
Abstract
Recently, most of the existing mobile robot indoor positioning systems (IPSs) use infrared sensors, cameras, and other extra infrastructures. They usually suffer from high cost and special hardware implementation. In order to address the above problems, this article proposes a Wi-Fi-based indoor mobile robot positioning system and designs and develops a robot positioning platform based on the commercial Wi-Fi devices, such as Wi-Fi routers. Furthermore, a robust principal component analysis-based extreme learning machine algorithm is proposed to address the issue of noisy measurements in IPSs. Real-world robot indoor positioning experiments are extensively carried out and the results verify the effectiveness and superiority of the proposed system.
Keywords
Introduction
Recently, with the rapid advancements in artificial intelligence, mobile robots are widely applied in military and civilian applications. 1 In the study by Bezak et al., 2 the authors discuss the problem of object grasping by robot hands. In the study by Pivarčiová et al. and Bozek et al., 3,4 the authors introduced the research on robot trajectory control and achieved good results. The location information is extremely important for robot service and robot localization has been a key challenge task in the field of mobile robotics. Global positioning system (GPS) could provide satisfactory positioning accuracy for most outdoor location-based service. But it cannot supply enough position accuracy in indoor place as the GPS satellite signal is blocked in most of buildings. Many techniques have been developed for indoor robot localization systems. 5 Among these works, many techniques have been focused on the simultaneous localization and mapping (SLAM) problem. 6 However, the major drawback that limits them for extensiveness to be executed is that the hardware is costly. Nowadays, researchers have been working on using radio frequency (RF) signals from radio sources to determine the robots location in an indoor environment. 7,8 Unlike other wireless technologies, such as Bluetooth 9 and ultra-wideband (UWB), 7 which require the deployment of extra infrastructures, the existing commercial off-the-shelf Wi-Fi devices, such as routers, have been used extensively in malls and residential buildings, and every commercial device supports Wi-Fi. 10 As such, Wi-Fi should be the primary alternative for indoor mobile robot positioning.
Wi-Fi-based indoor location technologies include range-based and not-range. On the basis of the method of acquiring feature parameters, such as distance and angle between nodes, range-based location technology can be separated into four classes: time of arrival, 11 time difference on arrival, 12 angle of arrival 13 and received signal strength indicator (RSSI). 14 There are two broad categories for range-free positioning techniques: fingerprinting method and communication hop count-based algorithms. For target node and beacon node, we can calculate the minimum hops and hops between them to predict the location based on communication hops. 15 In many cases, DV-Hop is considered to be the classic algorithm among them. Several published results have shown that the fingerprinting-based positioning algorithms outperform other methods in terms of localization accuracy. 16,17 The fingerprinting localization procedure usually involves two phases: (1) offline calibration phases and (2) online matching phases. During the offline calibration phases, the reference position in the positioning area is sampled and the position and feature parameter database are established. For online localization phases, the gauged feature information are contrast with the dBase to gain the intelligence of the current location during positioning. Nevertheless, these localization algorithms are extremely labor-intensive and time-consuming during calibration phases. Furthermore, the RSS measurements are easily influenced by indoor environmental changes and result in low accuracy for fingerprinting-based localization.
In order to address both special hardware implementation and robustness issues with respect to environmental dynamics, we design a robot indoor location system based on robust principal component analysis-extreme learning machine (RPCA-ELM) using commercial off-the-shelf Wi-Fi devices in this article. In this article, the chief contributions are as shown below. We have designed and developed the real-time positioning system of indoor mobile robot, including a customized robot hardware platform and a control system installed on PC. A robust indoor localization algorithm (i.e. RPCA-ELM) is designed by combining the advantage of both ELM and robust PCA. Both theoretical analysis and extensive experiments are carried out and demonstrate the superiority of the proposed method. The designed system can provide high accuracy and robust to environmental changes. Its high real-time quality can satisfy the demand of extensive application in the field of industrial and civilian applications. The proposed system does not require the assistance of other sensors, which greatly reduces the potential implementation cost and is easy to install and maintain. It is necessary to point out that our target in this article is to devise a lower cost and higher accuracy system to locate a robot using Wi-Fi for aim to easy and amusement in houses and offices where position error of robot is not disaster, such as robot navigation in the museum or shopping mall and material conveying in automatic warehouses.
The rest of the article is organized as follows. The related work is briefly reviewed in the second section. The third section introduces the preliminaries for this article, including fingerprint-based positioning, backgrounds for ELM. The fourth section presents the proposed RPCA-ELM strategy. In the fifth section, our experimental test bed and data collection procedure are elaborated at first and then experimental results and performance evaluation of the proposed scheme are reported. We conclude this article in the sixth section.
Related work
In recent years, researchers have executed intensive study on indoor location technology. UWB, 7 RF, 8 Zigbee, 18,19 Bluetooth, 9 and other indoor positioning technologies have been proposed. However, these indoor positioning technologies need to make install the added device, which may have a negative impact on people’s lives. Wi-Fi-based indoor location was exposed to extensive concern, as it utilizes only the Wi-Fi equipment extensive being in indoor place and provides better accurate indoor location information in real time.
SLAM has been widely used in autonomous navigation and location of robots in many works. In order to locate and build maps in unfamiliar environments, they use a lot of sensors, such as lasers, cameras, and odometers. 6,20,21 The popularity of SLAM is related to the emergence of indoor applications for robots. 6 The advantages of these works are that the robot can be located in an strange place and the location precision is comparatively high by the work together operation of a variety of sensors. At present, the positioning accuracy of SLAM can reach the centimeter level. In addition, visual SLAM has made a significant contribution to the built of indoor maps, indicating that it is possible to operate robots in the absence of an ad hoc localization infrastructure. 22,23 However, although visual SLAM has some advantages, it has poor stability. Binocular vision SLAM is employed for solving the shortcoming of monocular vision SLAM, but the system is extremely high costing. Environmental factors such as light and line-of-sight occlusion are also a serious challenge for visual SLAM.
Many works were developed for fingerprint-based methods to achieve high-accuracy localization. In fingerprint recognition technology, each location of the fingerprint is interested and uses the nearest neighbor match to locate the mobile device. Miscellaneous techniques have been incorporated into the fingerprinting approach. For instance, the Bayesian inference is exploited in the study by Brunato and Battiti 24 to improve the localization accuracy. Some deterministic inference techniques such as the K nearest neighbor (KNN) inference have also been used to estimate locations of occupants. 16,25 Furthermore, other approaches adopt machine learning methods, including neural networks, 26 back-propagation (BP), 27 support vector machine for regression, 28 compressed sensing, 29 factor graphs, 30 kernel estimation, 31 –33 and so on. It is noteworthy that one of the machine learning algorithms, ELM, has attracted significant attention in recent years due to its fast learning and easy implementation. 34,35 In the study by Zou et al., 36 an RFID-based indoor positioning system (IPS) adopting the ELM has been reported to deliver a better performance in terms of both efficiency and localization accuracy. In addition, online sequential extreme learning machine (OS-ELM), which can adapt to various environmental dynamics by its online sequential learning ability, can provide higher localization accuracy consistently than traditional approaches. 37
Preliminaries
In this article, the indoor positioning technology we proposed is a fingerprint-based method. In addition, the proposed improved algorithm is based on ELM. Thus, in this section, we first introduce the processing of fingerprint localization and then describe the preliminaries on ELM.
Fingerprinting indoor positioning
As increasing with distance, the signal gradually attenuates and is greatly affected by the propagation environment. In addition, channels at different locations have different multipath characteristics. After refraction, reflection, and scattering, it generates a unique signal related to its transmission channel. For multipath features, this is called the fingerprint of the signal position. It includes a variety of signal characteristics, such as the most common signal-to-noise ratio and intensity. In this article, we use the acquired signal strength as fingerprint feature data. As shown in Figure 1, the fingerprint positioning method includes two stages of offline training and online location. In the figure, L indicates the position coordinate, and RSS represents the signal reception intensity data. In the offline/training stage, the system of fingerprint location mainly collects the signal features corresponding to the sampling point in the location area and constructs a fingerprint database composed of the sampling point coordinates and the corresponding receiving signal features. During positioning stage, the mobile robot transmits the collected real-time signal data to the server. In this article, we use a matching algorithm to detect the RSS fingerprints in the database. When it seeks out the matching RSS fingerprint, the position consistent to the RSS fingerprint in the position radio map is regard as the probable location of the current robot.
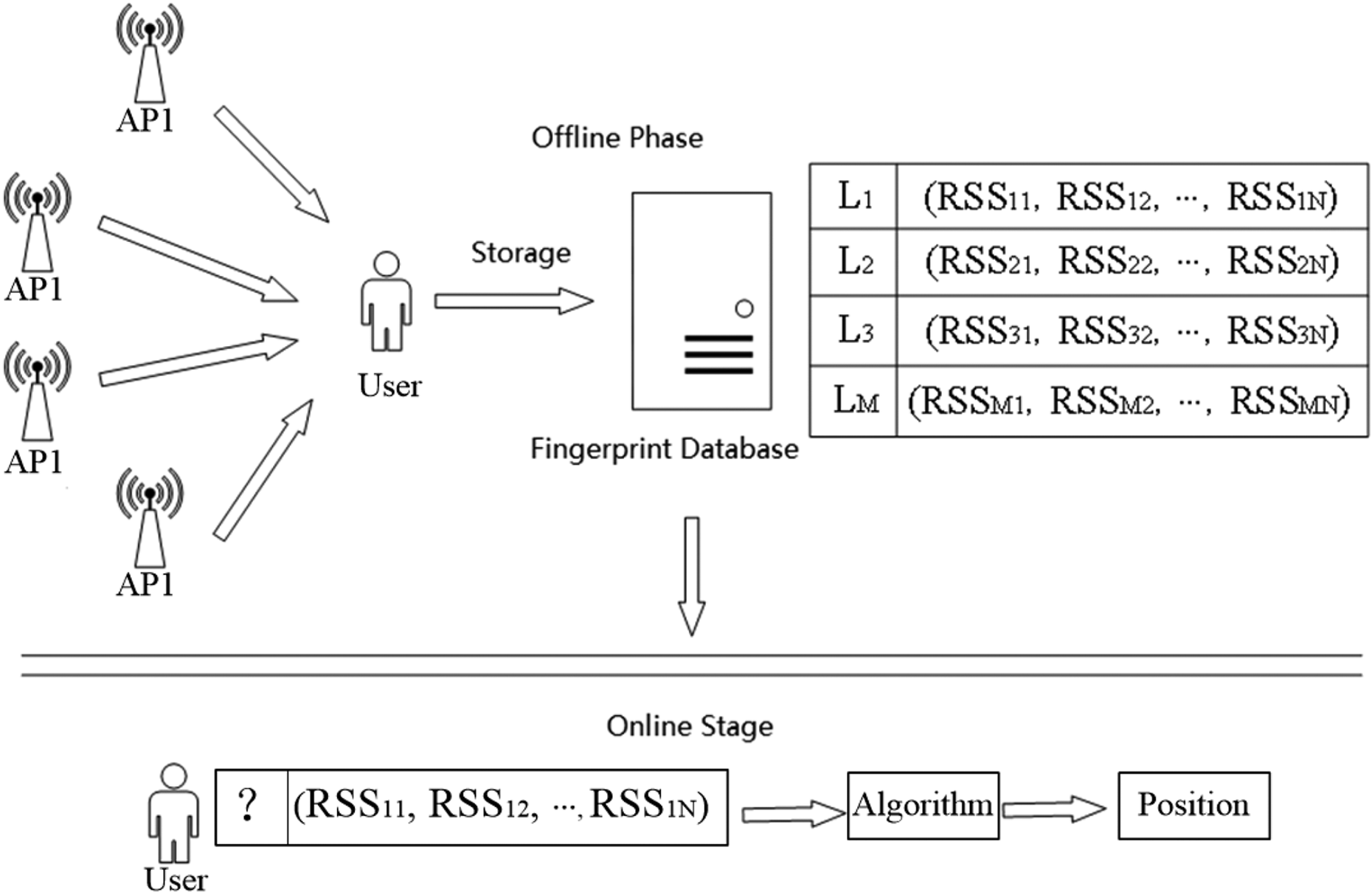
The process of fingerprint positioning.
Introduction to ELM
ELM is an algorithm proposed by Huang to solving single-hidden layer feed forward neural networks (SLFNs). 35 The traditional BP algorithm needs to set a lot of training parameters in the training process, which is easy to fall into the local optimum. ELM sets a lot of hidden layer nodes with a unique optimal solution, and input weights and offsets can also be initialized by random functions. On the premise of guaranteeing the learning accuracy. The traditional algorithm is much slower than this algorithm; in contrast, this algorithm is more suitable for robot location.
SLFN is the general model of feed forward network, and its training process is to approach the optimal training sample. The ELM algorithm is very fast and can solve the neural network with only a unitary hidden layer. As shown in Figure 2, it shows its network framework. Suppose there are M arbitrary independent samples

where
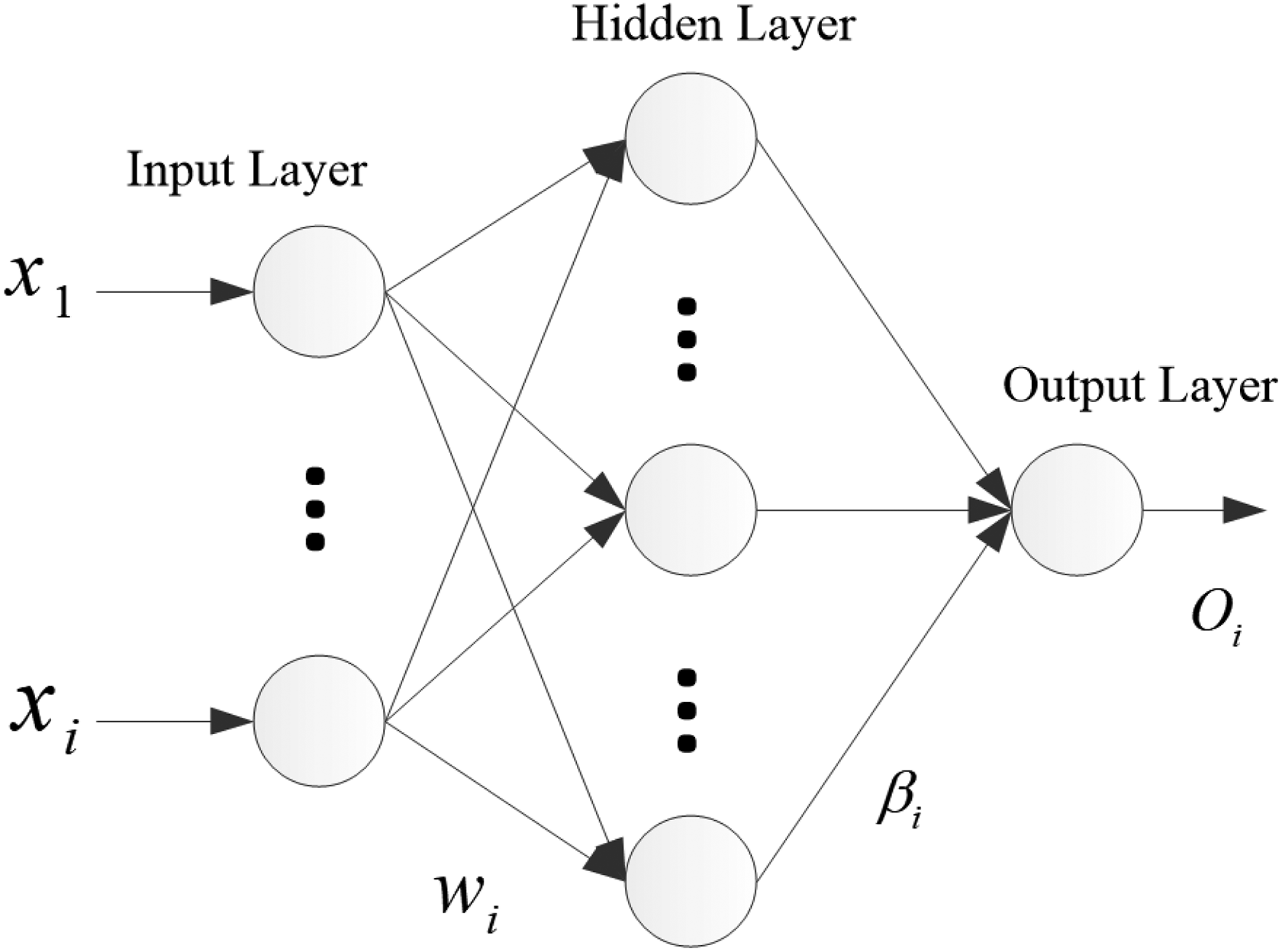
Structure of the SLFN. SLFN: single-hidden layer feed forward neural network.
The goal of SLFN learning is to approach the sample output with zero error, that is

where

The above equation can be abbreviated to the following matrix equation

where H denotes the hidden layer output:
In order to train the single-layer neural network to approach the sample output with zero error, it is necessary to find

Equation (5) is equivalent to minimizing loss functions, as shown in equation (6)

The ELM algorithm effectively solves the shortcomings of the single hidden layer neural network algorithm. In the ELM algorithm, it is not necessary to adjust the input weight
At the beginning of the algorithm, the weights

Accordingly,

where
Robot positioning based on robust PCA-ELM algorithm
In this section, we shall introduce the architecture of the proposed localization system and the proposed RPCA-ELM algorithm.
System configuration
The architecture and design of the system are briefly illustrated in this section. The structure of the special system is shown in Figure 3. The system consists of the server and the client. The server adopts Lenovo notebook computer (V480). The client is regulated interactively by a Linux system facility and an ARM microcontroller. In this article, we use wireless network (Wi-Fi) to communicate between the host and the lower computer. It has a very fast transfer speed and supports the IEEE802.11b standard and long effective range. In this article, the data interaction uses the TCP transport protocol, so when we are collecting data and actual tests, we can just use Wi-Fi.

System structure.
A real-time Web-based remote monitoring system is developed for the server. After being installed on the server, the ARM development board communicates with the server in real time to synchronously collect and send RSS data from various Wi-Fi routers (act as access points (APs)) in the area. The entire location approach includes offline and online parts: the offline part is used to train data and the online part is used to locate the robot. In this article, the mobile robot using the synchronized receive signal software to collect RSSI data from each AP at a reference point at a known location in offline training. In the process of locating, the mobile robot platform collects the data of the surrounding Wi-Fi signal strength in real time and interacts with the server, and the server processes the received data. Then, the positioning result processed is displayed on the monitoring interface. Meanwhile, the server can also regulate the motion of the robot. After the server and the lower computer work together, the mobile robot can cope with the complex indoor environments and reach the target destination accurately. At last, we can see the specific location of the robot on the monitoring interface.
Robust PCA
Robust PCA is essentially the same as the classical PCA for solving the optimal projection problem of data in low-dimensional space. The robust PCA optimization problem can be expressed as follows 38

X is the acquired signal database and usually contains a lot of random noise, the low rank of X will be destroyed, and X will become full rank. So it is necessary to decompose X into the sum of low-rank matrix A and sparse noise matrix E containing its real structure. Then, we find the low-rank matrix A, which is the essential low-dimensional space of the data. The PCA assumes that the data contain Gaussian noise, while the performance will be affected by large noise or serious outliers. In contrast, the robust PCA does not have this hypothesis. It only assumes that its noise is sparse, regardless of the probability distribution of the noise.
Because of the non-convex and non-smooth properties of L0 norm in optimization, we generally convert it to a relaxed convex optimization problem

where
To solve this optimization problem, we used the augmented Lagrangian multiplier (ALM) method. 39
First add a penalty term to equation (11)

where
Then construct an augmented Lagrangian function L

where Y is the Lagrange multiplier, initialized
Finally, the alternating direction method is used to solve


Robust PCA-ELM
For the classic ELM algorithm, the final result should become unstable due to the randomness of the input weight and hidden layer bias. Therefore, we propose robust PCA-based ELM algorithm.
Assume there are M arbitrary independent location fingerprint samples

where

If the number of hidden nodes is

The reference point position fingerprint
During the online positioning stage, we collect the fingerprint in real time and use the robust PCA model to obtain
Performance verification
In this section, the experimental platform is briefly described. This article has conducted extensive experiments to evaluate the performance of the proposed robust PCA-ELM positioning system and then to explore the experimental results.
Experimental setup
As shown in Figure 4, the localization experiments are performed in the Industrial Robot Laboratory of Robot Center in our university. The size of the lab is 32 × 16 m2, with 107 red dots representing the position of the offline training reference point, 30 yellow triangle marking the location of the test point, and 8 black signal transmission markers representing locations of APs. The lines in Figure 4 are used to divide the area. There are some machine lab equipment and office chairs in each area. The distance between two sampling points is approximately 1.2 m. TP-Link WDR6500 Wi-Fi router is utilized as Wi-Fi AP for our experiments and all APs are installed at a 1.2-m high from the ground.

Deployment of APs, sampling points in the lab. AP: access point.
Five hundred groups of RSSI vector data are collected at each sampling point and scanning interval is set to 250 ms. A total of 53,500 sets of location fingerprint data were collected as training databases in 107 training points and 15,000 sets of position fingerprint data were collected as test databases in 30 testing points. Due to the environment, dynamics has a large impact on the RSS measurements, the offline data collection is performed in different periods of a month, and the offline data are preprocessed to train the robust PCA-ELM model on the server. In the online positioning stage, the server analyzes to resolve the collected RSS data and to reckon the position of the mobile robot with trained robust PCA-ELM model.
Model parameter selection
According to the contents of the section 3 (B), the number of activation functions and hidden layer neurons in the ELM is an important parameter that greatly affects the accurateness of the prediction.
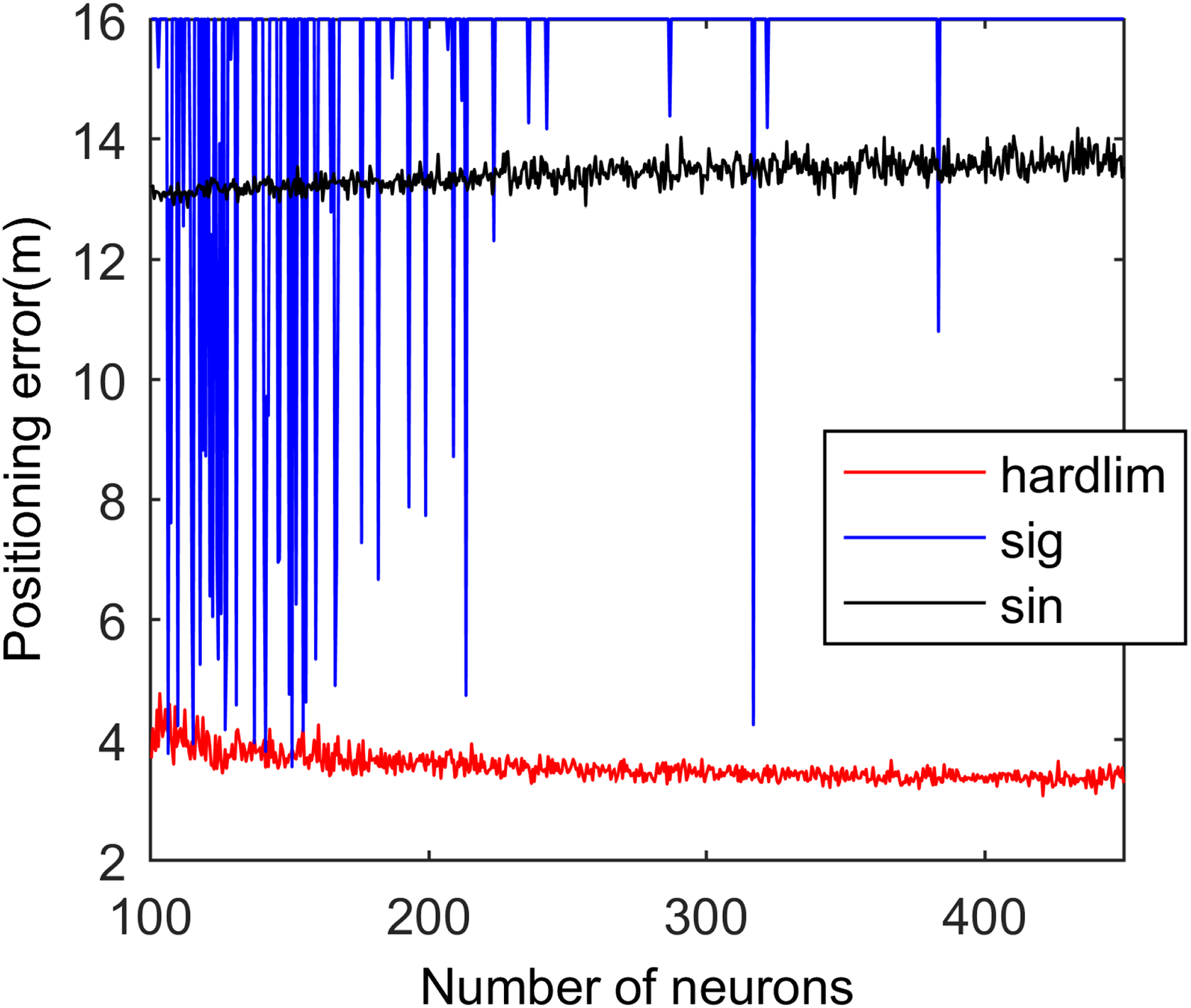
Sin, sig, and hard-limit function are the most widely used activation functions in ELM model. The location estimation error of training points under different number of neurons was compared and analyzed.
As shown in Figure 5, the training accuracy of hard-limit function is obviously higher than that of sin function and sig function. Therefore, in this section, we select the hard-limit function as the activation function. The positioning error curve of the hard-limit function shows that with the increase of a lot of neurons in the hidden layer, the accuracy is improved. The accuracy of localization tends to be stable after the number of neurons reaches 600. Accordingly, 600 is used as the best model parameter in this article.
Positioning accuracy when kernel function and number of neurons change.
Experimental results and analysis
In order to verify the localization performance of the localization system based on robust PCA-ELM, the traditional localization algorithms, K-ELM, namely KNN, OS-ELM, BYS, and classical ELM algorithm are chosen for comparison. In this article, root mean square error (RMSE) and standard deviation (STD) are used to analyze the results


where s is the total number of test samples and s is 15000 in this article.
As shown in Figure 6, the performance of the different algorithms can be clearly seen through the error map. The comparison of the statistical histogram of the error shows that the location error of the robust PCA-ELM algorithm is the smallest, more concentrated distribution and the stability is higher.
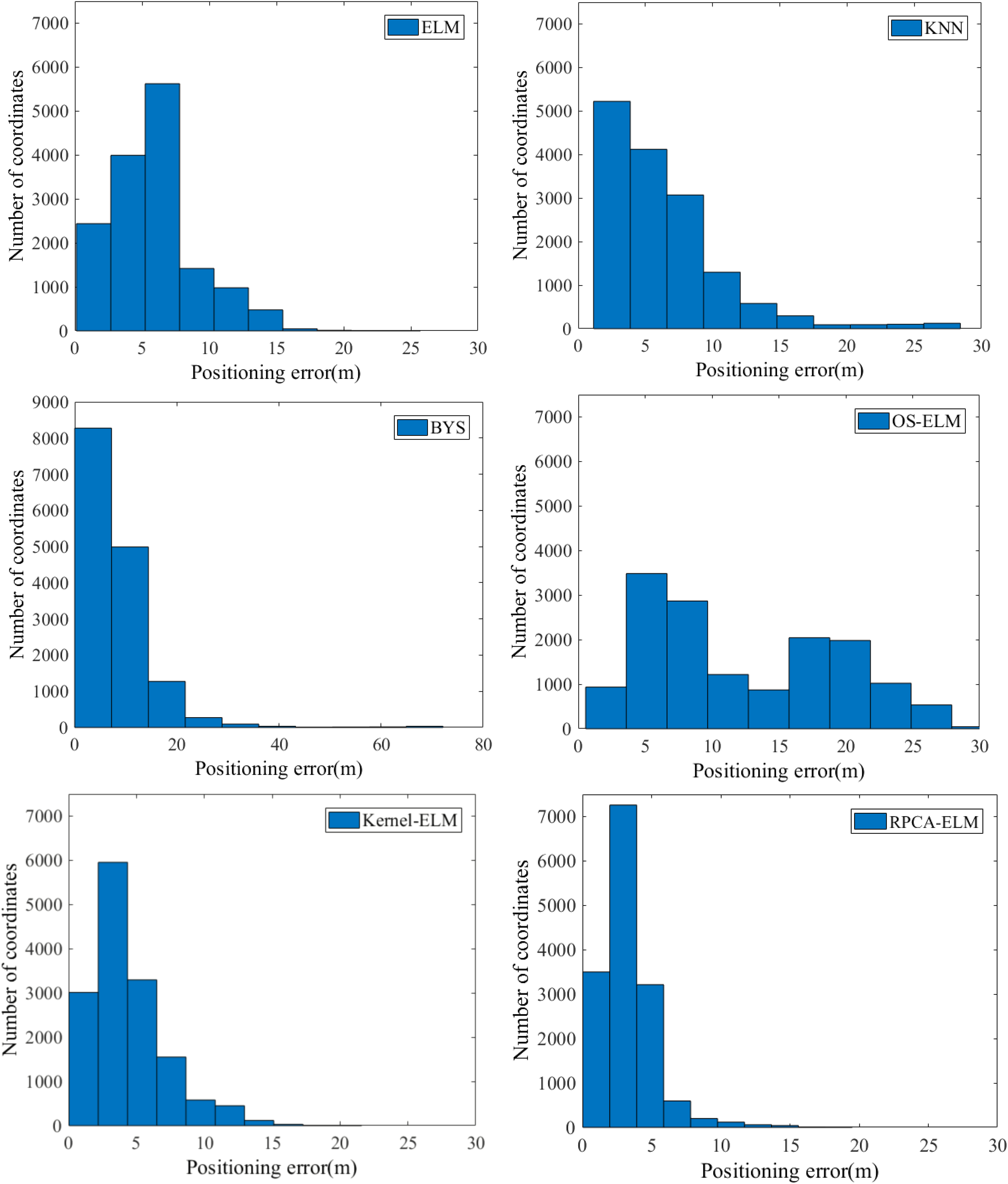
Comparison of positioning errors of various algorithms.
Table 1 shows the performance of six different algorithms. Table 1 demonstrates the superiority in time consumption of ELM, OS-ELM, BYS, and the proposed robust PCA-ELM compared with K-ELM and KNN. Moreover, the ordinary PC cannot perform the K-ELM algorithm due to its high computation complexity. The average positioning accuracy of RPCA-ELM is the highest, which can reach 2.3054 m, K-ELM is second, with an accuracy of 3.6522 m and the average positioning error of other algorithms is more than 4 m.
Comparison of positioning system test results.
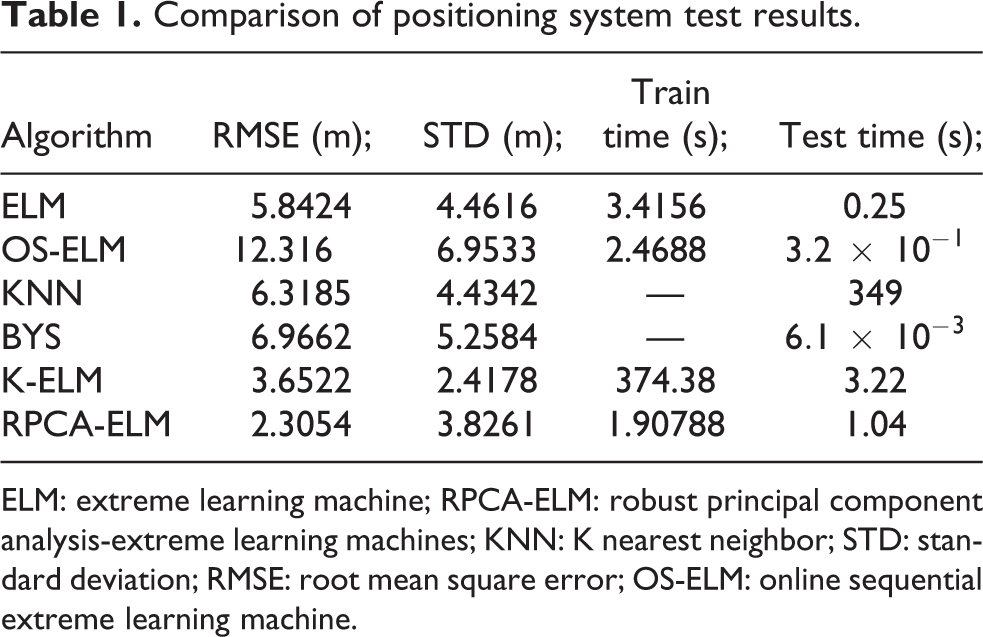
ELM: extreme learning machine; RPCA-ELM: robust principal component analysis-extreme learning machines; KNN: K nearest neighbor; STD: standard deviation; RMSE: root mean square error; OS-ELM: online sequential extreme learning machine.
In Figure 7, we can see the cumulative error values for each of the six algorithms. Obviously, the positioning accuracy of RPCA-ELM is the best of all algorithms. In general, the running speed and prediction accuracy of the PCA-ELM algorithm can well meet the requirements of use, so the RPCA-ELM algorithm is superior to other algorithms. Figure 8 shows that the server displays when it is actually tested, where the predicted position is marked by a black square.

The cumulative error diagram for algorithms.

Display.
Conclusion
We have developed an IPS for mobile robots that can be used in factories, parking lots, and museums to help with area management. In order to solve the problem of mobile robot indoor positioning, this article developed a positioning system using Wi-Fi. This article clearly presented the system design and implementation steps. At the same time, the popular algorithms are discussed. We proposed the robust PCA-ELM scheme that inherits the advantages of both ELM and robust PCA. We compare the robust PCA-ELM algorithm with the traditional KNN, OSELM, BYS, ELM, and K-ELM algorithms. According to the experimental results, the robust PCA-ELM can achieve high precision and real-time positioning. In general, the robust PCA-ELM positioning system designed in this article is cheaper, more accurate, and more robust under the same conditions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (61903231, 61773245, 61603068, 61806113, 91848206, 61973200, 61503224), Shandong Province Natural Science Foundation (ZR2018ZC0436, ZR2018PF011, ZR2018BF020), Scientific Research Foundation of Shandong University of Science and Technology for Recruited Talents(2017RCJJ063) and Taishan Scholarship Construction Engineering.