows
where ϱ1 is a parameter to be designed.
The time derivation of (36) is given by
Step 2: The time derivation of (35) is
Consider the following Lyapunov function candidate:
The time derivation of (40) is given by
The control law is designed as
where is a parameter to be designed. The desired roll angle can be obtained from (11) and (16).
Substituting (42) into (41), one has
Choose the whole Lyapunov function as
The time derivation of (44) is given by
where
Based on Lemma 1, we can choose suitable parameters to make
then all signals for the whole system are semiglobally uniformly bounded when .
Based on (31) and (46), when choosing suitable parameters and adjustable parameters to meet (46), condition (31) is satisfied.
On the other hand, is equal to
where .
By solving (47), we can obtained the observer gain as . Choosing suitable control parameters to meet the rest condition in (46), the whole states in subsystem 1 are stable.
Control scheme design for subsystem 2
In this section, an augmented state observer based backstepping control scheme is designed in detail to deal with the motion control for the pitch and rolling channels with input and output constraints of the 3DOF model helicopter.
Augmented state observer design for subsystem 2
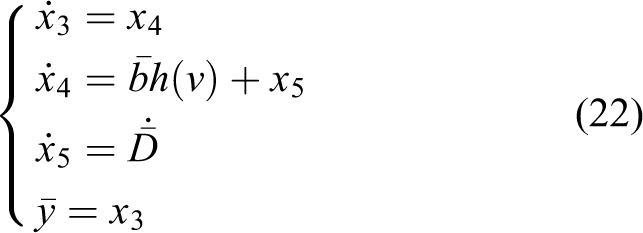
Considering the composite disturbance as an augmented state of the system, an augmented state observer is applied to estimate the unknown angular velocities and composite disturbance.
Defining , we have
Choosing the state vector as , from (48), one has
where .
The augmented state observer is given as
where is a designed parameter and .
Comparing (49) with (50), we have the state estimation error equation as
where is the state estimation error.
From (51), we can choose a suitable matrix L to make a Hurwitz matrix. Then, for any given positive matrix Q, there will always be a positive symmetric matrix P such that
Choose the Lyapunov function for the augmented state observer as
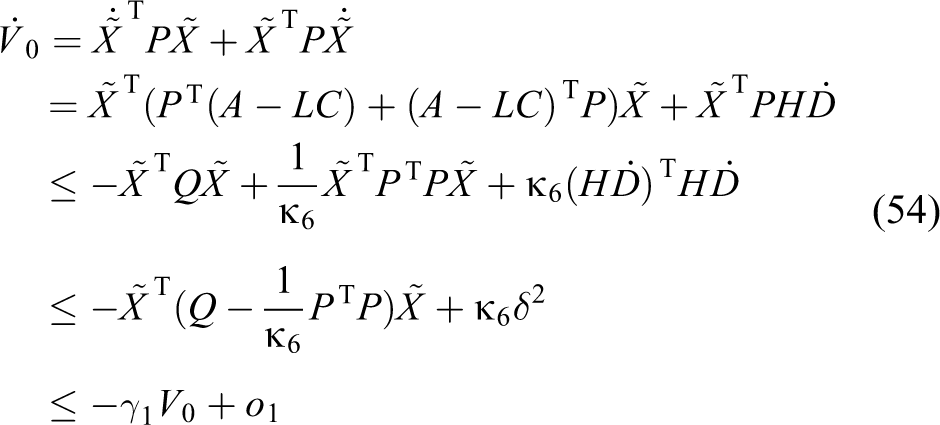
The time derivation of (53) is given by
where is an adjustable parameter, , .
Based on Lemma 1 and (54), choosing a suitable matrix and κ6 to make
then the state estimation errors is uniformly bounded.
Similarly, (55) is equivalent to
where.
Backstepping control scheme design for subsystem 2
A barrier Lyapunov function (BLF) is applied so as to deal with the output constraint. Before the design of control scheme, the definition of a BLF is given as follow:
Definition 3. A BLF is a scalar function , defined with respect to the system on an open region Ω containing the origin, that is continuous, positive definite, has continuous first-order partial derivatives at every point of Ω, has the property as x approaches the boundary of Ω and satisfies along the solution of for and some positive constant b.50
Lemma 4. For any positive constant , let and be open sets. Consider the system
where is the state, and the function is piecewise continuous in t and locally Lipschitz in , uniformly in t, on . Suppose that there exist continuously differentiable and positive definite functions and , such that
with γ1 and γ2 as class functions. Let , and . If the inequality holds
in the set and are positive constants, then w remains bounded and .51
The desired roll angle is obtained in the above section, . In this section, a backstepping control scheme based on the estimated values is applied for the pitch and rolling angles to track the desired angles .
Define
where is a virtual control function which will be given later and is an auxiliary variable in an auxiliary system used to deal with the input constraint. The auxiliary system is designed as
where is a parameter to be designed, .
To effectively deal with the output constraint, choose the asymmetric BLF as
where is the boundary of Z1, , is the boundary of the attitude angles, and and are known constants.
Step 1: Invoking (49), the time derivation of (60) is
The derivation of (63) is given by
Due to
and
where are parameters to be designed.
Taking (66) and (67) into (65), one has
The virtual control input α is designed as
where is a diagonal matrix to be designed.
Invoking (69) into (68), we have
Step 2: Based on (50), the time derivation of (61) can be written as
The derivation of (69) is given by
where
Consider the following Lyapunov function candidate
The time derivation of (73) can be written as
We have following facts
and
where is a parameter to be designed.
Taking (75) and (76) into (74), we have
Design the control law as
where is a diagonal matrix to be designed.
Substituting (78) into (77), we have
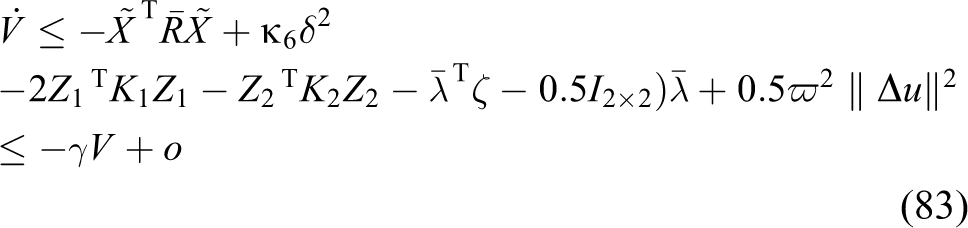
Choose the whole Lyapunov function for subsystem1 as
Based on Lemma 1 and (83), we can choose suitable parameters to make
then all signals of the subsystem 2 are semiglobally uniformly ultimately bounded.
Similarly, is equal to
where .
If the suitable parameters are chosen to meet the condition (85), then the condition (56) can be guaranteed. By solving (85), the observer parameters are obtained as . Then, we can choose other suitable parameters to meet the rest conditions in (84).
Choose the total Lyapunov function for the whole system as
The time derivation of (86) is given by
where .
Based on Lemma 4 and (87), the whole system of the 3DOF model helicopter can be semiglobally uniformly ultimately bounded. Then, , based on Assumption 4 and . Thus, the pitch angle and roll angle are restrained in the given range.
Simulation results
In this section, simulation results of the backstepping control strategy for the three channels of the 3DOF model helicopter with input and output constraints are given to illustrate the effectiveness of the developed control strategy.
The 3DOF model helicopter is given by (1) and its coefficients can be obtained from the guidance for the GHP2002 3DOF model helicopter. So as to avoid overturning during flight,22 the constraint of the roll angle can be chosen as . The constraint of can be set as . The initial value of the three angles are . The initial value of the three angular velocities are
The desired tracking angles are chosen as
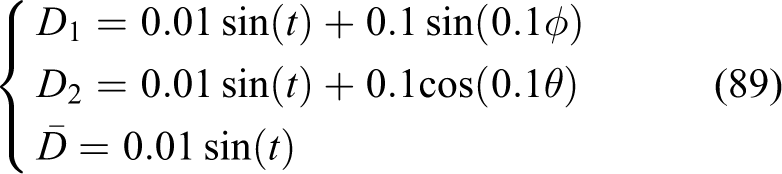
The desired roll angle is obtained by the yaw channel, and the equivalent disturbances are assumed to be
The limits of the pitch angle and roll angle are . If the given, the real attitude boundaries are . Then, the boundary of the errors are .
To proceed with the design of nonlinear disturbance observer-based backstepping scheme, all design parameters are chosen as shown in Table 2.
Control parameters.
Notion
parameter
Notion
parameter
Ξ
l1
ζ1
l2
ζ2
l3
ϱ1
K1
ϱ2
K2
The corresponding are
Under the proposed backstepping control scheme (24), (42), (49) and (74), simulation results are shown in Figures 3–15.
Output for the pitch channel.
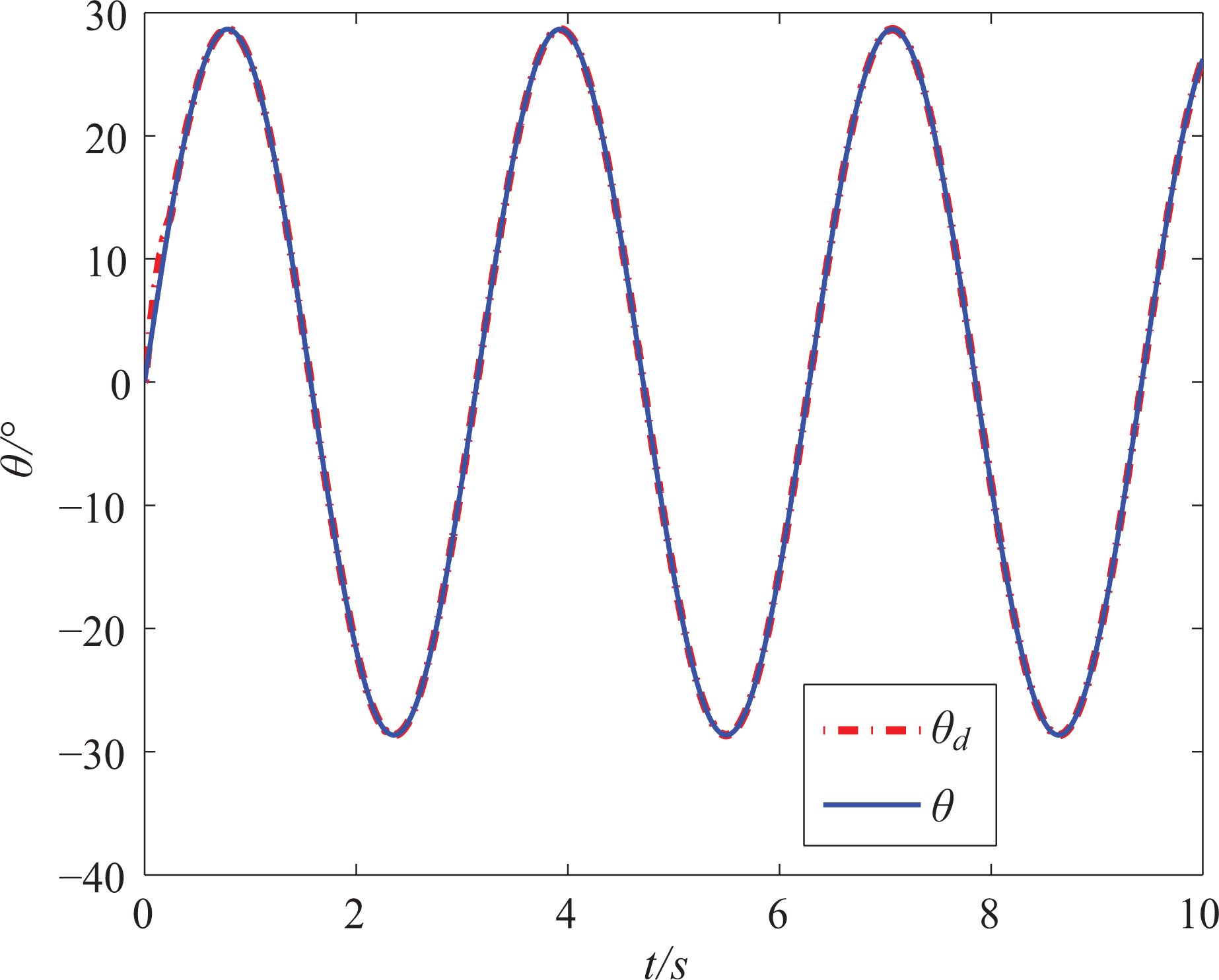
Output for the rolling channel.
Output for the yaw channel.
Output for the rolling channel.
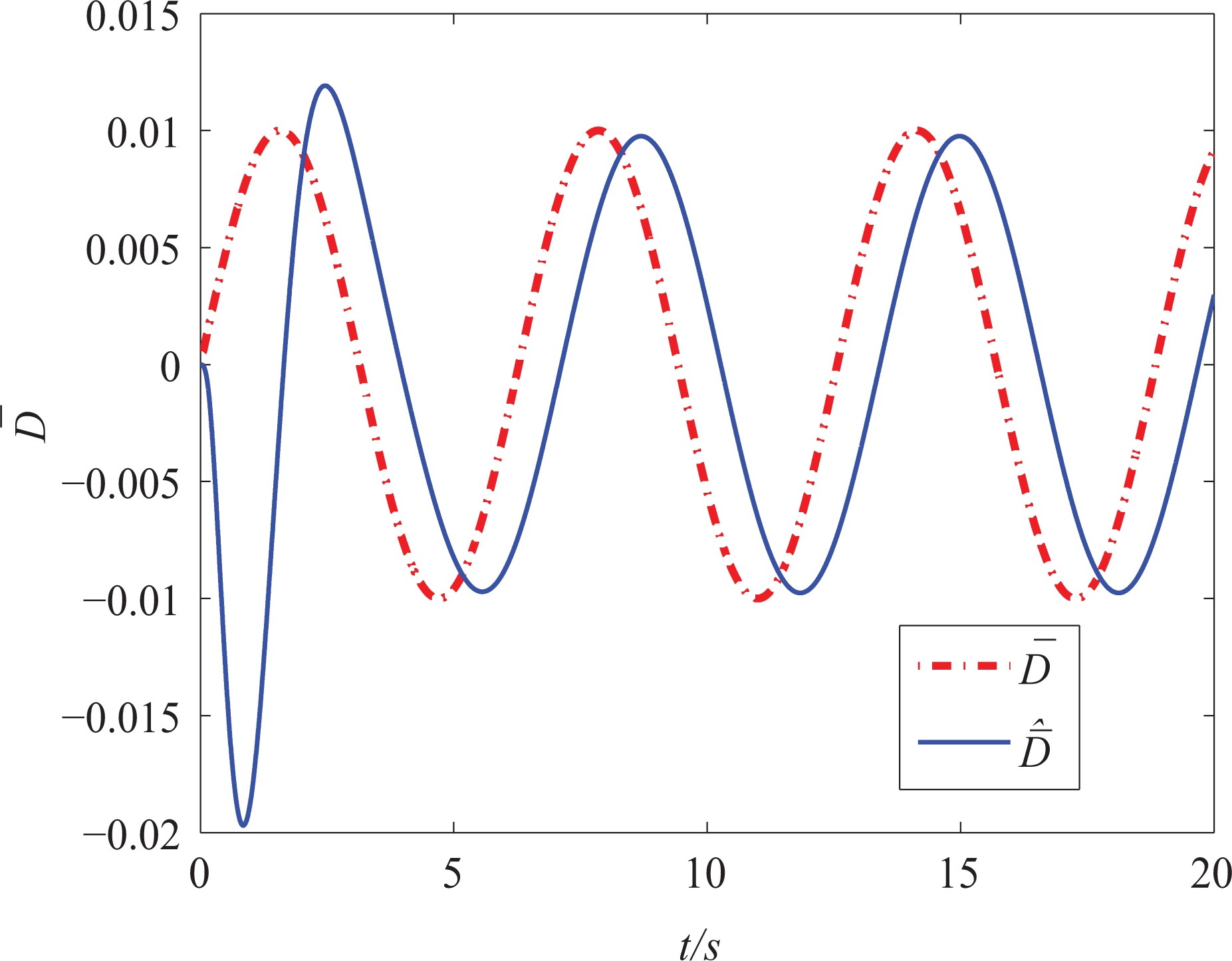
Estimation for composite disturbance on the pitch channel.
Estimation for composite disturbance on the rolling channel.
Estimation for composite disturbance on the yaw channel.
Estimation for pitch angle of the augmented state observer.
Estimation for roll angle of the augmented state observer.
Estimation for yaw angle of the augmented state observer.
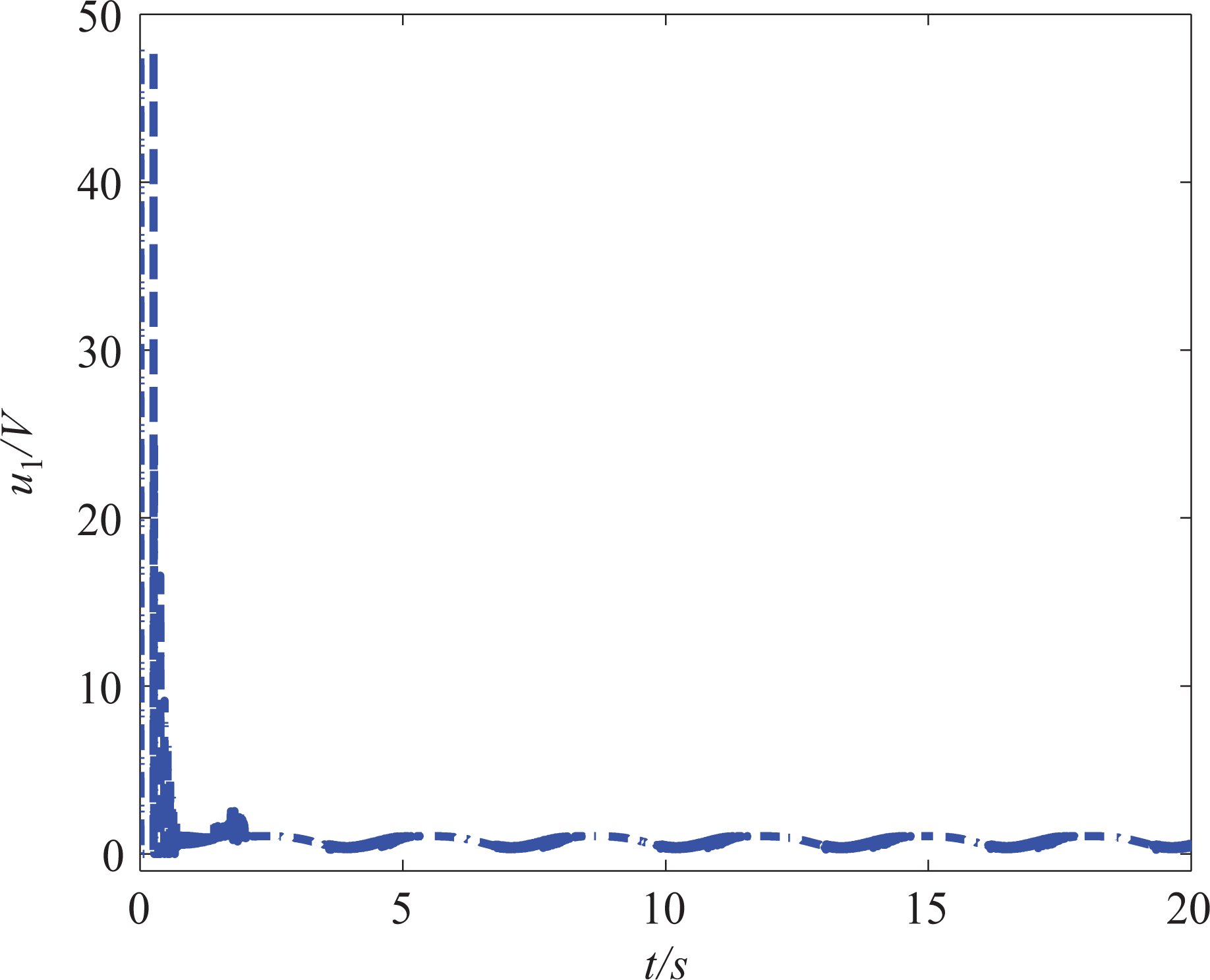
Control input u1.
Control input u2.
Tracking errors Z1.
Figures 3–15 show the three attitude angle’s output curves under the developed control scheme. It is obvious that the angles can effectively track the desired angles . One can see that the rolling angle tracks the reference generated by the tracking error of the yaw angle well. The control design for the yaw channel is effective at dealing with input constraint in Figure 6. v represents the input without taking the constraint of the roll angle into consideration, and is the control input for the yaw channel taking the constraint of roll angle into consideration as well as the desired tracking roll angle for the roll channel. is obtained from . It is obvious that the augmented state observer can effectively estimate the unknown external equivalent disturbance based on Figures 7–9. Figure 10–12 represent the estimation curves for the three attitude angles. One can see that the augmented state observer is adequate at estimating the unknown states. Figures 13–14 represent the control inputs. One can see that the control inputs are within the limits of the 3DOF model helicopter. Figure 15 shows the convergence of the tracking errors of the pitch and rolling channels. It is obvious that the designed control scheme is effective at dealing with the tracking control problems of the 3DOF model helicopter.
Based on Figures 3–15, we can see that the designed backstepping control scheme is valid for the attitude tracking control of the 3DOF model helicopter with uncertainties, unknown external disturbances and input and output constraints.
Conclusion
In this article, a backstepping control strategy has been developed for the 3DOF model helicopter. To design the backstepping control scheme, the under-actuated model of the 3DOF model helicopter has been divided into two subsystems. One is the yaw channel, with its virtual input considered to be the roll angle, and the other comprises the pitch and rolling channels. Both models of the two subsystems are nonlinear systems with modelling uncertainties and unknown external disturbance. The equivalent disturbance, including the unknown external disturbance and modelling uncertainties, is considered an augmented state. Augmented state observers, which are easily implemented using hard-ware, are applied to the two subsystems to estimate the unmeasurable states and the equivalent disturbance. A backstepping control scheme employing a BLF is developed to achieve tracking control performance for the pitch and rolling channel with constrained output. At the same time, the auxiliary systems are employed to deal with the input constraint. Simulation results verify that the developed control strategy is effective for the three attitude angles to track the desired angles.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This article was supported by the National Natural Science Foundation of China (grant number 61573184), the Specialized Research Fund for the Doctoral Program of Higher Education (grant number 20133218110013), the Fundamental Research Funds for the Central Universities (Grant No. NE2016101) and the 333 high-level personnel training project of Jiangsu Province (grant number BRA2015359).
References
1.
ChenMJiangB. Robust attitude control of near space vehicles with time-varying disturbances. Int J Control Automat Sys2013; 11(1): 182–187.
2.
PanZQZhangYKwongS. Efficient motion and disparity estimation optimization for low complexity multiview video coding. IEEE T Broadcast2015; 61(2): 166–176.
XiaZHWangXHSunXM. Steganalysis of LSB matching using differences between nonadjacent pixels. Multimed Tools Appl2016; 75(4): 1947–1962.
5.
XiaZHWangXHSunXM. Steganalysis of least significant bit matching using multi-order differences. Lect Notes Comput Sc2014; 7(8): 1283–1291.
6.
LiJLiXLYangB. Segmentation-based image copy–move forgery detection scheme. IEEE T Inf Foren Sec2015; 10(3): 507–518.
7.
ChenBJShuHZCoatrieuxG. Color image analysis by quaternion-type moments. J Math Imaging Vis2015; 51(1): 124–144
8.
ChenMRenBBWuQX. Anti-disturbance control of hypersonic flight vehicles with input saturation using disturbance observer. Sci China Ser F2015; 58(1): 1–13.
9.
ChenMWuQXJiangCS. Guaranteed transient performance based control with input saturation for near space vehicles. Sci China Ser F2014; 57(5): 1–12.
10.
KimHJShimDH. A flight control system for aerial robots: Algorithms and experiments. Control Eng Pract2003; 11(12): 1389–1400.
11.
CaiGChenBMDongX. Design and implementation of a robust and nonlinear flight control system for an unmanned helicopter. Mechatron2011; 21(5): 803–820.
12.
RaffoGVOrtegaMGRubioFR. An integral predictive nonlinear control structure for a quadrotor helicopter. Automatica2010; 46(1): 29–39.
13.
RaptisIAValavanisKPMorenoWA. A novel nonlinear backstepping controller design for helicopters using the rotation matrix. IEEE T Contr Sys T2011; 19(2): 465–473.
14.
FangYMHouSXFeiJT. Harmonic suppression of three-phase active power filter using backstepping approach. Int J Innov Comput I2015; 11(2): 497–507
15.
XingHLZhongXZLiJ. Linear extended state observer based back-stepping control for uncertain SISO nonlinear systems. Int J Innov Comput I2015; 11(4): 1411–1419
16.
ZhengBZhongYS. Robust attitude regulation of a 3-DOF helicopter benchmark: Theory and experiment. IEEE T Industrial Electronic2011; 58(2): 660–670.
17.
ChenMShiP. Adaptive CCL neural fault-tolerant control of a 3-DOF model helicopter system. IEEE T Syst Man Cy A2016; 46(2): 260–270.
18.
LiuHYuYLuG. Robust LQR attitude control of 3DOF helicopter. Proceedings of the 29th Chinese control conference, Beijing, China, 29–31 July 2010, pp.529–534. New Jersey, USA: IEEE.
19.
WangXFLuGZhongYS. Robust attitude control of a laboratory helicopter. Robot Auton Syst2013; 61(12): 1247–1257.
20.
de LozaFARosHRosalesA. Robust regulation for a 3-DOF helicopter via sliding-mode observation and identification. J Frankl Inst2012; 349(2): 700–718.
21.
YuYSunCY. Robust attitude decentralized tracking control for a 3-DOF helicopter with unknown input time-delay. Proceedings of 25th chinese control and decision conference, Guiyang, China, 25–27 May 2013, pp.173–177. New Jersey, USA: IEEE.
22.
IshitobiMNishiMNakasakiK. Nonlinear adaptive model following control for a 3-DOF tandem-rotor. Control Eng Pract2010; 18(8): 936–943.
23.
ZhaiYJNounouMNounouH. Model predictive control of a 3-DOF helicopter system using successive linearization. Int J Eng Sci Technol2010; 2(10): 9–19.
24.
LiuXXianBGuoJC. A new nonlinear asymptotic attitude tracking control of an underactuated 3-degree-of-freedom helicopter using neural network feedforward term. J Contr Theory Appl2013; 11(3): 428–435.
25.
LiuHLiuJXZhongYS. Robust hierarchical control of a laboratory helicopter. J Frankl Inst2014; 351(1): 259–276.
26.
ChenMShiPLimCC. Robust constrained control for MIMO nonlinear systems based on disturbance observer. IEEE T Automat Contr2015; 60(12): 3281–3286.
27.
ChenMGeSSRenBB. Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints. Automatica2011; 47(3): 452–465.
28.
ChenMZhouYLGuoWW. Robust tracking control for uncertain MIMO nonlinear systems with input saturation using RWNNDO. Neurocomput2014; 144(1): 436–447.
29.
SuiSLiYMTongSC. Adaptive fuzzy control design and applications of uncertain stochastic nonlinear systems with input saturation. Neurocomput2015; 156(1): 42–51.
30.
ChenMGeSS. Adaptive neural output feedback control of uncertain nonlinear systems with unknown hysteresis using disturbance observer. IEEE T Ind Electron2015; 26(12): 7706–7716.
31.
ChenMYuJ. Adaptive dynamic surface control of NSVs with input saturation using a disturbance observer. Chinese J Aeronaut2015; 28(3): 853–864.
32.
ChenMGeSSHowVE. Robust adaptive neural network control for a class of uncertain MIMO nonlinear systems with input nonlinearities. IEEE T Neural Networ2010; 21(5): 796–812.
33.
KieferTGraichenKKugiA. Trajectory tracking of a 3DOF laboratory helicopter under input and state constraint. IEEE T Contr Sys T2010; 18(4): 944–952.
34.
ChenMJiangBCuiRX. Trajectory tracking of a 3DOF laboratory helicopter under input and state constraint. Int J Robust Nonlin2015; 26(3): 542–564.
35.
ChenMGeSSRenBB. Robust attitude control of helicopters with actuator dynamics using neural networks. IET Contr Theory Appl2009; 4(2): 2837–2854.
36.
WangHQChenBLiuXP. Adaptive neural tracking control for stochastic nonlinear strict-feedback systems with unknown input saturation. Inform Sciences2014; 269(1): 300–315.
37.
ChenMGeSS. Direct adaptive neural control for a class of uncertain non-affine nonlinear systems based on disturbance observer. IEEE T Cybernetics2014; 43(4): 1213–1225.
38.
WangHQChenBLiuXP. Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systems with input constraints. IEEE T Cybernetics2013; 43(6): 2093–2104.
39.
SuiSTongSCLiYM. Adaptive fuzzy backstepping output feedback tracking control of MIMO stochastic pure-feedback nonlinear systems with input saturation. Fuzzy Sets Syst2014; 254(1): 26–46.
40.
LiYMTongSCLiTS. Adaptive fuzzy output-feedback control for output constrained nonlinear systems in the presence of input saturation. Fuzzy Sets Syst2014; 248(1): 138–155.
41.
ChenMTaoGJiangB. Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE T Neural Networ Learning Sys2015; 26(9): 2086–2097.
42.
GaoSGDongHRNingB. Neural adaptive control for uncertain nonlinear system with input saturation: State transformation based output feedback. Neurocomput2015; 159(1): 117–125.
43.
OugliAETidhafB. Optimal type-2 fuzzy adaptive control for a class of uncertain nonlinear systems using an LMI approach. Int J Innov Comput I2015; 11(3): 851–863
44.
ShiPSuXLiF. Dissipativity-based filtering for fuzzy switched systems with stochastic perturbation. IEEE T Automat Contr2016; 61(6): 1694–1699
45.
SuXShiPWuL. Fault detection filtering for nonlinear switched stochastic systems. IEEE T Automat Contr2016; 61(5): 1310–1315
46.
AndrievskyBPeauclleDFradkovAL. Adaptive control of 3DOF motion for LAAS helicopter benchmark: Design and experiments. In: Proceedings of the American control conference, New York City, USA, 11–13 July 2007, pp.3312–3317. New Jersey, USA: IEEE.
47.
LiuHLuGZhongYS. Experimental results on robust tracking control for a lab helicopter under wind disturbance. In: Proceedings of the 31st Chinese control conference, Hefei, China, 25–27 July 2012, pp.2737–2742. New Jersey, USA: IEEE.
48.
LienCH. Robust observer-based control of systems with state perturbations via LMI approach. IEEE T Automat Contr2004; 49(8): 1365–1370.
49.
SuXWuLShiP. A novel approach to output feedback control of fuzzy stochastic systems. Automatica2014; 50(12): 3268–3275.
50.
TeeKPGeSSTayEH. Barrier Lyapunov function for the control of output-constrained nonlinear systems. Automatica45:918–927, 2009.
51.
RenBBGeSSTeeKP. Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE T Neural Networ2010; 21(8): 1339–1345.