
Abstract
In this article, we investigate the problem of finite-time trajectory tracking control for a quadrotor aircraft with unknown external disturbances. To improve convergence rate and disturbance rejection performance, a new composite controller is proposed by integrating finite-time control design and disturbance estimation attenuation technique. Explicit Lyapunov function is given to ensure the finite-time stability of the closed-loop control system. Numerical simulations also show the effectiveness of the proposed method.
Keywords
Introduction
In recent years, the small unmanned aerial vehicle (UAV) is drawing an increasing interest due to the large demand in the civil and military fields. 1 –3 Quadrotor aircraft is one of the most important vehicles in the UAVs for its simple structure, low cost, and the feature of vertical takeoff and landing. 4,5 Because of the powerful thrust generated by the four rotors, quadrotor aircraft also performs stronger maneuver ability to achieve various flight tasks through individual vehicle and multiple vehicles team, for example, air surveillance, search, rescue, sensor networks, delivery of small goods, and pesticide spraying. 6 –8 From the viewpoint of system control, quadrotor aircraft is a typical underactuated system which has nonlinear, coupling, multiple input–multiple output, how to design controller and analysis stability still is a challenging problem.
In the literature, various effective nonlinear control methods have been adopted to develop high-performance controller to meet the increasing demands on the quadrotor aircraft, such as backstepping control, 9 adaptive control, 10,11 sliding mode control, 12 –14 robust control, 15,16 and fuzzy control. 17 In these works, the double-loop control strategy is a common approach to deal with the complex dynamics of quadrotor aircraft, that is to say, the system model of quadrotor aircraft is divided into two control loop, the outer-loop is the position subsystem and the inter-loop is the attitude subsystem. To ensure the feasibility of the double-loop control, an essential requirement is that the convergence rate of the inter-loop is faster than the outer-loop. Therefore, the problem of the attitude control has also been studied by a large number of researchers, some attitude control algorithms were presented in the literature 18 –22 . However, most of the existing control algorithms belong to the field of the smooth control, which only ensures that the closed-loop system is asymptotically stable, that is, the settling time of system states that converge to equilibrium point is infinite time.
To improve convergence rate, a novel nonlinear control method named finite-time control has been developed in the study by Bhat and Bernstein 23 and attracted the attention of many researchers. 24 –27 The main feature of finite-time control lies in that the system state converges to the equilibrium point in finite time. Based on this, the problem of finite-time hovering control for a quadrotor aircraft was studied by Zhu et al. 28 The attitude control algorithm was given using finite-time control technology. 29,30 Besides, the external disturbance is inevitable in the flight process of a quadrotor aircraft, gust wind, and so on. Through theoretical analysis and experimental verification, 23,31,32 it is shown that finite-time control has better anti-disturbance ability.
The finite-time control method with the above advantages is suitable for the control of quadrotor aircraft. A finite-time controller with disturbance observer is designed for a quadrotor aircraft system. Noted that this work 33 only achieved finite-time control of a quadrotor aircraft system without external disturbance. Different from most existing results, 28,33 this article studies the problem of finite-time control for quadrotor aircraft with external disturbances. The main difficulty is to achieve finite-time stabilization, meanwhile the external disturbance is estimated and feedforward compensated. Based on homogeneous systems theory, the finite-time position and attitude controllers are presented to improve the system performance, and it can also simplify the design process of the controller. Meanwhile, considering the external disturbance in position subsystem and attitude subsystem, two finite-time disturbance observers are designed, then the external disturbance can be estimated in a finite time. Finally, by combing the finite-time disturbance observers, a finite-time control strategy with disturbance observer is proposed, whose validity is proved through Lyapunov theory and numerical simulations.
Preliminaries
Basic description of quadrotor system
As shown in the literature,
3,4
the construction of quadrotor aircraft system is given in Figure 1, which consists of a frame with cross structure, four propellers, and four motors. In general, two transformation coordinates are introduced to describe the motion of quadrotor aircraft in three-dimensional space. One is the inertial coordinate

The construction of quadrotor aircraft.
Dynamics model of quadrotor aircraft
Based on the difference in position control and attitude control, the dynamics model of quadrotor aircraft is viewed as two control subsystems, one is the position dynamical model and the other is the attitude dynamical model.
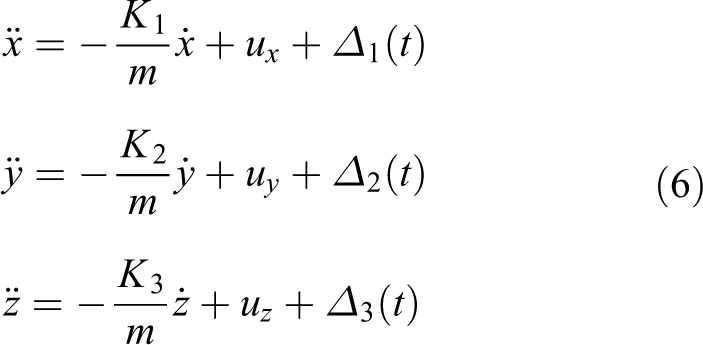
Position part
According to the literature, 5,12 the model for the position part of quadrotor aircraft is obtained as follows



where
Attitude part
From the literature, 5,12 it follows from the description method of Euler angle that the model for the attitude part of quadrotor aircraft is given by
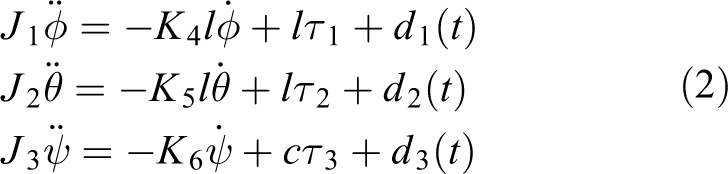
where
Remark 1
Note that in the quadrotor aircraft model (1)–(2), the control inputs are the total thrust T and the attitude control torque
Control objective
For the quadrotor aircraft system in this article, the control objective is to develop a finite-time trajectory tracking control law
Assumption 1
Assumed that the reference position trajectory is denoted as
Assumption 2
Assumed that the external disturbances
Relevant definitions and lemmas
Definition 1
Consider the following nonlinear system 23

where
Definition 2
A class nonlinear function is defined as
Definition 3
For the system (3) and any
Lemma 1
For the following system 34 :

where
Main results
The main idea of the controller design is based on backstepping approach. To be specific, the detailed procedure can be viewed as two steps.
Step 1: For the position control subsystem, by treating the attitude
Step 2: For the attitude control subsystem, the desired attitude is generated by previous position controller, then a tracking control law
Based on the separation principle, the finite-time observer is designed independently to compensate the external disturbances in the position subsystem or attitude subsystem.
Design of position controller
For the sake of simple expression, define



under which the position equation of system (1) is rewritten as
Lemma 2
For quadrotor’s position model (6) without the external disturbance, that is,

where
Proof
Because of the stability proofs for the three position components are similar, without loss of generality, we will only give the proof about the x-axis.
Let

In the sequel, it is proved that the closed-loop system (8) is globally finite-time stable. The entire process is based on Lemma 1, which is divided into two parts, that is, global asymptotical stability and local finite-time stability.
Step 1: Proof of global asymptotical stability
In the first step, it will be proved that system (8) is globally asymptotically stable. We can choose the following Lyapunov function

whose derivative regarding for system (8) is

Clearly, it can be concluded from equation (10) that the error and its derivative always are zero when the derivative of Lyapunov function equals to zero, that is,
Step 2: Proof of local finite-time stability
In this step, it is proved that the system (8) is also locally finite-time stable based on homogeneous systems theory. The system (8) can be decomposed into the following form

with higher order term

by similar proof in step 1, Lyapunov function is chosen as

According to LaSalle’s invariant principle,
35
the system (12) is also globally asymptotically stable. Meanwhile, it follows from Definition 3 that the system (12) is homogeneous vector field whose degree is
Note that the higher order term

Using Lemma 1, it can be found that system (11) is locally finite-time stable. Actually, the system (8) is globally finite-time stable by combining the globally asymptotically stable in step 1 with the local finite-time stability in step 2.
In practice, the influence of external disturbance on quadrotor aircraft cannot be ignored. For the convenience of explanation, the following assumption is given according to Assumption 2.
Assumption 3
Supposed that there are two known positive constants M
1 and M
2, so that
Lemma 3
For the system (6) under Assumption 3, the disturbance observers are designed as

then the estimation disturbances

with
Proof
Similarly, without loss of generality, only the proof about the x-axis is given here. Define the error as

By Assumption 3, we have
Based on this, a finite-time controller with the compensation of external disturbance is given to achieve the position tracking control of quadrotor aircraft.
Theorem 1
For the quadrotor’s position model (6), if the control law is designed as
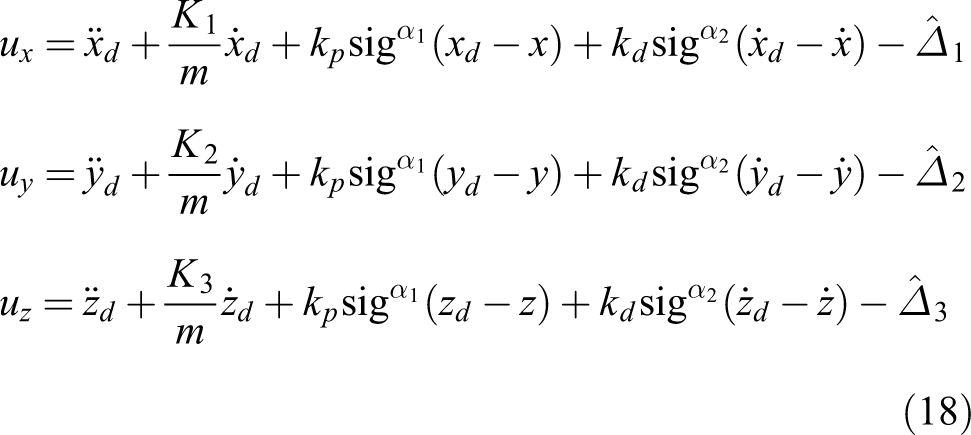
where
Proof
Because the disturbance observer (15) is finite-time stable, which means that there exists a finite time To
such that the observation equals to the real disturbance, that is,



By Lemma 2, the proof is straightforwardly obtained.
Design of attitude controller
In the previous section, the nonlinear dynamics involving attitude information



Due to the free variable
Lemma 4
For the quadrotor’s attitude model (2) without external disturbance, that is,



where
Proof
Similarly, without loss of generality, only the stability proof of roll angle φ is provided. Define the error as

Under the action of the proposed attitude controller (21), the closed-loop system is

It can be found that system (23) is similarly like the system (8). Therefore, it is easy to prove that the system (23) is globally finite-time stable by a similar process.
Considering the external disturbance, for the sake of simple writing, the attitude system (2) can be rewritten as


where
For the external interference in system (24), a disturbance estimation and compensation method is adopted. As that in the literature, 37 –,40 for external disturbances, the following assumptions are given.
Assumption 4
Assumed that there are known positive constants L
1, L
2 such that
Lemma 5
For the system (24) under Assumption 4, the states


will converge to the states

with
Proof
The proof process is the same as that of the position loop disturbance observer, that is, Lemma 3. The proof is straightforward.
Based on the accurate estimation of external disturbance, an attitude tracking control method based on the observer is proposed to realize finite-time attitude tracking control.
Theorem 2
For the quadrotor’s attitude model (2), if the control law is designed as



where
Proof
Because the disturbance observer (25) is finite-time stable, which means that there exists a finite time To
such that the observation equals to the real disturbance, that is,



With the result of Lemma 4, the proof is straightforward.
Remark 2
Note that the whole controller consists of position controller (18) and attitude controller (27). In addition, though the considered dynamics of roll, pitch, and yaw angles are linear and decoupled, the some results, such as in the study by Abdessameud and Tayebi, 4 the physical experiment is given to support the feasibility when the controller design is based on such simplified model.
Numerical simulations
To verify the previous theoretical results, some simulation cases are given in this section. Firstly, considering the existence of external disturbances, three kinds of control methods are employed, that is, Proportional-Differentiation (PD) control method, finite-time control method, and finite-time control method with disturbance observer.
Model parameters and controllers gains
The system’s parameter values of the quadrotor aircraft are given as follows: The mass of quadrotor aircraft is
The parameters of three different controllers are chosen as follows. For the proposed finite-time controller with observer, the control gains are
Simulation results
To verify the effectiveness of the proposed control law, some simulation parameters are set as follows: the reference position trajectory
To handle external interference, three different control laws are adopted, that is, the classical PD control, the general finite-time control, and the proposed finite-time control with disturbance observer. The comparison results for position and attitude tracking under three control laws are shown in Figures 2 and 3. The results show that the proposed control method has good robustness in dealing with external interference. Moreover, the disturbance observation
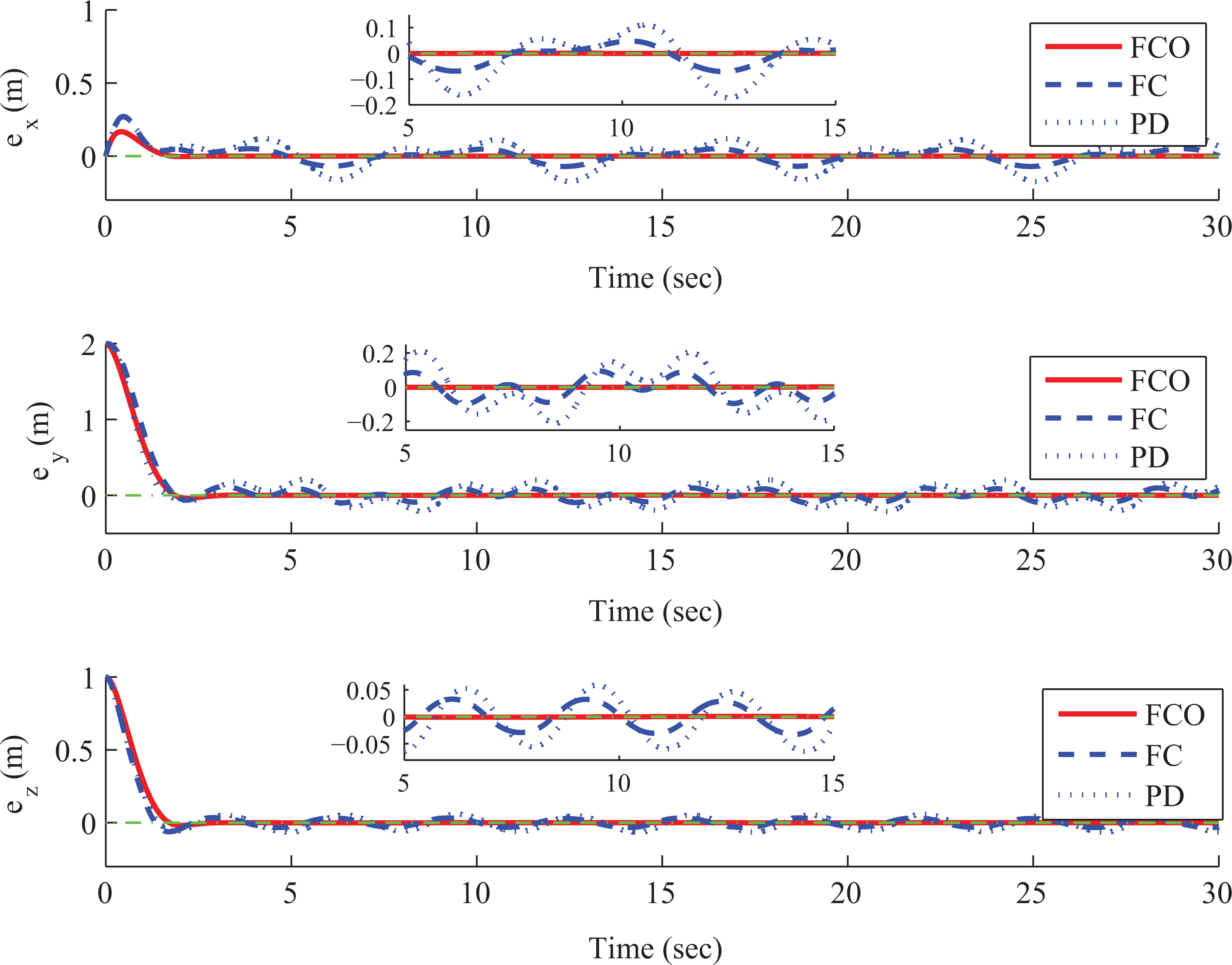
The curves of position tracking error.

The curves of attitude tracking error.

The curves of the position-loop’s disturbance observations

The curves of the attitude-loop’s disturbance observations
Conclusion
In this article, a finite-time control method with disturbance observer was proposed to realize the finite-time control of a quadrotor aircraft in the presence of the unknown external disturbances. According to the model characteristics of quadrotor aircraft, the controller design has two steps, that is, the design of finite-time position tracking controller and the design of finite-time attitude tracking controller. By combing the estimation of external disturbance, a finite-time control law with the compensation of disturbance was proposed. For position loop and attitude loop of aircraft with external disturbance, the corresponding controllers were designed to improve the performance. Through rigorous stability analysis and simulation results, the effectiveness of the controllers was verified. Future work includes conducting experimental research to verify the proposed control algorithm.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Open Fund of State Key Laboratory of Operation and Control of Renewable Energy and Storage Systems (China Electric Power Research Institute; no. EPRI4124-190856).